图像增强型防水云台图像采集系统与方法与流程
[0001]
本发明属于信息化领域,涉及图像增强型防水云台图像采集系统与方法。
背景技术:
[0002]
混凝沉淀工艺是水处理过程中一个十分重要的环节,反应效果的好坏直接关系到出水水质和处理成本。混凝沉淀工艺是指向水中投加适量的混凝剂和絮凝剂,使水中胶体颗粒及细微悬浮物团聚,形成絮凝体——矾花,并使之从水中分离的过程。
[0003]
然而,现有的矾花采集识别系统所拍摄的矾花经常受到外界光源的干扰,导致矾花图像不清晰,难以起到有效提取矾花图像特征并以此精确指导加药的作用。特别是在天气晴好或多云的白天,矾花图像采集装置所摄图像经常出现过度曝光或曝光不均的现象,导致矾花图像特征数据质量严重下降。
技术实现要素:
[0004]
有鉴于此,本发明的目的在于提供一种图像增强型防水云台图像采集系统与方法。用于解决现有技术中矾花采集识别过程中,所摄矾花图像易受外界光源干扰导致过度曝光或曝光不均的现象。
[0005]
为达到上述目的,本发明提供如下技术方案:
[0006]
图像增强型防水云台图像采集系统,该系统包括:云台模块、图像采集模块、图像分析模块、光感应模块、供电模块与具有透明窗口的防护装置;
[0007]
图像采集模块、图像分析模块与光感应模块密封安装于所述防护装置内;
[0008]
图像采集模块透过透明窗口采集矾花图像;
[0009]
供电模块分别连接至图像采集模块、图像分析模块和光感应模块;
[0010]
云台模块与防护装置通过转动轴连接;
[0011]
云台模块通过三轴旋转获取水下拍摄的最佳角度和位置;
[0012]
图像分析模块与图像采集模块连接,用于处理矾花图像,并提取矾花图像信息熵;
[0013]
通过遍历图像采集模块里的补光灯控制参数获取其对应的图像信息熵,确定最大图像信息熵及其对应的补光灯推荐控制参数;当外界光线发生变化,光感应模块将反馈给控制模块并重新遍历图像采集模块里的补光灯控制参数并确定新的补光灯推荐控制参数;
[0014]
所述云台模块包括:云台底座、第一转轴、云台、凹槽、第二转轴、第一连接杆、第三转轴、透明窗口、补光灯、图像采集模块、供电模块、图像分析模块、保护装置、光感应模块、补光灯单元、长杆和第二连接杆;
[0015]
云台底座通过第一转轴在水平方向上转动连接云台,转动角度为360度,凹槽位于云台内部,为转轴的转动提供空间;
[0016]
所述第二转轴在竖直方向上转动连接所述第一连接杆,最大转动角度为310度,第一连接杆通过第三转轴在竖直方向上转动连接防护装置,转动角度为360度;
[0017]
所述转动轴共三条,分别为第一转轴、第二转轴和第三转轴,相互垂直;
[0018]
所述补光灯、图像采集模块、供电模块、图像分析模块、透明窗口以及光感应模块密封安装于防护装置内,长杆与第二连接杆焊接,第二连接杆与云台底座连接;
[0019]
所述供电模块为锂电池或线缆方式实现供电;
[0020]
所述图像采集模块通过透明窗口采集矾花图像;
[0021]
所述图像分析模块连接图像采集模块,用于处理所述矾花图像,并提取所述矾花图像信息熵;
[0022]
所述补光灯均匀划分为若干等份补光灯单元,若干等份不少于6等份,能够分别单独控制;
[0023]
所述补光灯由排列组合计算补光灯单元开启或关闭的组合总数。
[0024]
可选的,当所述若干等份为六等份,补光灯单元开启或关闭的组合总数为1+6+6*5/2+6*5*4/(3*2)+6*5/2+6+1=64种。
[0025]
可选的,所述图像分析模块,包括:
[0026]
图像识别子模块,用于对所述水下图像进行识别,以获取所述水下图像的信息熵;
[0027]
智能算法子模块,与控制模块信号连接,用于遍历所有补光灯控制参数,基于每种补光灯控制参数下的所述图像信息熵获得最大图像信息熵;根据最大图像信息熵生成补光灯推荐控制参数。
