一种基于UWB定位的叉车防撞系统的制作方法
一种基于uwb定位的叉车防撞系统
技术领域
[0001]
本发明涉及空间定位及安全测距技术领域,具体涉及一种基于uwb定位的叉车防撞系统。
背景技术:
[0002]
近年来,随着仓储物流企业的迅速发展,对叉车使用需求也越来越多,随之而来的叉车事故也不断增加。叉车是仓库大型重吨位运输机械,因货物遮挡前方视线,视觉盲区较多,一旦发生碰撞,由于叉车及货物过重,很容易撞伤人或撞倒货架砸到人,给作业人员的人生安全带来极大的危险性。
[0003]
目前市场上叉车防撞方案主要以uwb单基站为主,此方案只能完成以叉车为圆心的固定范围预警,无法为叉车司机指示准确的行人标签方位,亦不能在紧急情况下控制叉车速度。因此如何精准的指示方位,有效地、智能化地控制叉车的速度,成为急需解决的技术问题。
技术实现要素:
[0004]
本发明目的:鉴于背景技术中的技术要求,我们设计一种基于uwb定位的叉车防撞系统,本设计基于uwb技术,采用了双基站形式的人员定位方案,所述的方案主要包含主定位基站、副定位基站和标签;其中所述的主副定位基站安装在叉车顶棚预设位置,用于发射uwb定位信号,uwb定位标签用于接收基站发射的定位信息,基站依据与标签交互的信息即可解算出uwb定位标签所处的位置。
[0005]
为解决上述问题采取的技术方案是:
[0006]
一种基于uwb定位的叉车防撞系统,包括定位基站、前后显示看板、声光报警器、叉车减速与刹车制动控制电路、通讯电路、uwb定位标签以及供电电路。
[0007]
所述定位基站包括安装于叉车固定位置的主基站和副基站,主基站、副基站均采用twr技术得到真实的测距距离,主基站内部设有uwb测距模块作为无线测距的核心部件,负责接收uwb定位标签的请求数据并向标签发送确认请求,主基站内部设有arm微处理器,负责主基站的uwb测距信号的收发控制,接收副基站的测距结果,微控制器利用主副基站的测距结果解算出定位标签的位置,副基站内部设有uwb测距模块作为无线测距的核心部件,负责接收uwb定位标签的请求数据并向标签发送确认请求,副基站内部设有arm微控制器,负责副基站的uwb测距信号的收发控制,计算副基站到uwb定位标签的实际距离,副基站通过rs232通信将真实测距距离送达主基站,主基站同时得到了自身的实际测距距离和副基站的实际测距距离,主基站通过计算自身实际距离与副基站的实际距离之差值即可判定标签所处的位置。
[0008]
所述前后显示看板为指示定位人员的具体方位而设,包括前显示看板和后显示看板,分别安装于叉车司机的前方和后方,每个显示看板分别有5组黄灯和1组红灯,黄灯作为向叉车司机指示定位标签的位置,红色灯作为叉车减速和制动指示灯。
[0009]
所述声光报警器为了向叉车司机警示危险而设,叉车正常运行工作人员进入危险范围时,声光报警器会立即发出鸣叫提醒司机减速慢行。
[0010]
叉车正常运行时周边有人员进入减速或制动的危险范围,主基站向叉车控制器发出指令,叉车减速与刹车制动的控制电路起作用,车辆立即减速慢行或刹车停止。
[0011]
所述通讯模块是在pc上安装相应的参数设置软件,rs232接口连接pc主机,通过pc端软件可设置叉车的三级报警距离以及五个方向的报警距离。
[0012]
所述uwb定位标签包括arm微控制器、uwb信号处理、收发天线、电源管理模块、指示灯、震动马达、电池电压检测和震动开关。
[0013]
所述uwb信号处理一端与收发天线相连,另一端与arm微控制器相连,指示灯、震动马达、电池电压检测和震动开关与arm微控制器相连,电源管理模块为uwb定位标签各部分提供电能。
[0014]
进一步地,所述arm微控制器选用体积小、功能强大的stm32单片机用于计算uwb定位标签的位置、电池电压检测、驱动震动马达、识别震动开关状态以及通过spi接口控制uwb信号处理单元数据的发送与接收。
[0015]
进一步地,所述的uwb定位标签电源管理模块包括锂离子电池、充电模块和磁吸充电接口。
[0016]
