信息处理装置、方法和程序与流程
1.本公开涉及信息处理装置、方法和程序,并且特别是涉及能够更容易地根据更多不同情况捕获图像的信息处理装置、方法和程序。
背景技术:
2.近年来,已经研究了利用诸如所谓的无人机之类的飞行体的各种系统。例如,已经设想了使飞行体在停车场中飞行并将用户引导到特定位置的方法(例如,参见专利文献1)。
3.此外,例如,已经设想了支持巡逻,例如在警察巡逻期间通过使用成像设备进行成像,以及通过使用捕获的图像进行记录和引导。
4.引用列表
5.专利文件
6.专利文献1:日本专利申请特许公开no.2017
‑
227946
技术实现要素:
7.本发明要解决的问题
8.在这样的巡逻中,会发生各种情况。因此,为了适当地支持巡逻,需要根据每种情况进行成像。但是,还没有根据各种情况进行这种成像的方法,并且难以在更多情况下适当地支持巡逻。即使采用专利文献1中描述的方法,有可能通过使飞行体飞行来将用户引导到特定位置,但是难以根据情况进行成像。
9.本公开是鉴于这样的情况而提出的,其目的在于,使成像设备能够更容易地根据更多种情况进行成像。
10.问题的解决方案
11.根据本技术的一个方面的信息处理装置是包括控制单元的信息处理装置,该控制单元被配置为基于车辆信息来控制成像设备,该车辆信息是关于车辆的信息。
12.根据本技术的一个方面的信息处理方法是用于基于车辆信息来控制成像设备的信息处理方法,该车辆信息是关于车辆的信息。
13.根据本技术的一个方面的程序是用于使计算机用作被配置为基于车辆信息来控制成像设备的控制单元的程序,该车辆信息是关于车辆的信息。
14.在根据本技术的一个方面的信息处理装置、方法和程序中,基于车辆信息来控制成像设备,该车辆信息是关于车辆的信息。
附图说明
15.图1是示出巡逻支持系统的主要配置示例的视图。
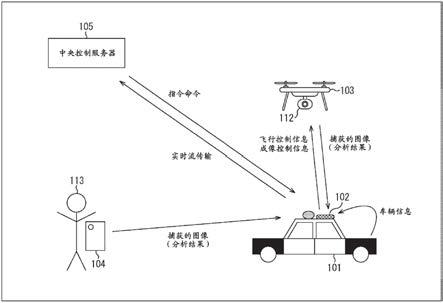
16.图2是示出设备之间交换的数据的示例的视图。
17.图3是示出巡逻车的主要配置示例的框图。
18.图4是示出基站的主要配置示例的框图。
19.图5是示出飞行体的主要配置示例的框图。
20.图6是示出终端设备的主要配置示例的框图。
21.图7是示出中央控制服务器的主要配置示例的框图。
22.图8是用于解释整个系统的控制过程的流程的示例的流程图。
23.图9是用于解释飞行体控制过程的流程的示例的流程图。
24.图10是用于解释用例1
‑
1的视图。
25.图11是用于解释用例1
‑
2的视图。
26.图12是用于解释用例2的视图。
27.图13是用于解释用例3的视图。
28.图14是用于解释用例4的视图。
29.图15是示出装在安装在汽车上的杆状安装基座上的相机的示例的视图。
30.图16是示出计算机的主要配置示例的框图。
具体实施方式
31.在下文中,将描述用于实现本公开的实施例(在下文中,被称为实施例)。注意的是,将按以下次序给出描述。
32.1.第一实施例(巡逻支持系统)
33.2.用例1
‑134.3.用例1
‑235.4.用例2
36.5.用例3
37.6.用例4
38.7.补充说明
39.<1.第一实施例>
40.<基于车辆信息的成像控制>
41.近年来,例如,如专利文献1中所描述的,已经研究了利用诸如所谓的无人机之类的飞行体的各种系统。例如,已经设想了用于使飞行体在停车场中飞行并将用户引导到特定位置的方法。
42.此外,例如,已经设想了支持巡逻,例如在警察巡逻期间通过使用成像设备进行成像,以及通过使用捕获的图像进行记录和引导。在这样的巡逻中,会发生各种情况。因此,为了适当地支持巡逻,需要根据每种情况进行成像。
43.但是,还没有根据各种情况进行这种成像的方法,并且难以在更多情况下适当地支持巡逻。即使采用专利文献1中描述的方法,有可能通过使飞行体飞行来将用户引导到特定位置,但是难以根据情况进行成像。
44.例如,可设想将具有成像设备的飞行体安装在巡逻车上,在巡逻期间使飞行体飞行以从空中捕获图像,并使用捕获的图像执行记录和引导的方法。但是,在巡逻车行驶的同时使飞行体飞行并进行成像是困难的。此外,存在需要成像的情况和即使在巡逻期间也不需要成像的情况,以及在不在巡逻时不需要成像的情况。但是,难以识别每种情况并在适当的情况下进行成像。此外,根据情况,存在应当对警察进行成像的情形、应当对巡逻车的周
围进行成像的情形等。但是,难以适当地确定什么是被摄体以及如何捕捉图像。例如,可设想操作者根据情况手动操作飞行体或成像设备,但在那种情况下,需要复杂的工作。
45.因此,要基于车辆信息来控制包括成像功能单元和成像范围可变单元的成像设备,该车辆信息是关于车辆的信息。例如,信息处理装置包括控制单元,该控制单元被配置为基于车辆信息来控制成像设备,该车辆信息是关于车辆的信息。此外,例如,程序使计算机用作被配置为基于车辆信息来控制成像设备的控制单元,该车辆信息是关于车辆的信息。这么做使得能够更容易地进行根据更多不同情况的成像。
46.<巡逻支持系统>
47.图1是示出作为本技术所应用于的信息处理系统的一个方面的巡逻支持系统的主要配置的示例的框图。图1中所示的巡逻支持系统100是通过使用获得的捕获的图像来进行成像和支持警察的巡逻的系统。如图1中所示,巡逻支持系统100包括巡逻车101、基站102、飞行体103、终端设备104和中央控制服务器105。
48.巡逻车101是警察113乘坐并且由警察113执行诸如驾驶之类的操作的车辆。巡逻车101除了用作普通车辆之外还具有警车特有的装备,诸如,例如旋转灯(也被称为红灯或灯条)和无线通信设备。此外,巡逻车101包括基站102。
49.基站102是被配置为控制飞行体103的控制设备,是用作飞行体103的起飞和着陆点的设备。基站102和飞行体103通过电缆111彼此连接,以物理地限制飞行体103的飞行范围。此外,基站102具有通信功能,并且可以与诸如巡逻车101、飞行体103、终端设备104或中央控制服务器105之类的其它设备进行通信。这些设备的通信可以采用任何方法(标准),并且可以采用无线通信、有线通信或两者。例如,基站102和飞行体103可以通过电缆111进行通信(进行有线通信),也可以不通过电缆111进行无线通信。注意的是,例如,基站102可以能够缠绕电缆111,使得电缆111不松开。换句话说,电缆111的长度可以是可变的,并且飞行体103的飞行限制范围可以是可变的。
50.飞行体103是无人飞行器,诸如所谓的无人机。飞行体103将基站102用作起飞和着陆点,并且通过电缆111在飞行限制范围内飞行。飞行体103可以自主飞行,或者可以在诸如基站102之类的其它设备的控制下(通过远程操作)飞行。
51.此外,飞行体103包括相机112并且具有成像功能。例如,飞行体103可以在飞行时通过使用相机112(成像功能单元)来捕获图像。即,飞行体103是使相机112的成像范围可变(控制成像范围)的成像范围可变单元。这种成像可以被自主执行,或者可以由诸如基站102之类的其它设备控制。在飞行时,飞行体103根据情况在巡逻期间捕捉巡逻车101、警察113等的周围的图像。捕获的图像可以被用于任何目的。例如,这个捕获的图像可以被用于控制任何其它设备,诸如巡逻车101、飞行体103和终端设备104。此外,例如,这个捕获的图像可以被用于支持巡逻活动,诸如记录和引导。
52.换句话说,相机112包括飞行体103并且具有飞行功能。即,飞行体103和相机112可以被说成是包括成像功能单元和成像范围可变单元的飞行体(飞行器),也可以被说成是包括成像功能单元和成像范围可变单元的成像设备。
53.终端设备104是由作为巡逻车101的用户(司机、乘员)的警察113携带的电子设备。例如,终端设备104可以是诸如智能电话或平板设备之类的便携式终端设备。此外,例如,终端设备104可以是手表式、眼镜式、戒指式、鞋式、口袋式、吊坠式等的可穿戴设备。终端设备
104具有成像功能,诸如相机,并且可以捕获被摄体的图像。巡逻期间警察113基本上携带这种终端设备104,并且终端设备104捕获在警察113周围的情况的图像。这个捕获的图像可以被用于任何目的。例如,这个捕获的图像可以被用于控制任何其它设备,诸如巡逻车101或飞行体103。
54.注意的是,终端设备104可以包括任何传感器以便能够检测关于警察113的信息。例如,终端设备104可以能够通过传感器检测警察113对武器或工具的使用、警察113的生物信息(诸如脉搏、心率和视线方向等)。检测到的信息(传感器信息)可以被用于任何目的。例如,这个传感器信息可以被用于控制任何其它设备,诸如巡逻车101或飞行体103。
55.中央控制服务器105是管理巡逻支持系统100的服务器。上文描述的巡逻车101至终端设备104是巡逻支持系统100中的终端侧的设备(本地设备)。另一方面,中央控制服务器105是服务器侧设备,并且管理和控制例如巡逻车101到终端设备104。
56.中央控制服务器105可以具有任何配置,并且可以是例如在诸如控制中心之类的中央管理设施中提供的信息处理装置,或者可以是未指定其配置的信息处理装置,如所谓的云服务器。
57.中央控制服务器105经由网络114通信连接到基站102,并且与基站102通信以控制基站102,从基站102获取信息,并经由基站102与其它设备通信。当然,中央控制服务器105也可以经由网络114可通信地连接到巡逻车101、飞行体103和终端设备104,以能够无需经由基站102即可与这些设备通信。注意的是,这种通信可以采用任何方法(标准),并且可以采用无线通信、有线通信或两者。
58.网络114是任何网络,诸如,例如互联网或局域网。网络114包括以有线或无线方式或以两种方式配置的一个或多个网络。巡逻车101到终端设备104通过例如无线通信连接到网络114。此外,中央控制服务器105通过有线通信、无线通信或两者连接到网络114。
59.注意的是,图1示出了一辆巡逻车101到一个中央控制服务器105,但是在巡逻支持系统100中可以包括任意数量的各个设备。各个设备的数量可以是单数或复数。此外,各个设备的数量可以不同。
