通过移动设备和基站设备触发基于接近度的数字动作的制作方法
1.本发明总体上涉及移动通信,并且更具体地涉及根据移动设备到物理位置的接近度利用移动设备来触发某种数字动作。更具体地说,本发明涉及触发基于接近度的数字动作的方法,该方法涉及移动设备和基站设备。本发明还涉及用于在该方法中实现移动设备的功能性的移动计算设备,并且涉及用于在该方法中实现基站设备的功能性的基站设备。此外,本发明涉及相关的通信系统。
背景技术:
2.随着近十年来诸如智能手机和平板电脑之类的移动设备在市场上的巨大渗透,人们普遍希望能够不仅将移动设备用作电信手段,而且将其用作便利其用户日常生活的工具。如今,移动设备被用作小型化的个人计算设备,并且还用于电子商务或实体商务、数字内容的消费、游戏、社交网络等中的不同服务。
3.在各种情况下,可能希望在人靠近物理位置时执行动作。
4.例如,在零售场所(例如商店、超市或购物中心)中,可能希望允许人在利用他或她的移动设备参与的数字交易中做出肯定、拒绝或取消的动作,或向其提供涉及在该场所内特定地点提供的物品的信息,例如测试报告、情况说明书、烹饪食谱、营养信息、优惠券等。
5.在办公场所中,例如可能希望人执行登记动作,或控制办公设备,或订购需要在办公室中补充的商品或某些办公设备所需的服务。
6.在住宅场所中,例如可能希望人在接近家用设备时控制家用设备,例如操作无线锁设备或订购需要在家庭中补充的商品或家庭中某些设备所需的服务。
7.在工业场所中,例如可能希望工人在接近工业设备时控制工业设备,同样例如操作无线锁设备,或根据需要订购备件。也可能希望检查人员、警卫人员或管理人员在场所巡视期间记录检查点。
8.在展览场所中,例如可能希望参观者在接近其相应的展示地点时取回与不同展览对象有关的信息。
9.在室外风景处,例如可能希望在景观周围漫步的游客在经过不同景点时获得信息或帮助。
10.作为本发明背后的总体发明理解,本技术发明人已经认识到,移动设备可以被用作工具,用于根据移动设备到物理位置的接近度以比现有技术更准确的方式执行一些数字动作。
11.参见图1a
‑
1c,图1a
‑
1c示出了移动设备md的用户u可以如何参与基于接近度导致的活动。在图1a中,移动设备md和用户u与物理位置pl相距距离d0。由于到物理位置pl的距离d0的大小,尚未引起任何活动。
12.如在图1b中的1处所示,用户u将移动设备md移动到更靠近物理位置pl,并且现在处于更短的距离d1。但是,距离d1仍然太远,尚未引起任何活动。
13.只有当用户u将移动设备md移动到更靠近物理位置pl时,即在非常短的距离d2处,
才将引起活动。这在图1c中的2处可见。
14.一个重要的因素是位置精度;通常希望只有当用户u和移动设备md非常接近物理位置pl时才执行活动。这意味着在图1a和图1b所示的情况将不会已经引起活动3,而是仅在用户u和移动设备md确实接近物理位置pl即图1c所示的情况才引起活动3。
15.验证移动设备md是否确实接近物理位置pl可能具有挑战性。一种常见的现有技术方法涉及使用由移动网络运营商和/或基于卫星的全球定位系统提供的位置服务来确定移动设备md的位置。但是,这需要移动设备md具有关于物理位置的地理坐标的先验知识;移动设备的当前位置还得要与物理位置的地理坐标进行比较。它还需要物理位置pl处的位置服务的可用性。如果该位置在室内或在其它受屏蔽的环境中,则可能无法使用位置服务,或者可能会降低其准确性。
16.另一种现有技术方法涉及将无线电发射器放置在物理位置。这允许移动设备通过测量和评估来自无线电发射器的无线电通信的接收信号强度来估计到物理位置的距离。已知这种方法在定位精度方面有缺点;接收信号强度不仅可能随到无线电发射器的距离而变化,而且还可能因在信号环境中的挑战(例如散射、干扰和多径传播)而变化。
17.而且,对于要基于接收信号强度进行距离估计的移动设备,其需要诸如将接收信号强度值转换为距离的阈值或交叉参考值之类的参考。由于移动设备有各种不同的品牌、型号、尺寸和类型,并因此使用各种各样的无线电收发机电路、天线、外壳材料等,因此很难提供统一的阈值或交叉参考值集,为不同的移动设备提供相同、准确的距离估计。
18.因此,现有技术存在问题和不足。本技术发明人已经确定了改进,这将从本文的其余部分和相关附图中清楚地看到。
技术实现要素:
19.因此,本发明的一个目的是解决、消除、减轻、缓和或减少上述问题和缺点中的至少一些。
20.本发明的第一方面是触发基于接近度的数字动作的方法。该方法包括在物理位置处提供基站设备,该基站设备具有无线射频rf收发器和接近传感器。该方法还包括提供具有无线rf收发器的移动设备。该方法进一步包括测量基站设备与移动设备之间rf通信的接收信号强度,以及获得基站设备的接近传感器的检测输出。该方法此外包括评估移动设备接近于基站设备的第一接近度状态,该第一接近度状态基于所测得的接收信号强度。该方法还包括评估移动设备接近于基站设备的第二接近度状态,该第二接近度状态基于基站设备的接近传感器的检测输出的变化,该检测输出的变化表示移动设备紧邻接近传感器。该方法最后包括当通过评估已确认第一和第二接近度状态时,触发基于接近度的数字动作。
21.更具体地,根据本发明的第一方面的方法可能进一步包括:基站设备由接近传感器的检测输出产生接近度指示数据,基站设备通过rf通信将接近度指示数据发送至移动设备,移动设备接收接近度指示数据,以及移动设备通过确定接近度指示数据是否满足预定标准来评估第二接近度状态。
22.在不同的实施例中,接近传感器可以例如但不限于是用于测量入射光的光传感器、电容传感器、多普勒效应传感器、涡流传感器、电感式传感器、磁性传感器、红外传感器、光学光电传感器、光电池传感器、激光测距仪传感器、热传感器、雷达传感器、声纳(声学)传
感器、超声波传感器、霍尔效应传感器、压电传感器、机械开关传感器或机械位移传感器。因此,本文中使用的术语“接近传感器(proximity sensor)”应被解释为非基于无线电的传感器,其能够通过检测受所述出现的对象(例如移动设备)的存在影响的物理特性来检测对象(例如移动设备)紧邻传感器,并相应地提供检测输出,其中物理特性不是接收到的无线电(rf)信号强度。
23.因此,术语“紧邻(immediately close)”应被解释为是指出现的对象(例如移动设备)足够靠近接近传感器,以便引起在物理特性上从空值或当对象(例如移动设备)不存在(即,不紧邻)时的情况的可检测变化或改变。在一些实施例中,这可能对应于出现的对象(例如移动设备)与接近传感器之间的0
‑
10cm的距离,但不限于此。
24.在下文的详细描述、权利要求和附图中描述了本发明的第一方面的特征、优点和实施例。
25.本发明的第二方面是包括控制器和短程无线通信接口的移动计算设备。移动计算设备被设置成用于测量与基站设备rf通信的接收信号强度,以建立接收信号强度值。移动计算设备还被设置成用于基于所测得的接收信号强度来评估移动设备接近于基站设备的第一接近度状态。移动计算设备进一步被设置成用于从基站设备接收接近度指示数据,并且用于基于接收到的接近度指示数据来评估移动设备接近于基站设备的第二接近度状态。第二接近度状态基于基站设备的接近传感器的检测输出的变化,该检测输出的变化表示移动设备紧邻接近传感器。移动计算设备最后被设置成当已经确认第一和第二接近度状态时触发基于接近度的数字动作。
26.根据本发明的第二方面的移动计算设备可以实现在根据本发明第一方面的方法中提到的移动设备。相应的,根据本发明的第二方面的移动计算设备可被设置成执行根据本发明的第一方面以及如贯穿本文所述的方法中为移动设备所限定的功能。
27.本发明的第三方面是包括控制器、短程无线通信接口和接近传感器的基站设备。基站设备被设置成通过rf通信与移动设备通信,从接近传感器的检测输出产生接近度指示数据,并通过rf通信将接近度指示数据发送到移动设备。
28.更具体地,根据本发明的第三方面的基站设备可被设置成从接近传感器的检测输出产生接近度指示数据,使得接近度指示数据将使移动设备能够基于接近传感器的检测输出的变化来评估移动设备是否接近于基站设备,检测输出的变化因此表示移动设备显现紧邻接近传感器。
29.根据本发明的第三方面的基站设备可以实现根据本发明第一方面的方法中提到的基站设备。相应的,根据本发明的第三方面的基站设备可被设置成执行在根据本发明的第一方面以及如贯穿本文所述的方法中为基站设备所限定的功能。
30.本发明的第四方面是通信系统,其包括根据本发明的第二方面的一个或多个移动计算设备和根据本发明的第三方面的基站设备。
31.所公开的实施例的其它方面、目的、特征和优点将从下文的详细披露、所附的权利要求以及附图中显现。一般来说,权利要求书中使用的所有术语都应当按照其在技术领域中的一般含义来解释,除非本文另有明确定义。
32.除非另有明确说明,否则对“一个(a)/一个(an)/所述(the)[元件、设备、部件、手段/装置、步骤等]”的所有引用应公开解释为是指元件、设备、部件、手段/装置、步骤等的至
