图像处理方法、图像处理装置、电子设备及可读存储介质与流程
1.本技术涉及图像技术领域,特别涉及一种图像处理方法、图像处理装置、电子设备及非易失性计算机可读存储介质。
背景技术:
2.由于终端中的不同的图像处理应用对raw格式的文件的解析方式或编码方式的不同,由一个图像处理应用编码的raw文件有可能不能被另一个图像处理应用解析。并且单帧raw图像具有较高的噪点及不佳的动态范围。
技术实现要素:
3.本技术实施方式提供了一种图像处理方法、图像处理装置、电子设备及非易失性计算机可读存储介质。
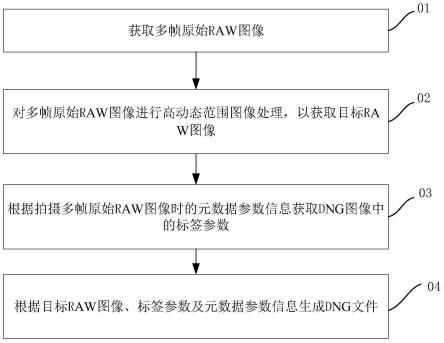
4.本技术实施方式提供一种图像处理方法。所述图像处理方法包括:获取多帧原始raw图像;对多帧所述原始raw图像进行高动态范围图像处理,以获取目标raw图像;根据拍摄多帧所述原始raw图像时的元数据参数信息获取dng图像中的标签参数;及根据所述目标raw图像、所述标签参数及所述元数据参数信息生成dng文件。
5.本技术实施方式提供一种图像处理装置。所述图像处理装置包括图像传感器及一个或多个处理器。所述图像传感器中的像素阵列曝光以获取多帧原始raw图像。一个或多个所述处理器用于:对多帧所述原始raw图像进行高动态范围图像处理,以获取目标raw图像;根据拍摄多帧所述原始raw图像时的元数据参数信息获取dng图像中的标签参数;及根据所述目标raw图像、所述标签参数及所述元数据参数信息生成dng文件。
6.本技术实施方式提供一种电子设备。所述电子设备包括镜头及图像处理装置,所述镜头与所述图像处理装置的图像传感器配合成像。所述图像处理装置包括图像传感器及一个或多个处理器。所述图像传感器中的像素阵列曝光以获取多帧原始raw图像。一个或多个所述处理器用于:对多帧所述原始raw图像进行高动态范围图像处理,以获取目标raw图像;根据拍摄多帧所述原始raw图像时的元数据参数信息获取dng图像中的标签参数;及根据所述目标raw图像、所述标签参数及所述元数据参数信息生成dng文件。
7.本技术实施方式提供一种包含计算机程序的非易失性计算机可读存储介质。所述计算机程序被处理器执行时,使得所述处理器执行权利要求1至11任意一项所述的图像处理方法。所述图像处理方法包括:获取多帧原始raw图像;对多帧所述原始raw图像进行高动态范围图像处理,以获取目标raw图像;根据拍摄多帧所述原始raw图像时的元数据参数信息获取dng图像中的标签参数;及根据所述目标raw图像、所述标签参数及所述元数据参数信息生成dng文件。
8.本技术中的图像处理方法、图像处理装置、电子设备及计算机可读存储介质,通过对多帧raw图像进行高动态融合获得目标raw图像后,再将目标raw图转换为dng文件。如此,一方面有多帧raw图像合成的目标raw图像相较于单帧raw图像,图像信息量更大、动态范围
更广并且清晰度更高;另一方面,由于将目标raw图转换为具有统一编码及解析格式的dng文件,有利于用户将该dng文件导出至后期软件中进行处理。
9.本技术实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
附图说明
10.本技术的上述和/或附加的方面和优点可以从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
11.图1是本技术某些实施方式的图像处理方法的流程示意图;
12.图2是本技术某些实施方式的图像处理装置的结构示意图;
13.图3是本技术某些实施方式的图像处理装置中图像传感器的示意图;
14.图4至图9是本技术某些实施方式的图像处理方法的流程示意图;
15.图10是本技术某些实施方式中对第一参考图像进行第一灰度处理获得第一灰度图像的示意图;
16.图11至图12是本技术某些实施方式的图像处理方法的流程示意图;
17.图13是本技术某些实施方式中配准后灰度图像的运动区域与对应的配准后的原始raw图像运动区域的示意图;
18.图14是本技术某些实施方式的图像处理方法的流程示意图;
19.图15是本技术某些实施方式的获取中间raw图像的原理示意图;
20.图16是本技术某些实施方式的图像处理方法的流程示意图;