60.例如,可以为一辆巡逻车101提供多个基站102。此外,例如,可以为一个基站102提供多个飞行体103。即,多个飞行体103可以使用相同的基站102作为起飞和着陆点。换句话说,一个基站102可以能够控制多个飞行体103。
61.此外,可以为一辆巡逻车101提供多个终端设备104。例如,多个警察113可以是一辆巡逻车101中的乘员,多个警察113中的每一个都可以携带终端设备104。此外,一个警察113可以携带多个终端设备104。
62.此外,可以为一个中央控制服务器105提供多个本地设备。即,可以为一个中央控制服务器105提供多辆巡逻车101(以及基站102和终端设备104)。在那种情况下,中央控制服务器105与每个巡逻车101的基站102或其它本地设备通信。此外,多个中央控制服务器105可以被设置在巡逻支持系统100中。在这种情况下,中央控制服务器105可以各自与相互不同的本地设备通信,或者多个中央控制服务器105可以彼此与同一个本地设备通信。此外,多个中央控制服务器105可以共享多个过程或协同执行一个过程。
63.<支持内容>
64.接着,将描述由巡逻支持系统100执行的支持的内容。巡逻支持系统100可以执行
任何与巡逻支持相关的过程。例如,巡逻支持系统100可以执行:关于周围环境的信息的收集和记录;警告(异常或可疑人员的出现等的检测);向警察113的信息通知(调查信息的通知、危险发生时的警告、指导等);以及对警察113的行为的监视和记录。
65.<车辆信息>
66.接下来,将参考图2来描述上述各个设备之间交换的信息。如图2所示,巡逻车101向基站102提供车辆信息。
67.<车辆位置和姿态信息>
68.车辆信息是关于车辆(巡逻车101)的信息,并且可以具有任何内容,只要它与车辆相关即可。例如,车辆信息可以包括车辆位置和姿态信息,该车辆位置和姿态信息是关于车辆的位置和姿态的信息。车辆位置和姿态信息可以具有任何内容,只要它与车辆的位置和姿态相关即可。
69.例如,车辆位置和姿态信息可以包括通过接收从全球定位系统(gps)卫星等发送的信号而测得的指示巡逻车101的位置的信息。此外,车辆位置和姿态信息可以包括使用角速度传感器(也被称为陀螺仪或陀螺仪传感器)测得的指示巡逻车101的位置和朝向(姿态)的信息。而且,车辆位置和姿态信息可以包括基于加速器、制动器、方向盘等的操作(驾驶动作)导出的指示巡逻车101的位置和朝向(姿态)的信息。
70.<车辆速度信息>
71.此外,例如,车辆信息可以包括车辆速度信息,该车辆速度信息是关于车辆的速度的信息。车辆速度信息可以具有任何内容,只要它与车辆的速度相关即可。
72.例如,车辆速度信息可以包括由巡逻车101的速度计测得的指示巡逻车101的速度的信息(从车轮的角速度等导出的信息)。此外,车辆速度信息可以包括指示使用角速度传感器(也被称为陀螺仪或陀螺仪传感器)测得的巡逻车101的速度的信息。
73.<车辆操作信息>
74.而且,例如,车辆信息可以包括车辆操作信息,该车辆操作信息是关于用户(驾驶员等)对车辆的操作(对作为车辆的装备的操作)的信息。车辆操作信息可以具有任何内容,只要它与对车辆的操作相关即可。例如,车辆操作信息可以包括指示巡逻车101的发动机的状态(即,发动机是否被驱动等)的信息(或指示点火钥匙(发动机钥匙)的状态(on/off/acc(辅助电源)等的信息)。
75.此外,车辆操作信息可以包括指示巡逻车101的门的打开/关闭状态的信息。而且,车辆操作信息可以包括指示巡逻车101的加速器开度(节气门(throttle)开度)的信息。此外,车辆操作信息可以包括指示巡逻车101的制动踏板、驻车制动器等的状态(操作状态)的信息。而且,车辆操作信息可以包括指示方向盘、换档杆等的状态(操作状态)的信息。
76.此外,车辆操作信息可以包括指示巡逻车101的方向指示器、雨刮器等的状态的信息(或指示这些的开关(操作单元)的操作状况的信息)。而且,车辆操作信息可以包括指示巡逻车101的照明的状态(打开/关闭等)的信息(或指示灯开关(操作单元)的操作状况的信息)。当然,车辆操作信息也可以包括指示对巡逻车101的作为车辆的装备的其它操作的信息。
77.<车辆附属装备信息>
78.而且,例如,车辆信息可以包括车辆附属装备信息,该车辆附属装备信息是关于车
辆附属装备的信息。车辆附属装备信息可以具有任何内容,只要它与车辆附属装备相关即可。例如,车辆附属装备信息可以包括关于安装在巡逻车101中的装备的信息。此外,该装备可以是作为警车的附属装备。即,车辆附属装备信息可以包括关于作为警车的附属装备的信息(警察装备信息)。
79.例如,车辆附属装备信息可以包括指示巡逻车101的旋转灯(红灯或灯条)的状态(打开/关闭等)的信息(或指示旋转灯的操作单元的操作状况的信息)。此外,车辆附属装备信息可以包括指示巡逻车101的警报器和扬声器的使用状况(未使用、正在使用、最近使用过等)的信息(或指示警报器或扬声器的操作单元的操作状况的信息)。而且,车辆附属装备信息可以包括指示巡逻车101的无线通信设备的使用状况(未使用、正在使用、最近使用过等)的信息(或指示无线通信设备的操作单元的操作状况的信息)。
80.此外,车辆附属装备信息可以包括指示可附接于巡逻车101和可从巡逻车101分离的装备的使用状况(是否从巡逻车101去掉等)的信息。例如,安装在巡逻车101的预定位置(例如,后备箱等)处的武器(枪、警棍等)、工具(手电筒、标牌等)等的使用状况(是否从预定姿态移除等),检测结果可以由传感器等检测并包括在车辆附属装备信息中。
81.当然,巡逻车101可以向基站102供应车辆信息以外的任何信息。
82.<环境信息(飞行体)>
83.此外,如图2中所示,飞行体103可以将通过相机112成像生成的捕获的图像作为环境信息供应给基站102。例如,相机112可以捕获警察113和巡逻车101的周围的图像以生成捕获的图像(也被称为飞行体捕获的图像),并且飞行体103可以向基站102供应飞行体捕获的图像作为环境信息,该环境信息是关于巡逻车101的周围的信息。注意的是,相机112(或飞行体103)可以针对期望的事项分析飞行体捕获的图像,并且飞行体103可以将分析结果代替飞行体捕获的图像作为环境信息供应给基站102。
84.注意的是,飞行体103可以通过使用麦克风(未示出)等收集巡逻车101和警察113周围的声音,并将声音信息作为环境信息供应给基站102。
85.当然,飞行体103(相机112)可以向基站102供应环境信息以外的任何信息。
86.<环境信息(终端设备)>
87.此外,如图2中所示,终端设备104可以将终端设备104(不同于相机112的其它设备)通过成像生成的捕获的图像作为环境信息供应给基站102。例如,终端设备104可以捕获警察113周围的图像以生成捕获的图像(也被称为终端捕获的图像),并将终端捕获的图像作为环境信息供应给基站102。注意的是,终端设备104可以针对期望的事项分析终端捕获的图像,并将分析结果作为环境信息供应给基站102,代替终端捕获的图像。
88.注意的是,终端设备104收集终端设备104周围的声音(即,警察113周围的声音),并将声音信息作为环境信息供应给基站102。
89.此外,终端设备104可以通过使用传感器等来检测警察113对武器的使用、警察113的预定行为、警察113的生物信息等,并将检测到的信息供应给基站102作为环境信息。
90.当然,终端设备104可以向基站102供应环境信息以外的任何信息。
91.<指令命令>
92.此外,如图2中所示,中央控制服务器105可以将中央控制服务器105中生成的指令命令作为环境信息供应给基站102。指令命令可以具有任何内容。例如,可以包括针对基站
102的指令命令(控制信息),可以包括针对飞行体103(或相机112)的指令命令(控制信息),可以包括针对巡逻车101的指令命令(控制信息),并且可以包括针对终端设备104(或警察113)的指令命令(控制信息)。
93.当然,中央控制服务器105可以向基站102供应指令命令以外的任何信息。
94.<成像控制信息>
95.此外,如图2中所示,基站102向飞行体103(相机112)供应用于控制相机112对被摄体的成像的成像控制信息。基站102基于从巡逻车101供应的车辆信息生成这个成像控制信息。飞行体103(相机112)基于这个成像控制信息用相机112捕获被摄体的图像。即,基站102基于车辆信息控制相机112对被摄体的成像。
96.注意的是,基站102可以进一步基于从其它设备供应的环境信息来生成成像控制信息。即,基站102可以基于车辆信息和环境信息来控制相机112对被摄体的成像。
97.成像控制信息可以具有任何内容,只要它与相机112的成像的控制相关即可。例如,成像控制信息可以包括指示成像的视角(变焦(广角/窄角)、摇摄、倾斜等)的信息。而且,成像控制信息可以包括指示成像开始或结束的信息。此外,成像控制信息可以包括指示通过成像生成的捕获的图像的流传输分发的开始或结束的信息。即,基站102可以基于车辆信息(或车辆信息和环境信息)控制相机112的成像的方向、成像的视角、成像的开始或结束,或通过成像生成的捕获的图像的发送(例如,流传输分发等)的开始或结束。
98.当然,成像控制信息可以包括这些以外的信息。例如,成像控制信息可以包括指示曝光的信息、指示景深的信息、指示灵敏度的信息、指示分辨率的信息、指示对生成的捕获的图像的图像处理(诸如白平衡调整和滤波处理)的信息等等。
99.以这种方式,通过基于车辆信息控制相机112对被摄体的成像,有可能更容易地根据更多样的情况进行成像。
100.<飞行控制信息>
101.此外,如图2中所示,基站102向飞行体103供应用于控制飞行体103的飞行的飞行控制信息。基站102基于从巡逻车101供应的车辆信息生成这个飞行控制信息。飞行体103基于这个飞行控制信息在空中飞行。这种飞行允许飞行体103移动相机112并控制相机112的姿态。即,基站102基于车辆信息控制飞行体103的飞行。
102.注意的是,基站102可以进一步基于从其它设备供应的环境信息来生成飞行控制信息。即,基站102可以基于车辆信息和环境信息来控制飞行体103的飞行。
