一种无人机辅助蜂窝网络中无人机部署方法
1.本发明属于无线通信技术领域,涉及一种无人机辅助蜂窝网络的无人机部署方法。
背景技术:
2.无人机(uav)作为空中接入点能够有效提高覆盖率、区域频谱效率以及用户体验质量,因而将无人机通信引入到蜂窝网络中是一种有前景的技术,可以显著提高无人机和现有地面用户的通信性能。与地面接入点相比,无人机的灵活、快速和按需部署使其能够为覆盖漏洞、热点区域、偏远地区或通信故障的应急场景提供全面的覆盖和数据传送服务,而无需建设新的地面通信相关基础设施。此外,与地面基站相比,无人机的另一个显著优势是以更高可能性通过视距(los)链路为地面用户服务,这使得用户能获得比非视距(nlos)链路相比更好的有用信号质量。然而,由于频谱资源的稀缺性,无人机与地面蜂窝基站共享频谱将会引入互相干扰,而无人机的视距传播条件使得互相干扰更为严重。因此,为了既能抑制无人机引入蜂窝通信中带来的干扰又能充分利用无人机视距传输的优势以拓展网络覆盖和增强网络容量,需要设计有效的无人机三维部署方案。
3.无人机部署方案的优劣与诸多因素具有强相关性,如部署地理环境、地面基站位置、地面用户位置,空对地信道特性,自身高度等,从而使得得到最优的无人机三维部署极具挑战性。此外,无人机之间的互相干扰和无人机与地面站点之间的干扰进一步复杂化无人机部署问题。针对这些问题,一般方法是以某种性能指标为优化目标且以无人机部署位置为一类优化变量,随后结合不同通信需求附属上对应的限制条件,从而形成一个最优化问题,并基于优化理论进行位置部署的算法设计。通常采用以上方法的研究所关注的场景大多是固定位置的有限个地面基站或仅考虑一个地面基站的场景(参见文献:t.zhang,y.wang,y.liu,w.xu and a.nallanathan,cache
‑
enabling uav communications:network deployment and resource allocation,ieee transactions on wireless communications,2020,19(11):7470
‑
7483.)。然而,当前蜂窝网络密集化部署进一步增强了优化问题的复杂性,而且固定位置的多地面基站模型无法反映现实网络节点在空间分布上的非规则性和多变性,进而使得作为补充节点的无人机同样具有非规则性和多变形性。为了更好体现现网节点的空间分布特性,另一类基于随机几何理论的研究广泛引起了学术界和业界的关注。为了分析的简单性,许多文献假定地面基站(或者地面用户)和无人机服从相互独立的齐次泊松点过程(poisson point process,ppp)(参见文献:j.liu,m.sheng,r.lyu and j.li,performance analysis and optimization of uav integrated terrestrial cellular network,ieee internet of things journal,2019,6(2):1841
‑
1855.和d.kim,j.lee and t.q.s.quek,multi
‑
layer unmanned aerial vehicle networks:modeling and performance analysis,ieee transactions on wireless communications,2020,19(1):325
‑
339.)。然而,由于无人机是蜂窝网络的辅助接入点,假设地面基站或无人机的位置彼此独立是不现实的,需要考虑将无人机部署于地面基站的边
缘区域,否则会引入强干扰导致用户体验下降。同时,无人机的高度部署在覆盖范围与信号质量上存在竞争关系,例如无人机部署高度越高,则覆盖范围越大,从而边缘区域可以部署较少无人机,但路损会导致用户信号质量降低。因此,无人机部署需要兼顾相对于地面基站位置相关性的水平部署以及自身的高度部署。