21.图17是本技术某些实施方式的获取去鬼影后的中间raw图像的原始示意图;
22.图18是本技术某些实施方式的图像处理方法的流程示意图;
23.图19是本技术某些实施方式中对第二基准图像进行第二灰度处理获得第二灰度图像的示意图;
24.图20至图25是本技术某些实施方式的图像处理方法的流程示意图;
25.图26是本技术某些实施方式中获取的dng图像及目标图像的示意图;
26.图27本技术某些实施方式的电子设备的结构示意图;
27.图28是本技术某些实施方式的非易失性计算机可读存储介质与处理器的交互示意图。
具体实施方式
28.下面详细描述本技术的实施方式,所述实施方式的示例在附图中示出,其中,相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施方式是示例性的,仅用于解释本技术的实施方式,而不能理解为对本技术的实施方式的限制。
29.请参阅图1,本技术实施方式提供一种图像处理方法。图像处理方法包括:
30.01:获取多帧原始raw图像;
31.02:对多帧原始raw图像进行高动态范围图像处理,以获取目标raw图像;
32.03:根据拍摄多帧原始raw图像时的元数据参数信息获取dng图像中的标签参数;
及
33.04:根据目标raw图像、标签参数及元数据参数信息生成dng文件。
34.请参阅图1及图2,本技术实施方式还提供一种图像处理装置100。图像处理装置100包括图像传感器10及一个或多个处理器20,步骤01图像传感器10实现,步骤02、步骤03及步骤04均可以由一个或多个处理器20执行。也即是说,图像传感器10中的像素阵列11(图3所示)曝光以获取多帧原始raw图像;一个或多个处理器20用于:对多帧原始raw图像进行高动态范围图像处理,以获取目标raw图像;根据拍摄多帧原始raw图像时的元数据参数信息获取dng图像中的标签参数;及根据目标raw图像、标签参数及元数据参数信息生成dng文件。
35.本技术中的图像处理方法及图像处理装置100通过对多帧raw图像进行高动态融合获得目标raw图像后,再将目标raw图转换为dng文件。如此,一方面有多帧raw图像合成的目标raw图像相较于单帧raw图像,图像信息量更大、动态范围更广并且清晰度更高;另一方面,由于将目标raw图转换为具有统一编码及解析格式的dng文件,有利于用户将该dng文件导出至后期软件中进行处理。
36.具体地,请参阅图3,图像传感器10包括像素阵列11,其中像素阵列11曝光,以获取原始raw图像。需要说明的是,在一些实施例中,像素阵列11包括以阵列形式二维排列(即二维矩阵形式排布)的多个感光像素(图未示),每个感光像素根据入射在其上的光的强度将光转换为电荷。
37.在一些实施例中,多帧原始raw图像以至少两种不同的曝光值曝光,即像素阵列11以至少两种不同的曝光值曝光,以获取多帧原始raw图像,并且多帧原始raw图像中至少两帧原始raw图像是一不同曝光值曝光获得的。
38.具体地,在一些实施例中,多帧原始raw图像包括以标定曝光值曝光的第一原始raw图像及以不同于标定曝光值曝光的第二原始raw图像。即像素阵列11以标定曝光值曝光获取第一原始raw图像,以不同于标定曝光值的曝光值曝光获取第二原始raw图像。
39.例如,多帧原始raw图像包括以标定曝光值曝光的第一原始raw图像、及以大于标定曝光值曝光的第二原始raw图像。需要说明的是,第一原始raw图像的数量可以大于第二原始raw图像的数量;或者第一原始raw图像的数量也可以小于第二原始raw图像的数量;或者第一原始raw图像的数量还可以等于第二原始raw图像数量,在此不作限制。此外,在一些实施例中,多帧第二原始raw图像也可以以至少两种不同的曝光值曝光,但无论以多少种曝光值曝光以获取第二原始raw图像,多种获取第二原始raw图像的曝光值均大于标定曝光值。
40.再例如,在一些实施例中,多帧原始raw图像也可以包括以标定曝光值曝光的第一原始raw图像、及以小于标定曝光值曝光的第二原始raw图像。需要说明的是,第一原始raw图像的数量可以大于第二原始raw图像的数量;或者第一原始raw图像的数量也可以小于第二原始raw图像的数量;或者第一原始raw图像的数量还可以等于第二原始raw图像数量,在此不作限制。此外,在一些实施例中,多帧第二原始raw图像也可以以至少两种不同的曝光值曝光,但无论以多少种曝光值曝光以获取第二原始raw图像,多种获取第二原始raw图像的曝光值均小于标定曝光值。
