一种叠层结构的电致伸缩型人工肌肉、制备方法及其应用
本发明涉及人工肌肉,具体为一种叠层结构的电致伸缩型人工肌肉、制备方法及其应用。
背景技术:
1、人工肌肉因柔韧性好、工艺便捷、质量轻、容易变形等优势,在仿生器具、假肢、机器人等领域具有较大的应用前景。人工肌肉在外界刺激(磁场、温度、电场、ph、光等)作用下可以产生显著变形,通过变形,结合人工肌肉的灵活性等特点,可以布局在柔性机器人或狭窄/微型结构中,实现某些功能。同时,其柔韧性好,动作轻柔的特点,在人、环境和机器交互领域具有广阔的应用前景。在各种驱动模式中,电驱动人工肌肉可以将电能转化成机械能实现介电高弹聚合物应变,由于具有可控应变大、快速响应、成本低等优势广泛应用于控制器、软体机器人、航空航天等领域。
2、目前,人工肌肉的输出频率还无法和动物肌肉相比,是阻碍其实际应用的关键问题之一。现有的人工肌肉结构,在热源、电化学、光源等驱动源刺激下体积发生膨胀已达到伸缩的驱动效果。science robotics(science robotics,6,eabi9704,2021)()杂志报道利用静电纺丝工艺从液晶弹性体中创造人造纤维,这种人工肌肉可以用热或近红外光激活,且在抗拉强度、高功率密度可以和人类肌肉媲美,但是该人工肌肉的响应能力只有2hz。science(science,371,494,2021)杂志报道一种通过扭曲、缠绕碳纳米管或聚合物纱线的电化学人工肌肉,最大平均输出功率达到2.9w/g。采用爽卷法将氧化石墨烯引入上述人工肌肉纤维,最大平均输出功率提高到8.2w/g,1hz驱动频率达到8%的应变。中国专利文献(公开号:cn114654500a)公开了一种双响应碳纤维基混合纱线人工肌肉,施加0.46mpa应力,最高可以产生高达45.5%的输出应变,响应频率为0.05~0.5hz。acs appliedmaterials&interfaces(acs applied materials&interfaces,12,23432,2020)杂志报道采用硝基苯胺(na)改性聚硅氧烷形成高介电弹性体,在电场驱动下,7.5v/μm实现8%应变,驱动频率为0.1~10hz。
3、上述报道的人工肌肉应变和驱动频率在实际应用过程中凸显出驱动应变小、驱动频率低等局限性。
技术实现思路
1、针对现有技术中存在的问题和不足,本发明提供了一种叠层结构的电致伸缩型人工肌肉、制备方法及其应用,实现大驱动应变和高频率的驱动响应,同时实现主动伸长和主动收缩两种驱动响应。
2、为了实现以上技术目的,本发明采用以下技术方案:
3、一种叠层结构的电致伸缩型人工肌肉的制备方法,包括以下步骤:
4、(1)在基体骨架平板材料一侧制备电极层,得到复合材料a;
5、(2)以步骤(1)得到的复合材料a中间打孔,得到复合材料b;