4.基于此,本发明提出一种基于空间相关性的无人机部署方案,可以保护地面基站通信链路和无人机通信不受相互间的强干扰所影响,同时提出了一个基于随机几何理论的匹配分析方法对关键性能指标,用于快速评估出某一具体应用场景及性能需求下的最优水平和高度部署方案。具体地,每个地面基站设有一个排斥区域,而无人机仅部署在排斥区域以外,则在这个部署方案下,地面基站位置和无人机水平投影分别可以建模为泊松点过程和泊松洞过程。考虑到无人机的空间位置还具有垂直维度上的分量,即高度,则无人机的三位空间位置服从一个带高度标签的泊松洞过程,即标签化泊松洞过程。由于排斥区域破坏了泊松点过程的独立性,难以给出干扰特性的精确表达式,从而难以搜索和寻优该策略下的最佳排斥区域和高度大小。因此本发明提出采用推导干扰特性近似的方法以及采用空间特性相似且易于分析的其他点过程对干扰特性进行近似的方法来解决上述问题。
5.本发明由国家自然科学基金项目(no.61701071)资助。
技术实现要素:
6.现有技术中,无人机辅助的蜂窝网络通常将无人机随机部署在蜂窝网络上方,但是在蜂窝网络中引入无人机通信之后也会带来同频干扰问题,并且无人机的部署高度亦会对系统性能以及用户体验产生极大的影响。针对上述问题,本发明提出一种基于空间排斥的无人机辅助蜂窝网络通信的无人机部署方案,并且提出一个与之相匹配的性能评估与优化方法。这种无人机部署方法,不仅仅将无人机通信引入到蜂窝通信中所带来的干扰问题进行抑制,也考虑无人机高度部署的优化方案。
7.为了达到上述目的,本发明采用的技术方案如下:
8.一种无人机辅助的蜂窝通信网络中无人机空间部署方法,包含以下步骤:
9.步骤一:信息收集和建立模型
10.步骤1.1基站收集信息:根据信息来源的不同,基站收集信息过程主要包括三个过程:
11.(1)用户向基站反馈信息,包括用户位置信息以及用户通信过程中所需的信干比(signal
‑
to
‑
interference ratio,sir)阈值。基站根据上述信息可估计用户密度λ
c
。
12.(2)无人机向基站反馈信息,包括发射功率μ
u
,天线阵列的主瓣增益g
m
、旁瓣增益g
s
、垂直向下覆盖波束宽度无人机飞行高度的法规范围,其中最低高度为h
m
和最大高度为h
m
。无人机向基站反馈位置,基站根据位置信息可估计无人机密度λ
u
。
13.(3)基站通过网络侧获取其他系统信息。包括地面基站密度λ
g
、基站发射功率μ
g
、地面链路的路径损耗模型、空对地链路的路径损耗模型等。所述的地面链路的路径损耗模型为α
g
是地面路径损耗指数并且α
g
>2,x是地面基站的位置。所述的空对地链路的路径损耗模型α
x
是无人机和用户通信的路径损耗指数α
x
>2,其中los链路的路径损耗指数为α
l
和nlos链路的路径损耗指数为α
n
,x是无人机在地面上的
投影位置,以及h是无人机的飞行高度。空对地链路的概率视距传输模型参数a和b,其中a和b是sigmoid函数(s曲线)的两个模型参数,可以由网络侧通过拟合实际但复杂的视距传输概率模型得到(参见文献:a.al
‑
hourani,s.kandeepan and s.lardner,optimal lap altitude for maximum coverage,ieee wireless communications letters,2014,3(6):569
‑
572.)。
14.所述sigmoid函数表达式为
[0015][0016]
其中,是仰角,以及a和b是该函数(s曲线)的两个模型参数。
[0017]
步骤1.2建立模型:依据收集的信息即地面基站密度和用户密度,将地面基站和用户这两种网络节点的空间位置分布分别建模为两个相互独立泊松点过程模型φ
g
和φ
c
,各自的密度分别为λ
g
和λ
c
。空对地的链路状态是建模成一个概率视距传输模型,其中信道条件以概率p
l
为los传播链路而以概率1
‑
p
l
为nlos传播链路,其中,p
