执行运输、信号中转及远程任务的无人机控制系统和方法与流程
[0001]
本发明涉及无人机控制技术领域,更具体地说,涉及一种执行运输、信号中转及远程任务的无人机控制系统和方法。
背景技术:
[0002]
无人机全称“无人驾驶飞行器”,(unmanned aerial vehicle)英文缩写为“uav”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。它涉及传感器技术、通信技术、信息处理技术、智能控制技术以及航空动力推进技术等,是信息时代高技术含量的产物。无人机价值在于形成空中平台,结合其他部件扩展应用,替代人类完成空中作业。进入21世纪,随着轻型复合材料的广泛应用,卫星定位系统的成熟,电子与无线电控制技术的改进,尤其是多旋翼无人机结构的出现,整个无人机行业进入快速发展阶段。
[0003]
无人机是未来航空发展趋势之一,当前在航空机体材料、飞行定位、航空控制领域有所突破。随着技术成熟,零配件成本降低,以多旋翼无人机为主小型民用无人机将成为市场热点。由于航程短、航速慢等特点,多旋翼无人机在安全级别低、稳定性要求低、在无滞空时间特殊要求的领域,有较大的应用空间,特别是利用飞行特质的航空拍摄,空中巡检、航空表演等领域。而随着无人机研发技术逐渐成熟,制造成本大幅降低,无人机在各个领域得到了广泛应用,除军事用途外,还包括农业植保、电力巡检、警用执法、地质勘探、环境监测、森林防火以及影视航拍等民用领域,且其适用领域还在迅速拓展。目前无人机技术仍存在着许多技术问题,如续航:市面上的无人机主要采用锂聚合物电池作为主要动力,续航能力一般在20分钟至30分钟之间;通信系统:公共无线电通信链路,抗干扰能力弱,尤其是同频干扰无法避免。随着无人机的数量指数级增长,无人机通信系统干扰的问题,将日渐突出;航程问题:受到遥控装置的有效距离、遮挡物对无线控制信号传输的影响,导致民用无人机航程短等问题。
技术实现要素:
[0004]
本发明的目的是针对现有技术中存在的不足,提供一种集运输、信号中转及超远程任务执行的无人机控制系统及方法,适用于增加控制装置的有效距离,减弱遮挡物对无线信号传输的影响。
[0005]
本发明解决其技术问题所采用的技术方案是:构造一种执行运输、信号中转及远程任务的无人机控制系统,包括:依序连接的控制中心、移动基站和作业无人机;三者之间以无线通信的方式进行信息交互;其中,所述控制中心包括信号接收系统、显示屏和控制平台;信号接收系统用于接收和处理移动基站传输回来的信号;显示屏连接信号接收系统,用于将接收的信号显示在屏幕上;控制平台用于控制移动基站,以使其操控作业无人机进行作业,在控制作业无人机采集数据的同时,控制移动基站进行移动和作业;
所述移动基站包括运输舱、信号中转装置和大型无人机;所述运输舱用于容置、回收及释放作业无人机;所述信号中转装置用于在释放作业无人机后,与释放的作业无人机建立信号交互,并通过无线通信方式连接至所述控制中心,以向控制中心转发释放的作业无人机传输的信号;大型无人机用于承载所述运输舱和信号中转装置;所述运输舱中装载多个所述作业无人机,每一所述作业无人机上设置摄像头和、或传感器,用于进行图像采集和、或气候监测;每一所述作业无人机上设置与移动基站进行通信的信号收发装置。
[0006]
其中,摄像头包括红外摄像头、数字摄像头、高清摄像头中的一种或几种,在执行任务过程中,根据任务类别任意切换摄像头类型,完成作业。
[0007]
其中,传感器包括co化物传感器、pm2.5传感器、甲烷传感器与气压传感器中的一种或几种,根据任务随意切换传感器类型,完成数据采集任务。
[0008]
其中,作业无人机还包括激光发射装置,用于在作业无人机返航时对移动基站上的运输舱进行位置校准,保证作业无人机准确降落在运输舱内。
[0009]