少一个实例。除非明确说明,否则本文公开的任何方法的步骤不必按照公开的确切顺序执行。
附图说明
[0033]
图1a
‑
1c示出了移动设备的用户可以如何参与基于接近度引起的数字活动。
[0034]
图2a示出了总体上根据本发明的通信系统,该通信系统涉及移动设备和设置在一物理位置的基站设备,移动设备接近基站设备并从基站设备接收rf公告信号。
[0035]
图2b示出了图2a的通信系统,示出了移动设备移动到更靠近基站设备并开始与基站设备进行rf通信。
[0036]
图2c示出了图2a和2b的通信系统,示出了移动设备移动到甚至更靠近基站设备,通过接收到的信号强度评估和在基站设备处使用接近传感器的组合来确认移动设备与基站设备的接近度,并在成功确认接近度后触发数字动作。
[0037]
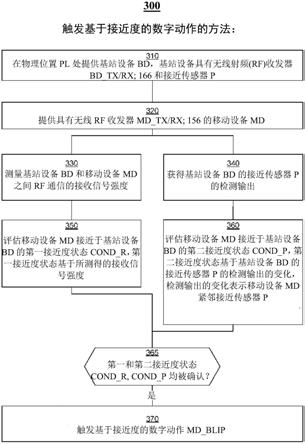
图3是根据本发明的触发基于接近度的数字动作的总体方法的流程图。
[0038]
图4a
‑
4b示出了本发明的实施例。
[0039]
图5a
‑
5e示出了本发明的其它实施例。
[0040]
图6a示出了可实现本文中所述的移动设备的移动计算设备。
[0041]
图6b示出了可实现本文中所述的基站设备的基站设备。
[0042]
图6c
‑
6f示出了图6b中的基站设备的不同示例性实施例。
[0043]
图7是在实施例中触发基于接近度的数字动作的总体方法的流程图,其中接近度传感器是用于测量入射光的光传感器。
[0044]
图8a
‑
8b示出了图7的实施例的细化改进。
[0045]
图9a
‑
9e示出了图7的实施例的进一步细化改进。
具体实施方式
[0046]
下文将结合附图更充分地描述所公开的实施例,附图中示出了本发明的某些实施例。不过,本发明可以以许多不同的形式体现,并且不应被解释为限于本文所述的实施例;相反,这些实施例是作为实例提供的,使得本公开将是透彻和完整的,并且将本发明的范围充分传达给本领域技术人员。贯穿全文,类似的附图标记表示类似的元件。
[0047]
首先参见图2a、图2b和图2c,它们示出了总体上根据本发明的通信系统100。当用户u将移动设备md靠近物理位置pl时,由移动设备md触发基于接近度的数字动作的方法可能在通信系统100中执行。该方法在图3中以流程图示出,并且将在后文更详细地描述。
[0048]
物理位置pl可能例如但不限于是零售场所(例如商店、超市或购物中心)、办公场所、住宅场所(例如私人住宅或旅馆)、工业场所(例如工厂或车间)、展览场所(例如展览会、画廊或博物馆)或室外风景。
[0049]
通信系统100包括移动设备md以及基站设备bd。移动设备md具有无线射频rf收发器md_tx/rx。基站设备bd被设置在物理位置pl处并且具有无线rf收发器bd_tx/rx和接近传感器p。不过,在所公开的实施例中,没有限制,无线rf收发器md_tx/rx和bd_tx/rx与低功耗蓝牙(ble)兼容。
[0050]
基站设备bd被设置成通过无线rf收发器bd_tx/rx发送短程无线公告信号bd_
announce。(其它实施例可以在没有短程无线公告信号的情况下进行操作。)
[0051]
当移动设备md离基站设备bd太远时,例如超出图2a中d1的距离,移动设备md超出范围并且将不会接收到公告信号bd_announce。当它移近时,参见图2a中的附图标记1,即移到比d1短的距离时,它可能接收公告信号bd_announce,并且在一些实施例中,在更靠近基站设备bd的同时开始与基站设备bd进行rf通信,如附图标记1’处所示。这可以在图2b中看到。
[0052]
在图2c中,移动设备md仍然移动更靠近基站设备md,如附图标记2处所示。移动设备md现在如此接近基站设备(并因此接近物理位置pl),以致于希望触发数字动作。根据总的发明构思,移动设备md与基站设备bd的紧密接近通过两件事的组合来确认:接收到的信号强度评估和对基站设备bd处的接近传感器p的检测输出的评估。接近传感器p的目的是当移动设备如此靠近接近传感器p(并因此靠近基站设备bd和物理位置pl)使得与当移动设备不存在(即,不紧邻接近传感器p)时的空值或状况相比,移动设备md的存在将导致物理特性的可检测的变化或改变时,检测由接近传感器p监控、测量或以其它方式感测的物理特性的变化。
[0053]
只有在成功确认接收到的信号强度评估和来自接近传感器p的检测输出评估后,才会触发数字动作md_blip。数字动作md_blip在图2c中的附图标记3处可见,并且通常可能涉及在移动设备md的软件应用程序中和/或经由移动宽带数据网络或类似网络与移动设备md通信的远程服务器资源中调用指令、功能或消息。例如,参见图5b、5c和5e中的宽带通信网络bbcn和远程服务器资源rsr。
[0054]
在图2a
‑
2c中,距离d1和d2当然纯粹是用于示例目的,并且不应对比例赋予任何权重。第一距离d1可能是例如1
‑
50m,或更优选地2
‑
10m,而不受限制并且取决于实际实施的目标和规范。第二距离可能是0
‑
25cm,或更优选地0
‑
10cm,而不受限制并且同样取决于实际实施的目标和规范。
[0055]
从对上文给出的发明功能的简要介绍继续,现在参见图3。图3是根据本发明触发基于接近度的数字动作的总体方法300的流程图。
[0056]
方法300涉及以下内容。
[0057]
如已经在图3中的步骤310处提及和看到的,在物理位置pl处设置基站设备bd。应当指出,基站设备bd具有无线rf收发器bd_tx/rx和接近传感器p。接近传感器p例如可能是用于测量入射光的光传感器、电容传感器、多普勒效应传感器、涡流传感器、电感式传感器、磁性传感器、红外传感器、光学光电传感器、光电池传感器、激光测距仪传感器、热传感器、雷达传感器、声纳(声学)传感器、超声波传感器、霍尔效应传感器、压电传感器、机械开关传感器或机械位移传感器。一些示例性实施例将在本文的后面进行描述,其中接近传感器p分别是用于测量入射光的光传感器l(图6、7a
‑
7b、8a
‑
8e和图9f)、电容传感器(图9c)、电感式传感器(图9d)和机械开关或位移传感器(图9e)。不过,一般而言,可以使用任何接近传感器,所述接近传感器能够在当移动设备md如此靠近接近传感器p(并因此靠近基站设备bd和物理位置pl)使得与移动设备不存在时(即,不紧邻接近传感器p)的空值或状况相比,移动设备md的存在将导致物理特性的可检测的变化或改变时,能够检测由接近传感器p监控、测量或以其它方式感测的物理特性的变化。
[0058]
如在图3中的步骤320处所见,方法300还涉及提供移动设备md。应当指出,移动设
备具有无线rf收发器md_tx/rx。
[0059]
方法300进一步包括测量基站设备bd与移动设备md之间rf通信的接收信号强度(参见步骤330),以及获得基站设备bd的接近传感器p的检测输出(参见步骤340)。
[0060]
方法300接着涉及评估移动设备md接近于基站设备bd的第一接近度状态cond_r(参见步骤350)。如将结合其余附图更详细地描述的,第一接近度状态基于所测得的接收信号强度。
[0061]
方法300还涉及评估移动设备md接近于基站设备bd的第二接近度状态cond_p(参见步骤360)。第二接近度状态基于基站设备bd的接近传感器p的检测输出的变化。因此,检测输出的变化表示移动设备md显现紧邻接近传感器p,这是由于用户u将移动设备md置于例如距接近传感器p 0
‑
10cm的距离内。
[0062]
只有当通过评估350和360确认了第一和第二接近度状态cond_r、cond_p时,参见步骤365,才触发基于接近度的数字动作md_blip,参见步骤370。
[0063]
一方面步骤330和350的顺序,另一方面步骤340和360的顺序,可以并行或以任何相互顺序次序执行。
[0064]
图3中的方法具有相当大的优势。如本文的背景技术部分所述,与纯粹基于接收到的无线电(rf)信号强度的距离估计相比,它在精度上表现出实质性的提高。接近传感器p的提供和创造性使用(即第二接近度状态cond_p)允许对移动设备md与基站设备bd的接近度进行额外的验证,从而显著提高触发基于接近度的数字动作的方法的位置精度。当移动设备md(或另一个对象)紧邻接近传感器p和基站设备bd时,接近传感器p将仅检测由接近传感器p监控、测量或以其它方式感测的物理特性的变化。此外,基于接收到的信号强度(即,第一接近度状态cond_r)的距离估计的并行使用将使得由接近传感器p检测到不是移动设备md或用户u的对象而导致无意触发数字动作md_blip的风险最小化。
[0065]