l
为los概率。
[0018]
根据收集信息中的主瓣增益、旁瓣增益和半功率波束宽度,建立无人机的平顶天线阵列方向图模型:
[0019][0020]
其中,φ∈(
‑
π/2,π/2]是发送波束所对应的到达角相对于垂直向下方向的夹角。小尺度信道衰落建模为瑞利衰落,衰落因子g
x
服从指数分布。
[0021]
步骤二:选择无人机部署方案参数和用户分类
[0022]
步骤2.1无人机部署主要包括无人机的位置部署和无人机的波束覆盖两个部分,目的是为了降低与地面基站的互相干扰。
[0023]
第一部分:设定排斥区域,降低排斥区域内部的用户所受到的来自无人机通信的干扰,提高排斥区域内部的用户通信性能。具体地,设置地面基站的区域,将无人机的空间位置部署于基站的排斥区域外(或控制排斥区域内的无人机飞向排斥区域外的随机位置)且所有无人机位于相同高度h,则此时无人机的空间分布建模为密度λ
u
的标签化泊松洞过程(poisson hole process,php),记为φ
u
,其中每个点的标签是无人机的飞行高度h。所述的排斥区域为:以基站为中心,面积不超过1/λ
g
的一个区域,可以是方形、圆形或其他对称形状的区域;所述的区域优选为圆形,当为圆形时,圆形区域的半径称为排斥半径,表示为d,取值范围在之间。所述的无人机飞行高度需要满足无人机飞行高度的法规范围,取值范围在(h
m
,h
m
)。
[0024]
第二部分:无人机垂直波束覆盖,进一步降低无人机对排斥区域内部用户的干扰。每个无人机垂直向下进行波束覆盖,其中波束的主瓣宽度为则无人机在地面上的主瓣覆盖区域的半径为根据无人机的平顶天线阵列方向图模型,当用户位于主瓣覆盖区域中,无人机波束增益为g
m
,而当用户不位于主瓣覆盖区域中,放无人机波束增益为g
s
。
[0025]
步骤2.2用户接入机制,基于基站的排斥区域和无人机的主瓣覆盖区域,用户被分
为三部分:1)位于排斥区域内部的用户连接到最近地面基站进行通信,记为地面中心用户;2)位于排斥区域外部以及无人机的主瓣覆盖区域内的用户连接到最近无人机进行通信,记为无人机用户;3)位于排斥区域外部但位于无人机的主瓣覆盖区域外的用户连接到最近地面基站进行通信,记为地面边缘用户。
[0026]
上述步骤2.1与2.2相结合,组成了本发明所提出无人机部署和用户服务的具体方法。
[0027]
步骤三:性能评估与寻优
[0028]
性能评估与寻优的总体过程为基于步骤1所建立的模型以及采用步骤2所提出的无人机部署与用户接入方法,先依具体场景及需求选取一个关键性能指标;随后,在给定的一组参数设置(包括基站排斥区域大小和无人机的飞行高度)采用随机几何理论的分析方法对三类用户(即地面中心用户、地面边缘用户和无人机用户)评估所选的关键性能指标;最后,在评估多组参数设置后,通过比较关键性能指标的大小,寻找最佳排斥区域的大小(或者说最佳排斥半径取值)和最优无人机高度。具体的过程:
[0029]
步骤3.1评估过程:基于步骤1所建立的模型以及采用步骤2所提出的无人机部署与用户接入方法,先依具体场景及需求选取一个关键性能指标,随后在给定的一组参数设置(包括基站排斥区域大小和无人机的飞行高度)采用随机几何理论的分析方法对三类用户(即地面中心用户、地面边缘用户和无人机用户)评估所选的关键性能指标。
[0030]
所述分析方法是指利用随机几何理论,对地面中心用户、地面边缘用户和无人机用户的信干比(signal
‑
to
‑
interference ratio,sir)的统计分布进行分析的两种方法:1)基于虚拟无人机的泊松点过程给出不同类型用户信干比分布的理论下界,其中所述虚拟无人机的泊松点过程是密度为的泊松点过程;2)将步骤2.1中的泊松洞过程近似为相同密度的泊松点过程,进而得到不同类型用户信干比分布的一个近似结果。
[0031]