此外,本发明提供了一种执行运输、信号中转及远程任务的无人机控制方法,采用如前述技术方案所述的执行运输、信号中转及远程任务的无人机控制系统进行控制,包括:在启动移动基站前,将作业无人机与移动基站的信号中转装置进行信号对接,并通过控制中心控制运转阀门打开运输舱,将作业无人机放入移动基站的运输舱中并关闭阀门;启动移动基站,通过控制中心的控制平台,发出指令,将移动基站指挥飞行到指定位置,并寻找有利于信号中转的地点进行降落;移动基站接收到控制中心的控制平台发出的指令,通过阀门运转,将运输舱打开,控制平台通过移动基站的信号中转装置来控制运输舱内的作业无人机起飞;控制平台发出指令,通过信号中转,在控制作业无人机起飞后,控制运输舱的阀门运转,将移动基站的运输舱关闭;控制平台发出指令,通过移动基站的信号中转装置,控制作业无人机按照预设规则执行任务,通过自由转换摄像头和传感器,进行数据采集,并将采集好的数据传输至移动基站的信号中转装置,经中转后传输至控制中心的信号接收系统,将信号传至显示屏,将数据显示并做出处理;作业无人机的任务完成后,将作业无人机回收至移动基站的运输舱;控制中心根据信号中转装置中转的信号,控制作业无人机降落在运输舱,控制中心发出指令,运转阀门,控制运输舱关闭;控制中心发出指令,控制移动基站飞回控制中心或指定地点。
[0010]
其中,在将作业无人机回收至移动基站的运输舱的步骤中,包括步骤:移动基站将坐标信息发送给作业无人机,作业无人机根据坐标信息进行返航;作业无人机返航至移动基站时,发送到达指令至移动基站,打开运输舱,运输舱展开为一个停机坪,移动基站发射返回就绪的信号至作业无人机,作业无人机飞行至停机坪上方;作业无人机发射激光照射在停机坪上,进行位置校准,直至位置对应成功;移动基站将对应成功的信号发射至作业无人机,作业无人机接收信号后垂直降落在停机坪上,并发送降落成功的信号至移动基站;移动基站接收降落成功的信号,控制闭合运输舱。
[0011]
区别于现有技术,本发明的执行运输、信号中转及远程任务的无人机控制系统和方法,针对现有民用电动无人机信号传输距离短、航程有限的问题,通过控制中心控制移动基站运输作业无人机至移动基站的有效信号边界,控制中心控制机舱阀门打开,作业无人机由控制中心控制飞出机舱。之后关闭舱门,控制信号经移动基站的信号中转装置对作业无人机进行控制,操控作业无人机进行数据采集及作业,任务完成后,作业无人机根据定位飞回至移动基站附近,由控制人员通过视频控制飞回机舱,最后操控移动基站返航,间接增加了无人机的有效飞行距离。
附图说明
[0012]
图1是本发明提供的一种执行运输、信号中转及远程任务的无人机控制系统的结构示意图。
[0013]
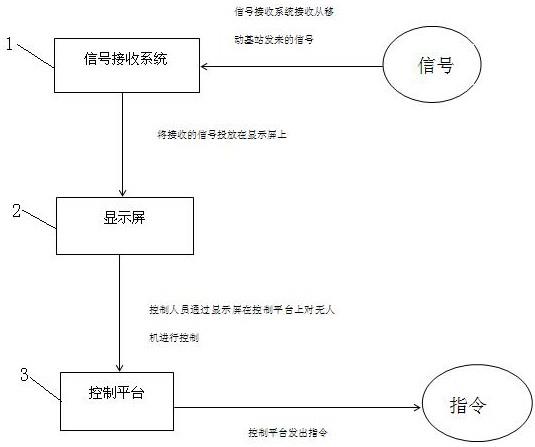
图2是本发明提供的一种执行运输、信号中转及远程任务的无人机控制系统中控制中心的组成示意图。
[0014]
图3是本发明提供的一种执行运输、信号中转及远程任务的无人机控制系统中移动基站的组成示意图。
[0015]
图4是本发明提供的一种执行运输、信号中转及远程任务的无人机控制系统中作业无人机的组成示意图。
[0016]
图5是本发明提供的一种执行运输、信号中转及远程任务的无人机控制系统中移动基站的结构示意图。
[0017]
图6是本发明提供的一种执行运输、信号中转及远程任务的无人机控制系统中运输舱展开为停机坪的示意图。
具体实施方式
[0018]
下面通过实施例来进一步说明本发明,但不局限于以下实施例。
[0019]
参阅图1,本发明提供了一种执行运输、信号中转及远程任务的无人机控制系统,包括:依序连接的控制中心a、移动基站b和作业无人机c;三者之间以无线通信的方式进行信息交互;如图2所示,控制中心a包括信号接收系统1、显示屏2和控制平台3;信号接收系统1用于接收和处理移动基站传输回来的信号;显示屏2连接信号接收系统1,用于将接收的信号显示在屏幕上;控制平台3用于控制移动基站,以使其操控作业无人机进行作业,在控制作业无人机采集数据的同时,控制移动基站进行移动和作业;如图3所示,移动基站b包括运输舱4、信号中转装置5和大型无人机8;运输舱用于容置、回收及释放作业无人机;信号中转装置5用于在释放作业无人机c后,与释放的作业无人机c建立信号交互,并通过无线通信方式连接至控制中心a,以向控制中心a转发释放的作业无人机c传输的信号;大型无人机8用于承载运输舱4和信号中转装置5;图5所示为移动基站b的结构示意图,如图5中,将运输舱4和信号中转装置5固定于大型无人机8上,通过控制大型无人机8的移动,从而实现将移动基站b移动至指定位置。
