一种自适应优化城市灾区网络覆盖的无人机部署方法
1.本发明属于智慧城市以及无线通信技术领域,特别是一种自适应优化城市灾区网络覆盖的无人机部署方法。
背景技术:
2.自然灾害,例如地震,飓风,火山爆发以及海啸等的发生使得城市地区受到极其严重的损害。突发事件的发生使得城市地面通信基础设施极易处于拥塞瘫痪状态或者遭到严重毁坏,进一步导致城市灾区的环境信息以及救援信息无法得到有效传输,进而影响救援行动的有效实施。城市灾区建筑倒塌,废墟面积广,车辆难以进入,寻找合适的部署地面基站的地区是一件困难的事情,因此灾区部署地面基站效率低,消费高,且余震可能会对新的基站造成毁坏。基于此,部署无人机网络已经成为解决这些难题的高效方案。由于我国城市化速度越来越快,且城市建筑密集,人口众多,灾害的发生使得城市地面通信基础设施极易处于拥塞瘫痪状态或者遭到严重毁坏,因此采用无人机网络对灾区提供应急通信成为关键。
3.研究表明,灾后的72小时是“黄金救援时间”,因此,灾后的紧急救援是挽救生命的重要过程(参考文献erdelj m,kr
ó
l m,natalizio e.wireless sensor networks andmulti
‑
uav systems for natural disaster management[j].computer networks,2017, 124:72
‑
86.)。在此期间,救援人员之间的通信以及城市中遇难者的位置信息等是极其重要的,他们需要共享信息来了解更多的灾区情况以便更高效的完成救援任务,挽救更多的生命,减少损失。无人机集群组成的无人机网络能够更好的为灾区提供应急通信,覆盖面积和待覆盖区域面积的比值是对无人机网络覆盖能力衡量的一种重要指标。随着无人机相关关键技术的突破,无人机集群组成的无人机网络被广泛运用于应急通信、环境监控、军事侦察、物流等领域。无人机网络因其移动性灵活、自主性强等特点,在应急通信领域发挥着越来越重要的作用。城市灾区的无人机覆盖问题也存在许多挑战,例如,城市灾区中地面用户节点的分布以及灾害发生后地面用户节点的移动性。这其中,城市灾区中存在一些区域用户节点无法进入,因此可以减少对该区域的覆盖以减少覆盖冗余。其次,由于用户节点的移动性,需要无人机网络对地面用户节点进行动态覆盖,以免用户节点移动出网络的覆盖区域,使得该节点无法通信。因此,通过研究城市灾区地面用户节点的移动规则以及对城市的区域进行划分可以有效提高无人机网络对城市灾区重点区域动态覆盖过程中的加权覆盖率。
[0004]
针对城市灾区无人机网络的覆盖问题,有些现有技术提出了一种两阶段优化算法来为城市地区提供无缝的长期覆盖(参考文献ragothaman s,maaref m,kassas z m. multipath
‑
optimal uav trajectory planning for urban uav navigation with cellularsignals[c]//2019 ieee 90th vehicular technology conference(vtc2019
‑
fall).ieee, 2019:1
‑
6.),但重点是对能源消耗优化的问题没有解决。有些现有技术提出一种新型的无人机辅助路由协议,重点对城市环境下的无人机网络通信服务质量进行优化
(参考文献oubbati o s,chaib n,lakas a,et al.uav
‑
assisted supporting servicesconnectivity in urban vanets[j].ieee transactions on vehicular technology,2019, 68(4):3944
‑
3951.),但不适用于灾害发生的场景。有些现有技术集中于对城市灾区的研究,提出了一种无人机在灾难场景下进行战术动作的智能策略。结合了jaccard距离以及模拟退火算法对地面用户进行动态覆盖(参考文献s