6、(3)以步骤(2)得到的复合材料b为模板,获得掩膜板层材料c;
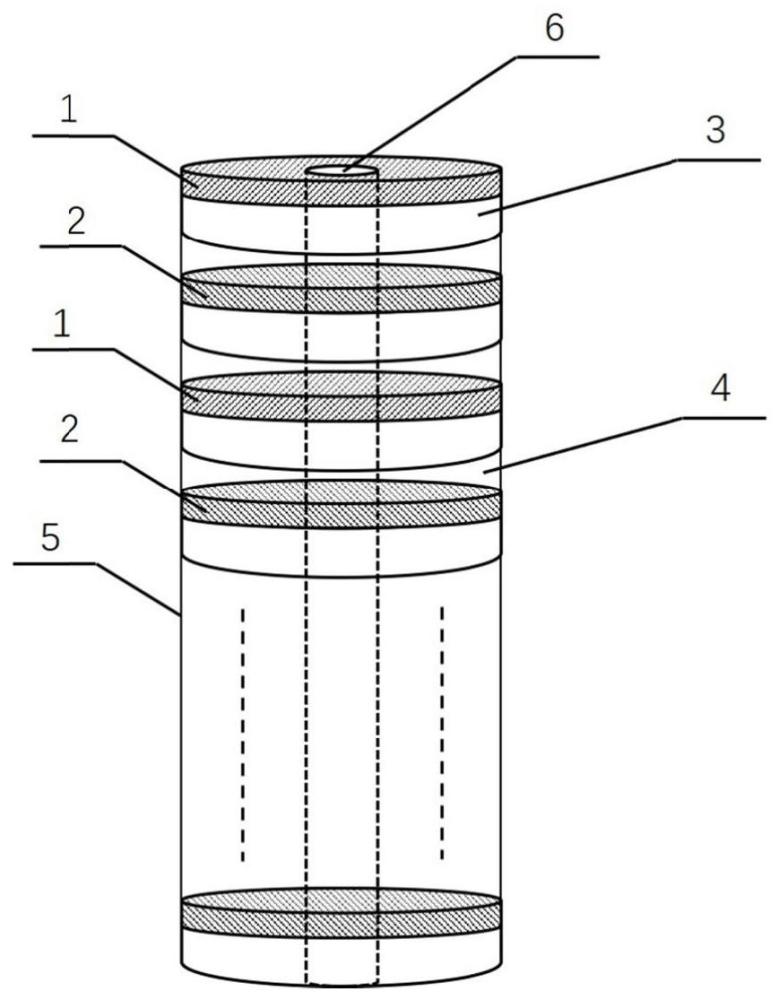
7、(4)对步骤(2)中复合材料b和步骤(3)的掩膜板材料c进行依次叠加,即每两个复合材料b中间夹一层材料c,中间的孔上下对齐,得到样品d;
8、(5)对步骤(4)中得到的样品d进行包覆封装,以固定样品d的形状得到样品e;
9、(6)对步骤(5)中得到的样品e进行掩膜板层c的溶解,得到样品f;
10、(7)对步骤(6)中的样品f进行外接电极,最终得到人工肌肉器件m。
11、进一步地,步骤(1)中所述基体骨架平板材料包括聚酰亚胺、聚偏二氟乙烯、聚乙烯醇中的一种或多种,所述基体骨架平板材料形状为圆形或正方形。
12、进一步地,步骤(1)中平板材料的电极通过但不限于丝网印刷、电路打印、喷涂、蒸镀、气相沉积、提拉、旋涂、热压或粘贴的方法将导电银胶、液态金属、导电氧化物、石墨烯、碳纳米管、金属纳米线、铜箔、导电胶带中的一种或多种与上述平板材料复合。
13、进一步地,层间距由掩膜板层和平板层厚度决定,步骤(3)所述掩膜板层材料和步骤(1)中的骨架平板材料不能溶于同一种溶剂。
14、进一步地,步骤(4)中所述的掩膜板材料c包括水溶性生物膜、聚乙烯醇、聚丙烯、聚碳酸酯、聚甲基丙烯酸甲脂、玻璃中的一种或多种。
15、进一步地,步骤(5)中包覆封装方法包括涂覆、提拉、喷涂、蒸镀、静电纺丝中的一种,包覆封装过程中采用包括硅橡胶、天然橡胶、高弹性聚酰胺、聚酰亚胺、热塑性弹性、丁苯橡胶中的一种或多种,且采用的封装材料和掩膜板材料不能溶于同一种溶剂,所述封装保留最上面一层的中间孔,其他部分完全封装。
16、进一步地,步骤(7)中相邻电极施加相同符号电压实现伸长驱动,相邻电极施加不同符号电压或者一方电极施加任意符号电压,另一方电极接地,实现收缩驱动。
17、本发明还提供一种叠层结构的电致伸缩型人工肌肉在制备智能驱动装置或机构中的应用。
18、进一步地,所述智能驱动装置或机构包括柔性机器人、可穿戴外骨骼、医疗机器人、仿生假肢中的一种。
19、本发明具有如下有益效果:
20、(1)本发明的叠层结构的电致伸缩型人工肌肉,可实现大驱动应变和高频率的驱动响应,同时实现主动伸长和主动收缩两种驱动响应。
21、(2)本发明的人工肌肉纤维具有螺旋形纤维形式、在电驱动下可实现主动伸长和主动收缩,可实现高频响应。
22、(3)本发明的人工肌肉具有驱动频率高,驱动应变大的特点,适用于柔性机器人、可穿戴外骨骼、医疗机器人和仿生假肢等应用场景。
技术特征:
1.一种叠层结构的电致伸缩型人工肌肉的制备方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的叠层结构的电致伸缩型人工肌肉的制备方法,其特征在于,步骤(1)中所述基体骨架平板材料包括聚酰亚胺、聚偏二氟乙烯、聚乙烯醇中的一种或多种,所述基体骨架平板材料形状为圆形或正方形。