图3中的方法相对于移动设备md非常接近于基站设备bd的其它可能的组合验证类型也是有利的。例如,一种替代解决方案(不要与本发明相混淆)将明显不如所要求保护的发明,其中移动设备而不是基站设备将被设置有用于组合接近度验证的非基于rf的机制。例如,如果移动设备会配备有用于测量到基站设备的距离的磁性的、基于光的、基于声音的或基于振动的接近传感器,那么这种解决方案将是不利的,原因与本发明背景技术部分中提到的完全相同。移动设备具有各种不同的品牌、型号、尺寸和类型。因此,考虑到所述装置外壳的广泛变化的外壳尺寸、形状和材料,很难为所述磁性的、基于光的、基于声音的或基于振动的接近传感器在移动设备的装置外壳上或内部的位置建立通用标准。另一方面,本发明的基站设备不需要是由各种不同制造商制造的全球分布的消费品,因此可以以一种适用于基站设备的所有情况的单一标准方式(或受控的有限数量的方式)进行设计。
[0066]
方法300和通信系统100的实施例在图4a和图4b中示出。如在步骤410处所见,如前面所描述的,基站设备bd的接近传感器p监控、测量或以其他方式感测可能受移动设备md(或其它对象)紧邻接近传感器p的存在或不存在影响的物理特性。基站设备bd被设置成用于自接近传感器p的检测输出产生接近度指示数据p_data(步骤(415(图4a);步骤416
‑
417(图4b))。基站设备bd被设置成通过rf通信向移动设备md发送接近度指示数据p_data(步骤420)。接近度指示数据p_data可以以rf信号广播,例如以扫描响应消息被范围内的所有设备接收。可替换地,如果在移动设备md和基站设备之间(参见图5a
‑
图5e中的510a和510b)已
经建立了rf连接,例如ble链路,则接近度指示数据p_data可以单独地寻址到移动设备md。
[0067]
移动设备md被设置成用于从基站设备bd接收接近度指示数据p_data。移动设备md进一步被设置成用于通过确定所接收的接近度指示数据p_data是否满足预定标准(步骤430(图4a);步骤431(图4b))来评估第二接近度状态cond_p。
[0068]
移动设备md进一步被设置成用于通过测量与基站设备bd的rf通信的接收信号强度以建立接收到的信号强度值rss_md(步骤440)来评估第一接近度状态cond_r。移动设备md将接收到的信号强度值rss_md与阈值md_thr进行比较(步骤450),并且在接收到的信号强度值rss_md满足阈值md_thr时确认第一接近度状态cond_r(步骤452)。
[0069]
接收到的信号强度可以例如由来自基站设备bd的rf通信中包括的rssi(接收到的信号强度指示符)来确定。rssi可以用dbm表示,并且通常具有负值,范围在0dbm(出色信号)到例如
‑
110dbm(极差信号)之间。一般,基站设备bd与移动设备md之间的距离越短,rssi越高。
[0070]
来自基站设备bd的rf通信可以例如是针对图2a所述的短程无线公告信号bd_announce,或者是由于基站设备bd与移动设备md之间建立rf连接而产生的rf通信(参见图5a
‑
图5e)。
[0071]
如在图4a和图4b中的步骤460和470处所见,移动设备md被设置成用于检查第一和第二接近度状态cond_r、cond_p是否都已被确认,如它们在步骤432和452中设置的逻辑真值所示(最初,在步骤405和407中,已经为第一和第二接近度状态cond_r、cond_p设置了逻辑假值)。
[0072]
当步骤460中的检查结果对于cond_r和cond_p都是肯定的时,进一步设置移动设备md,以在步骤470中触发数字动作md_blip。
[0073]
在图4a的实施例中,由基站设备bd产生的接近度指示数据p_data(步骤415)包括代表接近传感器p的检测输出的值p_value。更具体地说,代表值p_value可以是由接近传感器p监控、测量或以其它方式感测的物理特性的绝对值。在一些实施例中,代表值p_value可以是接近传感器p的检测输出的一系列读数的平均值。
[0074]
可替代地,代表值p_value可以是由接近传感器p监控、测量或以其它方式感测的物理特性的相对值。可以相对于表示空闲状态的参考值来定义相对值,其中接近传感器p不受移动设备md或紧邻接近传感器p的任何其它对象的干扰。同样,代表值p_value由接近传感器p的检测输出得出,有利地由接近传感器p的检测输出的一系列读数的平均值得出。
[0075]
移动设备md被设置成通过比较代表值p_value与阈值pv_thr(步骤430)(视情况而定,其为绝对阈值或相对阈值)来评估第二接近度状态cond_p。
[0076]
在图4a的实施例的改进版本中,基站设备bd被设置成用于重复产生接近度指示数据p_data及其代表值p_value(步骤415),并且用于重复向移动设备md发送包括代表值p_value的接近度指示数据p_data(步骤420)。这可能提高稳定性和可靠性。移动设备md被设置成用于重复接收和评估接近度指示数据p_data(步骤430)。当接收到的接近度指示数据p_data中的代表值p_value在某个时间段内满足阈值pv_thr时,确认第二接近度状态cond_p(步骤432)。
[0077]
在图4b的实施例中,基站设备bd被设置成用于通过评估接近传感器p的检测输出的一个或多个读数以确定与空闲状态的偏差(步骤416)来产生接近度指示数据p_data,其
中接近传感器p不受移动设备md或紧邻接近传感器p的任何其它对象的干扰。当已经确定偏离空闲状态时,基站设备bd被设置成用于在接近度指示数据p_data中设置接近度检测指示符p_det或将其作为接近度指示数据p_data(步骤417),然后将其发送给移动设备md(步骤420)。取决于实施,接近度检测指示符p_det可能作为数据字段被包括在接近度指示数据p_data中,或者它可能构成整个接近度指示数据p_data。
[0078]
移动设备md被设置成用于通过在接收到的接近度指示数据p_data中检测接近度检测指示符p_det(步骤431)来评估第二接近度状态cond_p。当检测到接近度检测指示符p_det时,确认第二接近度状态cond_p(步骤432)。
[0079]
在图4b的实施例的改进版本中,为了提高稳定性和可靠性,基站设备bd被设置成用于重复评估来自接近传感器p的检测输出(步骤416),并且当偏离空闲状态已经持续了一段时间时提供接近度检测指示符p_det(步骤417)。
[0080]
在图5a
‑
5e中示出了进一步的实施例。在图5a中,基站设备bd可发送在范围内时可以由移动设备md接收的rf公告信号bd_announce(步骤500)。rf公告信号bd_announce可以例如是ble广告信号。结果,移动设备md和基站设备bd可以通信(步骤510b,510a)以建立rf连接,例如ble链路。即使未在这些附图中示出,相应的功能也可以包括在图4a和图4b的实施例中。
[0081]
如在步骤520a和520b处所见,移动设备md和基站设备bd进行通信,使得移动设备md可确定接收到的信号强度rss_md。相应地,基站设备bd可以确定接收到的信号强度rss_bd。后者不是强制性的,但是用于所公开的实施例中仍然有益,因为仅当根据来自接近传感器p的检测输出的一个或多个读数检测到变化时(步骤542),它才允许基站设备bd向移动设备md发送接近度指示数据p_data(步骤550)。
[0082]
在图5a
‑
5e所示的实施例中,接近度指示数据p_data因此包含类似于上文针对图4b所述的接近度检测指示符p_det。作为替代,如上文针对图4a所述,图5a
‑
图5e中所示的实施例可以基于代表值p_value。
[0083]
移动设备md被设置成通过检查在步骤520b中确定的接收到的信号强度rss_md是否满足阈值md_thr(步骤530)来评估第一接近度状态cond_r。如果在步骤530中的检查是肯定的,则参见“是(yes)”,执行进行至步骤560。否则,参见“否(no)”,执行返回至步骤520b,以便以某个周期性或方案重新确定接收到的信号强度rss_md。
[0084]
与图4a和4b一样,例如,可以从来自基站设备bd的rf通信中包含的rssi(接收信号强度指示符)确定接收信号强度。
[0085]
移动设备md被设置成通过在所接收的接近度指示数据p_data中检测接近度检测指示符p_det(步骤560)来评估第二接近度状态cond_p。当检测到接近度检测指示符p_det时,确认第二接近度状态cond_p,参见“是”,从而执行进行至步骤570以触发数字动作md_blip。如果未检测到接近度检测指示符p_det,则移动设备md可以被设置成在一定时间段期间继续对其进行监控,该时间段的到期可以导致超时并且执行返回到步骤520b。
[0086]
图5b示出了一个实施例,其中移动设备md被设置成处理这种情况,其中即使接收到的信号强度rss_md没有被确定为满足阈值md_thr(参见步骤530,否),也从基站设备bd接收接近度检测指示符p_det(参见步骤532、533,是)。如果基站设备bd的接近传感器p及时地检测到由于移动设备md紧邻而导致的物理性质的变化,但是阈值md_thr太高而无法注意到