á
nchez
‑
garc
í
a j, garc
í
a
‑
campos j m,toral s l,et al.an intelligent strategy for tactical movementsof uavs in disaster scenarios[j].international journal of distributed sensornetworks,2016,12(3):8132812.)。这个策略在保证网络连通性的情况下最大化了无人机服务的受害者数量,但是还存在较多处在角落的节点未被覆盖。因此现有技术大多数工作是对整个目标区域的覆盖优化,产生覆盖冗余且不考虑地面用户节点的移动性,不符合实际的城市灾区场景。
技术实现要素:
[0005]
为了克服现有技术存在的上述问题,本发明的目的在于提供一种自适应优化城市灾区网络覆盖的无人机部署方法,为城市灾区的重点区域移动用户节点提供应急网络通信,在对城市灾区的无人机网络覆盖场景中,对于待覆盖城市区域,能被无人机网络覆盖的概率由无人机集群共同决定,通过优化无人机部署,保证网络连通性前提下达到对城市重点区域移动用户节点覆盖率的加权覆盖率最大化的目标,为提高无人机网络加权覆盖率并保证网络连通性的自适应覆盖算法。
[0006]
本发明的目的在于提供一种自适应优化城市灾区网络覆盖的无人机部署方法,包括以下步骤:
[0007]
步骤1,模拟城市灾区场景并构建地面移动用户节点的状态集;
[0008]
步骤2,记录所述步骤1中获得的各时刻地面移动用户节点的位置信息;
[0009]
步骤3,根据所述步骤2中各时刻地面移动用户节点的位置信息,计算城市灾区无人机网络的最优覆盖,根据所述最优覆盖获得最优覆盖策略。
[0010]
优选的,所述步骤1的所述模拟城市灾区场景包括:将待覆盖城市区域划分为不同的区域,其中所述不同的区域包括建筑区,街道,禁止区域,开放性区域以及建筑残骸,通过限制节点在所述不同的区域内的移动以模拟城市灾区地面用户节点的移动,从而获得模拟后的城市灾区场景。
[0011]
优选的,所述将待覆盖城市区域划分为不同的区域根据城市灾区的区域划分模型进行,所述城市灾区的区域划分模型为:
[0012]
a={b,r,p,x}
ꢀꢀꢀꢀꢀ
(1)
[0013]
其中,a为待覆盖城市灾区,b为建筑物集合且b1‑
b8分别代表居住建筑、公共建筑、商业建筑、商公混合建筑、住公混合建筑、商公混合建筑、其他;r为道路集合且r1‑
r6分别为快速通过型道路、穿越通过型道路、景观旅游型街道、符合共享型街道,居民生活型街道和景观休闲步行路;p为公园等开放性区域,x为禁止区域,即人类无法进入的区域、湖泊、河流。
[0014]
优选的,所述构建地面移动用户节点的状态集包括时刻,方向、速度、坐标位置和/ 或移动规则。
[0015]
优选的,所述地面移动用户节点的集合为g={g1,g2,
…
,g
n
},其中用户节点g
i
的位置坐标为(x
i
,y
i
,0),所述移动用户节点的移动规则为:
[0016][0017]
其中,random为用户节点在开放性区域中随机移动;b
‑
trend为用户节点在建筑区域内,节点逐渐向建筑的四个边缘移动并沿着边缘最终到出口;linear为用户节点在街道上线性移动;b
col
表示建筑物坍塌,而fade为用户节点在建筑区且建筑物坍塌时,用户节点被困在建筑区内。
[0018]
优选的,所述步骤3包括:
[0019]
步骤31,初始化无人机,包括:将每架无人机s
i
∈s(s={s1,s2,
…
,s
n
})的状态设置为初始状态,设置最大迭代次数,并定义计算加权覆盖率的效用函数;
[0020]