41.在一些实施例中,多帧原始raw图像包括以标定曝光值曝光的第一原始raw图像、
以大于标定曝光值曝光的第二原始raw图像、及以小于标定曝光值曝光的第三原始raw图像。需要说明的是,第一原始raw图像、第二原始raw图像及第三原始raw图像的数量可以均相等;或者第一原始raw、第二原始raw图像及第三原始raw图像的数量可以不相同,在此不作限制。此外,在一些实施例中,多帧第二原始raw图像也可以以至少两种不同的曝光值曝光,但无论以多少种曝光值曝光以获取第二原始raw图像,多种获取第二原始raw图像的曝光值均大于标定曝光值。同样地,在一些实施例中,多帧第三原始raw图像也可以以至少两种不同的曝光值曝光,但无论以多少种曝光值曝光以获取第三原始raw图像,多种获取第三原始raw图像的曝光值均小于标定曝光值。由于图像处理装置100在获取到多帧原始raw图像后,会对多帧原始raw图像进行高动态融合处理,如此将包含以三种不同曝光值曝光获得的原始raw图像高动态融合后获得的目标raw图,相较于将包含以两种不同曝光值曝光获得的原始raw图像高动态融合后获得的目标raw图,具有更高的动态范围及更好的图像质量。
42.需要说明的是,在一些实施例中,图像处理装置100中预选存储了多种获取多帧原始raw图像的预设曝光策略,用户可根据实际需求选取预设曝光策略,以获取多帧原始raw图像。如此,最后获得的目标raw图像更能满足用户需求。其中,预设曝光策略包括但不限于以下几种中的至少一种:(1)以标定曝光值曝光以获取多帧第一原始raw图像,以小于标定曝光值的曝光值曝光以获取一帧第二原始raw图像;(2)以标定曝光值曝光以获取一帧第一原始raw图像,以小于标定曝光值的曝光值曝光以获取多帧第二原始raw图像;(3)以标定曝光值曝光以获取第一原始raw图像,以大于标定曝光值的曝光值曝光以获取第二原始raw图像,以小于标定曝光值的曝光值曝光以获取第三原始raw图像。当然,在一些实施例中,用户也可以直接设置曝光策略,以获取多帧原始raw图像,在此不作限制。
43.请参阅图4,在一些实施例中,图像处理方法还包括:
44.051:对环境进行测光,及根据测得的环境亮度获取标定曝光值;
45.步骤01:获取多帧原始raw图像,包括:
46.011:获取以标定曝光值曝光的第一原始raw图像及以不同于标定曝光值曝光的第二原始raw图像。
47.请参阅图2及图4,在一些实施例中,步骤011由图像传感器10实现,步骤051由一个或多个处理器20执行。也即是说,一个或多个处理器20还用于对环境进行测光,及根据测得的环境亮度获取标定曝光值。图像传感器10还用于获取以标定曝光值曝光的第一原始raw图像及以不同于标定曝光值曝光的第二原始raw图像。
48.具体地,处理器20检测图像处理装置100,或者安装有图像处理装置100的电子设备1000(图27所示)的周围环境的亮度,以获得环境亮度。在获得环境亮度之后,处理器20根据环境亮度获取标定曝光值。需要指出的是,在该环境亮度下,以标定曝光值曝光能够获得较为清晰,图像品质较为好的原始raw图像。示例地,在一些实施例中,图像处理装置100中存储有预设的环境亮度与曝光值对应表,处理器20根据获取到的环境亮度,在预设的环境亮度与标定曝光值对应表中查找对应的曝光值,并将对应的曝光值作为标定曝光值。
49.请参阅图5,在一些实施例中,图像处理方法还包括:
50.052:根据用户确定的曝光参数获取标定曝光值,其中曝光参数包括曝光值、感光度及曝光时长中的至少一种。
51.请参阅图2及图5,在一些实施例中,步骤052由一个或多个处理器20执行。也即是
说,一个或多个处理器20还用于根据用户确定的曝光参数获取标定曝光值,其中曝光参数包括曝光值、感光度及曝光时长中的至少一种。
52.具体地,请参阅图5及图6,在一些实施例中,步骤052:根据用户确定的曝光参数获取标定曝光值,其中曝光参数包括曝光值、感光度及曝光时长中的至少一种,还包括:
53.0521:对环境进行测光;