所述排斥区域的设置,为在排斥半径d的取值范围内,选取不少于两个值。所述飞行高度的设置,为在无人机高度h的取值范围内,选取不少于两个值。随后分析三类用户在采用所提无人机部署和用户接入方法所能够获得的性能,也就是说,分析所提无人机部署和用户服务方法在不同排斥区域大小和无人机高度的情况下,所取得的收益效果。
[0032]
所述关键性能指标包含链路级指标以及网络级指标,依具体场景及需求而定:
[0033]
1)链路级指标:用户成功概率,表示为其中a
gc
,a
uu
和a
ge
分别是地面中心用户、无人机用户和地面边缘用户占总体用户的比例,和分别是地面中心用户、无人机用户和地面边缘用户在信干比门限θ
c
,θ
u
和θ
e
下的成功概率。具体表达式有理论上界结果和近似结果两种类型。理论上界为:
[0034][0035][0036]
[0037]
其中,i
g1
是来自同频基站对地面中心用户的干扰;是来自同频无人机对地面用户的干扰上界;i
g2
是来自同频基站对无人机用户的干扰;是来自同频无人机对无人机用户的干扰上界;i
g3
是来自同频基站对地面边缘用户的干扰;是来自同频无人机对地面边缘用户的干扰上界;和分别是干扰i
g1
,i
g2
,i
g3
,和的laplace变换;f1(r),f2(r)和f3(r)分别是地面中心用户、无人机用户和地面边缘用户到各自服务站点的距离分布。近似结果为:
[0038][0039][0040][0041]
其中,是来自同频无人机对地面用户的干扰近似;是来自同频无人机对无人机用户的干扰近似;是来自同频无人机对地面边缘用户的干扰近似。和分别是干扰和的laplace变换;
[0042]
2)网络级指标包括区域频谱效率、网络能量效率等。所述区域频谱效率表示为
[0043][0044]
其中λ
g
和λ
u
分别是地面基站和无人机的密度。所述网络能量效率表示为
[0045][0046]
其中,ase是网络的区域频谱效率;λ
g
和λ
u
分别是地面基站和无人机的密度;ξ
g
和ξ
u
分别是地面基站和无人机消耗的总功率。
[0047]
步骤3.2寻优过程:采用步骤3.1的评估过程,设置多组不同排斥区域和飞行高度以进行关键性能指标的评估,并基于所得的分析结果,选择性能最大值(例如用户成功概率最大、区域频谱效率最大或网络能效最大等)所对应的排斥半径和飞行高度作为最优激活区域和最优飞行高度,并以此时的排斥半径和飞行高度取值作为最终的排斥区域和无人机高度设置。
[0048]
步骤四:实施无人机部署方案
[0049]
步骤4.1基于所评估得到的最优排斥区域和最优高度,由地面基站反馈给无人机,控制其部署于最优排斥区域外且飞行于最优高度。
[0050]
步骤4.2地面基站把分类信息反馈给用户,用户按接收到的指令进行接入网络,其中地面中心用户与和地面基站进行通信,无人机用户和无人机进行通信以及地面边缘用户与和地面基站进行通信。
[0051]
本发明的有益效果为:本发明的无人机辅助蜂窝网络通信中无人机部署方法考虑
了引入无人机通信之后对原始地面蜂窝网络所带来的干扰问题。所提出的匹配模型和评估方法能够对无人机辅助的蜂窝网络的无人机高度选择以及无人机与蜂窝通信中的相互干扰进行一定程度的抑制,保证中心用户的通信性能不因无人机通信的引入而恶化,同时增强位于小区边缘用户的通信性能。特别地,所提出的评估方法是在统计意义上对全网进行的优化。该方法与现有多数仅基于单小区优化或有限个多小区的联合优化方法或无人机在蜂窝网络上方进行随机部署具有显著不同。该方法所需要的收集信息大多是相对静态的(或者说变化缓慢的),不需要频繁地测量与汇报。因此,基于该评估方法所做出的决策(例如最优排斥区域大小和最优飞行高度)能够在较长时间范围内有效,避免了频繁决策所引入的大量繁锁的计算和资源消耗。综上,所提干扰抑制及其评估方法具有简单、快捷、通用的优势,可显著降低信令开销及系统复杂度,且对用户来说是透明的,不需要用户进行额外的测量与汇报,减少用户负担。
附图说明
[0052]
图1是本发明的系统结构示意图。
[0053]
