定位方法、装置、计算机设备和存储介质与流程
1.本申请涉及定位技术领域,特别是涉及一种定位方法、装置、计算机设备和存储介质。
背景技术:
2.随着工业互联网、物联网和车联网的快速发展,高精度定位成为智能机器人、无人车等移动终端不可或缺的关键支撑服务。卫星导航定位技术具有广域覆盖、普适性好的优点,但是因为信号功率低、穿透力弱,主要用于室外开阔环境下的终端定位,无法在受遮蔽的环境和室内环境提供导航定位服务。
3.5g蜂窝移动网络运用了包括大规模mimo、超密集组网、大带宽信号等关键技术,随着未来将大量部署的多天线5g基站,利用5g信号实现高精度定位将具有非常广阔的发展前景。
4.然而,目前基于5g信号进行定位的方法,在定位精度上还存在提升的空间。
技术实现要素:
5.基于此,有必要针对上述技术问题,提供一种能够提升定位精度的定位方法、装置、计算机设备和存储介质。
6.一种定位方法,包括:通过基站的多个通道接收来自终端的上行频域探测参考信号;根据所述多个通道的所述上行频域探测参考信号,确定信道频域响应向量;将所述信道频域响应向量转化为代表在所述基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量;以所述超完备响应向量作为观测向量,以待解算的各个所述时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据所述观测向量对所述时延
‑
方位角二维谱向量进行解算的解算方程;利用迭代最小化稀疏学习算法,对所述解算方程进行迭代估计,以确定由各个所述时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱;根据所述时延
‑
方位角谱,解算确定所述终端的位置。
7.在一个实施例中,所述根据所述多个通道的所述上行频域探测参考信号,确定信道频域响应向量包括:根据所述多个通道的上行频域探测参考信号,确定所述多个通道的接收信号矩阵;根据所述接收信号矩阵,进行信道估计,得到信道频域响应矩阵;对所述信道频域响应矩阵进行向量化,得到信道频域响应向量。
8.在一个实施例中,在所述得到信道频域响应矩阵之后,在所述对所述信道频域响应矩阵进行向量化之前,还包括:对所述信道频域响应矩阵的子载波维度进行降维处理。
9.在一个实施例中,所述将所述信道频域响应向量转化为代表在所述基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量,包括:获取所述基站的天线阵的作用距离范围和接收方位角范围;基于所述作用距离范围和所述接收方位角范围,确定所述天线阵的作用距离
‑
方位角域;使用均匀栅格对所述作用距离
‑
方位角域进行分割,以确定作用距离
‑
方位角域上均匀分布的多个时延
‑
方位角栅格点;
将所述信道频域响应矩阵转化为在所述多个时延
‑
方位角栅格点处的超完备响应向量。
10.在一个实施例中,所述获取所述基站的天线阵的作用距离范围和接收方位角范围包括:根据所述基站的天线阵的结构信息以及所述天线阵的朝向信息,确定所述天线阵的接收方位角范围;根据所述终端的发射功率以及所述天线阵的灵敏度,确定所述天线阵的最大作用距离,根据所述最大作用距离确定所述天线阵的作用距离范围。
11.在一个实施例中,所述利用迭代最小化稀疏学习算法,对所述解算方程进行迭代估计,以确定由各个所述时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱,包括:基于所述超完备响应向量,确定匹配矩阵,进行二维空频匹配滤波,得到所述时延
‑
方位角二维谱向量的初始估计值;根据所述时延
‑
方位角二维谱向量的所述初始估计值,计算估计均方误差,作为噪声功率的初始估计值;基于所述时延
‑
方位角二维谱向量的所述初始估计值和所述噪声功率的所述初始估计值,迭代更新功率矩阵的估计值、所述时延
‑
方位角二维谱向量的估计值以及所述噪声功率的估计值,直至当前迭代次数的时延
‑
方位角二维谱向量的估计值与上一迭代次数的时延
‑
方位角二维谱向量的估计值之间的变化度值小于预定阈值时,停止所述迭代更新;获取停止所述迭代更新时的所述当前迭代次数的时延
‑
方位角二维谱向量的估计值对应的各个所述时延
‑
方位角栅格点处的信号幅度值,基于各个所述时延
‑
方位角栅格点处的所述信号幅度值,形成对应的时延
‑
方位角谱。
12.在一个实施例中,所述根据所述时延
‑
方位角谱,解算确定所述终端的位置,包括:提取所述时延
‑