54.0522:根据测得环境亮度获取曝光的初始参数;及
55.0523:根据用户输入调节初始参数以获取曝光参数。
56.请参阅图2及图6,在一些实施例中,步骤0521、步骤0522及步骤0523均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于对环境进行测光;根据测得环境亮度获取曝光的初始参数;及根据用户输入调节初始参数以获取曝光参数。
57.具体地,处理器20检测图像处理装置100,或者安装有图像处理装置100的电子设备1000(图27所示)的周围环境的亮度,以获得环境亮度。在获得环境亮度之后,处理器20根据环境亮度获取初始参数。示例地,在一些实施例中,图像处理装置100中存储有预设的环境亮度与曝光初始参数对应表,处理器20根据获取到的环境亮度,在预设的环境亮度与曝光初始参数对应表中查找对应的曝光初始参数。需要说明的是,曝光参数包括曝光值、曝光时间及感光度中至少一种。
58.用户可以根据实际需求对初始参数进行调节,处理器20将用户调节后的初始参数作为用户确定的曝光参数。处理器20在获取用户确定的曝光参数后,根据用户确定的曝光参数获取标定曝光值。具体地,在一些实施例中,曝光参数包括曝光值、曝光时间及感光度,即初始参数包括初始曝光值、初始曝光时间及初始感光度。在获取初始参数后,若用户没有调节初始参数,即用户没有调节获得的初始曝光值、初始曝光时间及初始感光度,则将初始曝光值作为标定曝光值;若用户仅调节了初始曝光值,则将用户调节后的初始曝光值作为标定曝光值;若用户调节了初始曝光时间及初始感光度,则以用户调节后的初始曝光时间及用户调节后的初始感光度组合后的曝光值作为标定曝光值。需要说明的是,在一些实施例中,在获取初始参数后,用户仅调节了初始曝光时间,说明调节后的曝光时间为用户期望的曝光时间,则多帧原始raw的曝光时间均为调节后的初始曝光时间,以初始感光度及用户调节后的初始曝光时间组合后的曝光值作为标定曝光值,通过调节感光度以获得以不同于标定曝光值曝光的原始raw图像。同样地,用户仅调节了初始感光度,说明调节后的感光度为用户期望的曝光时间,则多帧原始raw的感光度均为调节后的感光度,以初始曝光时间及用户调节后的初始感光度组合后的曝光值作为标定曝光值,通过调节曝光时间以获得以不同于标定曝光值曝光的原始raw图像。由于根据环境亮度获取初始参数后,用户仅需要根据需求对初始参数进行调节,相较于用户直接输入曝光参数,能够使最终获得地目标图像满足用户需求的同时,降低用户的操作难度。
59.当然,在一些实施例中,用户还可以直接输入以获取曝光参数,处理器20根据用户输入的曝光参数获取标定曝光值。示例地,若用户仅输入曝光值,则以用户输入的曝光值作为标定曝光值;若用户输入感光度及曝光时间,则以用户输入的感光度及曝光时间组合后的曝光值作为标定曝光值。
60.在获取到标定曝光值后,图像传感器10中的像素阵列11以标定曝光值曝光以获取第一原始raw图像,以不同于标定曝光值曝光以获取第二原始raw图像。具体获取方式与上
述实施例中所述的以标定曝光值曝光以获取第一原始raw图像,以不同于标定曝光值曝光以获取第二原始raw图像相同,在此不做赘述。
61.请参阅图7,在一些实施例中,图像处理方法还包括:
62.06:对原始raw图像进行前处理,前处理包括:线性校正、坏点校正处理、黑电平校正处理及镜头阴影校正处理中至少一种;
63.步骤02:对多帧原始raw图像进行高动态范围图像处理,以获取目标raw图像,包括:
64.021:对多帧处理后的原始raw图像进行高动态范围图像处理,以获取目标raw图像。
65.请参阅图2及图7,在一些实施例中,步骤06及步骤021均可以由一个或多个处理器20执行。也即是说,一个或多个处理器20还用于:对原始raw图像进行前处理;及对多帧处理后的原始raw图像进行高动态范围图像处理,以获取目标raw图像。
66.具体地,在一些实施例中,图像传感器10曝光获取到多帧原始raw图像后,处理器20对原始raw图像进行前处理,以获得处理后的原始raw图像。其中,前处理包括:线性校正、坏点校正处理、黑电平校正处理及镜头阴影校正处理中至少一种。例如,前处理仅包括线性校正;或者,前处理仅包括线性校正及坏点校正处理;或者,前处理仅包括线性校正、坏点校正处理及黑电平校正处理;或者,前处理包括线性校正、坏点校正处理、黑电平校正处理及镜头阴影校正处理,在此不作限制。