3.根据权利要求1所述的叠层结构的电致伸缩型人工肌肉的制备方法,步骤(1)中平板材料的电极通过但不限于丝网印刷、电路打印、喷涂、蒸镀、气相沉积、提拉、旋涂、热压或粘贴的方法将导电银胶、液态金属、导电氧化物、石墨烯、碳纳米管、金属纳米线、铜箔、导电胶带中的一种或多种与上述平板材料复合。
4.根据权利要求1所述的叠层结构的电致伸缩型人工肌肉的制备方法,层间距由掩膜板层和平板层厚度决定,其特征在于,步骤(3)所述掩膜板层材料和步骤(1)中的骨架平板材料不能溶于同一种溶剂。
5.根据权利要求1所述的叠层结构的电致伸缩型人工肌肉的制备方法,其特征在于,步骤(4)中所述的掩膜板材料c包括水溶性生物膜、聚乙烯醇、聚丙烯、聚碳酸酯、聚甲基丙烯酸甲脂、玻璃中的一种或多种。
6.根据权利要求1所述的叠层结构的电致伸缩型人工肌肉的制备方法,步骤(5)中包覆封装方法包括涂覆、提拉、喷涂、蒸镀、静电纺丝中的一种,包覆封装过程
7.根据权利要求1所述的叠层结构的电致伸缩型人工肌肉的制备方法,步骤(7)中相邻电极施加相同符号电压实现伸长驱动,相邻电极施加不同符号电压或者一方电极施加任意符号电压,另一方电极接地,实现收缩驱动。
8.一种根据权利要求1-7任一项所述方法制备的叠层结构的电致伸缩型人工肌肉。
9.一种根据权利要求8所述的叠层结构的电致伸缩型人工肌肉在制备智能驱动装置或机构中的应用。
10.根据权利要求9所述的叠层结构的电致伸缩型人工肌肉在制备智能驱动装置和机构中的应用,其特征在于,所述智能驱动装置或机构包括柔性机器人、可穿戴外骨骼、医疗机器人、仿生假肢中的一种。
技术总结
本发明公开了一种叠层结构的电致伸缩型人工肌肉的制备方法,包括以下步骤:(1)在基体骨架平板材料一侧制备电极层,得到复合材料A;(2)以步骤(1)得到的复合材料A中间打孔,得到复合材料B;(3)以步骤(2)得到的复合材料B为模板,获得掩膜板层材料C;(4)对步骤(2)中复合材料B和步骤(3)的掩膜板材料C进行依次叠加,即每两个复合材料B中间夹一层材料C,中间的孔上下对齐,得到样品D;(5)对步骤(4)中得到的样品D进行包覆封装,以固定样品D的形状得到样品E;(6)对步骤(5)中得到的样品E进行掩膜板层C的溶解,得到样品F;(7)对步骤(6)中的样品F进行外接电极,最终得到人工肌肉器件M。本发明的人工肌肉具有驱动频率高,驱动应变大的特点,适用于柔性机器人、可穿戴外骨骼、医疗机器人和仿生假肢等应用场景。
技术研发人员:田祥岭,魏荣妃
受保护的技术使用者:电子科技大学长三角研究院(衢州)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!