步骤32,更新位置,包括:根据无人机网络中所有无人机节点之间进行的信息交互,将所述步骤2获得的地面移动用户节点信息与无人机的位置更新方程融合,计算无人机集合,并采用位置更新方程下一位置集合下网络的加权覆盖率和当前位置下网络的加权覆盖率,选择能够带来最优加权覆盖率的覆盖策略。
[0021]
步骤33,循环执行所述步骤32直到无人机网络的所述当前位置下网络的加权覆盖率不再变化或者达到设定的最大迭代次数,无人机位置更新结束,得到最优的所述加权覆盖率以及所述覆盖策略。
[0022]
优选的,所述步骤31中定义的加权覆盖率效用函数具体为:
[0023]
将待覆盖区域离散化为m
×
n个像素点,则无人机网络的全局覆盖率为:
[0024][0025]
其中,j为待覆盖区域内任意一个像素点,为整个待覆盖区域内被覆盖的像素点总数;
[0026]
优选的,将地面移动节点视为像素点可得无人机网络对重点区域的覆盖率为:
[0027][0028]
其中,g∈g={g1,g2,
…
,g
n
}为任意一个地面用户节点,为被覆盖的地面用户节点的个数,h为重点区域的像素点总个数;
[0029]
优选的,牺牲禁止区域的覆盖率从而提高对重点区域的覆盖率,引入加权覆盖率对整体目标区域覆盖率和重点区域覆盖率进行归一化计算:
[0030]
cov(w)=ω1cov(s)+ω2cov(h)
ꢀꢀꢀꢀꢀ
(5)
[0031]
其中,ω1为目标区域整体覆盖率的加权系数,ω2为重点区域覆盖率的加权系数且ω1<ω2;由此,目标函数为:
[0032]
f(x)=max(cov(w))
ꢀꢀꢀꢀꢀꢀ
(6)。
[0033]
优选的,所述步骤32所述无人机集合的位置更新策略包括:
[0034]
无人机集合的初始状态为随机分布,首先利用公式(5)计算当前状态下的加权覆盖率,然后无人机集合通过公式(7)更新下一次的迭代的目标位置:
[0035][0036]
其中,x(t+1),y(t+1)分别为第t+1次迭代无人机集合的横坐标位置和纵坐标位置向量;分别为虚拟力向导的无人机的横纵坐标改进距离向量,为无人机s
i
受到无人机集合中其所有其无人机的虚拟力合力,其中计算公式为公式(8);v
α
,v
β
,v
σ
为权重系数,ν
γ
=ν
α
+ν
β
+ν
σ
,x1,y1,x2,y2,x3,y3的计算公式为公式(9)
‑
公式(11);
[0037][0038]
其中,θ
ij
表示力的方向,θ
ij
=tan
‑1((y
i
‑
y
j
)/(x
i
‑
x
j
));ω
a
和ω
r
分别表示引力系数和斥力系数;距离阈值为d
th
=2r,其中r为无人机的通信半径;表示无人机与集合内其他无人机距离的最小值,d
th
表示无人机与无人机之间的距离;d
ij
表示无人机i与无人机j之间的距离。
[0039][0040][0041][0042]
其中,x
α
,y
α
,x
β
,y
β
,x
σ
,y
σ
分别为通过算法选出的α,β,σ无人机向导下无人机的位置坐标向量;a1=a2=a3=2αr1‑
α为协同系数向量,α=2
‑
2((e
t/t
‑
1)/(e
‑
1))为收敛因子,t和t分别为当前迭代次数和最大迭代次数,r1为[0,1]中的随机向量,且:
[0043][0044][0045][0046]
其中,c1=c2=c3=2r2为协同系数向量,r2为[0,1]中的随机向量,x
levy
,y
levy
为当前无人机集合通过莱维飞行规则更新后的无人机位置向量:
[0047][0048]
其中,x,y为初始状态无人机的位置向量;α0,β为常数;μ和均服从高斯分布,且满足:式中xd,yd分别表示无人机集合的横纵坐标的改进距离向量,d
max
为最大移动步长,式中,δx,δy为无人机集合与其水平距离最近的地面用户节点坐标差值向量,且与无人机集合水平距离最小的位置坐标集通过计算矩阵(16)每列的最小值以及最小值所在行数获得,其中,n为无人机的个数,p为地面移动节点的个数;矩阵中元素代表n个无人机分别与p个地面用户节点之间的水平距离。
