一种找载带料头装置及其工作方法与流程
本发明属于贴装领域,尤其涉及电子元器件贴装,具体是一种处理新料盘的载带料头的设备和工艺。
背景技术:
1、载带是一种应用于电子贴装领域的带状产品,具备特定的厚度,在其长度方向上等距分布着用于承放电子元器件的孔穴(型腔)和用于进行索引定位的定位孔。生产完成后进行贮存和运输的载带是以缠绕在料盘上的形式保存的,料盘缠绕一卷载带后,会在载带的端头处设置有带有标记的料头,料头再通过盖膜和料头引带覆盖粘在卷盘载带的外表面上,通过牵拉料头引带能够带出载带进行贴装,使用载带之前还需要提前将料头及引带去掉,将载带暴露出来,才能进行后续的工作。
2、目前采用载带进行电子元器件进行贴装的设备多选择人工处理的办法,先将卷盘载带料盘上载带外的盖膜或料头引带找出剪掉料头,然后将料盘放置到贴装设备对应的位置,牵拉出载带的端头放置到指定的位置,然后启动贴装设备进行对电子元器件的贴装工作。由于人工牵拉和放置,往往无法做到对载带的准确定位,人工操作稳定性差,处理效率低,越来越难以满足贴装的需求。
3、现有技术中存在对牵拉到位的载带料头进行裁剪的设备,但缺乏将带有盖膜或引带的料头牵拉到位的设备,对于新料盘,仍未发现实现全自动化的处理方案。
技术实现思路
1、为了解决现有技术的不足,本发明提出了一种找载带料头装置及其工作方法,准确定位新料盘上载带料头的位置并牵拉出来。
2、本发明要解决的技术问题是通过以下技术方案实现的:
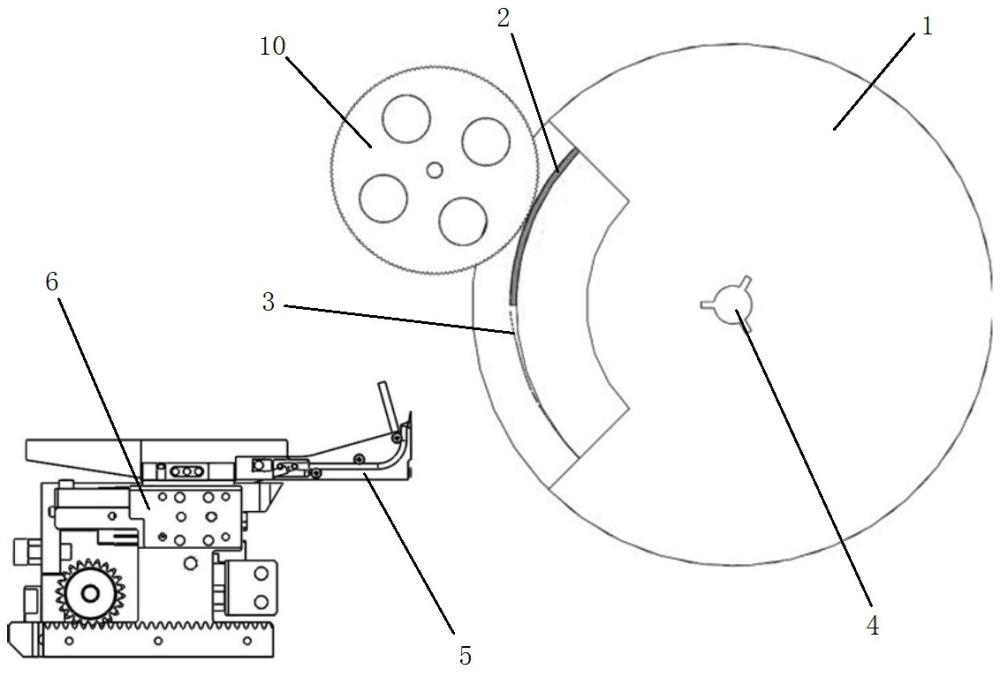
3、一种找载带料头装置,设置在接料机上,包括机架,机架上设置有料盘架和刮刀模组,料盘架包括转轴,料盘的中心套设在转轴上,刮刀模组设置在料盘架的一侧,朝向料盘架上料盘的载带及轨道,刮刀模组包括刮刀架和刮刀,刮刀设置在刮刀架的前端,刮刀所在平面与料盘上的载带相切,柔性贴附到料盘上的载带表面,且刮刀刃口朝向刮刀与料盘载带的相接处,朝向料盘上载带送来的方向。
4、在本发明中,所述刮刀模组通过刮刀伸缩模组设置到机架上,刮刀伸缩模组包括柔性顶压结构。
5、在本发明中,所述刮刀架上设置有感应器,感应器位于刮刀的下方,感应器的识别端朝向料盘上的载带,识别载带料头处的标记,如颜色标记。
6、进一步的,所述的料盘架的转轴由步进电机带动,可自由正向和反向转动一定的角度。
7、进一步的,所述的料盘架外侧设置有辅助轮,辅助轮为摩擦轮,通过辅助轮推送模组推动,顶压到料盘轨道的载带上。
8、进一步的,所述辅助轮由辅助轮电机带动转动,转动方向与料盘转动方向相反。
9、在本发明中,所述的刮刀伸缩模组的柔性顶压结构包括弹簧,推动刮刀顶压到料盘的载带上柔性接触。
10、在本发明中,所述刮刀的刃口为平口或锯齿形。
11、基于上述结构的找载带料头装置,其工作方法包括以下步骤:
12、s1:放料盘:将新料盘放置到料盘架上,料盘的中心套设到料盘架的转轴上;
13、s2:推送刮刀:刮刀伸缩模组推送刮刀模组,使得刮刀模组靠近料盘载带,料盘架的步进电机驱动转轴带动料盘正向转动;
14、s3:定位料头:辅助轮推送模组推送辅助轮,使得辅助轮顶压到料盘轨道的载带上,刮刀伸缩模组推送刮刀模组,使得刮刀的刃口柔性贴附到料盘上的载带表面,贴附后微量后退,然后料盘架的步进电机驱动转轴带动料盘正向转动,辅助轮电机带动辅助轮转动与料盘配合,刮刀模组的感应器识别到料盘上载带料头处的标记后,料盘架的步进电机驱动转轴带动料盘反向转动一定角度,使得载带料头回退到刮刀的刃口前上方后,刮刀模组前伸柔性贴附到料盘上的载带;
15、s4:切割台阶盖膜:刮刀模组的刮刀随着料盘的转动,插入到载带料头端头处的台阶下方,切断载带料头端头处的引带或盖膜,并将载带随料头抬起;
16、s5:送出载带头:料盘旋转送出载带头至料头轨道,后续相机拍照识别料头有无料分界位。
17、与现有技术相比,本发明具有以下优点:
18、本申请将刮刀贴附到料盘上的载带表面,由于载带及料头有一定厚度,引带或盖膜覆盖在料头外时,使得载带料头端头处呈现出一定台阶,刮刀刃口指向载带送来的方向,能够方便的切断料头处的应该或盖膜,并将载带及料头从料盘上引出,方便后续应用;
19、本申请将料盘通过正反转步进电机带动,能够有效的控制料盘,使其与刮刀充分交互,提高刮刀的工作效果;
20、本申请在刮刀处设置感应器,识别并准确定位料盘上载带料头的位置,提高刮刀的工作效率;
21、本申请通过辅助轮静压料盘上的载带,并随之转动,使得刮刀在工作过程中,载带不至于受力后退,更进一步提高刮刀的工作效果和工作效率;
22、本申请的刮刀模组在柔性顶压结构的作用下静压到料盘的载带表面,避免刮刀对料盘载带的刚性推压时可能带来的损伤;
23、本申请的工作方法各环节均为自动进行或基于一定反馈条件启动,无人化、自动化程度高。
24、因此,本发明构思新颖,设计巧妙,能够准确定位新料盘上载带料头的位置并牵拉出来,处理效率高,自动化程度高。
技术特征:
1.一种找载带料头装置,其特征在于:设置在接料机上,包括机架,机架上设置有料盘架和刮刀模组,料盘架包括转轴,料盘的中心套设在转轴上,刮刀模组设置在料盘架的一侧,朝向料盘架上料盘的载带及轨道,刮刀模组包括刮刀架和刮刀,刮刀设置在刮刀架的前端,刮刀所在平面与料盘上的载带相切,柔性贴附到料盘上的载带表面,且刮刀刃口朝向刮刀与料盘载带的相接处,朝向料盘上载带送来的方向。
2.根据权利要求1所述的找载带料头装置,其特征在于:所述刮刀模组通过刮刀伸缩模组设置到机架上,刮刀伸缩模组包括柔性顶压结构。
3.根据权利要求1所述的找载带料头装置,其特征在于:所述刮刀架上设置有感应器,感应器位于刮刀的下方,感应器的识别端朝向料盘上的载带,识别载带料头处的标记。
4.根据权利要求3所述的找载带料头装置,其特征在于:所述的料盘架的转轴由步进电机带动,可自由正向和反向转动一定的角度。
5.根据权利要求3所述的找载带料头装置,其特征在于:所述的料盘架外侧设置有辅助轮,辅助轮为摩擦轮,通过辅助轮推送模组推动,顶压到料盘轨道的载带上。
6.根据权利要求5所述的找载带料头装置,其特征在于:所述辅助轮由辅助轮电机带动转动,转动方向与料盘转动方向相反。
7.根据权利要求2所述的找载带料头装置,其特征在于:所述的刮刀伸缩模组的柔性顶压结构包括弹簧。
8.根据权利要求1所述的找载带料头装置,其特征在于:所述刮刀的刃口为平口或锯齿形。
9.一种找载带料头装置的工作方法,基于权利要求1-8任一所述的找载带料头装置,其特征在于:包括以下步骤:
10.根据权利要求9所述的工作方法,其特征在于:定位料头步骤中,刮刀模组的感应器识别到料盘上载带料头处的标记后,料盘架的步进电机驱动转轴带动料盘反向转动一定角度,使得载带料头回退到刮刀的刃口前上方后,然后刮刀贴附到料盘上的载带表面。
技术总结
一种找载带料头装置及其工作方法,涉及电子元器件贴装,设置在接料机上,包括机架,机架上设置有料盘架和刮刀模组,料盘架包括转轴,料盘的中心套设在转轴上,刮刀模组设置在料盘架的一侧,朝向料盘架上料盘的载带及轨道,刮刀模组包括刮刀架和刮刀,刮刀设置在刮刀架的前端,刮刀所在平面与料盘上的载带相切,柔性贴附到料盘上的载带表面,且刮刀刃口朝向刮刀与料盘载带的相接处,朝向料盘上载带送来的方向,配套的工作方法通过放料盘、推送刮刀、定位料头、切割台阶盖膜、送出载带头等环节实现对新料盘上载带料头的定位和牵拉。本发明构思新颖,设计巧妙,能够准确定位新料盘上载带料头的位置并牵拉出来,处理效率高,自动化程度高。
技术研发人员:刘继成,马金勇,马阔,王雪,魏伟伟,闫艳芳,张振科,景国志
受保护的技术使用者:河南众驰富联精工科技有限公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!