方位角谱中的多个谱峰,以确定多个路径对应的多对方位角估计值和时延估计值;根据所述多个路径对应的所述多对方位角估计值和时延估计值,从所述多个路径中确定直达径;基于所述直达径对应的所述方位角估计值和所述时延估计值,解算确定所述终端的位置。
13.一种定位装置,包括:探测参考信号接收模块,用于通过基站的多个通道接收来自终端的上行频域探测参考信号;信道频域响应向量确定模块,用于根据所述多个通道的所述上行频域探测参考信号,确定信道频域响应向量;超完备响应向量确定模块,用于将所述信道频域响应向量转化为代表在所述基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量;解算方程建立模块,用于以所述超完备响应向量作为观测向量,以待解算的各个所述时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据所述观测向量对所述时延
‑
方位角二维谱向量进行解算的解算方程;时延
‑
方位角谱确定模块,用于利用迭代最小化稀疏学习算法,对所述解算方程进行迭代估计,以确定由各个所述时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱;位置确定模块,用于根据所述时延
‑
方位角谱,解算确定所述终端的位置。
14.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现步骤:通过基站的多个通道接收来自终端的上行频域探测参考信号;根据所述多个通道的所述上行频域探测参考信号,确定信道频域响应向量;将所述信道频域响应向量转化为代表在所述基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量;以所述超完备响应向量作为观测向量,以待解算的各个所述时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据所述观测向量对所述时延
‑
方位角二维谱向量进行解算的解算方程;利用迭代最小化稀疏学习算法,对所述解算方程进行迭代估计,以确定由各个所述时延
‑
方位角栅格点处的信
号幅度值形成的时延
‑
方位角谱;根据所述时延
‑
方位角谱,解算确定所述终端的位置。
15.一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现步骤:通过基站的多个通道接收来自终端的上行频域探测参考信号;根据所述多个通道的所述上行频域探测参考信号,确定信道频域响应向量;将所述信道频域响应向量转化为代表在所述基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量;以所述超完备响应向量作为观测向量,以待解算的各个所述时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据所述观测向量对所述时延
‑
方位角二维谱向量进行解算的解算方程;利用迭代最小化稀疏学习算法,对所述解算方程进行迭代估计,以确定由各个所述时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱;根据所述时延
‑
方位角谱,解算确定所述终端的位置。
16.上述定位方法、装置、计算机设备和存储介质,将信道频域响应向量转化为在基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量,建立解算方程,利用迭代最小化稀疏学习算法,对解算方程进行迭代估计,以确定由各个时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱,进而解算确定终端的位置。从而能够利用在基站的信号作用距离
‑
方位角域内的稀疏表示,根据接收的信号同时确定方位角的估计值和时延的估计值,有效提升了对终端的定位效率和定位精度。
附图说明
17.图1为一个实施例中定位方法的应用环境图;图2为一个实施例中定位方法的流程示意图;图3为另一个实施例中确定信道频域响应向量步骤的流程示意图;图4为另一个实施例中转化得到超完备响应向量步骤的流程示意图;图5为一个实施例中确定时延
‑
方位角谱步骤的流程示意图;图6为一个实施例中确定终端位置步骤的流程示意图;图7为一个实施例中二维空频music算法确定的距离
‑
方位角谱图;图8为一个实施例中二维slim算法确定的距离
‑
方位角谱图;图9为一个实施例中二维空频music算法和二维slim算法的方位角估计rmse图;图10为一个实施例中二维空频music算法和二维slim算法的距离估计rmse图;图11为一个实施例中定位装置的结构框图。
具体实施方式