[0028]
可选的,所述图像采集模块包含补光灯,补光灯为环线led灯,均匀划分为不少于6等分的补光灯单元,以实现独立控制。
[0029]
可选的,所述控制模块根据图像分析模块反馈的所述补光灯控制参数对补光灯单元进行控制。
[0030]
可选的,当外界光线发生变化时,所述光感应模块将反馈给控制模块,控制模块控制补光灯单元,同时,控制模块将遍历所述补光灯中led灯的亮度层级,亮度层级分为若干档,由低到高,不少于5个档位;在每一个亮度档位下,控制模块遍历补光灯中补光灯单元的不同开关组合及其对应图像信息熵,确定最大图像信息熵及其对应所述补光灯推荐控制参数,并反馈给所述控制模块,控制模块将补光灯调至所述补光灯推荐控制参数。
[0031]
可选的,所述云台模块中的工业相机镜头为定焦镜头,工业相机的像素大于或等于200 万,帧率为60帧/秒;
[0032]
可选的,所述云台模块为机械转动,而非自动化控制,用于增强图像增强型防水云台图像采集系统的水下防水性能。
[0033]
可选的,所述图像分析模块还包括通信单元,所述通信单元连接后台服务器。
[0034]
通信单元上传至后台服务器,直接在前端采集矾花图像并在外界光线变化时触发曝光调节机制,寻找最佳补光灯控制参数,向后台服务器输出参考数据。
[0035]
基于所述系统的图像增强型防水云台图像采集方法,包括以下步骤:
[0036]
s31:根据现场情况,确定一个三轴旋转角度,并将所述图像增强型防水云台图像采集系统放置于水下合适深度;
[0037]
s32:遍历所有所述补光灯控制参数,并获取相应图像信息熵,确定最大图像信息熵及其对应补光灯推荐控制参数;
[0038]
s33:根据补光灯推荐控制参数对补光灯单元进行控制;
[0039]
s34:当外界光线发生变化,光感应模块将信号传递给控制模块,遍历所有所述补
光灯控制参数,并获取相应图像信息熵,确定最大图像信息熵及其对应补光灯推荐控制参数;
[0040]
s35:根据补光灯推荐控制参数对补光灯单元进行控制。
[0041]
本发明的有益效果在于:将光感应模块、图像采集模块与图像分析模块集成在防护装置内,可以通过三轴旋转确定最佳拍摄视角,通过补光灯单元的开关组合、led灯的亮度档位以及图像分析模块的最优化分析获得最佳曝光效果,避免了矾花图像过度曝光或曝光不均的现象,能够最大限度的还原水下矾花当前状态,便于后续加药调整。
[0042]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
[0043]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
[0044]
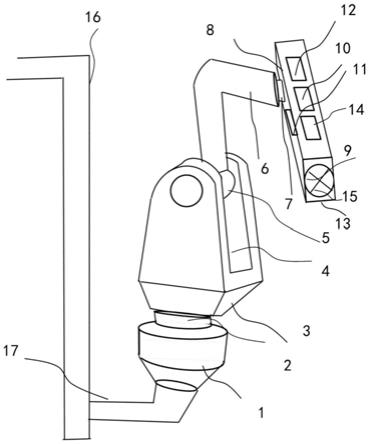
图1为本发明实施例提供的图像增强型防水云台图像采集系统结构示意图;
[0045]
图2为本发明实施例提供的图像增强型防水云台图像采集系统与方法的逻辑关系图。图3为本发明流程图。
[0046]
附图标记:1-云台底座;2-第一转轴;3-云台;4-凹槽;5-第二转轴;6-第一连接杆;7
-ꢀ
第三转轴;8-透明窗口;9-补光灯;10-图像采集模块;11-供电模块;12-图像分析模块;13
-ꢀ
保护装置;14-光感应模块;15-补光灯单元;16-长杆;17-第二连接杆。
具体实施方式
[0047]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0048]
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0049]
本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术
