一种地铁列车巡检机器人的接口电路板的制作方法
本技术涉及接口电路板,尤其涉及一种地铁列车巡检机器人的接口电路板。
背景技术:
1、接口电路板在很多设备上都有应用,不同的功能需求需要特定的接口电路。
2、目前,地铁列车巡检机器人的接口电路板一般只设置了充电接口、数据usb接口、有线网口等少量的接口,具有局限性,现场调试使用操作时非常不便。
3、因此,需要对现有技术进行改进。
4、以上信息作为背景信息给出只是为了辅助理解本公开,并没有确定或者承认任意上述内容是否可用作相对于本公开的现有技术。
技术实现思路
1、本实用新型提供一种地铁列车巡检机器人的接口电路板,以解决现有技术中的不足。
2、为实现上述目的,本实用新型提供以下的技术方案:
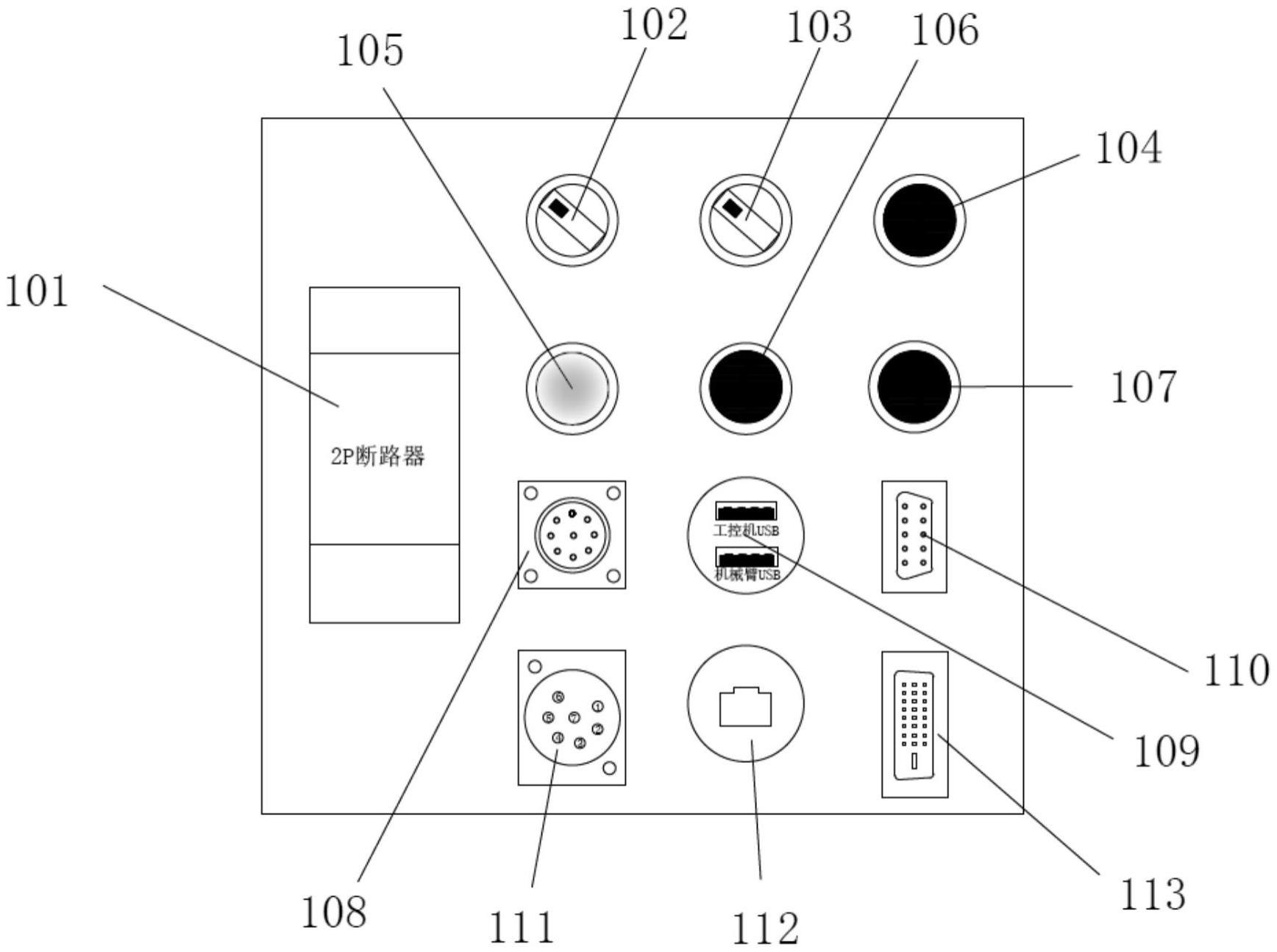
3、一种地铁列车巡检机器人的接口电路板,包括电路板体,所述电路板体上分别设置有断路器、手动解闸转换开关、手动充电转换开关、触摸屏显示切换按钮、电源开启按钮、电源关闭按钮、故障复位按钮、9芯航插孔座、数据传输usb3.0接口座、db9型数据接口座、手操器航插座、网络接口和机械臂示教器触摸屏接口。
4、进一步地,所述地铁列车巡检机器人的接口电路板中,所述电源开启按钮通过所述断路器与电源连接。
5、进一步地,所述地铁列车巡检机器人的接口电路板中,所述手动解闸转换开关与车轮抱闸连接。
6、进一步地,所述地铁列车巡检机器人的接口电路板中,所述手动充电转换开关与充电模块连接;
7、所述充电模块与电源的充电线路连接。
8、进一步地,所述地铁列车巡检机器人的接口电路板中,所述触摸屏显示切换按钮与kvm切换器连接;
9、所述kvm切换器分别与工控机和机械臂的dvi接口连接。
10、进一步地,所述地铁列车巡检机器人的接口电路板中,所述数据传输usb3.0接口座包括上层接口座和下层接口座;
11、所述kvm切换器通过所述上层接口座与工控机连接;
12、所述kvm切换器通过所述下层接口座与机械臂的dvi接口连接。
13、进一步地,所述地铁列车巡检机器人的接口电路板中,所述电源开启按钮、电源关闭按钮和故障复位按钮均为自复位按钮。
14、进一步地,所述地铁列车巡检机器人的接口电路板中,所述9芯航插孔座与机械臂的电源接口连接。
15、进一步地,所述地铁列车巡检机器人的接口电路板中,所述db9型数据接口座与机械臂控制板db9接口连接。
16、进一步地,所述地铁列车巡检机器人的接口电路板中,所述机械臂示教器触摸屏接口;
17、所述机械臂示教器触摸屏接口与机械臂的dvi接口连接。
18、与现有技术相比,本实用新型具有以下有益效果:
19、本实用新型提供的一种地铁列车巡检机器人的接口电路板,通过将各种接口集成在电路板体上,不仅使得现场调试使用操作变得非常方便,而且结构简单、稳定性好、实用性高。
技术特征:
1.一种地铁列车巡检机器人的接口电路板,包括电路板体,其特征在于,所述电路板体上分别设置有断路器(101)、手动解闸转换开关(102)、手动充电转换开关(103)、触摸屏显示切换按钮(104)、电源开启按钮(105)、电源关闭按钮(106)、故障复位按钮(107)、9芯航插孔座(108)、数据传输usb3.0接口座(109)、db9型数据接口座(110)、手操器航插座(111)、网络接口(112)和机械臂示教器触摸屏接口(113)。
2.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述电源开启按钮(105)通过所述断路器(101)与电源连接。
3.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述手动解闸转换开关(102)与车轮抱闸连接。
4.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述手动充电转换开关(103)与充电模块连接;
5.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述触摸屏显示切换按钮(104)与kvm切换器连接;
6.根据权利要求5所述的地铁列车巡检机器人的接口电路板,其特征在于,所述数据传输usb3.0接口座(109)包括上层接口座和下层接口座;
7.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述电源开启按钮(105)、电源关闭按钮(106)和故障复位按钮(107)均为自复位按钮。
8.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述9芯航插孔座(108)与机械臂的电源接口连接。
9.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述db9型数据接口座(110)与机械臂控制板db9接口连接。
10.根据权利要求1所述的地铁列车巡检机器人的接口电路板,其特征在于,所述机械臂示教器触摸屏接口(113);
技术总结
本技术涉及接口电路板技术领域,公开了一种地铁列车巡检机器人的接口电路板,包括电路板体,所述电路板体上分别设置有断路器、手动解闸转换开关、手动充电转换开关、触摸屏显示切换按钮、电源开启按钮、电源关闭按钮、故障复位按钮、9芯航插孔座、数据传输USB3.0接口座、DB9型数据接口座、手操器航插座、网络接口和机械臂示教器触摸屏接口。本技术提供的一种地铁列车巡检机器人的接口电路板,通过将各种接口集成在电路板体上,不仅使得现场调试使用操作变得非常方便,而且结构简单、稳定性好、实用性高。
技术研发人员:吴耿才,徐昌源,王局,曾德垚,胡孝楠,尹三勇,孙韬,朱晓东,董辉,张金生,侯富荣
受保护的技术使用者:东莞市诺丽科技股份有限公司
技术研发日:20230703
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!