[0049][0050]
本发明的有益效果:
[0051]
采用本发明提供的技术方案,与已有的公知技术相比,具有如下显著效果:
[0052]
(1)本发明的一种自适应优化城市灾区网络覆盖的无人机部署方法,针对城市灾区救援,应急通信领域,对城市灾区重点区域移动的地面用户节点覆盖优化问题,首先对城市灾区环境中地面用户节点的移动进行模拟,对城市区域进行划分,并获得城市灾区内移动的用户节点的状态集。将获得的信息融入无人机的部署方法中,无人机网络并不受限于固定的地面用户节点,可根据需要对无人机集合的位置进行调整,本发明能够为城市灾区快速提供稳定可靠的网络,易管理,且适应性强。
[0053]
(2)本发明的一种自适应优化城市灾区网络覆盖的无人机部署方法,是根据城市灾区的受灾面积、城市区域内建筑、道路的分布,以及各区域内用户节点的人口数量、移动规则等情况合理设计的,引入加权系数对覆盖效用函数进行调整,将城市灾区划分为重点区域以及非重点区域,在一定程度上牺牲非重点区域的覆盖率,进而提高了无人机网络对重点区域的覆盖率。
[0054]
(3)本发明的一种自适应优化城市灾区网络覆盖的无人机部署方法,通过设计一个动态调整规则,在无人机网络为城市灾区地面移动用户提供网络服务的过程中,无人机网络能够根据地面用户节点移动变化而动态调整无人机的位置,进而能够更加稳定的为城市灾区提供网络服务。
[0055]
(4)本发明的一种自适应优化城市灾区网络覆盖的无人机部署方法,通过设计一个位置调整规则来维持无人机网络的连通性,以免无人机因适应地面用户节点的移动而导致无人机网络不连通。本发明在保证网络连通性的前提下提高了无人机网络的覆盖率。
附图说明
[0056]
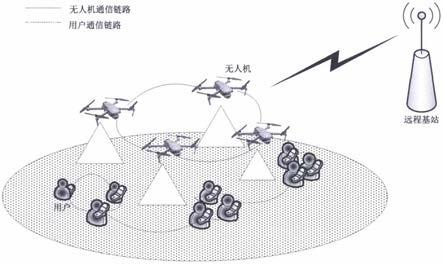
附图1为根据本发明实施例的自适应优化城市灾区网络覆盖的无人机部署模型的
应急网络结构示意图。
[0057]
附图2为根据本发明实施例的自适应优化城市灾区网络覆盖的无人机部署模型的结构示意图。
[0058]
附图3为根据本发明实施例的某城市区域分配图。
[0059]
附图4为根据本发明实施例的城市灾区298个地面用户节点初始分布图。
[0060]
附图5为根据本发明实施例的城市灾区298个地面用户节点根据移动规则移动298 秒之后的节点分布图。
[0061]
附图6为根据本发明实施例的10次实验中20架无人机在所述cs
‑
igwo算法下全局覆盖率和加权覆盖率的收敛曲线图。
[0062]
附图7为根据本发明实施例的地面用户节点移动500s时20架无人机最大化加权覆盖率的部署图。
[0063]
附图8为根据本发明实施例的1次实验中三种城市环境参数下加权覆盖率、网络连通度和平均路径损耗随时间的变化曲线图。
[0064]
附图9为根据本发明实施例的10次实验中调整路径损耗阈值后郊区环境下加权覆盖率、网络连通度的变化曲线图。
[0065]
附图10为根据本发明实施例的1次实验中调整路径损耗阈值后郊区环境下全局覆盖率、网络连通度和平均路径损耗随时间的变化曲线图。
具体实施方式
[0066]
下面结合附图对本发明的具体实施方式进行详细说明,但并不用来限制本发明的保护范围。
[0067]
参见图1,本实施例的一种自适应优化城市灾区网络覆盖的无人机部署方法,针对无人机网络在城市灾区的应急救援领域的覆盖优化,以及地面用户节点的移动性问题,提出了可以有效提高全局覆盖率和重点区域覆盖率(加权覆盖率)的应急网络部署方法,可以根据地面用户节点的移动规则调整无人机的位置以便在整个过程中服务更多的地面用户节点,可以快速的为城市灾区提供一个可靠的应急网络。可以根据受灾城市的面积,建筑分布、道路等分布,以及人口数量、密度合理的设计无人机网络的分布。相对现有技术,可以有效扩大无人机网络对重点区域的覆盖面积,并可根据地面用户节点的移动自适应调整部署,增强网络的连通性和稳定性。