18.为了使本申请的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本申请进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本申请,并不用于限定本申请。
19.本申请提供的定位方法,可以应用于如图1所示的应用环境中。其中,定位服务器102与一个或多个基站104通信连接。每个基站104可具有一个或多个天线阵,基站104通过基站104的每个天线阵具有的多个接收通道接收终端106的上行频域探测参考信号(sounding reference signal,srs),并且执行本申请各个实施例的定位方法,以对终端106进行定位。其中,终端106可以但不限于是各种个人计算机、笔记本电脑、智能手机、平板
电脑和便携式可穿戴设备等。基站104可以是5g基站,或者也可以是其他任何适用于本申请方法进行定位的类型的基站,本申请对此不作限定。
20.基站104可以是具有单个天线阵的小型基站,或具有分布的多个天线阵的基站,基站104的每个天线阵具有的一组阵元提供一组接收通道,基站104可以分别从其每个天线阵对应的一组接收通道接收来自终端106的一组上行频域探测参考信号,并分别针对每组上行频域探测参考信号执行本申请实施例的定位方法,以确定直达径的一对方位角估计值和时延估计值,然后基站104可以将其针对每个天线阵确定的每个直达径对应的方位角估计值和时延估计值发送至定位服务器102,定位服务器102可以从一个或多个基站104实时接收针对同一终端106的一个或多个直达径对应的方位角估计值和时延估计值,并基于接收的这些直达径对应的方位角估计值和时延估计值解算确定该终端106的位置。
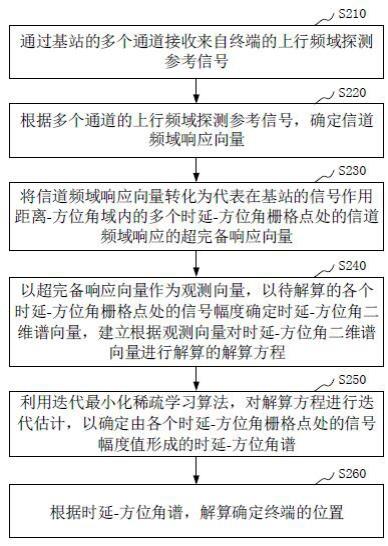
21.在一个实施例中,如图2所示,提供了一种定位方法,以该方法应用于图1中的基站104为例进行说明,包括以下步骤s210
‑
s260。
22.步骤s210,通过基站的多个通道接收来自终端的上行频域探测参考信号。
23.示例地,在本步骤中,基站102通过基站102的天线阵的多个接收通道接收终端发送的上行频域srs,设基站102的该天线阵共有n个阵元,则该天线阵共有n个接收通道,srs占用的子载波数量为m0,则从每个接收通道接收的上行频域srs可表示为向量,其中x
m,n
表示第n个接收通道、第m个子载波接收的频域srs。
24.步骤s220,根据多个通道的上行频域探测参考信号,确定信道频域响应向量。
25.在一个实施例中,如图3所示,步骤s220可以包括步骤s221、s223和s224。
26.步骤s221,根据多个通道的上行频域探测参考信号,确定多个通道的接收信号矩阵。
27.示例地,当在上一步骤s210中接收了每个接收通道的频域srs向量后,在本步骤中,基站102可以将所有通道的接收信号矩阵表示为:,其中表示复数空间,表示接收信号矩阵x为m0×
n维复数矩阵。
28.设srs频域发送序列为s[m], m = 1, 2,
ꢀ…
, m0,发送信号中心载频为f
c
,对应波长为λ,子载波间隔为δf,不失一般性,以接收信号的天线阵为等距线阵(uniform linear array, ula)为例,且该等距线阵的阵元间距为d。另外,假设信号传输的总路径数量为k,第k条径的时延、方位角、接收信号幅度分别为: 、和,其中,定义为信号入射方向与ula法线方向的夹角。可以理解,在本申请的各个实施例中,信号传输的时延可代表该信号传输的距离,时延与距离之间可以通过运算而相互转化。则多个通道的接收信号矩阵x可表示为:其中,,运算符表示以向量的每个元素作为主对角线元素,获得对角矩阵。为信号时延域匹配矢量,表示正交频分复用(orthogonal frequency division multiplexing, ofdm)信号时延域的匹配向量函
数,其输入为路径时延τ,t为所有可能的时延τ组成的空间,即,其中表示实数空间,输出为m维向量。根据信号时延在ofdm多载波上造成的相位差异,向量的第m个元素为:,,其中j代表虚数单位,有j
2 =
ꢀ‑
1。为空域导向矢量,表示接收阵列导向矢量函数,其输入为信号到达方位角θ,θ为所有可能的方位角组成的空间,即,输出为n维向量。的具体形式取决于阵列结构,当接收阵为ula时,其第n个元素为:,,为噪声矩阵,其第m行第n列的元素表示第m个子载波、第n个接收通道上的噪声分量。
[0029]
步骤s222,根据接收信号矩阵,进行信道估计,得到信道频域响应矩阵。
[0030]