103.飞行控制信息可以具有任何内容,只要它与飞行体103的飞行相关即可。例如,飞行控制信息可以包括指示飞行体103的位置的信息。此外,飞行控制信息可以包括指示飞行体103的高度(height)(飞行体103的飞行海拔高度(altitude))的信息。而且,飞行控制信息可以包括指示飞行体的朝向的信息。此外,飞行控制信息可以包括指示飞行体的倾斜的信息。而且,飞行控制信息可以包括指示飞行体的运动的信息(诸如飞行速度、飞行路径、起飞、着陆、飞行模式(周围监视、跟踪等))。当然,飞行控制信息可以包括这些以外的信息。例如,可以包括用于控制螺旋桨的转速等的信息。
104.通过以这种方式基于车辆信息控制飞行体103的飞行,有可能通过提供给飞行体103的相机112更容易地根据更多的情况进行成像。
105.当然,基站102可以向飞行体103(相机112)供应成像控制信息和飞行控制信息以
外的任何信息。
106.<车辆控制信息>
107.此外,虽然未说明,但是基站102可以向巡逻车101供应用于控制巡逻车101(车辆)的车辆控制信息。在这种情况下,基站102基于车辆信息或基于车辆信息和环境信息生成这个车辆控制信息。基于这个车辆控制信息,巡逻车101驱动巡逻车101、巡逻车101上安装的装备等。即,基站102可以基于车辆信息或基于车辆信息和环境信息来控制巡逻车101。
108.车辆控制信息可以具有任何内容,只要它与巡逻车101的控制相关即可。例如,车辆控制信息可以包括用于执行与巡逻车101的移动相关的控制的控制信息(例如,发动机的起动/停止的控制,加速器、制动器、方向盘、换档杆等的操作单元的控制,巡逻车101的位置、朝向、速度等的控制等)。此外,例如,车辆控制信息可以包括用于执行关于巡逻车101的附属装备的控制(诸如,例如旋转灯、警报器、扬声器、无线电装置等的控制)的控制信息。
109.当然,基站102可以向巡逻车101供应车辆控制信息以外的任何信息。
110.<终端控制信息>
111.此外,虽然未说明,但是基站102可以向终端设备104供应用于控制终端设备104的终端控制信息。在这种情况下,基站102基于车辆信息或基于车辆信息和环境信息生成这个终端控制信息。终端设备104基于这个终端控制信息来驱动终端设备104。即,基站102可以基于车辆信息或基于车辆信息和环境信息来控制终端设备104。
112.终端控制信息可以具有任何内容,只要它与终端设备104的控制相关即可。例如,终端控制信息可以包括用于执行与终端设备104对被摄体的成像相关的控制(例如,成像的开始和结束、分辨率、光圈、灵敏度、景深、视角(缩放、摇摄、倾斜)、朝向、图像处理(诸如白平衡调整和滤波处理)等的控制)的控制信息。
113.当然,基站102可以向终端设备104供应终端控制信息以外的任何信息。
114.<实时流传输>
115.此外,如图2中所示,基站102可以执行在飞行体103(相机112)中生成的捕获的图像向诸如中央控制服务器105之类的其它装置的流传输分发(实时流传输)。例如,在特定情况下,诸如当警察113处于危险情况时,基站102可以对由飞行体103(相机112)生成的捕获的图像执行流传输分发。然后,操作中央控制服务器105并管理(监视)警察113的行为等的操作者可以基于流传输分发中的捕获的图像向警察113等给出指令。这么做允许操作者基于流传输分发中的捕获的图像更容易地掌握警察113的情况。因此,这个操作者可以在更多样的情况下更适当地指导(支持)警察113等。
116.当然,基站102可以向中央控制服务器105供应流传输数据以外的任何信息。
117.<巡逻车>
118.接下来,将描述每个设备的配置。图3是示出作为对本技术所应用于的信息处理装置(车辆)的一方面的巡逻车101的主要配置的示例的框图。如图3中所示,巡逻车101包括车辆单元131、车辆信息生成单元132和通信单元133。
119.车辆单元131具有巡逻车101的作为车辆的配置、作为车辆的附属装备的配置、用于从这些配置获取要被包括在车辆信息中的信息的配置等。作为车辆的配置包括作为车辆的任何配置,例如,发动机、变速器、轮胎、加速器、制动系统、方向盘、座椅、灯、车身等。作为车辆的附属装备的配置包括作为车辆的附属装备的任何配置,诸如:在巡逻车101中提供的
任何装备,诸如例如旋转灯、警报器、扬声器、无线通信设备和汽车导航系统;以及可附接于巡逻车101和可从巡逻车101分离的装备,诸如武器(枪、警棍等)和工具(手电筒、标牌等)。用于从这些配置中获取要被包括在车辆信息中的信息的配置包括例如获取车辆位置和姿态信息、车辆速度信息、车辆操作信息、车辆附属装备信息等的传感器等。
120.车辆单元131向车辆信息生成单元132供应通过配置(用于获取要被包括在车辆信息中的信息的配置)获取的信息(例如,车辆位置和姿态信息、车辆速度信息、车辆操作信息、车辆附属装备信息等)。此外,还可以基于从通信单元133供应的车辆控制信息来驱动车辆单元131。
121.车辆信息生成单元132获取从车辆单元131供应的信息,并生成包括该信息的车辆信息。车辆信息生成单元132将生成的车辆信息供应给通信单元133。
122.通信单元133具有通信接口,并经由通信接口与其它设备通信。这种通信可以采用任何方案(标准),并且可以采用无线通信、有线通信或两者。例如,通信单元133与基站102通信,并且将从车辆信息生成单元132供应的车辆信息发送到基站102。此外,通信单元133还可以与基站102通信,接收从基站102发送的车辆控制信息,并将车辆控制信息供应给车辆单元131。
123.注意的是,车辆信息生成单元132可以具有任何配置。例如,车辆信息生成单元132可以由实现上述处理的逻辑电路配置。此外,车辆信息生成单元132可以具有例如中央处理器(cpu)、只读存储器(rom)、随机存取存储器(ram)等,并通过使用它们执行程序以实现上述处理。当然,车辆信息生成单元132可以具有这两种配置,通过逻辑电路来实现上述处理的一部分,并且通过执行程序来实现其它部分。
124.此外,除了上述配置之外,车辆单元131和通信单元133还可以具有任何配置。例如,车辆单元131和通信单元133可以包括逻辑电路,该逻辑电路实现用于控制上述配置的控制过程。此外,车辆单元131和通信单元133可以具有例如cpu、rom、ram等,并通过使用它们执行程序以实现控制过程。当然,车辆单元131和通信单元133可以具有这两种配置,通过逻辑电路实现控制过程的一部分,并通过执行程序实现其它部分。
125.注意的是,各个处理单元的配置可以彼此独立,并且例如,处理单元的一部分可以通过逻辑电路来实现处理,处理单元的其它部分可以通过执行程序来实现处理,以及其它处理单元可以通过逻辑电路和程序的执行两者来实现处理。
126.<基站>
127.图4是示出作为本技术所应用于的信息处理装置的一个方面的基站102的主要配置的示例的框图。如图4中所示,基站102包括车辆信息获取单元141、环境信息获取单元142、控制单元143和通信单元144。
128.车辆信息获取单元141执行与车辆信息的获取相关的处理。例如,车辆信息获取单元141获取从通信单元144供应的巡逻车101的车辆信息。车辆信息获取单元141将获取的车辆信息供应给控制单元143。
129.环境信息获取单元142执行与环境信息的获取相关的处理。例如,环境信息获取单元142获取从通信单元144供应的环境信息(例如,从其它设备发送的捕获的图像、捕获的图像的分析结果、指令命令等)。环境信息获取单元142将获取的环境信息供应给控制单元143。
130.控制单元143执行与成像设备(包括相机112的飞行体103)的控制相关的处理。例如,控制单元143获取从车辆信息获取单元141供应的车辆信息。此外,控制单元143获取从环境信息获取单元142供应的环境信息。此外,控制单元143基于获取的车辆信息或基于获取的车辆信息和环境信息来控制成像设备(包括相机112的飞行体103)。
131.例如,控制单元143包括成像控制单元152。成像控制单元152执行与相机112对被摄体的成像的控制相关的处理。例如,成像控制单元152基于车辆信息或基于车辆信息和环境信息生成成像控制信息。此外,成像控制单元152将生成的成像控制信息供应给通信单元144,并使通信单元144向飞行体103(相机112)发送。根据这个成像控制信息,飞行体103(相机112)被驱动。即,成像控制单元152基于车辆信息或基于车辆信息和环境信息来控制相机112对被摄体的成像。
132.此外,控制单元143可以包括飞行控制单元151。飞行控制单元151执行与飞行体103的飞行的控制相关的处理。例如,飞行控制单元151基于车辆信息或基于车辆信息和环境信息生成飞行控制信息。此外,飞行控制单元151将生成的飞行控制信息供应给通信单元144,并使通信单元144向飞行体103发送。根据这个飞行控制信息,飞行体103被驱动。即,飞行控制单元151基于车辆信息或基于车辆信息和环境信息来控制飞行体103的飞行。
133.此外,控制单元143可以包括车辆控制单元153。车辆控制单元153执行与作为车辆的巡逻车101的控制相关的处理。例如,车辆控制单元153基于车辆信息或基于车辆信息和环境信息生成车辆控制信息。此外,车辆控制单元153将生成的车辆控制信息供应给通信单元144,并使通信单元144向巡逻车101发送。根据这个车辆控制信息,巡逻车101被驱动。即,车辆控制单元153基于车辆信息或基于车辆信息和环境信息来控制作为车辆的巡逻车101。
134.此外,控制单元143可以包括终端控制单元154。终端控制单元154执行与终端设备104的控制相关的处理。例如,终端控制单元154基于车辆信息或基于车辆信息和环境信息生成终端控制信息。此外,终端控制单元154将生成的终端控制信息供应给通信单元144,并使通信单元144向终端设备104发送。根据这个终端控制信息,终端设备104被驱动,并且例如通过使用传感器来进行成像或检测预定信息。即,终端控制单元154基于车辆信息或基于车辆信息和环境信息来控制终端设备104。