[0068]
参见图1,本实施例的应急网络在硬件上主要包括无人机,无线设备、gps定位装置和远程基站,旨在快速的建立起应急网络,为灾区提供一个可靠稳定的通信,帮助救援行动的实施。
[0069]
参见图2,本实施例的自适应优化城市灾区网络覆盖的无人机部署模型,刻画如下:在无人机网络的覆盖场景中,对于任意的待覆盖区域,被无人机网络覆盖的概率是由能与该区域的地面用户节点通信的无人机共同决定的;通过无人机部署和覆盖率的控制,实现在满足通信要求和维持网络连通性的前提下达到加权覆盖率最大化的目标。
[0070]
本实施例的自适应优化城市灾区网络覆盖的无人机部署方法,包括以下步骤:
[0071]
步骤1,对城市灾区场景进行模拟,将待覆盖城市区域划分为不同的区域,其中包括建筑区,街道,禁止区域,开放性区域以及建筑残骸,通过限制节点在不同区域的移动模
拟城市灾区地面用户节点的移动。构建地面用户节点的状态集,包括时刻,方向、速度、坐标位置、移动规则。
[0072]
步骤2,通过步骤1记录各个时刻地面用户节点的位置信息。
[0073]
步骤3,结合步骤2获得的地面用户节点的位置信息计算城市灾区无人机网络的最优覆盖,得出最优覆盖策略,具体如下:
[0074]
步骤31,初始化:每架无人机s
i
∈s(s={s1,s2,
…
,s
n
})的状态设置为初始状态,设置最大迭代次数,并定义计算加权覆盖率的效用函数。
[0075]
步骤32,位置更新:无人机网络中所有无人机节点之间可以进行信息交互,将步骤 2获得的地面用户节点信息与无人机的位置更新方程融合,计算无人机集合采用位置更新方程下一位置集合下的网络覆盖率和当前位置下的网络覆盖率,选择能够带来最优加权覆盖率的覆盖策略。
[0076]
步骤33,收敛:循环步骤32直到无人机网络的加权覆盖率不再变化或者达到设定的最大迭代次数,无人机位置更新结束,得到最优的加权覆盖率以及覆盖策略。
[0077]
本实施例的具体实施如下:
[0078]
在步骤1中,城市灾区的区域划分模型为:
[0079]
a={b,r,p,x}
ꢀꢀꢀꢀꢀ
(1)
[0080]
其中,a为待覆盖城市灾区,b为建筑物集合且b1‑
b8分别代表居住建筑、公共建筑、商业建筑、商公混合建筑、住公混合建筑、商公混合建筑、其他;r为道路集合且r1‑
r6分别为快速通过型道路、穿越通过型道路、景观旅游型街道、符合共享型街道,居民生活型街道和景观休闲步行路;p为公园等开放性区域,x为禁止区域(人类无法进入的区域、湖泊、河流等)。
[0081]
在步骤2中,地面用户节点集合为g={g1,g2,
…
,g
n
},其中用户节点g
i
的位置坐标为 (x
i
,y
i
,0),其移动规则为:
[0082][0083]
其中,random为用户节点在开放性区域中随机移动;b
‑
trend为用户节点在建筑区域内,节点逐渐向建筑的四个边缘移动并沿着边缘最终到出口;linear为用户节点在街道上线性移动;b
col
表示建筑物坍塌,而fade为用户节点在建筑区且建筑物坍塌时,用户节点被困在建筑区内。
[0084]
将待覆盖区域离散化为m
×
n个像素点,定义用户与无人机之间链路损耗小于路径损耗阈值pl
max
时,该用户可被无人机覆盖。在目标区域a中,有m个地面用户节点,节点集合为g={g1,g2,...,g
m
};有n个无人机节点,节点集合为s={s1,s2,...,s
n
}。第i个无人机节点s
i
的位置坐标为(x
i
,y
i
,h
i
),设像素点j的位置坐标为(x
j
,y
j
,0)。则无人机节点s
i
与像素点 j之间的水平距离为:
[0085][0086]
采用a2g信道模型,则像素点j和无人机i之间的视距通信(los)链路概率为:
[0087][0088]
其中,α和β是环境参数,数值设置与城市的建筑物密度有关。h