示例地,在本步骤中,基站104的信道估计模块根据多个接收通道接收的频域srs构成的接收信号矩阵,进行信道估计,得到信道频域响应矩阵,假设接收机利用已知的srs序列进行信道估计,则执行多通道频域信道估计得到的信道频域响应矩阵可表示为:上式中,表示信道频域响应矩阵,其第n列为第n个接收通道估计的信道频域响应。表示信道频域响应矩阵中的噪声分量。
[0031]
在一个实施例中,可选地,在步骤s222之后,在步骤s224之前,还可以包括:步骤s223,对信道频域响应矩阵的子载波维度进行降维处理。
[0032]
当基站102为5g基站时,由于5g信道中,子载波间隔较小,子载波数量较大,而空域和频域两维联合后,信号维度较大,为降低运算量,基站104对信道估计矩阵的子载波维进行降维处理,即对信道估计矩阵的子载波维进行抽取,记抽取率为v,抽取后得到的信道频域响应矩阵为,其中,,表示向下取整运算符,则h矩阵第m行元素可表示为:其中,表示矩阵h第m行的所有元素,表示矩阵的vm行的所有元素。
[0033]
步骤s224,对信道频域响应矩阵进行向量化,得到信道频域响应向量。
[0034]
示例地,在本步骤中,基站104对前述步骤得到的信道频域响应矩阵进行向量化,得到信道频域响应向量,其中,vec(
·
)表示矩阵向量化运算符,有:上式中,表示噪声向量,表示空域和时延域两维联合匹配矢量函数,两个输入参数分别为时延τ和方位角θ,如前所述,t和θ分别为所有时延和方位角构成的空间,且有:上式中,和分别为步骤s221中引入的信号时延域匹配矢量以及空域
导向矢量。
[0035]
步骤s230,将信道频域响应向量转化为代表在基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量。
[0036]
在一个实施例中,如图4所示,步骤s230可以包括步骤s231
‑
步骤s234。
[0037]
步骤s231,获取基站的天线阵的作用距离范围和接收方位角范围;在一个实施例中,获取基站的天线阵的作用距离范围和接收方位角范围包括:根据基站的天线阵的结构信息以及天线阵的朝向信息,确定天线阵的接收方位角范围;根据终端的发射功率以及天线阵的灵敏度,确定天线阵的最大作用距离,根据最大作用距离确定天线阵的作用距离范围。
[0038]
示例地,在本步骤中,基站104根据终端的发射功率、基站接收机的灵敏度等指标,确定基站天线阵的最大作用范围,从而确定基站天线阵能接收srs的最大时延,该最大时延即可代表天线阵的最大作用距离,如此,天线阵能接受srs的时延范围为,该时延范围为即可代表天线阵的作用距离范围;根据基站的天线阵结构以及阵元方向图主瓣宽度,确定基站天线阵的接收方位角范围。
[0039]
步骤s232,基于作用距离范围和接收方位角范围,确定天线阵的作用距离
‑
方位角域。
[0040]
步骤s233,使用均匀栅格对作用距离
‑
方位角域进行分割,以确定作用距离
‑
方位角域上均匀分布的多个时延
‑
方位角栅格点。
[0041]
示例地,在本步骤中,基站104使用均匀栅格、对时延范围、接收方位角范围进行划分,从而确定时延范围和接收方位角范围共同确定的二维作用距离
‑
方位角域内均匀分布的多个时延
‑
方位角栅格点。其中,每个时延
‑
方位角栅格点可对应有一个时延
‑
方位角坐标对,示例地,该时延
‑
方位角坐标对可以为该对应的时延
‑
方位角栅格点处的时延和方位角形成的坐标对。每个时延
‑
方位角栅格点还可以用下标来表示,其中,p表示时延域栅格点编号,p表示时延域总栅格点数,表示第p个时延域栅格点对应的时延,q表示方位角域栅格点编号,q表示方位角域总栅格点数,表示第q个方位角域栅格点对应的方位角。从而时延
‑
方位角栅格点(p, q)对应有时延
‑
方位角坐标对(, )。
[0042]
步骤s234,将信道频域响应矩阵转化为在多个时延
‑
方位角栅格点处的超完备响应向量。
[0043]
示例地,在本步骤中,基站104假设存在、,,使得、,其中,k表示路径编号,k表示环境中的总路径数,包括一条直达径以及(k
ꢀ‑ꢀ
1)条反射径,表示第k条路径时延对应在时延域栅格集合中的编号,表示第k条路径方位角对应在方位角域栅格集合中的编号,且以表示第p个时延域栅格点以及第q个方位角域栅格点上的幅度,根据以上假设,有在,时为,k= 1, 2,
ꢀ…
, k,在其它栅格上。自此基站104得到了信道频域响应矩阵在二维空间上的超完备表示,可重新表示为超完备响应向量:
上式中,表示时延为τ
p
、方位角为θ
q
时的空域
‑
时延域两维匹配矢量,。其中,、作为可替代的输入变量,的具体形式可同理地参阅的具体形式;、作为可替代的输入变量,的具体形式可同理地参阅的具体形式。
[0044]