135.此外,控制单元143可以包括服务器处理单元155。服务器处理单元155对中央控制服务器105执行处理。例如,服务器处理单元155通过通信单元144与中央控制服务器105交换信息。例如,服务器处理单元155从通信单元144获取从中央控制服务器105发送并由通信单元144接收的环境信息(指令命令)。服务器处理单元155将获取的环境信息(指令命令)供应给终端控制单元154到飞行控制单元151当中的与指令命令对应的处理单元。此外,例如,服务器处理单元155从通信单元144获取从飞行体103(相机112)发送并由通信单元144接收的捕获的图像的流传输数据。服务器处理单元155将获取的流传输数据供应给通信单元144,并使通信单元144向中央控制服务器105发送(执行捕获的图像向中央控制服务器105的流传输分发)。
136.通信单元144具有通信接口,并且经由通信接口与其它设备通信。这种通信可以采用任何方案(标准),并且可以采用无线通信、有线通信或两者。
137.例如,通信单元144与巡逻车101(通信单元133)通信,并接收从巡逻车101发送的车辆信息。通信单元144将车辆信息供应给车辆信息获取单元141。此外,通信单元144可以
与飞行体103(稍后要描述的通信单元165)通信,以接收从飞行体103发送的环境信息(诸如捕获的图像)。而且,通信单元144可以与终端设备104(稍后要描述的通信单元175)通信,以接收从终端设备104发送的环境信息(捕获的图像等)。此外,通信单元144可以与中央控制服务器105(稍后要描述的通信单元183)通信,以接收从中央控制服务器105发送的环境信息(指令命令等)。通信单元144将接收到的环境信息供应给环境信息获取单元142。
138.此外,例如,通信单元144与飞行体103(通信单元165)通信,并且将从控制单元143(成像控制单元152)供应的成像控制信息发送到飞行体103(通信单元165)。此外,通信单元144可以与飞行体103通信,以将从控制单元143(飞行控制单元151)供应的飞行控制信息发送到飞行体103。
139.此外,通信单元144可以与巡逻车101(通信单元133)通信,以将从控制单元143(车辆控制单元153)供应的车辆控制信息发送到巡逻车101。而且,通信单元144可以与终端设备104通信,以将从控制单元143(终端控制单元154)供应的终端控制信息发送到终端设备104(通信单元175)。此外,通信单元144可以与中央控制服务器105(通信单元183)通信,以将从控制单元143(服务器处理单元155)供应的流传输数据发送到中央控制服务器105。
140.注意的是,车辆信息获取单元141到控制单元143的每个处理单元可以具有任何配置。例如,每个处理单元可以由实现上述处理的逻辑电路配置。此外,处理单元中的每一个可以包括例如cpu、rom、ram等,并通过使用它们执行程序以实现上述处理。当然,每个处理单元可以具有两种配置,通过逻辑电路实现上述处理的一部分,并且通过执行程序实现其它部分。
141.此外,除了上述通信接口之外,通信单元144还可以具有任何配置。例如,通信单元144可以包括逻辑电路,该逻辑电路实现用于控制上述通信接口的控制过程。此外,通信单元144可以具有例如cpu、rom、ram等,并且通过使用它们执行程序以实现控制过程。当然,通信单元144可以具有这两种配置,通过逻辑电路实现控制过程的一部分,并且通过执行程序实现其它部分。
142.注意的是,各个处理单元(车辆信息获取单元141到通信单元144)的配置可以彼此独立,例如,处理单元的一部分可以通过逻辑电路来实现处理,处理单元的其它部分可以通过执行程序来实现处理,以及其它处理单元可以通过逻辑电路和程序的执行两者来实现处理。
143.注意的是,在不使用环境信息的情况下,可以省略环境信息获取单元142。此外,在控制单元143不控制飞行体103的飞行的情况下,可以省略飞行控制单元151。而且,在控制单元143不控制巡逻车101的情况下,可以省略车辆控制单元153。此外,在控制单元143不控制终端设备104的情况下,可以省略终端控制单元154。而且,在控制单元143不与中央控制服务器105交换信息的情况下,可以省略服务器处理单元155。
144.<飞行体>
145.图5是示出飞行体103的主要配置的示例的框图,飞行体103是本技术所应用于的成像设备(或移动体)的一个方面。如图5中所示,飞行体103具有飞行单元161、成像单元162、环境信息生成单元163、流传输处理单元164和通信单元165。
146.飞行单元161具有与飞行体103的飞行相关的配置,并且执行与飞行体103的飞行相关的处理。与飞行相关的配置包括例如螺旋桨、马达、被配置为控制这些的控制单元等。
例如,飞行单元161驱动这些配置以使飞行体103飞行。此外,飞行单元161具有用于从与飞行相关的配置中获取要被包括在环境信息中的信息的配置。要被包括在环境信息中的信息包括例如关于飞行的信息,诸如飞行体103的位置、姿态(朝向、倾斜度等)、速度和螺旋桨的转速。此外,可以包括关于飞行体103的周围的信息,诸如温度和风速。
147.此外,这种用于获取要被包括在环境信息中的信息的配置可以包括用于获取关于飞行的信息的配置,诸如例如被配置为通过使用gps信号等来测量飞行体103的位置的定位单元、被配置为检测姿态和速度的陀螺仪传感器以及被配置为检测螺旋桨的转速的传感器。此外,可以包括用于获取关于飞行体103的周围的信息的配置,诸如温度传感器和风速传感器。而且,可以包括被配置为控制这些传感器等的控制单元。
148.飞行单元161获取从通信单元165供应的飞行控制信息(从基站102发送的飞行控制信息)。飞行单元161根据获取的飞行控制信息使飞行体103飞行。此外,飞行单元161获取要包括在环境信息中的信息,并将该信息供应给环境信息生成单元163。
149.成像单元162包括例如相机112和被配置为控制相机112的驱动和姿态(朝向、倾斜度等)的控制单元,并且执行与被摄体的成像相关的处理。例如,成像单元162获取从通信单元165供应的成像控制信息(从基站102发送的成像控制信息)。成像单元162根据获取的成像控制信息通过使用相机112来捕获被摄体的图像。
150.例如,成像单元162根据成像控制信息来设置与成像相关的参数(曝光、定时、快门速度、成像位置、成像方向、视角、图像处理等),并且进行成像以生成捕获的图像。成像单元162将生成的捕获的图像作为要被包括在环境信息中的信息供应给环境信息生成单元163。此外,成像单元162可以针对预定信息分析生成的捕获的图像,并将分析结果作为要被包括在环境信息中的信息供应给环境信息生成单元163。而且,成像单元162可以将生成的捕获的图像供应给流传输处理单元164。
151.环境信息生成单元163执行与环境信息的生成相关的处理。例如,环境信息生成单元163获取从成像单元162供应的捕获的图像(或其分析结果)。环境信息生成单元163生成包括捕获的图像(或其分析结果)的环境信息,并将生成的环境信息供应给通信单元165。此外,例如,环境信息生成单元163获取从飞行单元161供应的关于飞行的信息作为要被包括在环境信息中的信息。此外,环境信息生成单元163获取从飞行单元161供应的关于飞行体103的周围的信息作为要被包括在环境信息中的信息。环境信息生成单元163生成包括这些条信息的环境信息,并将生成的环境信息供应给通信单元165。
152.流传输处理单元164执行与捕获的图像的流传输分发相关的处理。例如,流传输处理单元164获取从成像单元162供应的捕获的图像(飞行体捕获的图像)。流传输处理单元164将飞行体捕获的图像作为流传输数据供应给通信单元165。
153.通信单元165具有通信接口,并经由通信接口与其它设备通信。这种通信可以采用任何方案(标准),可以采用无线通信、有线通信或两者。
154.例如,通信单元165与基站102(通信单元144)通信,以接收从基站102发送的成像控制信息。通信单元165将接收到的成像控制信息供应给成像单元162。因此,成像单元162可以基于成像控制信息进行成像。
155.此外,通信单元165可以与基站102(通信单元144)通信,以接收从基站102发送的飞行控制信息。在这种情况下,通信单元165将接收到的飞行控制信息供应给飞行单元161。
因此,飞行单元161可以基于飞行控制信息飞行。
156.此外,通信单元165可以获取从环境信息生成单元163供应的环境信息,与基站102(通信单元144)通信,并将环境信息发送到基站102。而且,通信单元165可以获取从流传输处理单元164供应的流传输数据(飞行体捕获的图像),与基站102(通信单元144)通信,并将流传输数据发送到基站102。
157.注意的是,环境信息生成单元163和流传输处理单元164中的每个处理单元可以具有任何配置。例如,每个处理单元可以由实现上述处理的逻辑电路配置。此外,处理单元中的每一个可以包括例如cpu、rom、ram等,并通过使用它们执行程序以实现上述处理。当然,每个处理单元可以同时具有两种配置,通过逻辑电路实现上述处理的一部分,并且通过执行程序实现其它部分。
158.此外,除了上述配置之外,飞行单元161、成像单元162和通信单元165中的每个处理单元还可以具有任何配置。例如,每个处理单元可以包括实现用于控制上述配置的控制过程的逻辑电路。此外,每个处理单元可以具有例如cpu、rom、ram等,并通过它们执行程序以实现控制过程。当然,每个处理单元可以同时具有两种配置,通过逻辑电路实现控制过程的一部分,并且通过执行程序实现其它部分。
159.注意的是,各个处理单元的配置可以彼此独立,并且例如,处理单元的一部分可以通过逻辑电路来实现处理,处理单元的另一部分可以通过执行程序来实现处理,以及其它处理单元可以通过逻辑电路和程序的执行两者来实现处理。
160.注意的是,在飞行体103不输出环境信息的情况下,可以省略环境信息生成单元163。此外,在不执行捕获的图像的流传输分发的情况下,可以省略流传输处理单元164。
