一种基于无人机的照明控制系统的制作方法
本发明属于无人机智能控制技术,具体的,涉及一种基于无人机的照明控制系统。
背景技术:
1、在锅炉炉膛、隧道等有限甚至是封闭的空间中,需要经常性地进行巡检工作,以排除存在的以及可能存在的安全问题,相较于传统的巡检方式,无人机的引用大大地降低了巡检难度,提升了巡检的工作效率。
2、但是在这些有限的甚至是封闭的空间中,由于照明设施的建设限制以及自然光的传播限制,在通过无人机进行巡检时,需要自带照明系统才能够获得较为清晰的、能够为工作人员分辨的图像信息,然而现有技术中,一方面无人机的续航能力有限,如果不对电池所存储电量做合理的利用,则不利于无人机的巡检续航,另一方面,无人机需要巡检人员操作,以取得合适角度的,能够对巡检区域实现合理覆盖的图像信息,为了解决上述问题,提供一种能够实现自动巡检,且所采集的图像信息能够合理覆盖巡检区域的方法,本发明提供了以下技术方案。
技术实现思路
1、本发明的目的在于提供一种基于无人机的照明装置及其照明控制系统,解决现有技术中无人机需要巡检人员操作,且没有合理地控制缺乏光照区域的照明输出的问题。
2、本发明的目的可以通过以下技术方案实现:
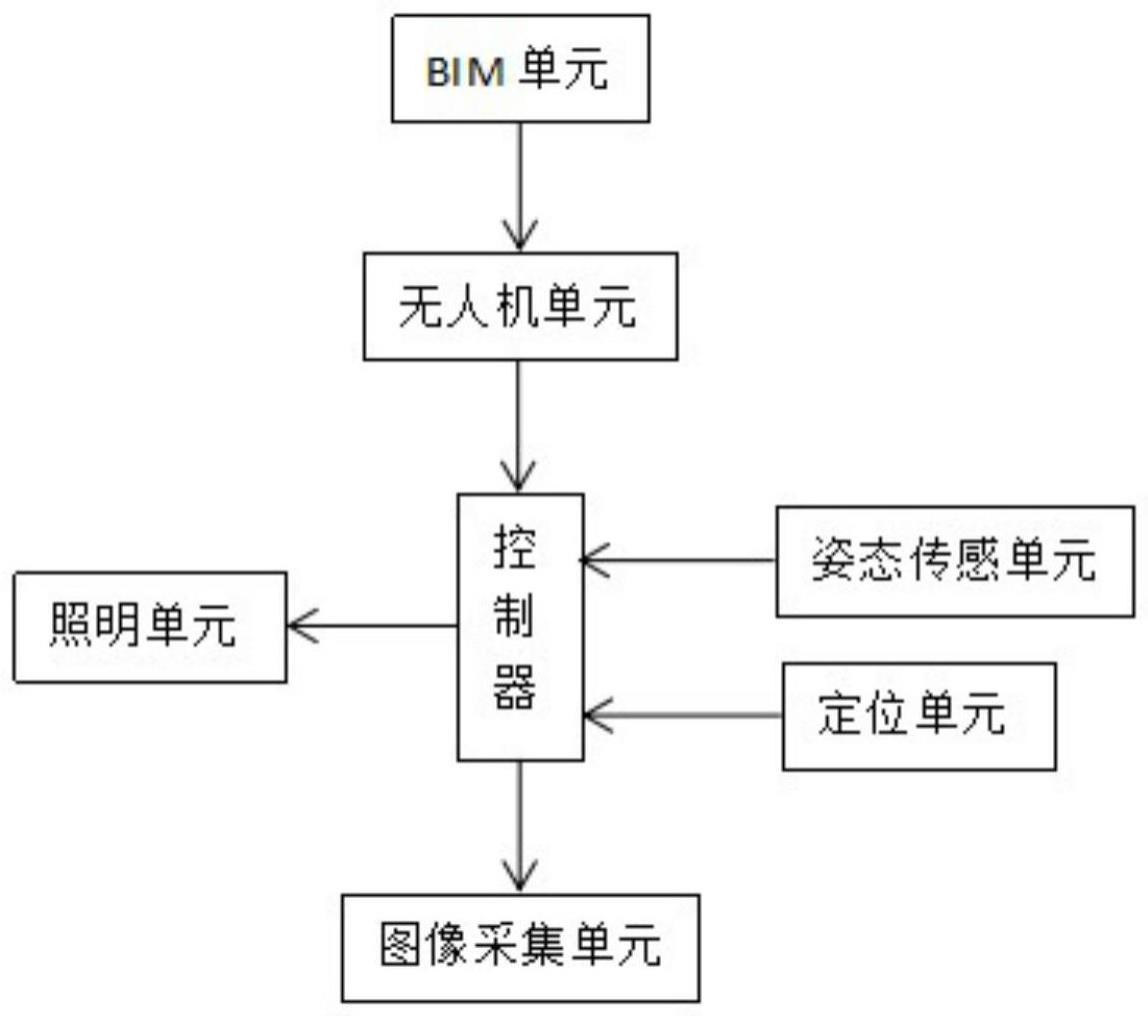
3、一种基于无人机的照明控制系统,包括:
4、无人机单元,用于携带图像采集单元以及照明单元运动;
5、图像采集单元,用于采集被检测空间中需要检测的区域的视频图像信息;
6、所述图像采集单元通过云台安装在无人机单元上,图像采集单元采集视频图像信息的角度能够在预设范围内进行自由调整;
7、照明单元,用于为需要检测的区域进行光照补充;
8、所述照明单元通过云台安装在无人机单元上,照明单元的光线照射方向能够在预设范围内进行自由调整;
9、bim单元,用于建立被检测空间的三维模型,通过三维模型对被检测空间中需要检测的区域的坐标进行确定;
10、控制器,用于对图像采集单元的图像采集角度进行调整,还用于控制照明单元的角度与启闭;
11、姿态传感单元,用于对无人机单元的飞行姿态进行检测;
12、定位单元,用于对无人机单元进行定位,并将获取的无人机单元的位置信息传输至控制器;
13、所述控制器对图像采集单元的图像采集角度以及控制照明单元的角度进行调整的方法为:
14、s1、通过bim单元建立被检测空间的三维模型,获取被检测空间中需要检测的区域的坐标;
15、将被检测空间中需要检测的区域标记为目标区域;
16、根据目标区域的坐标对无人机单元在被检测空间中的巡检轨迹进行规划,得到无人机单元在被检测空间内的巡检轨迹;
17、s2、根据无人机单元在被检测空间内的巡检轨迹,获取无人机单元按照巡检轨迹进行运动时,图像采集单元相对于预设坐标系的立体角q变化;