步骤s240,以超完备响应向量作为观测向量,以待解算的各个时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据观测向量对时延
‑
方位角二维谱向量进行解算的解算方程。
[0045]
示例地,在本步骤中,记示例地,在本步骤中,记上述表示空域
‑
时延域二维匹配矩阵,γ表示幅度向量,它们的维度分别为mn
×
pq以及pq
×
1。因此,可将前述步骤得到的超完备响应向量转化为解算方程:至此,基站104将方位角和距离(时延)的估计问题转化为根据以超完备响应向量为观测向量对时延
‑
方位角二维谱向量γ进行求解的重构问题。
[0046]
步骤s250,利用迭代最小化稀疏学习算法,对解算方程进行迭代估计,以确定由各个时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱。
[0047]
针对步骤s240建立的解算方程,基站104根据解算方程确定l1范数正则化最小二乘问题的目标函数,利用迭代最小化稀疏学习(sparse learning via iterative minimization,slim)算法,通过循环最小化算法迭代地对该目标函数进行求解来获得上述解算方程的稀疏解。示例地,该目标函数表示为:其中,η为噪声功率,为向量γ的l1范数。表示向量的l2范数。
[0048]
slim算法是一种无参数的稀疏重构类算法,所有参数都在迭代过程中求解,避免了参数选取不准确对结果的影响,实用性较强。
[0049]
在一个实施例中,如图5所示,步骤s250包括步骤s251
‑
步骤s254。
[0050]
步骤s251,基于超完备响应向量,确定匹配矩阵,进行二维空频匹配滤波,得到时延
‑
方位角二维谱向量的初始估计值;示例地,在本步骤中,基站104对算法进行初始化,初始化时,以基于超完备响应向量确定的解算方程中的为匹配矩阵,进行二维空频匹配滤波,得到时延
‑
方位角二维谱向量γ的初始估计值:
上式中,m表示抽取后子载波总数,n表示天线阵的阵元数,(
·
)
h
表示对矩阵或向量取共轭转置的运算符。
[0051]
步骤s252,根据时延
‑
方位角二维谱向量的初始估计值,计算估计均方误差,作为噪声功率的初始估计值;示例地,在本步骤中,基站104根据时延
‑
方位角二维谱向量γ的初始估计值计算估计均方误差,作为噪声功率η的初始估计值:步骤s253,基于时延
‑
方位角二维谱向量的初始估计值和噪声功率的初始估计值,迭代更新功率矩阵的估计值、时延
‑
方位角二维谱向量的估计值以及噪声功率的估计值,直至当前迭代次数的时延
‑
方位角二维谱向量的估计值与上一迭代次数的时延
‑
方位角二维谱向量的估计值之间的变化度值小于预定阈值时,停止迭代更新;示例地,在本步骤中,基站104基于二维空频匹配滤波得到的时延
‑
方位角二维谱向量γ的初始估计值γ(0)以及噪声功率η的初始估计值η(0),slim算法迭代地更新功率矩阵的估计值、时延
‑
方位角二维谱向量γ的估计值和噪声功率η的估计值,记i表示第i次迭代,相应地,p(i)、γ(i)和η(i)分别表示第i次迭代得到的功率矩阵、时延
‑
方位角二维谱向量以及噪声功率,迭代过程分别如下:更新功率矩阵:更新γ:上式中,表示mn维单位矩阵。
[0052]
更新η:在每执行一次更新后,基站104判断算法是否收敛,可以认为前后两次γ向量的估计值结果不再改善时,即前后两次γ向量的估计值之间的变化度值小于预定阈值时,算法收敛。变化度值是表征前后两次γ向量的估计值之间的变化程度的数值,变化度值例如可以是当前次数的γ向量的估计值与前一次数的γ向量的估计值之差的l2范数平方除以前一次数的γ向量的估计值的l2范数的平方得到的值,即满足下式时可判定算法收敛:ε为设定的门限值。当算法收敛时,得到时延
‑
方位角二维谱的估计值:。
[0053]
slim算法收敛速度较快,一般能够在15次迭代以内收敛。
[0054]
步骤s254,获取停止迭代更新时的当前迭代次数的时延
‑
方位角二维谱向量的估计值对应的各个时延
‑
方位角栅格点处的信号幅度值,基于各个时延
‑
方位角栅格点处的信
号幅度值,形成对应的时延
‑
方位角谱。
[0055]
示例地,在本步骤中,在算法收敛时,即停止迭代更新时,确定的时延
‑
方位角二维谱的估计值中,包含有确定的各个时延
‑
方位角栅格点处的信号幅度值,而每个时延
‑
方位角栅格点 (p, q) 对应有时延
‑
方位角坐标对,从而基站104可以基于各个时延
‑
方位角栅格点 (p, q) 对应的时延
‑
方位角坐标对和信号幅度值,生成对应的时延
‑
方位角谱。
[0056]