161.<终端设备>
162.图6是示出作为本技术所应用于的信息处理装置的一个方面的终端设备104的主要配置的示例的框图。如图6中所示,终端设备104包括成像单元171、传感器单元172、流传输处理单元173、环境信息生成单元174和通信单元175。
163.成像单元171执行与被摄体的成像相关的处理。例如,成像单元171设置与成像相关的参数(曝光、定时、快门速度、成像位置、成像方向、视角、图像处理等),并且捕获被摄体的图像以生成捕获的图像。此外,成像单元171将捕获的图像作为要被包括在环境信息中的信息供应给环境信息生成单元174。注意的是,成像单元171可以针对预定信息分析生成的捕获的图像,并将分析结果作为要被包括在环境信息中的信息供应给环境信息生成单元174。而且,成像单元171可以将生成的捕获的图像供应给流传输处理单元173。
164.此外,例如,成像单元171可以获取从通信单元175供应的终端控制信息(从基站102发送的终端控制信息)。然后,成像单元171可以基于终端控制信息执行上述处理(成像等)。
165.传感器单元172包括传感器、被配置为控制传感器的控制单元等,并且执行与信息检测相关的处理。这个传感器可以检测任何信息。例如,这个传感器可以是被配置为检测在警察113周围的状态的传感器(诸如麦克风、温度传感器、湿度传感器、亮度传感器或红外线的不可见光传感器等),可以是被配置为检测终端设备104的姿态和运动的传感器(诸如陀螺仪传感器),或者可以是被配置为检测警察113的生物信息(诸如心率、脉搏和视线方向)的传感器。此外,传感器单元172中可以包括任意数量的传感器。该数量可以是单数或复数。
此外,传感器单元172可以包括检测不同类型的信息的多个传感器。当然,一个传感器可以能够检测多种类型的信息。
166.传感器单元172将使用这种传感器检测到的信息(传感器信息)供应给环境信息生成单元174作为要被包括在环境信息中的信息。注意的是,例如,传感器单元172可以获取从通信单元175供应的终端控制信息(从基站102发送的终端控制信息)。然后,传感器单元172可以基于终端控制信息执行上述处理(信息检测等)。
167.流传输处理单元173执行与由成像单元171生成的捕获的图像(终端捕获的图像)的流传输分发相关的处理。例如,流传输处理单元173获取从成像单元171供应的捕获的图像。流传输处理单元173将捕获的图像作为流传输数据供应给通信单元175。
168.环境信息生成单元174执行与环境信息的生成相关的处理。例如,环境信息生成单元174获取从成像单元171供应的终端捕获的图像(或其分析结果)。环境信息生成单元174生成包括终端捕获的图像(或其分析结果)的环境信息,并将生成的环境信息供应给通信单元175。此外,例如,环境信息生成单元174获取从传感器单元172供应的传感器信息作为要被包括在环境信息中的信息。环境信息生成单元174生成包括传感器信息的环境信息,并将生成的环境信息供应给通信单元175。
169.通信单元175具有通信接口,并且经由通信接口与其它设备通信。这种通信可以采用任何方案(标准),并且可以采用无线通信、有线通信或两者。
170.例如,通信单元175获取从环境信息生成单元174供应的环境信息,与基站102(通信单元144)通信,并将环境信息发送到基站102。此外,通信单元175获取从流传输处理单元173供应的流传输数据,与基站102(通信单元144)通信,并将流传输数据发送到基站102。
171.而且,通信单元175与基站102(通信单元144)通信,以接收从基站102发送的终端控制信息。通信单元175将接收到的终端控制信息供应给成像单元171和传感器单元172。因此,成像单元171和传感器单元172可以基于终端控制信息进行成像。
172.注意的是,流传输处理单元173和环境信息生成单元174的每个处理单元可以具有任何配置。例如,每个处理单元可以由实现上述处理的逻辑电路配置。此外,处理单元中的每一个可以包括例如cpu、rom、ram等,并通过使用它们执行程序以实现上述处理。当然,每个处理单元可以具有两种配置,通过逻辑电路实现上述处理的一部分,并且通过执行程序实现其它部分。
173.此外,除了上述配置之外,成像单元171、传感器单元172和通信单元175中的每个处理单元还可以具有任何配置。例如,每个处理单元可以包括实现用于控制上述配置的控制过程的逻辑电路。此外,每个处理单元可以具有例如cpu、rom、ram等,并通过它们执行程序以实现控制过程。当然,每个处理单元可以具有两种配置,通过逻辑电路实现控制过程的一部分,并且通过执行程序实现其它部分。
174.注意的是,各个处理单元的配置可以彼此独立,并且例如,处理单元的一部分可以通过逻辑电路来实现处理,处理单元的另一部分可以通过执行程序来实现处理,以及其它处理单元可以通过逻辑电路和程序的执行两者来实现处理。
175.注意的是,在终端设备104不输出环境信息的情况下,可以省略环境信息生成单元174。此外,在不执行捕获的图像的流传输分发的情况下,可以省略流传输处理单元173。
176.<中央控制服务器>
177.图7是示出作为本技术所应用于的信息处理装置的一个方面的中央控制服务器105的主要配置的示例的框图。如图7中所示,中央控制服务器105包括指令命令生成单元181、流传输处理单元182和通信单元183。
178.指令命令生成单元181执行与针对巡逻支持系统100的其它设备的指令命令的生成相关的处理。指令命令生成单元181接收例如用户(操作者)对用户界面(未示出)的操作,并基于用户操作等生成指令命令。指令命令生成单元181向通信单元183供应生成的指令命令作为环境信息。
179.通信单元183具有通信接口,并且经由通信接口与其它设备通信。这种通信可以采用任何方案(标准),并且可以采用无线通信、有线通信或两者。
180.例如,通信单元183获取从指令命令生成单元181供应的环境信息(包括指令命令),并与基站102(通信单元144)通信,并将环境信息(指令命令)发送给基站102。此外,通信单元183接收从基站102发送的流传输数据,并将流传输数据供应给流传输处理单元182。
181.而且,流传输处理单元182获取从通信单元183供应的流传输数据,并且再现和显示流传输数据。因此,操作者可以在流传输分发中查看捕获的图像。因此,操作者可以更容易地掌握在巡逻车101和警察113周围的情况。因此,可以根据情况执行更合适的指令命令。
182.注意的是,指令命令生成单元181和流传输处理单元182中的每个处理单元可以具有任何配置。例如,每个处理单元可以由实现上述处理的逻辑电路配置。此外,处理单元中的每一个可以包括例如cpu、rom、ram等,并通过使用它们执行程序以实现上述处理。当然,每个处理单元可以具有两种配置,通过逻辑电路实现上述处理的一部分,并且通过执行程序实现其它部分。
183.此外,除了上述配置之外,通信单元183还可以单独具有任何配置。例如,通信单元183可以包括实现用于控制上述配置的控制过程的逻辑电路。此外,每个处理单元可以具有例如cpu、rom、ram等,并通过它们执行程序以实现控制过程。当然,每个处理单元可以具有两种配置,通过逻辑电路实现控制过程的一部分,并且通过执行程序实现其它部分。
184.注意的是,各个处理单元的配置可以彼此独立,并且例如,处理单元的一部分可以通过逻辑电路来实现处理,处理单元的另一部分可以通过执行程序来实现处理,以及其它处理单元可以通过逻辑电路和程序的执行两者来实现处理。
185.注意的是,在不执行捕获的图像的流传输分发的情况下,可以省略流传输处理单元182。
186.每个设备都具有上述配置并执行上述处理,这使得有可能根据更多不同情况容易地进行成像。
187.<系统控制过程的流程>
188.接下来,将参考图8的流程图描述由巡逻支持系统100的每个设备执行的控制过程的流程的示例。
189.当控制过程开始时,巡逻车101的车辆信息生成单元132在步骤s111中生成包括从车辆单元131供应的信息的车辆信息。然后,通信单元133将车辆信息供应给基站102。在步骤s101中,基站102的通信单元144获取车辆信息。
190.此外,在步骤s121中,终端设备104的环境信息生成单元174生成包括终端捕获的图像的环境信息。然后,通信单元175将环境信息供应给基站102。在步骤s102中,基站102的
通信单元144获取环境信息。
191.此外,在步骤s141中,飞行体103的环境信息生成单元163生成包括飞行体捕获的图像的环境信息。然后,通信单元165将环境信息供应给基站102。在步骤s103中,基站102的通信单元144获取环境信息。
192.此外,在步骤s131中,中央控制服务器105的指令命令生成单元181生成指令命令(包括环境信息)。然后,通信单元183向基站102供应指令命令。在步骤s104中,基站102的通信单元144获取环境信息(指令命令)。
193.在步骤s105中,基站102的控制单元143通过适当地使用在步骤s101至s104中获取的信息来生成控制信息。例如,成像控制单元152通过适当地使用供应的车辆信息和环境信息来生成成像控制信息。此外,例如,飞行控制单元151通过适当地使用供应的车辆信息和环境信息来生成飞行控制信息。
194.注意的是,在步骤s105中,车辆控制单元153可以通过适当地使用供应的车辆信息和环境信息来生成车辆控制信息。此外,终端控制单元154可以通过适当地使用供应的车辆信息和环境信息来生成终端控制信息。
195.在步骤s106中,基站102的通信单元144向飞行体103发送控制信息,诸如在步骤s105中生成的成像控制信息和车辆控制信息。
196.在步骤s142中,飞行体103的通信单元165获取控制信息(诸如成像控制信息和车辆控制信息)。飞行体103的飞行单元161根据飞行控制信息执行飞行。此外,飞行体103的成像单元162根据成像控制信息捕获被摄体的图像。