进一步地,所述电池采用体积小、能量密度高的锂离子电池为标签提供电能,充电接口使用磁吸充电技术。
[0017]
进一步地,所述uwb定位标签设有三种不同颜色的指示灯,包括蓝色充电指示灯、黄色工作指示灯和红色低电量报警灯,连接充电器标签蓝色指示灯亮起表示标签正在充电,充电完成蓝色指示灯熄灭。
[0018]
进一步地,所述震动开关准确的识别标签处于静默状态或工作状态,所述uwb定位标签在完全静止状态下,蓝色工作灯不闪烁,当标签的电量低于20%时,红色低电量灯会闪烁提醒佩戴人员及时充电,标签充电以及正常工作时,低电量灯熄灭。
[0019]
进一步地,所述震动马达是当标签进入叉车防撞系统设置的报警范围时,标签震动提醒佩戴的员工附近有运作的叉车,应尽快离开此区域,进入安全区域,标签离开报警范围时,标签不再震动提示。
[0020]
进一步地,各部分接口之间全部采用航空插头,以保证可靠性。
[0021]
本发明的有益效果是:
[0022]
该基于uwb定位的叉车防撞系统通过调整基站的测距预警距离来实现,主基站内部设有uwb测距模块作为无线测距的核心部件,负责接收uwb定位标签的请求数据并向标签发送确认请求,作为本发明的最基础外设发挥不可替代的作用,基站可设置三种预警方式,声光报警、减速以及刹车制动,人员携带标签进入此三种预警范围,叉车可立即响应并做出相应的处理,而降低人身伤害;人员定位精度高,能够准确地测算人员标签的位置;另外本设计结构简单、易于安装与维护,使用此发明能够极大的降低甚至避免叉车工作人员的人身伤害
附图说明
[0023]
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使
用的附图作简单地介绍。
[0024]
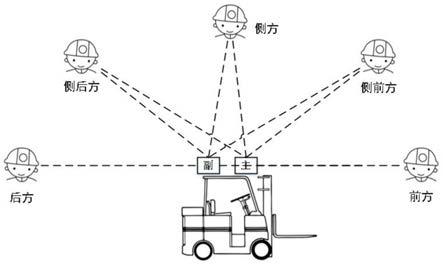
图1为本实施例人员定位位置解算示意图;
[0025]
图2为本实施例定位基站结构框图;
[0026]
图3为本实施例定位标签结构框图;
[0027]
图4为本实施例12v to 5v的供电电路原理图;
[0028]
图5为本实施例5v to 3.3v的供电电路原理图;
[0029]
图6为本实施例rs232通讯电路原理图;
[0030]
图7为本实施例uwb定位模块电路接线原理图;
[0031]
图8为本实施例声光报警控制电路原理图;
[0032]
图9为本实施例叉车减速控制电路原理图;
[0033]
图10为本实施例刹车制动控制电路原理图;
[0034]
图11为本实施例电源指示灯电路原理图;
[0035]
图12为本实施例蜂鸣器电路原理图;
[0036]
图13为本实施例rs232转pc主机通讯电路原理图;
[0037]
图14为本实施例arm微处理器接线电路原理图;
[0038]
图15为本实施例ldo稳压电路原理图;
[0039]
图16为本实施例uwb无线收发接线电路原理图;
[0040]
图17为本实施例uwb定位标签指示灯电路原理图;
[0041]
图18为本实施例1.8v供电电路原理图;
[0042]
图19为本实施例存储器接线电路原理图;
具体实施方式
[0043]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0044]
请参阅图1-19,本实施例提出一种基于uwb定位的叉车防撞系统,包括定位基站、前后显示看板、声光报警器、叉车减速与刹车制动控制电路、通讯电路、基于uwb的uwb定位标签以及供电电路。
[0045]
具体地说,所述定位基站包括安装于叉车固定位置的主基站和副基站,主基站、副基站均采用twr技术得到真实的测距距离,副基站通过rs232通信将真实测距距离送达主基站,主基站内部设有uwb测距模块作为无线测距的核心部件,负责接收uwb定位标签的请求数据并向标签发送确认请求,主基站内部设有arm微处理器,负责主基站的uwb测距信号的收发控制,接收副基站的测距结果,微控制器利用主副基站的测距结果解算出uwb定位标签的位置,副基站内部设有uwb测距模块作为无线测距的核心部件,负责接收uwb定位标签的请求数据并向uwb定位标签发送确认请求,副基站内部设有arm微控制器,负责副基站的uwb测距信号的收发控制,计算副基站到uwb定位标签的实际距离,向主基站发送测距数据,主基站同时得到了自身的实际测距距离和副基站的实际测距距离,主基站通过计算自身实际距离与副基站的实际距离之差值即可判定标签所处的位置,目前可区分出5个方位:前方、侧前方、侧方、侧后方、后方。