步骤s260,根据时延
‑
方位角谱,解算确定终端的位置。
[0057]
在一个实施例中,如图6所示,步骤s260包括步骤s261
‑
步骤s263。
[0058]
步骤s261,提取时延
‑
方位角谱中的多个谱峰,以确定多个路径对应的多对方位角估计值和时延估计值;示例地,在本步骤中,基站104将各个谱峰对应的时延
‑
方位角栅格点的时延
‑
方位角坐标对中的方位角和时延,确定为各路径的时延估计值和方位角估计值,,为谱峰总数,表示路径编号,表示第条路径的时延估计值,表示第条路径的方位角估计值。各路径的方位角和时延估计值为本发明所提出的定位系统中的参数估计/测量模块的输出。
[0059]
步骤s262,根据多个路径对应的多对方位角估计值和时延估计值,从多个路径中确定直达径;示例地,在本步骤中,基站104的直达径识别模块根据多帧的各路径的方位角和时延特性,综合利用直达径比多径时延短、多帧间直达径比多径方差小等准则,从多个路径中确定直达径。
[0060]
步骤s263,基于直达径对应的方位角估计值和时延估计值,解算确定终端的位置。
[0061]
在本步骤中,基站104可以将其确定的直达径对应的方位角估计值和时延估计值发送至定位服务器102,由定位服务器102中的定位跟踪模块基于接收的直达径对应的方位角估计值和时延估计值,使用最小二乘方法、卡尔曼滤波算法或粒子滤波等算法,实现终端106坐标的解算以及其连续定位和跟踪。
[0062]
上述定位方法中,将信道频域响应向量转化为在基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量,建立解算方程,利用迭代最小化稀疏学习算法,对解算方程进行迭代估计,以确定由各个时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱,进而解算确定终端的位置。从而能够利用在基站的信号作用距离
‑
方位角域内,接收信号中路径数的稀疏分布特性,根据接收的信号同时确定方位角的估计值和时延的估计值,有效提升了对终端的定位效率和定位精度。
[0063]
应该理解的是,虽然图2
‑
6的流程图中的各个步骤按照箭头的指示依次显示,但是这些步骤并不是必然按照箭头指示的顺序依次执行。除非本文中有明确的说明,这些步骤的执行并没有严格的顺序限制,这些步骤可以以其它的顺序执行。而且,图2
‑
6中的至少一部分步骤可以包括多个子步骤或者多个阶段,这些子步骤或者阶段并不必然是在同一时刻执行完成,而是可以在不同的时刻执行,这些子步骤或者阶段的执行顺序也不必然是依次进行,而是可以与其它步骤或者其它步骤的子步骤或者阶段的至少一部分轮流或者交替地执行。
[0064]
仿真实验存在一种基于wifi信号的空频二维多重信号分类(multiple signal classification,music)算法对方位角、距离和信号幅度进行估计的方法,在该方法中,首先对多通道wifi接收机物理层反馈的信道状态信息 (channel state information, csi) 进行重排,并结合空域和频域的联合匹配矢量进行距离
‑
方位角二维谱估计,随后通过二维谱峰搜索实现距离和方位角的同时估计。
[0065]
基于空频二维music算法对方位角、距离和信号幅度进行估计的方法存在如下问题:(1)在存在多径引起的相干信号时,music算法中的采样协方差阵会出现秩亏现象,导致信号子空间扩散至噪声子空间,算法失效;(2)为解决相干信号谱估计问题,可采用基于空间平滑的解相干music算法,然而空间平滑一方面会导致孔径损失,另一方面也增大了运算量;(3)music算法要求已知入射信号个数,在实际环境中,这个参数不容易获得;(4)music算法性能依赖于协方差矩阵估计的准确度,因此在少快拍和低snr下,算法性能显著恶化。
[0066]
通过仿真实验对比多径环境下,二维空频music算法和本申请所提出的定位方法中确定的方位角和时延估计值的精度。仿真实验中,设置srs信号中心频率2.565 ghz,子载波间隔为30 khz,srs占据子载波个数为3264,天线阵的接收阵元数为4,接收阵元间距为5.8 cm。
[0067]
设置6条相干路径,在每次蒙特卡洛实验中,路径的方位角和传播距离分别在[
‑
60
°
, 60
°
]和[5m, 30m]的区间内随机选取,每次蒙特卡洛实验中考虑5组信噪比(signal
‑
to
‑
noise ratio,snr),分别为
‑
10db、
‑
5db、0db、5db、10db。
[0068]
在对实验数据的处理过程中,在二维music处理前增加了空频平滑处理,以使其能够处理相干信号。以某次蒙特卡洛实验为例,6条路径的真实方位角和距离分别为:[34.6196