移动设备md与基站设备bd的基于rf的接近度,则可能出现这种情况。
[0087]
因此,移动设备md被设置成在特定时间段内检测已经确认了第二接近度状态cond_p而没有确认第一接近度状态cono_r(步骤532,533)。作为响应,移动设备md被设置成向远程服务器资源rsr发送报告md_thr_too_high(步骤534)。该报告可以通过宽带通信网络bbcn发送。此类报告可由服务提供商或设备制造商用来调谐阈值md_thr以供移动设备的未来实例,或者甚至通过在托管本发明及其实施例中的移动设备md所执行的功能的软件应用的即将更新中包括经调整的阈值md
‑
thr而现有的那些。
[0088]
图5c示出了一个实施例,其中移动设备md被设置成处理相反的情况,其中即使接收信号强度rss_md确实已确定满足阈值md_thr(参见步骤530,是),也没有从基站设备bd接收到接近度检测指示符p_det(参见步骤560、561,超时)。如果阈值md_thr低到足以在步骤530中引起对接收信号强度rss_md的过早反应,即当移动设备md实际上没有(尚未)足够靠近基站设备bd时(例如,远于针对图2b和图2c所解释的距离d2),则可能出现这种情况。
[0089]
因此,移动设备md被设置成在特定时间段内检测已经确认了第一接近度状态cond_r而没有确认第二接近度状态cond_p(步骤560,561)。作为响应,移动设备md被设置成向远程服务器资源rsr发送报告md_thr_too_low(步骤562)。该报告可以通过宽带通信网络bbcn发送。此类报告可由服务提供商或设备制造商用来调谐类似于上文针对图5b所述的阈值md_thr。
[0090]
图5d示出了一个实施例,其中基站设备bd被设置成处理出现在基站设备bd附近的多个移动设备。因此,在图5d中,提供了一个或多个额外的移动设备md2...mdn。每个额外的移动设备md2...mdn具有无线rf收发器,并且被设置成通过rf通信与基站设备bd进行通信520b以确定各自的接收信号强度值。
[0091]
基站设备bd被设置成通过rf通信与每个额外的移动设备md2...mdn进行通信(步骤520a),以确定每个额外的移动设备md2...mdn的各自的接收信号强度值。基站设备bd还被设置成确定移动设备md和额外的移动设备md2...mdn中满足的设备(步骤541),所述满足的设备具有满足阈值bd_thr的接收信号强度值。
[0092]
基站设备bd进一步被设置成基于确定步骤541,通过与满足的设备md,md2,
…
,mdn中的一个或多个md、md2的rf通信,向移动设备md发送接近度指示数据p_data(步骤551)。例如,基站设备bd可被设置成向满足的设备md、md2中的具有最高接收信号强度值的一个单个设备md发送接近度指示数据p_data(步骤551)。这可能是有益的,因为它减少了接近度指示数据p_data被发送到错误的移动设备的风险,例如,客户是柜台或收银机处的第二个排队客户,而正确地是第一个排队客户应该接收接近度指示数据p_data并触发数字动作。
[0093]
可替代地,基站设备bd可以被设置成向各个满足的设备md、md2发送接近度指示数据p_data(步骤551)。在希望支持触发一个以上移动设备的并行数字动作的使用情况下,这可能是有益的。
[0094]
仍然可替代地,基站设备bd可以被设置成向首先由基站设备bd检测到的一个单个移动设备md发送接近度指示数据p_data(步骤551),即,根据先来先服务(fcfs)原则。
[0095]
图5e示出了一个实施例,其中基站设备bd被设置成处理这种情况,其中即使在步骤520a中确定并在步骤541中评估的接收信号强度rss_bd对于至少一个移动设备来说足够高,但基站设备bd没有检测到物理特性的变化(参见步骤542、543,超时)。原因可能是阈值
bd_thr太低,导致rf检测到移动设备,即使移动设备与基站设备bd的距离不足以被接近传感器p检测到。
[0096]
因此,基站设备bd被设置成检测由于接近传感器p未检测到物理特性的变化(步骤542)而导致的超时(步骤543),即使基站设备bd已经确定移动设备md和额外的移动设备md2
…
mdn中的至少一个满足设备(步骤541)。作为结果,基站设备bd被设置成将报告bd_thr_too_low发送到远程服务器资源rsr(步骤544)。信息可以用于调谐基站设备以将阈值bd_thr调整到更高的值。
[0097]
图5a至图5e的实施例的任何或所有组合在本发明中是可以想到的并且是预期的。而且,如本领域技术人员容易实现的,图5a至图5e的任何或所有实施例可以与图4a的实施例或图4b的实施例组合。
[0098]
在本发明的不同实施例中被触发的基于接近度的数字动作md_blip可以例如是登记动作,以在物理位置pl处注册或验证移动设备md的用户u的存在。可替代地,基于接近度的数字动作md_blip例如可以是在用户u用移动设备md执行的数字交易中的肯定动作、或拒绝动作或取消动作,或者是将移动设备md或其用户u与可能正在进行的数字交易相关联的动作。
[0099]
应当指出,本发明可以有利地以但不限于零售场所、办公场所、住宅场所、工业场所、展览场所和室外风景的形式应用于物理位置中或物理位置处。例如,本发明可用于触发对于本文的背景技术部分中提及的任何目的的数字动作,但不限于此。
[0100]
远程服务器资源rsr可以是例如服务器计算机、此类计算机设备的集群或云计算资源或服务。它具有例如一个或多个cpu和/或dsp形式的处理单元,并且通过处理单元执行计算机程序的程序指令被编程以执行本文中描述的功能。宽带通信网络bbcn可以是例如符合例如wcdma、hspa、gsm、utran、umts、lte或lte的移动通信网络,并且宽带数据通信可以是例如tcp/ip流量,可能是加密的或以其它方式保护的。
[0101]
图6a示出了可以实现移动设备md的移动计算设备150。移动计算设备150包括用户界面151,用户界面151通常包括呈现设备和输入设备(可能是组合的)。移动计算设备150还包括存储器152。存储器152可以存储软件应用程序153a,sw托管由本发明及其实施例中的移动设备md执行的功能。存储器152可以进一步存储阈值md_thr。
[0102]
移动计算设备150还包括控制器154、短程无线通信接口156(构成或包括无线rf收发器md_tx/rx)和远程宽带通信接口158。控制器154可以被设置成例如通过执行软件应用程序153a sw的程序指令来执行为在此描述的通信系统100中的移动设备md定义的功能。
[0103]
移动计算设备150可以例如是移动电话、平板计算机、个人数字助理、智能眼镜、智能手表或智能手环。控制器154可以是例如一个或多个微控制器、cpu和/或dsp形式的处理单元,通过执行计算机程序(例如软件应用程序153a sw)的程序指令的处理单元被编程以执行本文中描述的功能。可替代地,控制器154可以被实现为fpga、asic等。
[0104]
图6b示出了可以实现基站设备bd的基站设备160。基站设备160包括以上述接近传感器p形式的接近传感器161。基站设备150还包括存储器162。存储器162可以存储软件程序163a,sw托管由本发明及其实施例中的基站设备bd执行的功能。存储器162可以进一步存储阈值bd_thr。
[0105]
基站设备160还包括控制器164、短程无线通信接口166(构成或包括无线rf收发器
bd_tx/rx)以及可选地远程宽带通信接口168。控制器164可以被设置成例如通过执行软件应用程序163a sw的程序指令来执行为在本文描述的通信系统100中的基站设备bd定义的功能。控制器164可以是例如一个或多个微控制器、cpu和/或dsp形式的处理单元。可替代地,控制器164可以例如被实现为fpga、asic等。
[0106]
图6c示出了一个实施例160
‑
c中的基站设备160。在本实施例中,基站设备160
‑
c包括特定以电容传感器161
‑
c形式的接近传感器。基站设备160
‑
c的其它部件可以与图6b的基站设备160相同。
[0107]
在本实施例中,由接近传感器/电容传感器161
‑
c监控、测量或以其它方式感测的物理特性是电容。在一些实施方式中,来自电容传感器161
‑
c的检测器输出可以采用可以取决于移动设备md(或其它对象)与电容传感器161
‑
c的接近度程度的值。例如,0.0cm的距离(即与电容传感器161
‑
c的传感器表面的实际接触)可以产生与例如0.2cm的距离(即几乎接触但实际上不接触)不同的检测器输出,这又可能不同于当移动设备md(或其它对象)完全不紧邻电容传感器161
‑
c时(即,在超出电容传感器161
‑
c的电容检测范围的某个距离处,因此没有被检测到)的空闲状况下的检测器输出。在其它实施方式中,来自电容传感器161
‑
c的检测器输出可以是“二进制”值,即取第一值表示不存在移动设备md(或其它对象)的空闲状况,以及第二值表示在紧邻电容传感器161