人员而言,可以根据具体情况理解上述术语的具体含义。
[0050]
请参阅图1,为本发明实施例提供的图像增强型防水云台图像采集系统结构示意图,包括:
[0051]
所述云台底座1通过第一转轴2在水平方向上转动连接所述云台3,转动角度可达 360度,所述凹槽4位于所述云台3内部,为转轴的转动提供空间,所述第二转轴5在竖直方向上转动连接所述第一连接杆6,最大转动角度可达310度左右,第一连接杆6 通过第三转轴7在竖直方向上转动连接所述防护装置8,转动角度可达360度。所述转动的轴共三条,分别为第一转轴3,第二转轴5,第三转轴7,其相互垂直。
[0052]
所述补光灯9、所述图像采集模块10、供电模块11、图像分析模块12、透明窗口 13以及光感应模块14密封安装于所述防护装置8内,长杆16与第二连接杆17焊接,第二连接杆17与云台底座1连接。所述供电模块11为锂电池或线缆方式实现供电,所述图像采集模块10通过透明窗口13采集矾花图像;所述图像分析模块12,其连接所述图像采集模块10,用于处理所述矾花图像,并提取所述矾花图像信息熵。所述补光灯9 均匀划分为若干等份补光灯单元15,若干等份不少于6等份,可以分别单独控制。由此,所述补光灯9可由排列组合计算补光灯单元15开启或关闭的组合总数。比如,当若干等份为6等份,其补光灯单元15开启或关闭的组合总数为1+6+6*5/2+6*5*4/(3*2)+ 6*5/2+6+1=64种。led灯的亮度层级可分为若干档,由低到高,不少于5个档位。由此,所述补光灯9的所有控制参数为led灯的亮度层级总数与补光灯单元15开启或关闭的组合总数的乘积。
[0053]
在此,通过工业摄像头等图像采集装置对需要进行智能加药处理的区域,例如工厂废水处理区域等场景进行图像采集,获取对应的实时图像信息(矾花图像)。
[0054]
在本实施例中,图像分析模块12需要对水池中的图像进行实时分析,输入图像为水下工业相机采集到的视频图像。将从视频流读出来的原图,计算出图像信息熵,该数据可以作为水下矾花图像质量的直观表现。
[0055]
在本实施例中,熵值即图像熵,即一幅图像的信息熵,信息熵简单来说就是把信息进行了量化。通过熵的大小表示信息的混乱程度。一般情况下,图像中包涵的信息量多,熵值越大。计算公式为:
[0056][0057]
其中,p
i
为图像中灰度值为i的像素所占的比例,由灰度直方图获得;h为灰度图像的一元灰度熵。
[0058]
在本实施例中,当补光灯单元为6等份,led灯的亮度层级为5个档位,则所有控制参数情况可对应320个图像信息熵数值,其最大值对应的控制参数就是图像信息最丰富,矾花还原度最高的情况。
[0059]
在本实施例中,所述补光灯9、所述图像采集模块10、所述供电模块11、所述图像分析模块12、所述透明窗口13以及所述光感应模块14安装在密封的防护装置8内,该防护装置的材料优选为复合材料,例如,不锈钢,使得密封后的防护等级大于或等于ip67,其中,图像采集模块10可采用定焦镜头工业相机,且工业相机的像素大于或等于200万,帧率为60帧/秒,保证了图像的清晰度与拍摄效率。防护装置8上设有透明窗口13,透明窗口13设置在防
护装置8的前端,图像采集模块10透过透明窗口13采集矾花图像,并通过补光灯9提供用于外部图像照明的光源,通过设置调节补光灯9里若干补光灯单元15的开关及其亮度,对受外界光源干扰的矾花图像进行精准曝光,使得信息熵最大化,以此适应图像采集所属环境的影响,避免受到环境亮度的干扰。在此,图像分析模块12 还包括通信单元,所述通信单元连接后台服务器,需要说明的是,通信单元(有线传输,例如同轴线缆或光缆;或无线通信模块,例如5g模块)上传至后台服务器,直接在前端采集矾花图像并在外界光线变化时触发曝光调节机制,寻找最佳补光灯控制参数,向后台服务器输出参考数据即可。
[0060]