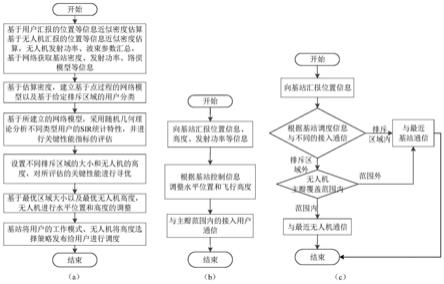
图2(a)是本发明的地面基站侧工作流程图。
[0054]
图2(b)是本发明的无人机侧工作流程图。
[0055]
图2(c)是本发明的用户侧工作流程图。
[0056]
图3为步骤3.2中用户成功概率与排斥半径d及无人机高度h的关系曲线。
具体实施方式
[0057]
以下结合附图详细叙述本发明的具体实施方式。
[0058]
示意图如图1所示。以圆形排斥区域为例进行分析,但本发明不限于圆形,可以是方形,扇形,三角形或者是其他不规则的形状。
[0059]
基站端的具体实施方式包括以下步骤:
[0060]
步骤一:信息收集和建立模型
[0061]
步骤1.1:信息收集
[0062]
地面基站通过用户汇报获取用户位置信息,以此估算用户的密度λ
c
。基站和无人机之间进行信令的交互,并且基站获取无人机所在的位置等信息,以此估算无人机的密度λ
u
,无人机的发射功率配置μ
u
,无人机天线阵列的主瓣增益g
m
、旁瓣增益g
s
、垂直向下覆盖波束宽度无人机飞行高度的法规范围,其中最低高度为h
m
和最大高度为h
m
。基站通过网络侧获取其他信息,如地面链路的路径损耗模型为α
g
是地面路径损耗指数并且α
g
>2,x是地面基站的位置。所述的空对地链路的路径损耗模型α
x
是无人机和用户通信的路径损耗指数α
x
>2,其中los链路的路径损耗指数为α
l
和nlos链路的路径损耗指数为α
n
,x是无人机在地面上的投影位置,以及h是无人机的飞行高度。空对地链路的概率视距传输模型参数a和b,其中a和b是sigmoid函数(s曲线)的两个模型参数,可以由网络侧通过拟合实际但复杂的视距传输概率模型得到(参见文献:a.al
‑
hourani,s.kandeepan and s.lardner,optimal lap altitude for maximum coverage,ieee wireless communications letters,2014,3(6):569
‑
572.)。所述sigmoid函数表达式为
[0063][0064]
其中,是仰角,以及a和b是该函数(s曲线)的两个模型参数。小尺度信道衰落模型,以瑞利衰落为例,即衰落因子g
x
服从指数分布。获取基站密度的估算值λ
g
。基站的发射功率配置,用μ
g
表示。
[0065]
步骤1.2:建立模型
[0066]
依据步骤1.1收集的信息依据收集的信息即地面基站密度和用户密度,将地面基站和用户这两种网络节点的空间位置分布分别建模为两个相互独立泊松点过程模型φ
g
和φ
c
,各自的密度分别为λ
g
和λ
c
。空对地的链路状态是建模成一个概率视距传输模型,其中信道条件以概率p
l
为los传播链路而以概率1
‑
p
l
为nlos传播链路。los概率p
l
表示为:
[0067][0068]
其中,r和h分别表示无人机与地面用户之间的水平距离和垂直距离。nlos传播链路的概率为p
n
=p
n
(r,h)=1
‑
p
l
(r,h)。根据收集信息中的主瓣增益、旁瓣增益和半功率波束宽度,建立无人机的平顶天线阵列方向图模型:
[0069][0070]
其中,φ∈(
‑
π/2,π/2]是发送波束所对应的到达角相对于垂直向下方向的夹角。
[0071]
步骤二:选择无人机部署参数和用户分类
[0072]
步骤2.1无人机部署主要包括无人机的位置部署和无人机的波束覆盖两个部分。
[0073]
第一部分:设定排斥区域,降低排斥区域内部的用户所受到的来自无人机通信的干扰,提高排斥区域内部的用户通信性能。具体地,设置地面基站的区域,将无人机的空间位置部署于基站的排斥区域外且所有无人机位于相同高度h,则此时无人机的空间分布建模为密度λ
u
的标签化泊松洞过程(poisson hole process,php),记为φ
u
,其中每个点的标签是无人机的飞行高度h。所述的排斥区域为:以基站为中心,面积不超过1/λ
g