18、图像采集单元的立体角变化应当能够保证所采集的目标区域图像始终尽可能与图像采集单元的摄像头正对;
19、s3、在无人机单元按照巡检轨迹运动时,通过定位单元获取无人机单元的实际坐标;
20、获取巡检轨迹中与实际坐标距离最近的点的坐标,将该最近的点标记为等价点;
21、获取等价点与实际坐标之间的空间位置关系;
22、获取等价点对应的图像采集单元的立体角q,并根据立体角q以及等价点的坐标以及目标区域的位置获取图像采集单元获取的图像范围;
23、然后根据图像采集单元当前的实际角度、等价点与实际坐标之间的空间位置关系以及无人机单元的飞行姿态对图像采集单元的角度进行调整,使等价点对应的图像范围有θ%以上处于图像采集单元采集的视频图像中,其中θ为预设值;
24、其中照明单元的照射区域应当能够始终覆盖图像采集单元所采集图像信息对应的目标区域部分。
25、作为本发明的进一步方案,无人机单元的所述巡检轨迹应当满足:在巡检过程中,所有的目标区域的图像信息都能够被图像采集单元所采集,且在图像采集单元采集对应目标区域的图像信息时,图像采集单元与目标区域之间的最大距离不大于预设值a1。
26、作为本发明的进一步方案,θ取值为85%。
27、作为本发明的进一步方案,所述控制器对控制照明单元的启闭进行控制的方法为:在无人机单元按照巡检轨迹运动时,控制器每隔预设时间t1在图像采集单元输入的视频图像中获取一帧图片,将获取的各帧图片标记为识别帧图像;
28、通过控制器对识别帧图像进行分析,获取各识别帧图像的亮度直方图;
29、当对应识别帧图像中对应rgb值小于预设值α的像素数量占比大于预设比例γ时,则认为获取的对应识别帧图像缺乏光照,控制器控制照明单元开启,为对应的目标区域提供光照;
30、其中α与γ均为预设值。
31、作为本发明的进一步方案,γ取值为50%。
32、作为本发明的进一步方案,在无人机巡检过程中,无论照明单元是否工作,照明单元照射角度与图像采集单元角度均同步调整。
33、作为本发明的进一步方案,当对应识别帧图像中对应rgb值小于预设值α的像素数量占比小于等于预设比例γ时,则认为获取的对应识别帧图像光照充足;
34、若照明单元为开启状态,且在过去的预设时间t2内,采集的各识别帧图像均光照充足,则控制器控制照明单元关闭。
35、本发明的有益效果:
36、1、本发明中能够通过无人机单元实现对有限的甚至密封的空间进行自动巡检,且巡检过程中能够根据无人机单元的实际位置实时地对图像采集单元的角度进行调整,以保证预设的图像范围始终处于画面中,从而保证巡检数据的完整性,避免在无人机的巡检过程中出现部分目标区域的缺失,影响后续的分析判断的问题出现;