i
为无人机s
i
的飞行高度。此外,非视距通信(nlos)链路的概率为:
[0089][0090]
由于城市背景复杂,且存在大量的噪声和干扰。因此,在城市灾区,无线传播信号除了自由空间传播损耗之外,还有因建筑物遮挡和散射产生的损失。因此,无人机s
i
与像素点j之间的los和nlos链路损失模型分别为:
[0091][0092][0093]
其中,f
c
为载波频率;η
los
和η
nlos
分别为视距通信链路和非视距链路下的额外路径损失;c为光速;d
ij
为无人机s
i
与像素点j之间的距离:
[0094][0095]
因此,在los和nlos模型下,无人机s
i
与像素点j之间a2g的链路平均路径损失为:
[0096][0097]
为了保证服务质量,像素点j的接收功率必须超过一定的阈值,也就是说,像素点j 与无人机s
i
之间的链路损耗小于或等于某一个阈值pl
max
时,像素点j被无人机s
i
覆盖,即:
[0098]
l
ij
≤pl
max
ꢀꢀꢀꢀꢀ
(10)
[0099]
则像素点j可被无人机节点s
i
感知的概率为:
[0100][0101]
任一像素点都可同时被多个无人机节点感知,因此像素点j被无人机节点集合s感知的联合概率表示为:
[0102][0103]
则无人机网络的全局覆盖率为:
[0104][0105]
同理,将地面移动节点视为像素点可得无人机网络对重点区域的覆盖率为:
[0106][0107]
在某种程度上牺牲禁止区域的覆盖率可以重点提高对重点区域的覆盖率,因此引入加权覆盖率对整体目标区域覆盖率和重点区域覆盖率进行归一化计算:
[0108]
cov(w)=ω1cov(s)+ω2cov(h)
ꢀꢀꢀꢀꢀꢀ
(15)
[0109]
其中,ω1为目标区域整体覆盖率的加权系数,ω2为重点区域覆盖率的加权系数且ω1<ω2。由此,目标函数为:
[0110]
f(x)=max(cov(w))
ꢀꢀꢀꢀꢀ
(16)
[0111]
所述步骤32无人机集合的位置更新策略具体如下:
[0112]
无人机集合的初始状态为随机分布,首先利用公式(16)计算当前状态下的加权覆盖率,然后无人机集合通过公式(17)更新下一次的迭代的目标位置:
[0113][0114]
其中,x(t+1),y(t+1)分别为第t+1次迭代无人机集合的横坐标位置和纵坐标位置向量;分别为虚拟力向导的无人机的横纵坐标改进距离向量,为无人机s
i
受到无人机集合中其所有其无人机的虚拟力合力,其中计算公式为公式(8);v
α
,v
β
,v
σ
为权重系数,x1,y1,x2,y2,x3,y3的计算公式为公式(19)
ꢀ‑
公式(21)。
[0115][0116]
其中,θ
ij
表示力的方向,θ
ij
=tan
‑1((y
i
‑
y
j
)/(x
i
‑
x
j
));ω
a
和ω
r
分别表示引力系数和斥力系数。距离阈值为d
th
=2r,其中r为无人机的通信半径。表示无人机与集合内其他无人机距离的最小值,d
th
表示无人机与无人机之间的距离。
[0117][0118][0119][0120]
其中,x
α
,y
α
,x
β
,y
β
,x
σ
,y
σ
分别算法选出的α,β,σ无人机向导下无人机的位置坐标向量;a1=a2=a3=2αr1‑
α为协同系数向量,α=2
‑
2((e
t/t
‑
1)/(e
‑
1))为收敛因子,t 和t分别为当前迭代次数和最大迭代次数,r1为[0,1]中的随机向量,且:
[0121][0122][0123][0124]
其中,c1=c2=c3=2r2为协同系数向量,r2为[0,1]中的随机向量。x
levy
,y
levy
为当
前无人机集合通过莱维飞行规则更新后的无人机位置向量:
[0125][0126]
其中,x,y为初始状态无人机的位置向量;α0为常数;式中xd,yd分别表示无人机集合的横纵坐标的改进距离向量,d