197.以这种方式,通过基于车辆信息控制飞行体103(相机112)的成像和飞行,可以更容易地执行根据更多不同情况的成像。
198.注意的是,在步骤s105中生成车辆控制信息的情况下,通信单元144可以在步骤s106中将车辆控制信息发送到巡逻车101的通信单元133。在那种情况下,根据由通信单元133获取的车辆控制信息,车辆单元131被驱动。
199.此外,在步骤s105中生成终端控制信息的情况下,通信单元144可以在步骤s106中将终端控制信息发送到终端设备104的通信单元175。在那种情况下,成像单元171和传感器单元172根据由通信单元175获取的终端控制信息执行处理。
200.<飞行体控制过程的流程>
201.接下来,例如,将参考图9中的流程图描述在图8中的步骤s105等中由基站102执行的飞行体控制过程的流程的示例。
202.当飞行体控制过程开始时,在步骤s201中,车辆信息获取单元141经由通信单元144获取从巡逻车101发送的车辆信息。
203.在步骤s202中,环境信息获取单元142经由通信单元144获取从飞行体103和终端设备104发送的环境信息。
204.在步骤s203中,飞行控制单元151基于在步骤s201中获取的车辆信息,或者基于车辆信息和在步骤s202中获取的环境信息,生成飞行控制信息。
205.在步骤s204中,通信单元144将在步骤s203中生成的飞行控制信息发送到飞行体103。飞行体103根据飞行控制信息飞行。即,基站102的飞行控制单元151基于车辆信息或基于车辆信息和环境信息来控制飞行体103的飞行。
206.此外,在步骤s205中,成像控制单元152基于在步骤s201中获取的车辆信息或者基于车辆信息和在步骤s202中获取的环境信息来生成成像控制信息。
207.在步骤s206中,通信单元144将在步骤s205中生成的成像控制信息发送到飞行体103(相机112)。飞行体103根据成像控制信息捕获被摄体的图像。即,基站102的成像控制单元152基于车辆信息或基于车辆信息和环境信息来控制相机112对被摄体的成像。
208.当步骤s206的过程结束时,飞行体控制过程结束。以这种方式执行每个过程使得能够更容易地执行根据更多不同情况的成像。
209.<2.用例1
‑
1(着陆控制)>
210.接下来,将描述基于车辆信息等控制飞行体103和相机112的方法的具体示例。例如,如图10中所示,在初始状态下,假设的是巡逻车101停止并且飞行体103在空中飞行。在这种状态下,基站102基于巡逻车101起动前后的动作、情况等控制飞行体103着陆在基站102上。
211.在这种着陆控制中,在巡逻车101起动(从0km/h加速)时,基站102可以控制飞行体103着陆在基站102上。在这种情况下,当基站102例如基于车辆信息中包括的车辆速度信息检测到巡逻车101起动时,,基站102生成用于使飞行体103着陆在基站102(预定位置)上的飞行控制信息,并且向飞行体103发送飞行控制信息。根据飞行控制信息,飞行体103着陆在基站102上。
212.此外,在起动的巡逻车101加速达到预定速度(例如,10km/h等)时,基站102可以控制飞行体103着陆在基站102上。在这种情况下,当基站102例如基于车辆信息中包括的车辆速度信息检测到巡逻车101的速度已经达到预定速度时,基站102生成用于使飞行体103着陆在基站102(预定位置)上的飞行控制信息,并将飞行控制信息发送到飞行体103。根据飞行控制信息,飞行体103着陆在基站102上。
213.而且,在巡逻车101中的警察113等执行预定的起动准备动作(起动前)时,基站102可以控制飞行体103着陆在基站102上。这个起动准备动作可以是任何动作。例如,起动准备操作可以是打开和关闭巡逻车101的(驾驶座的)门、系安全带、握方向盘、打开发动机钥匙、释放制动踏板、换档杆操作、释放驻车制动器、打开旋转灯等。此外,起动准备动作可以是其它动作。此外,启动准备动作可以是多个动作的组合。例如,在车门关闭的状态下检测到方向盘操作、制动踏板的松开等的情况下,可以确定为起动准备动作。
214.在这种情况下,当基站102例如基于车辆信息中包括的车辆操作信息、车辆装备信息等检测到起动准备动作时,基站102生成用于使飞行体103着陆在基站102(预定位置)上的飞行控制信息,并将飞行控制信息发送到飞行体103。根据飞行控制信息,飞行体103着陆在基站102上。
215.注意的是,在如上所述使飞行体103着陆的情况下,基站102可以终止相机112的成像。例如,当如上所述基站102基于车辆信息检测到触发条件(诸如巡逻车101的起动、巡逻车101加速到预定速度、以及巡逻车101的起动准备动作)时,基站102向飞行体103发送飞行控制信息以使飞行体103着陆,并向飞行体103(相机112)发送成像控制信息以终止相机112的成像。
216.一般而言,飞行体103的移动速度(约10km/h至20km/h)低于巡逻车101的正常移动速度(例如,约40km/h至50km/h)。因此,在使飞行体103飞行的同时,难以以正常移动速度移
动巡逻车101。换句话说,在巡逻车101以正常移动速度移动的同时,难以使飞行体103正常飞行。即,相机112变得难以在有意义的状态下进行成像,并且即使进行成像,也很可能仅可以获得不稳定且难以用于巡逻支持的捕获的图像。即,即使在巡逻车101以正常移动速度移动的同时,使飞行体103飞行以捕获图像,对巡逻支持的贡献程度也低,相反,有可能降低安全性。此外,还存在飞行体103由于不稳定飞行而损坏的可能性。
217.因此,通过使飞行体103响应于巡逻车101的起动而如上所述着陆在基站102上,驾驶巡逻车101的警察113可以更加容易、安全并以高速移动巡逻车101。
218.注意的是,在这种情况下,可以在任何地方记录直到成像结束为止由飞行体103的相机112捕获和生成的捕获的图像。例如,基站102可以记录捕获的图像。此外,中央控制服务器105可以记录捕获的图像。而且,其它设备可以记录捕获的图像。
219.<3.用例1
‑
2(海拔高度控制)>
220.此外,例如,如图11中所示,可以根据巡逻车101的移动速度(车辆速度)控制飞行体103的飞行海拔高度(飞行体海拔高度)(即,控制相机112的海拔高度)。例如,基站102可以执行控制,使得车辆速度越高则飞行体海拔高度越低,并且车辆速度越低则飞行体海拔高度越高。
221.例如,如果车辆速度足够低(例如,大约20km/h或更低),那么有可能在使飞行体103飞行的同时移动。但是,随着车辆速度增加,飞行体103的飞行趋于变得不稳定。因此,如上所述,基站102根据车辆速度控制飞行体的飞行海拔高度,从而车辆速度越高则飞行体海拔高度越低,车辆速度越低则飞行体海拔高度越高。例如,在巡逻车101停止的情况下,基站102使飞行体103以最高海拔高度飞行,随着巡逻车101的移动速度增加,飞行体103的海拔高度降低,并且当巡逻车101的速度达到预定限制速度时,使飞行体103着陆在基站102上。注意的是,当使飞行体103着陆在基站102上时,基站102可以终止相机112的成像。
222.在这种海拔高度控制中,例如,当基站102基于车辆信息中包括的车辆速度信息检测到巡逻车101的移动速度时,基站102生成用于使飞行体103以与移动速度对应的海拔高度飞行的飞行控制信息,并且将飞行控制信息发送到飞行体103。飞行体103以由飞行控制信息指定的海拔高度飞行。
223.通过以这种方式执行海拔高度控制,巡逻支持系统100可以使飞行体103以更多不同的车辆速度(巡逻车101的移动速度)更安全地飞行(更安全地进行成像)。即,巡逻支持系统100可以在更多不同情况下更适当地执行巡逻支持。
224.注意的是,而且,飞行体103的海拔高度可以基于由相机112捕获和生成的飞行体捕获的图像(环境信息)来控制。例如,在分析飞行体捕获的图像并且检测到诸如信号或屋顶之类的障碍物的情况下,可以降低飞行海拔高度以便在飞行时避开障碍物。注意的是,这种基于飞行体捕获的图像的飞行体103的海拔高度控制可以由飞行体103(相机112)本身执行或者可以由基站102执行。
225.此外,基站102可以能够控制与成像相关的任何参数以及飞行海拔高度。例如,可以控制与成像相关的任何参数,诸如成像开始/结束、分辨率、光圈、灵敏度、景深、视角(缩放、摇摄、倾斜)、朝向、图像处理(诸如白平衡调整和滤波处理)等。
226.注意的是,在这种情况下,可以在任何地方记录直到成像结束为止的由飞行体103的相机112捕获和生成的捕获的图像。例如,基站102可以记录捕获的图像。此外,中央控制
服务器105可以记录捕获的图像。而且,其它设备可以记录捕获的图像。
227.<4.用例2(起飞控制)>
228.例如,如图12所示,在初始状态下,假设的是巡逻车101正在移动,并且飞行体103已经着陆在基站102上。在这种状态下,基站102基于在巡逻车101的停止周围的动作、情况等控制飞行体103从基站102起飞。
229.在作为驾驶员的警察113在巡逻期间停止巡逻车101的情况下,存在警察113执行某种活动的可能性。例如,可设想警察113从巡逻车101下车并转为步行巡逻,或者对可疑人员执行职务询问。此外,还可设想警察113从车内监视巡逻车101的附近。为了支持这样的活动,基站102响应于巡逻车101的停止而使飞行体103起飞,并且使相机112开始成像。这么做使得有可能通过使用在相机112中生成的飞行体捕获的图像来支持警察113。例如,可以使用飞行体捕获的图像来监视巡逻车101和警察113的周围,并且可以适当地将必要信息通知给警察113等。此外,例如,可以分析飞行体捕获的图像以检测异常的发生、可疑人员的出现等,并且可以将异常、危险等的发生通知给警察113。而且,例如,基于飞行体捕获的图像,有可能为警察113或巡逻车101示出道路或引导。此外,例如,可以基于飞行体捕获的图像来监视或记录警察113的行为。