37、2、本发明通过在无人机单元上设置同步的照明单元,通过无人机单元的位置以及图像采集单元所采集的图像对照明单元的启闭提供智能控制,从而在不影响所采集的图像质量的前提下,有效降低了巡检过程中照明单元的能耗,从而提升无人机单元的单次有效巡检距离,且能够在巡检过程中为锅炉炉膛、隧道等环境中缺乏光照的区域针对性地提供光照,使采集的图像信息能够为工作人员的判断提供有效支撑。
技术特征:
1.一种基于无人机的照明控制系统,其特征在于,包括:
2.根据权利要求1所述的一种基于无人机的照明控制系统,其特征在于,无人机单元的所述巡检轨迹应当满足:在巡检过程中,所有的目标区域的图像信息都能够被图像采集单元所采集,且在图像采集单元采集对应目标区域的图像信息时,图像采集单元与目标区域之间的最大距离不大于预设值a1。
3.根据权利要求1所述的一种基于无人机的照明控制系统,其特征在于,θ取值为85%。
4.根据权利要求2所述的一种基于无人机的照明控制系统,其特征在于,所述控制器对控制照明单元的启闭进行控制的方法为:在无人机单元按照巡检轨迹运动时,控制器每隔预设时间t1在图像采集单元输入的视频图像中获取一帧图片,将获取的各帧图片标记为识别帧图像;
5.根据权利要求4所述的一种基于无人机的照明控制系统,其特征在于,γ取值为50%。
6.根据权利要求4所述的一种基于无人机的照明控制系统,其特征在于,在无人机巡检过程中,无论照明单元是否工作,照明单元照射角度与图像采集单元角度均同步调整。
7.根据权利要求4所述的一种基于无人机的照明控制系统,其特征在于,当对应识别帧图像中对应rgb值小于预设值α的像素数量占比小于等于预设比例γ时,则认为获取的对应识别帧图像光照充足;
技术总结
本发明公开了一种基于无人机的照明控制系统,属于无人机智能控制技术领域,该照明控制系统能够通过无人机单元实现对有限的甚至密封的空间进行自动巡检,且巡检过程中能够根据无人机单元的实际位置实时地对图像采集单元的角度进行调整,以保证预设的图像范围始终处于画面中,从而保证巡检数据的完整性,避免影响后续的分析判断的问题出现;另外,本发明通过无人机单元的位置以及图像采集单元所采集的图像对照明单元的启闭提供智能控制,从而在不影响所采集的图像质量的前提下,有效降低了巡检过程中照明单元的能耗,能够在巡检过程中为锅炉炉膛、隧道等环境中缺乏光照的区域针对性地提供光照,使采集的图像信息能够为工作人员的判断提供有效支撑。
技术研发人员:李娜,成鑫,牛猛
受保护的技术使用者:国重(昆山)航空智能科技有限责任公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!