max
为最大移动步长。式中,δx,δy为无人机集合与其水平距离最近的地面用户节点坐标差值向量,且与无人机集合水平距离最小的位置坐标集通过计算矩阵(25)每列的最小值以及最小值所在行数获得。其中,n为无人机的个数,p为地面移动节点的个数。
[0127][0128]
优选的,执行步骤3所述的基于莱维改进的灰狼更新机制的无人机网络自适应部署算法(cs
‑
igwo),无人机根据局部覆盖适应度值进行探索并进行策略选择,直到所有无人机的位置选择达到最佳或者到达最大收敛次数,具体如下:
[0129]
(1)初始化算法参数,将地面用户节点位置信息输入;
[0130]
(2)利用公式(6)计算适应度函数值,并保留适应度值最好的三组无人机位置;
[0131]
(3)根据公式(7)更新当前无人机集合的位置;
[0132]
(4)根据新的无人机集合的位置,计算适应度函数值,并保留适应度值最大的无人机集合位置到下一代;
[0133]
(5)更新α,a1,a2,a3和c1,c2,c3;
[0134]
(6)计算所有无人机集合的适应度;
[0135]
(7)更新适应度最好的三组无人机的位置;
[0136]
(8)循环执行公式(3)
‑
公式(7),直到覆盖率选择收敛或者达到设定的迭代次数。
[0137]
实施例1
[0138]
该具体实施例如下描述:系统仿真采用matlab软件,参数的设定不影响一般性;考虑城市灾区环境下的无人机通信网络。待覆盖区域是二维的,平面图近似为1000m
×
1000m 的矩形区域。图3为根据实际地图对该城市灾区进行区域划分的实例,为了方便观察,除禁止区域外,其他区域通过不同的线条来区分,其划分后建筑物结合为道路集合为其中,每个可活动区域都随机分布有一定数量的地面用户节点,用户节点的总数量为298,图4为该实例初始时地面用户节点分布图。地面用户节点的移动速度为0.5
‑
3m/s,在整个目标区域中,每个划分区域内的节点速度都会随机改变。最大速度代表地面用户节点正在从危险区域逃出,或在寻求帮助。静止节点或者以最小速度移动的节点,代表该节点因受伤或周围环境恶劣而行动困难,图5 为该实例城市灾区用户节点移动模型程序运行500s时节点的分布情况。无人机节点的个数为20,初始时随机分布在整
个目标区域,其移动最大步长为125m;所有无人机都在相同的高度125m的上空盘旋,并以恒定的速度5m/s移动;所有无人机无线传输范围均为 125m,可以覆盖以无线传输范围125m为半径的地面圆形区域,且在通信范围内,无人机之间可以进行信息交互。设置无人机的载波频率为2000mhz,环境参数设置为α=0.3,β=110,其他参数设置为η
los
=1db,η
nlos
=20db,pl
max
=85db。算法的最大迭代次数为400。考虑所述的基于莱维改进的灰狼更新机制的无人机网络自适应部署算法(cs
‑
igwo),具体操作如上述具体实施过程,直到加权覆盖率收敛或者达到设定的迭代次数。在各个时刻,无人机集合根据具体实施过程中步骤收敛的结果飞向各自的位置。
[0139]
仿真结果分析:
[0140]
图6是考虑20架无人机在所述cs
‑
igwo算法下无人机网络的全局覆盖率和加权覆盖率收敛曲线以及网络连通度变化曲线(10次实验)。多次仿真实验结果避免了算法结果的偶然性,算法的加权覆盖率平均收敛于93.42%,且网络的连通度稳定,该图表示在保证网络连通性的前提下使得加权覆盖率最大化。
[0141]
图7是实例1中环境参数为α=0.3,β=110的城市灾区的地面用户节点移动500s时, 20架无人机最大化加权覆盖率的部署结果。该图显示,无人机网络维持了网络连通性,且非重点区域的覆盖率较小,即重点提高了该城市灾区重点区域的覆盖率。
[0142]
图8是考虑不同环境参数下所述cs
‑