230.在这种起飞控制中,在巡逻车101停止时(当巡逻车101减速以达到0km/h时),基站102可以控制飞行体103从基站102起飞。在这种情况下,当基站102基于例如车辆信息中包括的车辆速度信息检测到巡逻车101停止时,基站102生成用于使飞行体103从基站102(预定位置)起飞的飞行控制信息,并将飞行控制信息发送到飞行体103。飞行体103根据飞行控制信息从基站102起飞。
231.此外,在起动的巡逻车101减速至预定速度或更低(例如,20km/h或更低等)时,基站102可以控制飞行体103从基站102起飞。在这种情况下,当基站102基于例如车辆信息中包括的车辆速度信息检测到巡逻车101的速度已经减速至预定速度或更低时,基站102生成用于使飞行体103从基站102(预定位置)起飞的飞行控制信息,并将飞行控制信息发送到飞行体103。飞行体103根据飞行控制信息从基站102起飞。
232.注意的是,在如上所述使飞行体103起飞的情况下,基站102可以使相机112开始成像。例如,当基站102基于车辆信息如上所述检测到巡逻车101停止或巡逻车101减速至预定速度或更低时,基站102将飞行控制信息发送到飞行体103以使飞行体103起飞,并将成像控制信息发送到飞行体103(相机112)以开始由相机112进行成像。
233.注意的是,警察113即使在不巡逻的情况下也可以驾驶巡逻车101。例如,存在警察113驾驶巡逻车101从家去上班或回家的情况。此外,例如,可以存在警察113在警察局等通过驾驶巡逻车101移动的情况。而且,可以存在休息期间警察113驾驶巡逻车101去吃饭的情况。由于这些情况不是巡逻,因此没有必要使飞行体103飞行来监视周围。
234.因此,只有在满足指示正在巡逻的条件的情况下,才可以执行控制以响应于巡逻车101的停止而使飞行体103起飞。指示正在巡逻的条件可以是任何条件。例如,在巡逻车101停止后的预定时间(例如,几秒)内发动机没有关闭(保持开启)的情况下,基站102可以控制飞行体103起飞,如上所述。
235.此外,例如,在巡逻车101停止后打开巡逻车101的门的情况下,基站102可以控制飞行体103如上所述起飞。而且,例如,在巡逻车101停止同时打开旋转灯的情况下,基站102
可以控制飞行体103起飞,如上所述。
236.此外,例如,在基于车辆信息的车辆位置和姿态信息(包括使用gps信号的定位结果等)判定巡逻车101的停止位置,并且确定巡逻车101的停止位置是例如预先登记的位置(诸如警察局或家)以外的位置的情况下,基站102可以控制飞行体103起飞,如上所述。
237.而且,基站102可以在如上所述使飞行体103起飞时使相机112开始成像。此外,例如,基站102可以执行由相机112生成的飞行体捕获的图像到中央控制服务器105的流传输分发。而且,由相机112生成的飞行体捕获的图像可以记录在任何地方。例如,基站102可以记录捕获的图像。此外,中央控制服务器105可以记录捕获的图像。而且,其它设备可以记录捕获的图像。
238.此外,基站102可以使已经起飞的飞行体103上升到最高海拔高度以监视巡逻车101的周围(捕获周围的图像)。然后,在警察113离开巡逻车101的情况下,基站102可以使已经上升到最高海拔高度的飞行体103下降并捕获警察113的周围的图像。这么做使得有可能在警察113在车内的情况下,使飞行体103监视巡逻车101的周围,并且在警察113下车的情况下,使飞行体103监视警察113的周围。即,可以更容易地根据更多不同情况执行成像。因此,巡逻支持系统100可以更适当地支持更多不同情况。
239.而且,基站102可以控制用于通过相机112对被摄体进行成像的视角等。例如,如上所述,在使已经起飞的飞行体103上升到最高海拔高度并监视巡逻车101的周围(捕获周围的图像)的情况下,基站102将相机112的视角设置为广角。此外,在通过使用飞行体103捕获警察113的周围的图像的情况下,基站102将相机112的视角设置为窄角。这么做使得能够根据被摄体以适当的视角进行成像。因此,巡逻支持系统100可以更适当地支持更多不同情况。
240.注意的是,虽然上面已经描述了视角的控制,但是基站102可以控制与成像相关的任何参数,而不限于视角。例如,可以执行全景成像、深度估计和拼接。
241.<5.用例3(跟踪)>
242.例如,如图13中所示,基站102控制飞行体103跟踪警察113,以捕获走下巡逻车101的警察113及周围的图像。
243.这么做允许巡逻支持系统100支持警察113的行为监视等,并支持警察113的安全管理等。
244.例如,基站102判定(或估计)警察113的位置以便使飞行体103跟踪警察113。为此可以采用任何方法。例如,可以通过使用由警察113携带的终端设备104从gps信号等导出警察113的位置。此外,基站102判定警察113是否已经走下巡逻车101。例如,基于由终端设备104导出的警察113(终端设备104)的位置信息、门打开和关闭的检测以及由终端设备104生成的终端捕获的图像的分析结果等,可以确定警察113是否已经下车。
245.在这种跟踪控制中,基站102可以在巡逻车101开始跟踪时记录捕获的图像。这种记录可以在基站102中执行,可以在中央控制服务器105中执行,或者可以在其它设备中执行。此外,可以开始捕获的图像的流传输分发。此外,随着跟踪的开始,可以将书签插入到或者可以将元数据添加到捕获的图像。注意的是,在飞行体103所跟踪的警察113使用武器的情况下(例如,当枪从支架上移除时等),可以触发这种事件。
246.而且,基站102可以控制成像的视角。例如,可以控制与相机112的成像相关的任何
参数,诸如视角(缩放、摇摄、倾斜等)、位置、朝向、倾斜度和高度。
247.此外,例如,当飞行体103跟踪警察113时,相机112可以在捕获的图像中警察113的视线方向被加宽的位置或姿态处捕获图像。换句话说,基站102可以控制飞行体103的飞行,使得相机112可以进行这种成像。这么做使得能够对警察113的视线方向进行密集监视。
248.此外,例如,相机112可以在捕获的图像中警察113位于图像中心的位置或姿态处捕获图像。换句话说,基站102可以控制飞行体103的飞行,使得相机112可以进行这种成像。这么做使得有可能根据方向执行监视而不造成偏差。
249.此外,例如,相机112可以在捕获的图像中与警察113的视线方向相反的方向被加宽的位置或姿态处捕获图像。这么做使得有可能广泛地监视与警察113的视线方向相反的方向(警察113的头部的背面)。因此,可以提高警察113的安全性。
250.此外,例如,相机112可以在捕获的图像中警察113的武器的方向被加宽的位置或姿态处捕获图像。这么做使得能够在警察113使武器指向的方向上进行广泛的监视。因此,可以更准确地管理警察113的行为。
251.此外,例如,在发生诸如枪声之类的突然声音的情况下,基站102可以使相机112指向声源以捕获图像。这么做允许飞行体103(相机112)在已经发生异常的方向上捕获图像。
252.<6.用例4(周围监视)>
253.例如,如图14中所示,基站102控制飞行体103飞行以捕获巡逻车101周围的图像。例如,在警察113远离巡逻车101移动到无法跟踪的程度的情况下,基站102结束对警察113的跟踪,并且使飞行体103绕巡逻车101飞行并执行监视。
254.这么做允许巡逻支持系统100监视巡逻车101的周围并检测巡更车101周围发生的异常。
255.例如,基站102使飞行体103以恒定高度飞行,并且进一步旋转飞行体103(或相机112)以在所有方向(360度)捕获图像。视角可以是广角或窄角。通过使用以这种方式生成的所有方向的捕获的图像,执行异常检测和可疑人员检测。这么做允许基站102适当地监视巡逻车101的周围。
256.此外,可以记录这个捕获的图像。例如,基站102或中央控制服务器105可以记录捕获的图像。此外,其它设备可以记录捕获的图像。
257.注意的是,可以向飞行体103提供多个麦克风,并且可以由多个麦克风记录巡逻车101周围的声音。例如,基站102可以基于收集到的声音来识别声音生成方向,并控制飞行体103以使相机112指向声音生成方向(在声音生成方向上捕获图像)。
258.如上所述,通过应用本技术,可以在每个用例中通过适当的方法更容易地对被摄体进行成像。即,可以更容易地执行根据更多不同情况的成像。
259.<7.补充说明>
260.<应用示例>
261.注意的是,在以上描述中,已经描述了成像设备包括相机112和飞行体103(控制成像范围),该相机112作为对被摄体成像的成像功能单元,该飞行体103作为改变通过成像功能单元的成像范围的成像范围改变单元。但是,成像功能单元和成像范围可变单元中的每一个可以具有任何配置。例如,成像范围可变单元不限于飞行体,并且可以是汽车、船等。即,成像范围可变单元可以是任何移动体。此外,成像范围可变单元可以是能够控制成像功
能单元的姿态等的驱动单元。例如,如图15中所示,成像功能单元可以是装在安装在汽车301上的杆状安装座上的相机302,并且成像范围可变单元可以是被配置为控制相机302的方向、海拔高度等的安装座和驱动单元(未示出)。这个杆状安装座具有可以伸缩、旋转等的可移动部分,并且驱动单元可以通过驱动可移动部分来控制相机302的位置和朝向。例如,驱动单元可以通过缩短安装座来将相机302存储在汽车301的用于相机302的存储单元中,如图15中所示伸长安装座以使相机302从汽车301向上突出,并绕其纵向方向旋转安装座以控制相机302的朝向。此外,成像功能单元不限于被配置为检测可见光的传感器,并且可以是任何传感器。例如,成像功能单元可以是被配置为检测诸如红外光或紫外光之类的不可见光的传感器,或者可以是被配置为检测声音的传感器。
262.此外,在以上描述中,巡逻车101已经被描述为车辆的示例,但这只是示例,并且车辆可以不是巡逻车。例如,车辆可以是救护车、消防车、卡车等。此外,车辆不必是这种特殊车辆或大型车辆,并且例如可以是一般车辆(普通车辆)。此外,上述生成车辆信息的“车辆”不限于汽车。例如,船、飞行器、列车(包括蒸汽火车)等也被包括在“车辆”中。
263.<计算机>