°
, 14.5595
°
,
ꢀ‑
24.3652
°
, 50.3258
°
, 19.6609
°
, 26.7446
°
]和[27.6448m, 7.4385m, 18.6720m, 29.1222m, 23.9435m, 14.8057m],当snr = 0db时,平滑后二维空频music的距离
‑
方位角谱如图7所示,二维slim算法得到的相应结果如图8所示。图7与图8中,谱峰用x号表示,目标真实位置用o表示。从图中能够看到,整体上,使用二维slim稀疏重构算法能够获得更准确的路径参数估计。
[0069]
最后,统计了400次蒙特卡洛实验中,空频二维music算法和空频二维slim稀疏重构算法对所有路径的方位角和距离的估计精度,并分别以均方根误差(root mean square error, rmse)来表达,分别如图9和图10所示。其中,方位角rmse的计算方法如下:其中,表示方位角θ的rmse,k为路径个数,l为蒙特卡洛实验次数,为第l次实验第k个路径的方位角真实值,为第l次实验第k个路径的方位角估计值。距离rmse的计算方法如下:其中,表示距离r的rmse,为第l次实验第k个路径的方位角真实值,为第l次实验第k个路径的方位角估计值。
[0070]
从统计结果能够看到,空频二维slim稀疏重构算法的方位角和距离估计精度均优于空频二维music算法。
[0071]
本申请实施例提出的基于上行信号的方位角
‑
距离超分辨估计方法中,为解决其中的方位角、距离同时超分辨估计问题,提出利用信道频域响应矩阵信号模型中,方位域和距离域的稀疏性,建立解算方程,并使用slim算法对解算方程进行求解。相比于二维空频music算法,本申请使用空频二维slim稀疏重构算法的方位角和距离估计具有以下优点:(1)能够直接处理相干信源,无需进行平滑操作;(2)无需信源个数先验;(3)单快拍情况下,测角和测距精度均优于二维空频music算法。
[0072]
在一个实施例中,如图11所示,提供了一种定位装置1100,包括:探测参考信号接收模块1110、信道频域响应向量确定模块1120、超完备响应向量确定模块1130、解算方程建立模块1140、时延
‑
方位角谱确定模块1150和位置确定模块1160,其中:探测参考信号接收模块1110,用于通过基站的多个通道接收来自终端的上行频域探测参考信号;信道频域响应向量确定模块1120,用于根据多个通道的上行频域探测参考信号,确定信道频域响应向量;超完备响应向量确定模块1130,用于将信道频域响应向量转化为代表在基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量;解算方程建立模块1140,用于以超完备响应向量作为观测向量,以待解算的各个时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据观测向量对时延
‑
方位角二维谱向量进行解算的解算方程;时延
‑
方位角谱确定模块1150,用于利用迭代最小化稀疏学习算法,对解算方程进行迭代估计,以确定由各个时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱;位置确定模块1160,用于根据时延
‑
方位角谱,解算确定终端的位置。
[0073]
关于定位装置1100的具体限定可以参见上文中对于定位方法的限定,在此不再赘述。上述定位装置1100中的各个模块可全部或部分通过软件、硬件及其组合来实现。上述各模块可以硬件形式内嵌于或独立于计算机设备中的处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上各个模块对应的操作。
[0074]
在一个实施例中,提供了一种基站,该基站包括基带处理单元以及一个或多个与基带处理单元连接的天线处理单元,每个天线处理单元包括至少一个天线阵,每个天线阵由多个阵元排列而成;每个天线阵包括的多个阵元单元提供对应的多个接收通道。其中,基带处理单元通过各个天线处理单元的天线阵提供的多个接收通道接收来自终端的上行频域探测参考信号,并执行本申请上述任意实施例的定位方法,以对终端进行定位。
[0075]
基带处理单元可以对从天线阵接收的信号进行处理,示例地,基带处理单元可以包括室内基带处理单元(building base band unit,bbu),或者可以包括集中单元(centralized unit,cu)和分布单元(distributed unit,du),或者其他能够实现本申请实施例所需的信号处理功能的任意结构。