的一个圆形区域,则圆形区域的半径称为排斥半径,表示为d,在区间内取不少于两个值。所述的无人机飞行高度需要满足无人机飞行高度的法规范围,在区间(h
m
,h
m
)内取不少于两个值。
[0074]
第二部分:无人机垂直波束覆盖,进一步降低无人机对排斥区域内部用户的干扰。每个无人机垂直向下进行波束覆盖,其中波束的主瓣宽度为则无人机在地面上的主瓣覆盖区域的半径为根据无人机的平顶天线阵列方向图模型,当用户位于主瓣覆盖区域中,无人机波束增益为g
m
,而当用户不位于主瓣覆盖区域中,放无人机波束增益为g
s
。
[0075]
步骤2.2用户接入机制,基于基站的排斥区域和无人机的主瓣覆盖区域,用户被分为三部分:1)位于排斥区域内部的用户连接到最近地面基站进行通信,记为地面中心用户;2)位于排斥区域外部以及无人机的主瓣覆盖区域内的用户连接到最近无人机进行通信,记
为无人机用户;3)位于排斥区域外部但位于无人机的主瓣覆盖区域外的用户连接到最近地面基站进行通信,记为地面边缘用户。
[0076]
步骤三:性能评估与寻优
[0077]
步骤3.1:性能评估
[0078]
由于未来网络是密集部署的,因此考虑干扰受限网络,即忽略热噪声对性能的影响。基于泊松点过程的平稳性,仅考虑位于原点的中心用户可以得到中心的平均性能。同样地,仅考虑位于原点的边缘用户可以得到边缘用户的平均性能。具体地,本发明以用户的成功概率(链路级性能指标)、区域频谱效率(网络级性能指标)和网络能量效率(网络级性能指标)三个指标作为关键性能指标,根据当前所关注的具体性能和需求,可其中一个指标作为寻找最佳排斥半径的依据,例如选择用户的成功概率作为寻优的关键性能指标。
[0079]
所述用户的成功概率、区域频谱效率和网络能量效率三个指标的具体定义如下:
[0080]
1.用户的成功概率
[0081]
用户的成功概率通常可以表示为在给定一个信干比(signal
‑
to
‑
interference ratio,sir)门限前提下,用户的接收sir大于该门限的概率。采用全概率公式,可以得到整体用户的成功概率p
s
,表示为
[0082][0083]
其中和分别为地面中心用户,无人机用户和地面边缘用户的比例,d是基站排斥区域半径,r
u
是无人机在地面上的主瓣覆盖区域的半径,λ
g
和λ
u
分别是地面基站和无人机的密度,为虚拟无人机泊松点过程的密度;θ
c
,θ
u
和θ
e
分别是地面中心用户,无人机用户和地面边缘用户的信干比门限;和分别是地面中心用户,无人机用户和地面边缘用户的信干比的互补累计分布函数。
[0084]
2.区域频谱效率(area spectrum efficiency,ase)
[0085]
区域频谱效率是单位面积下所能达到的频谱效率。根据给定的sir门限,可得到
[0086][0087]
其中和分别为地面中心用户和地面边缘用户的比例,d是基站排斥区域半径,r
u
是无人机在地面上的主瓣覆盖区域的半径,λ
g
和λ
u
分别是地面基站和无人机的密度,为虚拟无人机泊松点过程的密度;θ
c
,θ
u
和θ
e
分别是地面中心用户,无人机用户和地面边缘用户的信干比门限;和分别是地面中心用户,无人机用户和地面边缘用户的信干比的互补累计分布函数。
[0088]
3.网络能量效率(network energy efficiency,nee)
[0089]
由于蜂窝网络的能量消耗主要来自于基站和无人机的能量消耗,以线性功耗模型为例用于计算某个基站所消耗的功率,如下:
[0090]
ξ
g
=a
g
μ
g
+w
g
,ξ
u
=a
u
μ
u
+w
u
[0091]
其中a
g
和a
u
分别是地面基站和无人机功率放大器的效率,w
g
和w
u
分别是基站与无人机的与发射功率相独立的静态功率消耗(比如电路功率消耗,信号处理和飞行控制的功率消耗),且这些参数可以在步骤一从网络侧出获取这种功耗模型参数。能效可以定义为单位面积下所能达到的频谱效率和所消耗总功率的比值,因此可以表示为