在一实施例中,补光灯9设置在防护装置8的内部,安装在防护装置8内部的补光灯9为led环形补光灯,采用环形补光灯,既能保证均匀照明,又能避免影响图像采集器采集图像。补光灯功率为12w及以上,具备档位调节功能。
[0061]
综上所述,本发明通过将光感应模块、供电模块、图像采集模块与图像分析模块集成在防护装置内,能够更好的还原水下矾花最真实的状态,对于图像曝光不均的问题,可以通过三轴旋转找到最佳拍摄角度,并通过图像分析模块的计算分析功能自动控制若干补光灯单元的开关与亮度,实现图像信息熵的最大化,便于后续加药调整。
[0062]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
[0063]
如图2所示,一种图像增强型防水云台图像采集系统与方法的逻辑关系图,包括:
[0064]
图像采集模块10,用于获取水下图像;
[0065]
图像分析模块12,用于根据所述水下图像生成图像信息熵,根据所述图像信息熵生成补光灯推荐控制参数;
[0066]
控制模块,根据图像分析模块反馈的补光灯控制参数对补光灯单元进行控制,并调动图像分析模块12进行分析计算;接受图像分析模块12基于最大信息熵给出的相应补光灯推荐控制参数;
[0067]
光感应模块14,用于获取外界光线变化情况,当外界光线变化幅度超过设定幅度时,反馈给控制模块;
[0068]
本发明将图像识别技术应用于混凝工艺分析,实现了对矾花图像的智能化曝光。
[0069]
在一实施例中,所述控制模块为plc控制模块,通过socket协议或opc协议与所述分析模块进行数据交互。
[0070]
在一实施例中,所述分析模块包括:
[0071]
图像识别子模块,用于对所述水下图像进行识别,以获取所述水下图像的信息熵;
[0072]
智能算法子模块,与控制模块交互,用于遍历所有补光灯控制参数,基于所有补光灯控制参数下的图像信息熵获得最大图像信息熵;根据所述最大图像信息熵生成所述补光灯推荐控制参数。
[0073]
补光灯控制参数信号传输至所述plc控制模块。
[0074]
在一实施例中,所述分析模块还可以是一服务器,服务器嵌入有智能控制算法。其中服务器可远程部署于中央控制室。
[0075]
本发明将图像识别技术应用于混凝工艺中的矾花采集分析,利用灵活的补光方式
以及智能算法构建了智能曝光模型,实现了对采集图像的增强优化,最大限度提高了图像内容质量与信息熵。针对不同水质情况,模型可自动给出补光灯推荐控制参数。应用所述图像增强型防水云台图像采集系统,在保证稳定采集水下矾花图像的同时,可以提高采集图像的质量,最大限度的还原水下矾花实际生成效果,对后续的药剂投加推荐打下坚实基础。所述图像增强型防水云台图像采集系统,可以实时适应水质波动情况,减少人工对图像采集的干预,最大限度的减少人为视觉偏差导致的图像质量下降,降低劳动强度和成本,降低系统运行成本。
[0076]
如图3,一种所述图像增强型防水云台图像采集系统与方法,包括:
[0077]
s31根据现场情况,确定一个三轴旋转角度,并将所述图像增强型防水云台图像采集系统放置于水下合适深度,以上参数应在尽量保持不变,以期采集图像可以更好的纵向对比;
[0078]
s32遍历所有所述补光灯控制参数,并获取相应图像信息熵,确定最大图像信息熵及其对应补光灯推荐控制参数;
[0079]
s33根据所述补光灯推荐控制参数对补光灯单元进行控制。
[0080]
s34当外界光线发生变化,光感应模块将信号传递给控制模块,遍历所有所述补光灯控制参数,并获取相应图像信息熵,确定最大图像信息熵及其对应补光灯推荐控制参数;
[0081]
s35根据所述补光灯推荐控制参数对补光灯单元进行控制。
[0082]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1