‑
c时检测到移动设备md(或其它对象),确定为超过某个预定的电容阈值。
[0108]
图6d示出了另一实施例160
‑
i中的基站设备160。在本实施例中,基站设备160
‑
i包括特定以电感式传感器161
‑
i形式的接近传感器。基站设备160
‑
1的其它部件可以与图6b的基站设备160相同。
[0109]
在本实施例中,由接近传感器/电感式传感器161
‑
i监控、测量或以其它方式感测的物理特性是电感。在一些实施方式中,来自电感式传感器161
‑
i的检测器输出可能取可以取决于移动设备md(或其它对象)与电感式传感器161
‑
i的接近度程度的值。例如,0.1cm的距离可以产生与例如1.0cm的距离不同的检测器输出,这又可能不同于当移动设备md(或其它对象)完全不紧邻电感式传感器161
‑
i时(即,在超出电感式传感器161
‑
i的电感检测范围的某个距离处,因此没有被检测到)的空闲状态的检测器输出。在其它实施方式中,来自电感式传感器161
‑
i的检测器输出可以是“二进制”值,基本上如上文针对图6c中的实施例所述。
[0110]
图6e示出了又一实施例160
‑
m中的基站设备160。在本实施例中,基站设备160
‑
m包括特定以机械传感器161
‑
m形式的接近传感器。基站设备160
‑
m的其它部件可以与图6b的基站设备160相同。
[0111]
在本实施例中,由接近传感器/机械传感器161
‑
m监控、测量或以其它方式感测的物理特性是电阻。在本实施例的一些实施方式中,机械传感器161
‑
m可以是机械开关传感器,其具有可按压构件,当被用户用移动设备md按压(或轻敲)压抵可按压构件时,该可按压构件被耦合用于电开关的致动。在这样的实施方式中,来自机械传感器161
‑
m的检测器输出将是“二进制”值,在可按压构件未被致动时的空闲状态取第一值,并且当由于移动设备md紧邻机械传感器161
‑
m而被致动时取第二值。
[0112]
在本实施例的其它实施方式中,机械传感器161
‑
m可以是具有可移动构件的机械位移传感器,其中可移动构件的位移程度将改变由接近传感器/机械传感器161
‑
m监控、测
量或以其它方式感测的电阻。这将允许来自机械传感器161
‑
m的检测器输出根据受移动设备md致动的可移动构件的位移程度取值。例如,0.2cm的位移可以产生与例如0.5cm的位移不同的检测器输出,这又可能不同于当移动设备md(或其它对象)完全不紧邻机械传感器161
‑
m并且因此不发生可移动构件的位移时的空闲状态的检测器输出。
[0113]
图6e中的实施例的优点在于,当用移动设备md致动可按压或可移动构件时,具有可按压或可移动构件的机械传感器161
‑
m的设置可以给予用户u以触觉反馈的感觉。
[0114]
图6f示出了又一实施例160
‑
l中的基站设备160。在本实施例中,基站设备160
‑
l包括特定以用于测量入射光的光传感器161
‑
l形式的接近传感器。基站设备160
‑
m的其它部件可以与图6b的基站设备160相同。
[0115]
在本实施例中,由接近传感器/光传感器161
‑
l监控、测量或以其它方式感测的物理特性是光强度。
[0116]
现在参见图7。总体上对应于图3,图7是用于一实施例的触发基于接近度的数字动作的总体方法700的流程图,其中接近传感器p是光传感器l,例如图6f所示的实施例中的基站设备160
‑
l的光传感器161
‑
l。
[0117]
方法700涉及以下内容。
[0118]
如已经在图7中的步骤710处提及并看到的,在物理位置pl处设置基站设备bd。应当指出,基站设备bd具有无线rf收发器bd_tx/rx,并且在本实施例中,具有光传感器l形式的接近传感器。光传感器l可以例如包括光电探测器或光电传感器,例如光电二极管、光敏电阻、光电晶体管或光电导体;有源像素传感器,例如cmos图像传感器;电荷耦合器件(ccd);红外探测器;或者光伏电池。
[0119]
如在图7中的步骤720处所见,方法700还涉及提供移动设备md。应当指出,移动设备具有无线rf收发器md_tx/rx。
[0120]
方法700进一步涉及测量基站设备bd与移动设备md之间的rf通信的接收信号强度(参见步骤730),以及测量基站设备bd的光传感器l的入射光(参见步骤740)。因此,图7中的步骤740执行图3中的获得基站设备bd的接近传感器的检测输出的步骤340。
[0121]
方法700接着涉及评估移动设备md接近于基站设备bd的第一接近度状态cono_r(参见步骤750)。如已经结合前述附图所描述的,第一接近度状态基于所测量的接收rf信号强度。
[0122]
方法700还涉及评估移动设备md接近于基站设备bd的第二接近度状态cond_l(参见步骤760)。第二接近度状态基于由基站设备bd的光传感器l测量的入射光的变化。因此,例如,当用户u将移动设备md非常靠近基站设备bd的光传感器时,例如在0
‑
10cm距离之内,光的变化表示移动设备md遮蔽或干扰光传感器l。因此,图7中的步骤760实施图3中的步骤360,其中第二接近度状态现在被称为cond_l而不是cond_p。
[0123]
仅当通过评估步骤750和760确认了第一和第二接近度状态cond_r、cond_l时(参见步骤765),才会触发基于接近度的数字动作md_blip(参见步骤770)。
[0124]
一方面步骤730和750的顺序,另一方面步骤740和760的顺序,可以并行或以任何相互顺序次序执行。
[0125]
图7中的方法具有相当大的优势。如本文的背景技术部分所述,与纯粹基于接收信号强度的距离估计相比,它在精度上表现了实质性的提高。光传感器l(即,第二接近度状态
cond_l)的设置和创造性使用允许对移动设备md与基本设备bd的接近度进行额外验证,从而显著地提高触发基于接近度的数字动作的方法的位置精度。光传感器l仅在移动设备md(或另一对象)紧邻光传感器l和基站设备bd时检测入射光的变化。此外,基于接收信号强度(即,第一接近度状态cond_r)的距离估计的并行使用将使得由于光传感器l检测到不是移动设备md或用户u的对象而导致无意触发数字动作md_blip的风险最小化。
[0126]
图7中的方法也优于替代解决方案(不要与本发明相混淆),其中移动设备而不是基站设备将被设置有基于非rf的机制用于组合的接近度验证。已经结合上文图3的描述解释了这些有利方面。
[0127]
方法700和通信系统100的实施例在图8a和图8b中示出,图8a和图8b大体上对应于图4a和图4b。如步骤810处所示,基站设备bd的光传感器l如前所述测量入射光。基站设备bd被设置成由光传感器l的一个或多个测量读数产生入射光指示数据l_data(步骤815(图8a);步骤816
‑
817(图8b))。基站设备bd被设置成通过rf通信将入射光指示数据l_data发送到移动设备md(步骤820)。入射光指示数据l_data可以被在范围内的所有设备接收的rf信号中广播,例如以扫描响应消息。可替代地,如果在移动设备md和基站设备之间已经建立了rf连接,例如ble链路(参见图9a
‑
图9e中的步骤910a和910b),则可以将入射光指示数据l_data单独寻址到移动设备md。
[0128]
移动设备md被设置成从基站设备bd接收入射光指示数据l_data。移动设备md进一步被设置成通过确定所接收的入射光指示数据l_data是否满足预定标准(步骤830(图8a);步骤831(图8b))来评估第二接近度状态cond_l。
[0129]
移动设备md进一步被设置成通过测量与基站设备bd的rf通信的接收信号强度以建立接收信号强度值rss_md(步骤840)来评估第一接近度状态cond_r。移动设备md将接收信号强度值rss_md与阈值md_thr进行比较(步骤850),并且当接收信号强度值rss_md满足阈值md_thr时确认第一接近度状态cond_r(步骤852)。
[0130]
接收信号强度可以例如由来自基站设备bd的rf通信中包含的rssi(接收信号强度指示符)来确定。rssi可以用dbm表示,并且通常具有负值,范围在0dbm(出色信号)到例如
‑
110dbm(极差信号)之间。一般,基站设备bd与移动设备md之间的距离越短,rssi越高。
[0131]
来自基站设备bd的rf通信可以例如是针对图2a描述的短程无线公告信号bd_announce,或者是由于基站设备bd与移动设备md之间建立rf连接而产生的rf通信(参见图9a
‑
图9e)。
[0132]
如在图8a和图8b中的步骤860和870处所示,移动设备md被设置成检查第一和第二接近度状态cond_r、cond_l是否已被确认,如在步骤832和852中设置的它们的逻辑真值所表示(最初,在步骤805和807中,已经为第一和第二接近度状态cond_r、cond_l设置了逻辑假值)。
[0133]