[0076]
每个天线处理单元可以包括与基带处理单元连接的射频拉远单元(remote radio unit)以及通过馈线与射频拉远单元连接的天线阵,或者可以包括与基带处理单元连接的有源天线单元(active antenna unit,aau),该有源天线单元内集成有天线阵,或者也可以
是包括天线阵的其他任意合适的结构。
[0077]
进一步地,在一个实施例中,该基站的基带处理单元与定位服务器通信连接,该基在通过上述任意实施例的定位方法确定直达径对应的方位角估计值和时延估计值,并将确定的直达径对应的方位角估计值和时延估计值发送至定位服务器,由定位服务器对直达径的方位角估计值和时延估计值进行连续的跟踪滤波,实现对终端的定位。
[0078]
在另一个实施例中,基站的基带处理单元也可以直接在本端对确定的直达径的方位角估计值和时延估计值进行连续的跟踪滤波,实现对终端的定位。
[0079]
在一个实施例中,提供了一种定位系统,该定位系统包括定位服务器以及一个或多个如上任意实施例的基站,该一个或多个基站分别与定位服务器通信连接。其中每个基站分别接收终端的上行频域探测参考信号,并且执行本申请上述各个实施例的定位方法,以对终端进行定位。
[0080]
在一个实施例中,提供了一种计算机设备,包括存储器和处理器,存储器中存储有计算机程序,该处理器执行计算机程序时实现以下步骤:通过基站的多个通道接收来自终端的上行频域探测参考信号;根据多个通道的上行频域探测参考信号,确定信道频域响应向量;将信道频域响应向量转化为代表在基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量;以超完备响应向量作为观测向量,以待解算的各个时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据观测向量对时延
‑
方位角二维谱向量进行解算的解算方程;利用迭代最小化稀疏学习算法,对解算方程进行迭代估计,以确定由各个时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱;根据时延
‑
方位角谱,解算确定终端的位置。
[0081]
在其他实施例中,处理器执行计算机程序时还实现如上任意实施例的定位方法的步骤,并具有相应的有益效果。
[0082]
在一个实施例中,提供了一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现以下步骤:通过基站的多个通道接收来自终端的上行频域探测参考信号;根据多个通道的上行频域探测参考信号,确定信道频域响应向量;将信道频域响应向量转化为代表在基站的信号作用距离
‑
方位角域内的多个时延
‑
方位角栅格点处的信道频域响应的超完备响应向量;以超完备响应向量作为观测向量,以待解算的各个时延
‑
方位角栅格点处的信号幅度确定时延
‑
方位角二维谱向量,建立根据观测向量对时延
‑
方位角二维谱向量进行解算的解算方程;利用迭代最小化稀疏学习算法,对解算方程进行迭代估计,以确定由各个时延
‑
方位角栅格点处的信号幅度值形成的时延
‑
方位角谱;根据时延
‑
方位角谱,解算确定终端的位置。
[0083]
在其他实施例中,计算机程序被处理器执行时还实现如上任意实施例的定位方法的步骤,并具有相应的有益效果。
[0084]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分流程,是可以通过计算机程序来指令相关的硬件来完成,所述的计算机程序可存储于一非易失性计算机可读取存储介质中,该计算机程序在执行时,可包括如上述各方法的实施例的流程。其中,本申请所提供的各实施例中所使用的对存储器、存储、数据库或其它介质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。作为说明而非局限,ram以多种形式可得,诸如静态ram(sram)、动态ram(dram)、同步dram(sdram)、双数据率sdram(ddrsdram)、增强型sdram(esdram)、同步链路(synchlink)dram(sldram)、存储器总线(rambus)直接ram(rdram)、直接存储器总线动态ram(drdram)、以及存储器总线动态ram(rdram)等。
[0085]
以上实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0086]
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1