igwo算法下加权覆盖率、网络连通度、平均路径损耗随时变化的曲线(1次实验)。该图表示在不同环境参数下,不同时刻,无人机网络的加权覆盖率和连通度以及平均路径损耗都变化稳定,印证了本发明的所述cs
‑
igwo 算法能够稳定的对城市灾区进行自适应覆盖,且实现了在维持网络连通性的情况下达到加权覆盖率最大化。但在α=0.5,β=300的环境参数下,略小于环境参数α=0.3,β=110下的加权覆盖率,路径损耗也略高,这是由于环境参数α=0.5,β=300代表密集城市,而密集城市中建筑物遮挡和散射造成路径损耗增多;而环境参数α=0.1,β=750下的加权覆盖率最小且路径损耗最多,这是由于环境参数α=0.1,β=750代表郊区,而郊区中用户节点少,分布稀疏,这就需要无人机飞到更高的高度才能对地面用户节点进行覆盖,这时就产生了更多的路径损耗,导致加权覆盖率减小。
[0143]
图9和图10为调整路径损耗阈值后,郊区环境下覆盖率和网络连通度的变化情况(10 次实验)以及1次实验中不同时刻全局覆盖率、网络连通度和路径损耗的变化情况。由于本发明所述cs
‑
igwo算法中设定了路径损耗阈值,是自主可控的,因此当应用于郊区环境时,可以通过适当提高路径损耗的阈值(100db)以满足优化覆盖。但由于设置郊区环境用户节点是随机分布在待覆盖区域,因此不存在重点区域即不存在加权覆盖率,因此分析调整阈值参数后应用于郊区环境10次实验中全局覆盖率、网络连通度变化。无人机10次实验中,网络的全局覆盖率和网络连通度均变化稳定,且在不同时刻,网络的全局覆盖率、连通度以及路径损耗均变化稳定。图9和图10印证了通过调整本发明的 cs
‑
igwo算法同样适用于郊区环境中,进一步证明了所提方法的真实性和合理性。
[0144]
采用本实施例提供的技术方案,与已有的公知技术相比,具有如下显著效果:
[0145]
(1)本实施例的一种自适应优化城市灾区网络覆盖的无人机部署方法,针对城市灾区救援,应急通信领域,对城市灾区重点区域移动的地面用户节点覆盖优化问题,首先对城市灾区环境中地面用户节点的移动进行模拟,对城市区域进行划分,并获得城市灾区内
移动的用户节点的状态集。将获得的信息融入无人机的部署方法中,无人机网络并不受限于固定的地面用户节点,可根据需要对无人机集合的位置进行调整,本发明能够为城市灾区快速提供稳定可靠的网络,易管理,且适应性强。
[0146]
(2)本实施例的一种自适应优化城市灾区网络覆盖的无人机部署方法,是根据城市灾区的受灾面积、城市区域内建筑、道路的分布,以及各区域内用户节点的人口数量、移动规则等情况合理设计的,引入加权系数对覆盖效用函数进行调整,将城市灾区划分为重点区域以及非重点区域,在一定程度上牺牲非重点区域的覆盖率,进而提高了无人机网络对重点区域的覆盖率。
[0147]
(3)本实施例的一种自适应优化城市灾区网络覆盖的无人机部署方法,通过设计一个动态调整规则,在无人机网络为城市灾区地面移动用户提供网络服务的过程中,无人机网络能够根据地面用户节点移动变化而动态调整无人机的位置,进而能够更加稳定的为城市灾区提供网络服务。
[0148]
(4)本实施例的一种自适应优化城市灾区网络覆盖的无人机部署方法,通过设计一个位置调整规则来维持无人机网络的连通性,以免无人机因适应地面用户节点的移动而导致无人机网络不连通。本发明在保证网络连通性的前提下提高了无人机网络的覆盖率。
[0149]
以上对本发明实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本发明实施例的原理;同时本领域的一般技术人员,根据本发明的实施例,在具体实施方式以及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本发明的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1