移动设备md进一步被设置成当在步骤860中的检查结果对于cond_r和cond_l都是肯定的时,在步骤870触发数字动作md_blip。
[0134]
在图8a的实施例中,由基站设备bd产生815的入射光指示数据l_data包括代表入射光强度的值l_value。更具体地说,代表值l_value可以是从光传感器l的一个或多个测量读数中得出的入射光强度的绝对值。代表值l_value可以是来自光传感器l的一系列测量读数的平均值。
[0135]
可替代地,代表值l_value可以是相对于参考值定义的入射光强度的相对值,该参考值表示光传感器l未被屏蔽或干扰的空闲状态。同样,代表值l_value是从光传感器l的一个或多个测量读数中得出的,有利地是从光传感器l的一系列测量读数的平均值中得出的。
[0136]
移动设备md被设置成通过将代表值l_value与阈值lv_thr进行比较(步骤830)来评估第二接近度状态cond_l,阈值lv_thr视情况而定是绝对阈值或相对阈值。
[0137]
在图8a的实施例的改进版本中,基站设备bd被设置成重复产生代表值l_value及其代表值l_value(步骤815),并且将包括代表值l_value的入射光指示数据l_data重复发送到移动设备md(步骤820)。这可以提高稳定性和可靠性。移动设备md被设置成重复接收和评估入射光指示数据l_data(步骤830)。当所接收的入射光指示数据l_data中的代表值l_value满足阈值lv_thr达某个时间段时,确认第二接近度状态cond_l(步骤832)。
[0138]
在图8b的实施例中,基站设备bd被设置成通过评估来自光传感器l的一个或多个测量读数(步骤816)来产生入射光指示数据l_data,以确定与未遮挡或干扰光传感器l的空闲状态的偏差。当已经确定偏离空闲状态时,基站设备bd被设置成在入射光指示数据l_data中或作为入射光指示数据l_data提供光传感器块指示符l_off(步骤817),然后将其发送到移动设备md(步骤820)。取决于实施方式,光传感器块指示符l_off可以作为数据字段包含在入射光指示数据l_data中,或者可以构成整个入射光指示数据l_data。
[0139]
移动设备md被设置成通过检测接收到的入射光指示数据l_data的光传感器块指示符l_off(步骤831)来评估第二接近度状态cond_l。当检测到光传感器块指示符l_off时,确认第二接近度状态cond_l(步骤832)。
[0140]
在图8b的实施例的改进版本中,为了提高稳定性和可靠性,基站设备bd被设置成当偏离空闲状态达一定时间时,重复评估来自光传感器l的测量读数(步骤816)并提供光传感器块指示符l_off(步骤817)。
[0141]
在图9a
‑
9e中示出了其它实施例。在图9a中,基站设备bd可以发送rf公告信号bd_announce,所述信号可以当移动设备md在范围内时由移动设备md接收(步骤900)。rf公告信号bd_announce可以例如是ble广告信号。结果,移动设备md和基站设备bd可以通信(步骤910b、910a)以建立rf连接,例如ble链路。即使未在这些附图中示出,相应的功能也可以包括在图8a和图8b的实施例中。
[0142]
如在步骤920a和920b处所示,移动设备md和基站设备bd进行通信,使得移动设备md可以确定接收信号强度rss_md。相应地,基站设备bd可以确定接收信号强度rss_bd。后者不是强制性的,但是仍然用于所公开的实施例中是有益的,因为它仅当根据来自光传感器l的一个或多个测量读数检测到光变化时(步骤942),才允许基站设备bd向移动设备md发送入射光指示数据l_data(步骤950)。
[0143]
在图9a
‑
9e所示的实施例中,入射光指示数据l_data因此包含类似于上文针对图8a和8b所述的光传感器块指示符l_off。作为替代,如图9a
‑
图9e所示的实施例可以基于代表值l_value,如上文针对图8a和图8b所述。
[0144]
移动设备md被设置成通过检查在步骤920b中确定的接收信号强度rss_md是否满足阈值md_thr(步骤930)来评估第一接近度状态cond_r。如果在步骤930中的检查是肯定的,请参见“是”,则执行进行至步骤960。否则,参见“否”,执行返回到步骤920b,以一定的周期性或方案重新确定接收信号强度rss_md。
[0145]
与图8a和8b一样,接收信号强度可以例如由来自基站设备bd的rf通信中包含的rssi(接收信号强度指示符)来确定。
[0146]
移动设备md被设置成通过检测接收到的入射光指示数据l_data的光传感器块指示符l_off(步骤960)来评估第二接近度状态cond_l。当检测到光传感器块指示符l_off时,确认第二接近度状态cond_l,参见“是”,并且执行进行至步骤970以触发数字动作md_blip。如果未检测到光传感器块指示符l_off,则移动设备md可以被设置成在一定时间段期间对其进行持续监控,该时间段的到期可能导致超时并且执行返回到步骤920b。
[0147]
图9b示出了一个实施例,其中移动设备md被设置成处理这种情况,其中即使接收信号强度rss_md尚未被确定为满足阈值md_thr(参见步骤930,否),也从基站设备bd接收光传感器块指示符l_off(参见步骤932、933,是)。如果基站设备bd的光传感器l及时地检测到由于移动设备md紧邻而导致的入射光的变化,但是阈值md_thr太高而无法注意到移动设备md对基站设备bd的基于rf的接近度,则可能发生这种情况。
[0148]
因此,移动设备md被设置成在特定时间段内检测到已经确认了第二接近度状态cond_l而没有确认第一接近度状态cond_r(步骤932、933)。作为响应,移动设备md被设置成向远程服务器资源rsr发送报告md_thr_too_high(步骤934)。该报告可以通过宽带通信网络bbcn发送。此类报告可由服务提供商或设备制造商用来调谐阈值md_thr以供移动设备的未来情况,或者甚至是现有的情况,其通过在托管本发明及其实施例中的移动设备md所执行的功能的软件应用的即将更新中包括经调整的阈值md_thr’。
[0149]
图9c示出了一个实施例,其中移动设备md被设置成处理相反的情况,其中即使接收信号强度rss_md已经确实被确定为满足阈值md_thr(参见步骤930,是),也没有从基站设备bd接收到光传感器块指示符l_off(参见步骤960、961,超时)。如果阈值md_thr足够低以致于对步骤930中的接收信号强度rss_md产生过早反应,即,当移动设备md实际上没有(尚未)足够靠近基站设备bd时(例如,比针对图2b和图2c所说明的距离d2更远),则可能出现这种情况。
[0150]
因此,移动设备md被设置成检测在某一时间段内已经确认了第一接近度状态cond_r而没有确认第二接近度状态cond_l(步骤960、961)。作为响应,移动设备md被设置成向远程服务器资源rsr发送报告md_thr_too_low(步骤962)。该报告可以通过宽带通信网络bbcn发送。此类报告可以被服务提供商或设备制造商用来调谐类似于上文针对图9b所述的阈值md_thr。
[0151]
图9d示出了一个实施例,其中基站设备bd被设置成处理接近基站设备bd的多个移动设备。因此,在图9d中,提供了一个或多个额外的移动设备md2...mdn。每个额外的移动设备md2...mdn具有无线rf收发器,并且被设置成通过rf通信与基站设备bd进行通信以确定各自的接收信号强度值(步骤920b)。
[0152]
基站设备bd被设置成与每个额外的移动设备md2...mdn通过rf通信进行通信(步骤920a),以确定每个额外的移动设备md2...mdn的各自的接收信号强度值。基站设备bd还被设置成确定移动设备md和额外的移动设备md2...mdn中的满足设备(步骤941),所述满足设备具有满足阈值bd_thr的接收信号强度值。
[0153]
基站设备bd进一步被设置成根据确定步骤941,通过与满足设备md,md2,
…
,mdn中的一个或多个md、md2 rf通信向移动设备md发送入射光指示数据l_data(步骤951)。例如,
基站设备bd可以被设置成将入射光指示数据l_data发送到满足设备md、md2中具有最高接收信号强度值的一个单个设备md(步骤951)。这可能是有益的,因为它减少了将入射光指示数据l_data被发送到错误的移动设备的风险,例如,客户是柜台或收银台的第二个排队客户,而正确的是第一个排队客户应当接收入射光指示数据l_data并触发数字动作。
[0154]
可替代地,基站设备bd可以被设置成将入射光指示数据l_data发送到每个满足设备md、md2(步骤951)。在希望支持触发由一个以上移动设备并行数字动作的使用情况,这可能是有益的。
[0155]
仍然可替代地,基站设备bd可以被设置成将入射光指示数据l_data发送到首先被基站设备bd检测到的单个一个移动设备md(步骤951),即根据先来先服务(fcfs)原则。