[0020]
运输舱4中装载多个作业无人机c,如图4所示,每一作业无人机c上设置摄像头10
和、或传感器12,用于进行图像采集和、或气候监测;每一作业无人机c上设置与移动基站b进行通信的信号收发装置11。
[0021]
其中,摄像头10包括红外摄像头、数字摄像头、高清摄像头中的一种或几种,在执行任务过程中,根据任务类别任意切换摄像头类型,完成作业。
[0022]
其中,传感器12包括co化物传感器、pm2.5传感器、甲烷传感器与气压传感器中的一种或几种,根据任务随意切换传感器类型,完成数据采集任务。
[0023]
其中,作业无人机c还包括激光发射装置14,用于在作业无人机c返航时对移动基站b上的运输舱4进行位置校准,保证作业无人机c准确降落在运输舱4内。
[0024]
此外,本发明提供了一种执行运输、信号中转及远程任务的无人机控制方法,采用如前述技术方案的执行运输、信号中转及远程任务的无人机控制系统进行控制,包括:在启动移动基站b前,将作业无人机c与移动基站b的信号中转装置5进行信号对接,并通过控制中心a控制运转阀门打开运输舱4,将作业无人机c放入移动基站b的运输舱4中并关闭阀门;启动移动基站b,通过控制中心a的控制平台3,发出指令,将移动基站b指挥飞行到指定位置,并寻找有利于信号中转的地点进行降落;移动基站b接收到控制中心a的控制平台3发出的指令,通过阀门运转,将运输舱4打开,控制平台3通过移动基站b的信号中转装置5来控制运输舱4内的作业无人机c起飞;控制平台3发出指令,通过信号中转,在控制作业无人机c起飞后,控制运输舱4的阀门运转,将移动基站b的运输舱4关闭;控制平台3发出指令,通过移动基站b的信号中转装置5,控制作业无人机c按照预设规则执行任务,通过自由转换摄像头10和传感器12,进行数据采集,并将采集好的数据传输至移动基站b的信号中转装置5,经中转后传输至控制中心a的信号接收系统1,将信号传至显示屏2,将数据显示并做出处理;作业无人机c的任务完成后,将作业无人机c回收至移动基站b的运输舱4;控制中心a根据信号中转装置5中转的信号,控制作业无人机c降落在运输舱4,控制中心a发出指令,运转阀门,控制运输舱4关闭;控制中心a发出指令,控制移动基站b飞回控制中心a或指定地点。
[0025]
其中,在将作业无人机c回收至移动基站b的运输舱4的步骤中,包括步骤:移动基站b将坐标信息发送给作业无人机c,作业无人机c根据坐标信息进行返航;作业无人机c返航至移动基站b时,发送到达指令至移动基站b,打开运输舱4,运输舱4展开为一个停机坪,移动基站b发射返回就绪的信号至作业无人机c,作业无人机c飞行至停机坪上方;运输舱4展开为停机坪的结构示意图如图6所示。在其合拢时,结构为立方体,通过控制使立方体运输舱4的外围侧板展开,形成以底面为中心的平面,以供作业无人机c降落。
[0026]
作业无人机c发射激光照射在停机坪上,进行位置校准,直至位置对应成功;移动基站b将对应成功的信号发射至作业无人机c,作业无人机c接收信号后垂直降落在停机坪上,并发送降落成功的信号至移动基站b;移动基站b接收降落成功的信号,控制闭合运输舱4。
[0027]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体
实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1