[0046]
所述前后显示看板为指示定位人员的具体方位而设,包括前显示看板和后显示看
板,分别安装于叉车司机的前方和后方,每个显示看板分别有5组黄灯和1组红灯,黄灯作为向叉车司机指示定位标签的位置,红色灯作为叉车减速和制动指示灯,例如:叉车向前行驶,前方工作人员携带定位标签处于预警范围内显示看板前方黄灯亮起,叉车继续向前行驶到达减速预警范围红色灯亮起,叉车立即减速提醒司机慢行有危险。
[0047]
所述声光报警器为了向叉车司机警示危险而设,叉车正常运行工作人员进入危险范围时,声光报警器会立即发出鸣叫提醒司机减速慢行。
[0048]
叉车正常运行时周边有人员进入减速或制动的危险范围,主基站向叉车控制器发出指令,叉车减速与刹车制动的控制电路起作用,车辆立即减速慢行或刹车停止。
[0049]
所述通讯模块是在pc上安装相应的参数设置软件,rs232接口连接pc主机,通过pc端软件可设置叉车的三级报警距离以及五个方向的报警距离,例如:后方报警设为10米、减速设为8米、刹车设为6米。
[0050]
所述uwb定位标签包括arm微控制器、uwb信号处理、收发天线、电源管理模块、指示灯、震动马达、电池电压检测和震动开关,所述arm微控制器选用体积小、功能强大的stm32单片机用于计算uwb定位标签的位置、电池电压检测、驱动震动马达、识别震动开关状态以及通过spi接口控制uwb信号处理单元数据的发送与接收,所述uwb信号处理一端与收发天线相连,另一端与arm微控制器相连,指示灯、震动马达、电池电压检测和震动开关与arm微控制器相连,电源管理模块为uwb定位标签各部分提供电能,所述的uwb定位标签电源管理模块包括锂离子电池、充电模块和磁吸充电接口,所述电池采用体积小、能量密度高的锂离子电池为标签提供电能,充电接口使用磁吸充电技术。
[0051]
进一步的实施方案是,所述uwb定位标签设有三种不同颜色的指示灯,包括蓝色充电指示灯、黄色工作指示灯和红色低电量报警灯,连接充电器标签蓝色指示灯亮起表示标签正在充电,充电完成蓝色指示灯熄灭,
[0052]
进一步的实施方案是,所述震动开关准确的识别标签处于静默状态或工作状态,所述uwb定位标签在完全静止状态下,蓝色工作灯不闪烁,当标签的电量低于20%时,红色低电量灯会闪烁提醒佩戴人员及时充电,标签充电以及正常工作时,低电量灯熄灭,
[0053]
进一步的实施方案是,所述震动马达是当标签进入叉车防撞系统设置的报警范围时,标签震动提醒佩戴的员工附近有运作的叉车,应尽快离开此区域,进入安全区域,标签离开报警范围时,标签不再震动提示。
[0054]
进一步的实施方案是,各部分接口之间全部采用航空插头,以保证可靠性。
[0055]
工作过程如下:基站与uwb定位标签正常工作,首先使用rs232接口连接pc并设置各方向和各级别报警距离,此刻准备工作就绪。假定设置的某一方向的参数为:前方10米报警、前方8米减速和前方6米刹车制动。叉车在正常工作,有一工作人员携带uwb定位标签由前方慢慢靠近,当到达叉车10米范围内安装在叉车上的显示看板前方黄色指示灯亮起以提醒司机,人员携带的uwb定位标签震动以提醒行人;当人员到达叉车8米范围内车辆在基站控制下立即减速行驶,显示看板红色指示灯亮起;当到达叉车6米范围内车辆在基站的控制下立即刹车制动,显示看板全部指示灯亮起提示司机有极大的安全隐患;人员标签在整个过程中持续震动。
[0056]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下
做出各种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1