[0156]
图9e示出了一个实施例,其中基站设备bd被设置成处理这种情况,其中基站设备bd没有检测到光变化(参见步骤942、943,超时),即使在步骤920a中确定并在步骤941中评估的接收信号强度rss_bd对于至少一个移动设备来说足够高。原因可能是阈值bd_thr太低,导致检测到移动设备,即使移动设备并不够靠近基站设备bd以便被光传感器l检测到。
[0157]
因此,基站设备bd被设置成检测由光传感器l未检测到光的变化(步骤942)而引起的超时(步骤943),即使基站设备bd已经在移动设备md和额外的移动设备md2
…
mdn中确定了至少一个满足设备(步骤941)。作为结果,基站设备bd被设置成将报告bd_thr_too_low发送到远程服务器资源rsr(步骤944)。该信息可以用于调谐基站设备以将阈值bd_thr调整为更高的值。
[0158]
图9a至图9e的实施例的任何或所有组合是可以想到的并且在本发明中是预期的。而且,如本领域技术人员容易意识到的,图9a至图9e的任何或所有实施例可以与图8a的实施例或图8b的实施例组合。
[0159]
尽管目前蓝牙低功耗(ble)被认为是无线rf收发器bd_tx/rx和md_tx/rx的一种有利的短程无线通信技术,但也可以想到其它技术,包括但不限于近场通信(nfc)、无线射频识别(rfid)、无线lan(wlan,wifi)或其它形式的基于接近度的设备对设备无线电通信信号,例如lte direct。
[0160]
对于确实基于ble的实施例,相信以下ble和基于ble的信标技术的概述有助于理解本发明的一些实施例。
[0161]
苹果公司的ibeacon技术使移动设备可以在微局部范围内了解其位置,并且还可以根据移动设备的当前位置向移动设备的用户传送超文本内容。ibeacon技术基于ble标准,更具体的基于通用访问配置文件(gap)广告包。还有其它几种短程无线信标技术,例如altbeacon、uribeacon和eddystone,它们也基于ble和gap。
[0162]
在基于ble标准的基本的短程无线信标通信系统中,信标发射器设备以31字节的gap ble数据包重复地广播短程无线信标广告信号。信标广告信号包含128位的通用唯一标识符uutd。信标广告信号还可以包括16位的主要部分和16位的次要部分。信标信号识别与信标发射器设备相关联的信标区域。众所周知,地理区域是由围绕地球表面已知点的指定半径的圆所定义的区域,而信标区域则是由移动设备与一个或多个信标发射器设备的接近度所定义的区域。
[0163]
在一些实施方式中,信标区域由信标广告信号中的uutd、主要部分和次要部分表示。在其它实施方式中,信标区域由信标信号中的uuid和主要或次要部分表示。在其它实施
方式中,信标区域仅由uuid表示。
[0164]
为了在信标发射器设备的范围内时能够接收短程无线信标信号,每个移动设备都配备有应用程序app,该应用程序被设置成检测短程无线信标信号并对其做出反应,例如上述信标广告信号,由底层操作系统支持。在一种已知的信标技术中,移动设备中的应用程序app可以通过监控(monitoring)和测距(ranging)两种方式检测信标并对其做出反应。监控使应用程序能够检测到移入和移出信标区域(即,移动设备是否在与信标区域相关联的任何信标发射器设备的范围之内或之外)。因此,监控允许应用程序扫描信标区域。测距更加细化,并提供了范围内的信标发射器设备列表以及它们各自的接收信号强度,可用于估计到它们每个的距离。因此,测距允许应用程序检测到信标区域中的单独信标发射器设备并对其做出反应。
[0165]
这些应用程序可能由移动设备的操作系统以不同的模式处理。最突出的模式是主动模式,在该模式下,应用程序在前台执行,并且通常能够与移动设备的用户进行交互,并且还可以通过短程无线信标接口和/或另一通信接口与外部设备(例如服务器)进行通信。关于短程无线信标通信,测距通常仅在应用程序处于主动模式时才运行。
[0166]
当移动设备接收到信标广告信号时,移动设备中的应用程序可能从信标广告信号中包含的uuid(以及主要/次要内容,视情况而定)检测到它已经进入信标区域,并且以对信标发射器设备的用户和/或主机有益并且通常涉及移动设备中的应用程序与服务提供商之间经由宽带通信网络的交互的某种方式适当地作出反应。系统服务器也可以被包含在一些实施方式中。
[0167]
所述有益用途的实例包括但不限于通过从服务提供商取回信标发射器设备的预定义位置或通过与本地查找数据进行交叉参考或从服务提供商取回内容来确定移动设备的当前大致位置。
[0168]
应用程序处于主动模式的移动设备在本文中称为主动移动设备。主动移动设备可以接收来自信标发射器设备的信标广告信号的额外的传输并对其做出反应;例如,如果与信标发射器设备的主机相关联的内容被更新或改变,则这可能是有用的。
[0169]
此外,主动移动设备可以从附近的其它信标发射器设备接收信标广告信号并对其做出反应,当然,前提条件是它们在相应的信标发射器设备的范围内,或者向其靠近。这与不同的信标发射器设备是否在相同的信标区域(即,在相应的信标广告信号中包含相同的uuid和主要/次要内容)公布还是在不同的信标区域(前提是应用程序被设置成监控此类不同的信标区域)无关。需要注意的是,相同的信标区域(例如,相同的uuid)通常用于由相同的主机托管的不同的信标发射器设备,例如在同一超市、活动场所、快餐店等内。
[0170]
移动设备的操作系统还可以以被动模式处理应用程序。被动模式的目的是省电,这是因为移动设备通常由电池供电,并且因为在连续的充电阶段之间最大化移动设备的操作时间是总的技术抱负。在被动模式,应用程序在后台执行或仅安装在移动设备上。当应用程序处于主动模式以及当应用程序处于被动模式时,监控都运行,而测距可能仅在应用程序处于主动模式时运行,或者仅在应用程序处于被动模式时的有限时间段内运行。
[0171]
主动模式和被动模式之间的转换可以基于用户交互、应用程序或操作系统中的用户首选项设置或应用程序或操作系统中的程序逻辑。
[0172]
应用程序处于被动模式的移动设备在本文中称为被动移动设备。在被动模式,应
用程序通常无法通过用户界面与用户进行交互,也无法与服务器或其它设备进行通信
‑
除以下情况外。就像主动移动设备一样,附近的被动移动设备可监控信标区域,因此如果它在所讨论的信标发射器设备的范围内,则可以接收短程无线信标广告信号。然而,与主动移动设备不同,被动移动设备将不能使用测距功能来估计到信标发射器设备的距离。
[0173]
上文主要结合一些实施例描述了本发明。不过,如同本领域技术人员容易理解的那样,在由所附权利要求书所限定的本发明的范围内,除上文公开的实施方式以外的其它实施例同样是可能的。
[0174]
在下文编号的条款中限定了可替代的发明方面。
[0175]
i.一种触发基于接近度的数字动作的方法(300),包括:在物理位置(pl)处提供基站设备(bd),所述基站设备具有无线射频rf收发器(bd_tx/rx;166)和光传感器(l)(步骤310);提供移动设备(md),所述移动设备具有无线rf收发器(md_tx/rx;156)(步骤320);测量基站设备(bd)和移动设备(md)之间的rf通信的接收信号强度(步骤330);通过基站设备(bd)的光传感器(l)测量入射光(步骤340);评估移动设备(md)接近于基站设备(bd)的第一接近度状态(cond_r),所述第一接近度状态基于所测量的接收信号强度(步骤350);和评估移动设备(md)接近于基站设备(bd)的第二接近度状态(cond_l),所述第二接近度状态基于由基站设备(bd)的光传感器(l)测量的入射光的变化,所述光的变化表示移动设备(md)屏蔽或干扰光传感器(l)(步骤360);和当通过评估(步骤350、360)确认了第一和第二接近度状态(cond_r,cond_l)时(步骤365),触发基于接近度的数字动作(md_blip)(步骤370)。
[0176]
ii.如条款i中所述的方法,进一步包括:基站设备(bd)由基站设备(bd)的光传感器(l)的一个或多个测量读数产生入射光指示数据(l_data)(步骤415;416
‑
417);基站设备(bd)通过rf通信向移动设备(md)发送入射光指示数据(l_data)(步骤420);移动设备(md)接收入射光指示数据(l_data);和移动设备(md)通过确定接收到的入射光指示数据(l_data)是否满足预定标准(步骤430;431)来评估第二接近度状态(cond_l)(步骤360)。
[0177]
iii.如条款ii中所述的方法,其中由基站设备(bd)产生的入射光指示数据(l_data)(步骤415)包括代表入射光强度的值(l_value),所述代表值(l_value)是以下之一:
·
入射光强度的绝对值;和
·