264.上述一系列过程可以由硬件执行,或者也可以由软件执行。在一系列过程由软件执行的情况下,配置软件的程序被安装在计算机中。在此,计算机的示例包括例如作为内置专用硬件的计算机、可以通过安装各种程序来执行各种功能的通用个人计算机等。
265.图16是示出根据程序执行上述一系列过程的计算机的硬件的配置示例的框图。
266.在图16中所示的计算机900中,中央处理单元(cpu)901、只读存储器(rom)902和随机存取存储器(ram)903经由总线904相互连接。
267.总线904还连接有输入/输出接口910。输入单元911、输出单元912、存储单元913、通信单元914和驱动器915连接到输入/输出接口910。
268.输入单元911包括例如键盘、鼠标、麦克风、触摸板、输入终端等。输出单元912包括例如显示器、扬声器、输出终端等。存储单元913包括例如硬盘、ram盘、非易失性存储器等。通信单元914包括例如网络接口等。驱动器915驱动可移除介质921(诸如磁盘、光盘、磁光盘或半导体存储器)。
269.在如上所述配置的计算机中,例如通过cpu 901经由输入/输出接口910和总线904将存储单元913中记录的程序加载到ram 903中来执行上述一系列过程,并且执行。ram 903还适当地存储例如cpu 901执行各种过程所必需的数据。
270.由计算机执行的程序可以通过被记录在例如作为打包介质等的可移除介质921上来应用。在这种情况下,通过将可移除介质921附接到驱动器915,可以经由输入/输出接口910将程序安装在存储单元913中。
271.此外,还可以经由有线或无线传输介质(诸如局域网、互联网或数字卫星广播)来提供程序。在这种情况下,程序可以由通信单元914接收并安装在存储单元913中。
272.此外,程序还可以预先安装在rom 902和存储单元913中。
273.<本技术的适用目标>
274.此外,本技术可以应用于任何配置。例如,本技术还可以被实现为设备的部分配置,例如:处理器(例如,视频处理器)作为系统大规模集成(lsi)等;使用多个处理器等的模块(例如,视频模块);使用多个模块等的单元(例如,视频单元);或进一步向单元添加其它
功能的套件(例如,视频套件)。
275.此外,例如,本技术还可以应用于包括多个设备的网络系统。例如,本技术可以被实现为云计算,该云计算由多个设备经由网络共享和协作地执行处理。例如,对于诸如计算机、视听(av)设备、便携式信息处理终端或物联网(iot)设备之类的任何终端,本技术可以在提供与图像(移动图像)相关的服务的云服务中实现。
276.注意的是,在本说明书中,系统是指多个组件(设备、模块(部分)等)的集合,并且所有组件是否都在同一壳体中无关紧要。因此,容纳在不同壳体中并经由网络连接的多个设备和具有容纳在一个壳体中的多个模块的单个设备都是系统。
277.<本技术适用的领域和应用>
278.本技术所应用于的系统、设备、处理单元等可以用于任何领域,诸如例如交通、医疗、犯罪预防、农业、畜牧业、采矿业工业、美容、工厂、家用电器、天气、自然监视等。此外,可以采用其任何应用。
279.<其它>
280.本技术的实施例不限于上述实施例,并且可以在不脱离本技术的范围的情况下进行各种修改。
281.例如,描述为一个设备(或处理单元)的配置可以被划分并配置为多个设备(或处理单元)。相反,上面描述为多个设备(或处理单元)的配置可以被共同配置为一个设备(或处理单元)。此外,当然,上述以外的配置可以被添加到每个设备(或每个处理单元)的配置。而且,只要整个系统的配置和动作基本相同,一个设备(或处理单元)的配置的一部分就可以被包括在其它设备(或其它处理单元)的配置中。
282.此外,例如,上述程序可以在任何设备中执行。在那种情况下,只要求设备具有必要的功能(功能块等),使得可以获得必要的信息。
283.此外,例如,一个流程图的各个步骤可以由一个设备执行,或者可以由多个设备共享和执行。而且,在一个步骤包括多个过程的情况下,多个过程可以由一个设备执行,或者可以由多个设备共享和执行。换句话说,可以将一个步骤中包括的多个过程作为多个步骤来执行。相反,被描述为多个步骤的过程可以作为一个步骤共同执行。
284.此外,例如,在由计算机执行的程序中,描述程序的步骤的处理可以按照本说明书中描述的次序按时间次序执行,或者可以在需要的时机(诸如进行呼叫时)并行或单独执行。即,只要不发生矛盾,就可以按照与上述次序不同的次序执行每个步骤的处理。而且,描述程序的步骤的这个处理可以与其它程序的处理并行执行,或者可以与其它程序的处理组合执行。
285.此外,例如,只要不存在矛盾,与本技术相关的多个技术就可以作为单个主体独立实现。当然,可以组合使用多种现有技术中的任何技术。例如,任何实施例中描述的本技术的一部分或全部可以与其它实施例中描述的本技术的一部分或全部组合实现。此外,上述本技术的一部分或全部可以与上面未描述的另一种技术组合实现。
286.注意的是,本技术还可以具有以下配置。
287.(1)一种信息处理装置,包括:
288.控制单元,被配置为基于车辆信息来控制成像设备,所述成像设备包括成像功能单元和成像范围可变单元,所述车辆信息是关于车辆的信息。
289.(2)根据(1)所述的信息处理装置,其中
290.控制单元基于车辆信息来控制成像功能单元的成像。
291.(3)根据(2)所述的信息处理装置,其中
292.控制单元控制成像的视角、成像的开始或结束、或者通过成像生成的捕获的图像的发送的开始或结束。
293.(4)根据(1)至(3)中的任一项所述的信息处理装置,其中
294.成像范围可变单元是移动体,以及
295.控制单元基于车辆信息来控制移动体的移动。
296.(5)根据(4)所述的信息处理装置,其中
297.移动体是飞行体,以及
298.控制单元基于车辆信息来控制飞行体的飞行。
299.(6)根据(5)所述的信息处理装置,其中控制单元控制飞行体的位置、高度、朝向、倾斜度或运动。
300.(7)根据(1)至(6)中的任一项所述的信息处理装置,其中
301.车辆信息包括车辆位置和姿态信息,所述车辆位置和姿态信息是关于车辆的位置和姿态的信息。
302.(8)根据(1)至(7)中的任一项所述的信息处理装置,其中
303.车辆信息包括车辆速度信息,所述车辆速度信息是关于车辆的速度的信息。
304.(9)根据(1)至(8)中的任一项所述的信息处理装置,其中
305.车辆信息包括车辆操作信息,所述车辆操作信息是关于用户对车辆的操作的信息。
306.(10)根据(1)至(9)中的任一项所述的信息处理装置,其中
307.车辆信息包括车辆附属装备信息,所述车辆附属装备信息是关于车辆的附属装备的信息。
308.(11)根据(1)至(10)中的任一项所述的信息处理装置,其中
309.控制单元还基于环境信息来控制成像设备,所述环境信息是关于车辆的周围的信息。
310.(12)根据(11)所述的信息处理装置,其中
311.环境信息包括由成像功能单元生成的捕获的图像,或者包括捕获的图像的分析结果。
312.(13)根据(11)所述的信息处理装置,其中
313.环境信息包括由不同于所述成像设备的其它成像设备生成的捕获的图像,或者包括捕获的图像的分析结果。
314.(14)根据(1)至(13)中的任一项所述的信息处理装置,其中
315.成像范围可变单元是飞行体,以及
316.在车辆的速度达到预定速度或更高的情况下,控制单元控制飞行体以使成像设备着陆在预定位置。
317.(15)根据(1)至(14)中的任一项所述的信息处理装置,其中
318.成像范围可变单元是飞行体,以及
319.控制单元通过根据车辆的速度控制飞行体来控制成像设备的海拔高度。
320.(16)根据(1)至(15)中的任一项所述的信息处理装置,其中
321.成像范围可变单元是飞行体,
322.在车辆停止的情况下,控制单元控制飞行体并使成像设备起飞。
323.(17)根据(1)至(16)中的任一项所述的信息处理装置,其中
324.成像范围可变单元是飞行体,以及
325.在车辆的用户下车的情况下,控制单元控制飞行体以使成像设备跟踪用户。
326.(18)根据(1)至(17)中的任一项所述的信息处理装置,其中
327.成像范围可变单元是飞行体,以及
328.在用户离开车辆预定距离的情况下,控制单元控制飞行体以使成像功能单元捕获车辆的周围的图像。
329.(19)一种信息处理方法,包括:
330.基于车辆信息来控制成像设备,所述成像设备包括成像功能单元和成像范围可变单元,所述车辆信息是关于车辆的信息。
331.(20)一种使计算机作为以下单元发挥功能的程序:
332.控制单元,被配置为基于车辆信息来控制成像设备,所述成像设备包括成像功能单元和成像范围可变单元,所述车辆信息是关于车辆的信息。
333.附图标记列表
334.100 巡逻支持系统
335.101 巡逻车
336.102 基站
337.103 飞行体
338.104 终端设备
339.105 中央控制服务器
340.111 电缆
341.112 相机
342.113 警察
343.114 网络
344.131 车辆单元
345.132 车辆信息生成单元
346.133 通信单元
347.141 车辆信息获取单元
348.142 环境信息获取单元
349.143 控制单元
350.144 通信单元
351.151 飞行控制单元
352.152 成像控制单元
353.153 车辆控制单元
354.154 终端控制单元
355.155 服务器处理单元
356.161 飞行单元
357.162 成像单元
358.163 环境信息生成单元
359.164 流传输处理单元
360.165 通信单元
361.171 成像单元
362.172 传感器单元
363.173 流传输处理单元
364.174 环境信息生成单元
365.175 通信单元
366.181 指令命令生成单元
367.182 流传输处理单元
368.183 通信单元
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1