[0092][0093]
其中,ase是网络的区域频谱效率;nee是网络能效;λ
g
和λ
u
分别是地面基站和无人机的密度;ξ
g
和ξ
u
分别是地面基站和无人机消耗的总功率。
[0094]
根据用户的成功概率、区域频谱效率和网络能量效率三个指标的定义可知,信干比是反映用户与网络可达性能的一个基本物理量,并且对中心用户和边缘用户的sir统计特性的分析是实现对上述三个指标评估的必经之路。因此,接下来将具体展开说明如何基于所建立的点过程模型以及所提出的干扰抑制方法,对中心用户以及边缘用户的sir统计特性进行分析。具体地,本发明提出以下两种分析方法:1)基于虚拟无人机的泊松点过程给出不同类型用户信干比统计分布的理论下界;2)将步骤2.1中的泊松洞过程近似为相同密度的泊松点过程,进而得到不同类型用户信干比分布的一个近似结果。具体过程如下:
[0095]
3.1.1基于虚拟无人机ppp的不同类型用户的sir统计分布的理论下界
[0096]
由于实际部署的无人机是虚拟无人机的子集,若将所有虚拟无人机都激活,则来自同频无人机的干扰要大于实际部署无人机干扰。因此,不同类型用户的sir统计分布将得到理论下界。为方便理论公式书写,记r1=min(d
‑
r,r
u
),),以及f(α,y)=2f1(1,1
‑
2/α;2
‑
2/α;
‑
y)为高斯超几何函数。
[0097]
1.中心基站用户sir统计分布的理论下界
[0098]
基于步骤1所建立的网络模型及步骤2所提出的无人机部署和用户接入策略,位于排斥区域内部的用户sir统计分布(具体指sir的互补累计分布函数)的理论下界为
[0099][0100]
其中是地面中心用户到其服务地面基站的距离分布,i
g1
是来自同频基站对地面中心用户的干扰;是来自同频无人机对地面用户的干扰上界。和是干扰i
g1
和的laplace变换,表达式为和
[0101][0102]
其中,r是积分变量,t是积分变量;i是求和索引,当i=l表示所有有关的变量对应于los链路的变量,如α
i
=α
l
是los链路的路损指数,p
i
(t,h)=p
l
(t,h)是为los链路的概率,而α
i
=α
n
是nlos链路的路损指数,p
i
(t,h)=p
n
(t,h)是为nlos链路的概率;
[0103]
2.无人机用户sir的统计分布
[0104]
基于步骤1所建立的网络模型及步骤2所提出的无人机部署和用户接入策略,位于排斥区域外部且在无人机主瓣覆盖范围内的用户sir统计分布(具体指sir的互补累计分布函数)的理论下界别表示为:
[0105][0106]
其中是无人机用户到其服务无人机的距离分布,i
g2
是来自同频基站对无人机用户的干扰;是来自同频无人机对无人机用户的干扰上界。和是干扰i
g2
和的laplace变换,表达式为:
[0107][0108][0109]
3.边缘基站用户sir的统计分布
[0110]
基于步骤1所建立的网络模型及步骤2所提出的无人机部署和用户接入策略,位于排斥区域外部且在无人机主瓣覆盖范围内的用户sir统计分布(具体指sir的互补累计分布函数)的理论下界分别表示为
[0111][0112]
其中是地面边缘用户到其服务地面基站的距离分布,且
[0113][0114]
i
g3
是来自同频基站对地面边缘用户的干扰;是来自同频无人机对地面边缘用户的干扰上界。和是干扰i
g3
和的laplace变换,表达式为
[0115][0116][0117]
3.1.2基于近似ppp模型对不同类型用户的sir统计分布的近似
[0118]
将部署于排斥区域外的无人机近似为相同密度的稀释ppp,则来自无人机的干扰是实际干扰的一种近似。因此,不同类型用户的sir统计分布将得到近似的理论结果。
[0119]
1.中心基站用户sir近似统计分布
[0120]
基于步骤1所建立的网络模型及步骤2所提出的无人机部署和用户接入策略,位于排斥区域内部的用户sir统计分布(具体指sir的互补累计分布函数)的理论结果近似为:
[0121][0122]
其中是来自同频无人机对地面用户的干扰近似,其laplace变换为:
[0123][0124]
2.无人机用户sir的统计分布
[0125]
基于步骤1所建立的网络模型及步骤2所提出的无人机部署和用户接入策略,位于排斥区域外部且在无人机主瓣覆盖范围内的用户sir统计分布(具体指sir的互补累计分布函数)近似为:
[0126][0127]
其中是来自同频无人机对无人机用户的干扰近似,其laplace变换为:
[0128][0129]
3.边缘基站用户sir的统计分布
[0130]
基于步骤1所建立的网络模型及步骤2所提出的无人机部署和用户接入策略,位于排斥区域外部且在无人机主瓣覆盖范围内的用户sir统计分布(具体指sir的互补累计分布函数)的近似为:
[0131][0132]
其中是来自同频无人机对地面边缘用户的干扰近似,其laplace变换为:
[0133][0134]
步骤3.2:寻优过程
[0135]
在之间设置m个不同的排斥区域半径的取值d1,d2,d3,
…
d
m
,m≥2,并在(h
m
,h
m
)之间设置n个不同的飞行高度的取值h1,h2,h3,
…
h
n
,n≥2。对每一组排斥半径和飞行高度的取值选择步骤3.1中的一个关键性能指标以及分析方法,对所选择的性能指标进行评估,研究关键性能与排斥半径和飞行高度的关系,然后选取性能最大所对应的排斥半径和飞行高度取值作为最优的排斥区域半径和最优的无人机飞行高度。
[0136]
给出一个示例作为参考,其中在此示例中基站可以从用户、无人机和网络侧获得一些系统参数如下:地面基站的密度和发射功率分别为λ
g
=10
‑5和μ
g
=40;虚拟无人机的密度和发射功率分别为和μ
u
=1;无人机的主瓣增益、旁瓣增益和半功率波束宽度分别为g
m
=10,g
s
=1和无人机允许飞行的最小和最大高度分别为h
m
=50和h
m
=300;nlos和los的路损指数分别为α
n
=4和α
l
=2.5;空对地链路的概率视距传输模型参数分别为a=11.95和b=0.136;三种用户的信干比门限都为1。
[0137]
此时无人机高度每隔20选取一个值,从50到160,一共n=13个无人机飞行高度,而基站排斥半径每隔20选取一个值,从20到160,一共m=8个无人机飞行高度。最终可以得到13
×
8=104组排斥半径和无人机高度的参数配置,基于sir统计分布的近似结果进行用户成功概率的性能评估后,画出如图3所示的用户成功概率的三维图,其中可以看出当无人机高度为130,排斥半径为60时,可得到最大的用户成功概率。因此,在此示例下,最优的排斥半径为60米,最优无人机高度为130米。
[0138]
步骤四:实施无人机部署方案
[0139]
步骤4.1基于所评估得到的最优排斥区域和最优高度,由地面基站反馈给无人机,控制其部署于最优排斥区域外且飞行于最优高度。
[0140]
步骤4.2地面基站把分类信息反馈给用户,用户按接收到的指令进行接入网络,其中地面中心用户与和地面基站进行通信,无人机用户和无人机进行通信以及地面边缘用户与和地面基站进行通信。
[0141]
从上述说明可以看出,本发明的无人机部署方案与现有的无人机部署方案有明显的不同。所提出的方案基于距离将干扰源直接进行物理隔离,同时在高度选取上更具有灵活性。该方案操作简单便于实际系统的实现,同时能够对中心用户和边缘用户进行有效的干扰抑制,对于用户来说是透明的,不增加用户的负担。并且本方案还给出了成功概率的界限以及近似方法,为基站侧计算最优排斥区域大小提供了快速、有效且准确的评估方法。基于成功概率可求出区域频谱效率和能效。
[0142]
以上所述实施例仅表达本发明的实施方式,但并不能因此而理解为对本发明专利的范围的限制,应当指出,对于本领域的技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1