相对于参考值定义的入射光强度的相对值,所述参考值表示未屏蔽或干扰光传感器(l)的空闲状态;和其中移动设备(md)通过将所述代表值(l_value)与阈值(lv_thr)进行比较(步骤430)来评估第二接近度状态(cond_l)(步骤360)。
[0178]
iv.如条款iii中所述的方法,其中:基站设备(bd)重复产生所述代表值(l_value)(步骤415),并将包括所述代表值
(l_value)的入射光指示数据(l data)发送到移动设备(md)(步骤420);和移动设备(md)重复接收并评估入射光指示数据(l_data)(步骤360;430),当接收到的入射光指示数据(l_data)中的所述代表值(l_value)满足所述阈值(lv_thr)达一定时间,第二接近度状态(cond_l)被确认(步骤432)。
[0179]
v.如条款ii中所述的方法,其中基站设备(bd)通过以下方式产生入射光指示数据(l_data)(步骤416
‑
417):评估来自光传感器(l)的所述一个或多个测量读数,以确定与光传感器(l)未被屏蔽或干扰的空闲状态的偏差(步骤416);和当已经确定与空闲状态的偏差时,作为入射光指示数据(l_data)或在入射光指示数据(l_data)中提供光传感器块指示符(l_off)(步骤417)用于发送到移动设备(md)(步骤420);和其中移动设备(md)通过以下方式评估第二接近度状态(cond_l)(步骤360):检测接收到的入射光指示数据(l_data)的光传感器块指示符(l_off)(步骤431),当检测到光传感器块指示符(l_off)时,第二接近度状态(cond_l)被确认(步骤432)。
[0180]
vi.如条款v中所述的方法,其中:基站设备(bd)反复评估来自光传感器(l)的测量读数(步骤416),并且在与空闲状态的偏差已经持续了一定时间段时提供光传感器块指示符(l_off)(步骤417)。
[0181]
vii.如条款ii
‑
vi中任一项所述的方法,其中移动设备(md)通过以下方式评估第一接近度状态(cond_r)(步骤360):测量与基站设备(bd)rf通信的接收信号强度,以建立接收信号强度值(rss_md)(步骤330;440);比较接收信号强度值(rss_md)与阈值(md_thr)(步骤450);和当接收信号强度值(rss_md)满足阈值(md_thr)时,确认第一接近度状态(cond_r)(步骤452)。
[0182]
viii.如前述条款中的任一项所述的方法,进一步包括:在一定时间段内检测到已经确认第二接近度状态(cond_l)而没有确认第一接近度状态(cond_r)(步骤532、533);和向远程服务器资源(rsr)发送报告(md_thr_too_high)(步骤534)。
[0183]
ix.如条款i
‑
vii中的任一项所述的方法,进一步包括:在一定时间段内检测到已经确认第一接近度状态(cond_r)而没有确认第二接近度状态(cond_l)(步骤560、561);和向远程服务器资源(rsr)发送报告(md_thr_too_low)(步骤562)。
[0184]
x.如条款ii
‑
ix中的任一项所述的方法,进一步包括:提供一个或多个额外的移动设备(md2...mdn),每个额外的移动设备都具有无线rf收发器;每个额外的移动设备(md2...mdn)通过rf通信与基站设备(bd)进行通信(步骤520b)来确定各自的接收信号强度值;基站设备(bd)与每个额外的移动设备(md2...mdn)通过rf通信进行通信(步骤520a)来确定每个额外的移动设备(md2...mdn)的各自的接收信号强度值;
基站设备(bd)确定移动设备(md)和额外的移动设备(md2...mdn)中的满足设备,所述满足设备具有超过阈值(bd_thr)的接收信号强度值(步骤541);和基于确定步骤(步骤541),基站设备(bd)通过与满足设备(md,md2,
…
,mdn)中的一个或多个(md,md2)rf通信向移动设备(md)发送入射光指示数据(l_data)(步骤551)。
[0185]
xi.如条款x中所述的方法,其中基站设备(bd)将入射光指示数据(l_data)发送到满足设备(md,md2)中具有最高接收信号强度值的一个单个设备(md)(步骤551)。
[0186]
xii.如条款x中所述的方法,其中基站设备(bd)将入射光指示数据(l_data)发送到每个满足设备(md,md2)(步骤551)。
[0187]
xiii.如条款x
‑
xii中的任一项所述的方法,进一步包括基站设备(bd):检测由于光传感器(l)未检测到光的变化(步骤542)而导致的超时(步骤543),即使基站设备(bd)已经确定移动设备(md)和额外的移动设备(md2...mdn)中的至少一个满足设备(步骤541);和向远程服务器资源(rsr)发送报告(bd_thr_too_low)(步骤544)。
[0188]
xiv.如前述任一条款所述的方法,其中物理位置(pl)在以下位置之一中或之一处:零售场所,办公场所,住宅场所,工业场所,展览场地,和室外风景。
[0189]
xv.如前述任一条款所述的方法,其中基于接近度的数字动作(md_blip)是以下之一:注册或验证在物理位置(pl)处移动设备(md)的用户(u)的存在的登记动作;由用户(u)用移动设备(md)执行的数字交易中的确认动作;由用户(u)用移动设备(md)执行的数字交易中的拒绝动作;由用户(u)用移动设备(md)执行的数字交易中的取消动作;和将移动设备(md)或其用户(u)与数字交易相关联的动作。
[0190]
xvi.一种移动计算设备(150;md),包括:控制器(154);和短程无线通信接口(156;md_tx/rx),其中移动计算设备(md)被设置成用于:测量与基站设备(bd)rf通信的接收信号强度(步骤330;440),以建立接收信号强度值(rss_md);基于所测量的接收信号强度(rss_md),评估移动设备(md)接近于基站设备(bd)的第一接近度状态(cond_r)(步骤350);从基站设备(bd)接收入射光指示数据(l_data);和基于接收到的入射光指示数据(l_data),评估移动设备(md)接近于基站设备(bd)的第二接近度状态(cond_l)(步骤360),所述第二接近度状态基于由基站设备(bd)的光传
感器(l)测量的入射光的变化,并表示移动设备(md)屏蔽或干扰光传感器(l);和当第一和第二接近度状态(cond_r,cond_l)都已被确认(步骤365;460)时,触发基于接近度的数字动作(md_blip)(步骤370:470)。
[0191]
xvii.如条款xvi中所述的移动计算设备(md;150),被设置成执行在根据条款i
‑
xv中的任一项的方法中为移动设备(md)定义的功能。
[0192]
xviii.一种基站设备(160;bd),包括:控制器(164);短程无线通信接口(166;bd_tx/rx);和光传感器(l),其中基站设备(bd)被设置成用于:通过rf通信与移动设备(md)进行通信(步骤500;510a
‑
b);由光传感器(l)的一个或多个测量读数产生入射光指示数据(l_data)(步骤415;416
‑
417);和通过rf通信向移动设备(md)发送入射光指示数据(l_data)(步骤420)。
[0193]
xix.如条款xviii中所述的基站设备(160;bd),被设置成执行在根据条款i
‑
xv中的任一项的方法中为基站设备(bd)定义的功能。
[0194]
xx.一种通信系统(100),包括:如条款xvi或xvii中所述的一个或多个移动计算设备(150;md);和如条款xviii或xix中所述的基站设备(160;bd)。
[0195]
xxi.一种触发基于接近度的数字动作的方法(300),包括:在物理位置(pl)处提供基站设备(bd)(步骤310),所述基站设备具有无线射频rf收发器(bd_tx/rx;166)和接近传感器(p);提供移动设备(md)(步骤320),所述移动设备具有无线rf收发器(md_tx/rx;156);测量基站设备(bd)和移动设备(md)之间rf通信的接收信号强度(步骤330);获得基站设备(bd)的接近传感器(p)的检测输出(步骤340);评估移动设备(md)接近于基站设备(bd)的第一接近度状态(cond_r)(步骤350),所述第一接近度状态基于所测量的接收信号强度;和评估移动设备(md)接近于基站设备(bd)的第二接近度状态(cond_p)(步骤360),所述第二接近度状态基于基站设备(bd)的接近传感器(p)的检测输出的变化,所述检测输出的变化表示移动设备(md)紧邻接近传感器(p);和当通过评估(步骤350,360)确认了第一和第二接近度状态(cond_r,cond_p)时(步骤365),触发基于接近度的数字动作(md_blip)(步骤370)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1