67.由于对原始raw图像进行前处理,将多帧处理后的原始raw图像进行高动态融合获得的目标raw图像,相较于直接将原始raw图像进行高动态融合获得的目标raw图像,清晰度更高并且具有更好的图像品质。
68.需要说明的是,在一些实施例,处理器20包括图像信号处理器(image signal processor,isp),对多帧原始raw进行图像前处理是在isp中进行的。当然,在一些实施例中,多帧原始raw进行图像前处理还能在其他处理器20中进行,即对多帧原始raw进行图像前处理不在isp中进行的,在此不作限制。
69.请参阅图1及图8,在一些实施例中,步骤02:多帧原始raw图像进行高动态范围图像处理,以获取目标raw图像,包括:
70.022:将多帧原始raw图像进行图像配准;
71.023:将曝光值相同的配准后的原始raw图像进行融合,以获得多帧中间raw图像;
72.024:获取每帧中间raw图像中所有像素对应的权重;及
73.025:根据权重融合多帧中间raw图像以获取目标raw图像。
74.请参阅图2及图8,在一些实施例中,步骤022、步骤023、步骤024及步骤025均可以由一个或多个处理器20执行。也即是说,一个或多个处理器20还用于:将多帧原始raw图像进行图像配准;将曝光值相同的配准后的原始raw图像进行融合,以获得多帧中间raw图像;获取每帧中间raw图像中所有像素对应的权重;及根据权重融合多帧中间raw图像以获取目标raw图像。
75.具体地,在获取多帧原始raw图像后,对多帧原始raw图像进行图像配准。当然,在一些事实例中,也可以对多帧处理后的原始raw图像进行配准。以下以对多帧原始raw图像进行图像配准为例进行说明。
76.请参阅图8及图9,在一些实施例中,将多帧原始raw图像进行配准,还包括:
77.0221:选取一帧第一原始raw图像作为第一参考图像;
78.0222:对待配准的原始raw图像及第一参考图像进行第一灰度处理,以获取待配准灰度图像及第一灰度图像;
79.0223:根据待配准灰度图像及第一灰度图像,获取与待配准的raw图像对应的第一阵列;
80.0224:根据待配准的原始raw图像上像素点的坐标及第一阵列获取配准后的原始raw图像。
81.请参阅图2及图9,在一些实施例中,步骤0221、步骤0222、步骤0223及步骤0224均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于:选取一帧第一原始raw图像作为第一参考图像;对待配准的原始raw图像及第一参考图像进行第一灰度处理,以获取待配准灰度图像及第一灰度图像;根据待配准灰度图像及第一灰度图像,获取与待配准的raw图像对应的第一阵列;及根据待配准的原始raw图像上像素点的坐标及第一阵列获取配准后的原始raw图像。
82.具体地,处理器20选取一帧第一原始raw图像作为第一参考图像,即在多帧原始raw图像中选取一帧以标定曝光值曝光的原始raw图像作为第一参考图像。在剩余的多帧原始raw图像中选取一帧原始raw图像作为待配准的原始raw图像。需要说明的是,由于以第一参考图像作为基准,无需对第一参考图像本身进行图像配准。可以理解为,第一参考图像本身就是已经配准好的原始raw图像,即配准后的原始raw图像包括对待配准的原始raw图像进行图像配准后获得的图像、及第一参考图像。
83.请参阅图10,对第一参考图像作第一灰度处理,以获得第一灰度图像。示例地,在一些实施例中,第一参考图像中包括多个像素网格,每个像素网格包括呈4x4排列的四个像素点。第一灰度图像中的一个像素点与第一参考图像中的一个像素网格对应,第一参考图像中一个像素网格中的所有像素点的均值作为第一灰度图像中对应的像素点的像素值。例如,如图10所示,第一参考图像中的一个像素网格u1包括:排列在第一参考图像第一行第一列的像素点p11、第一行第二列的像素点p12、第二行第一列的像素点p21及第二行第二列的像素点p22。并且排列在第一灰度图像第一行第一列p11的像素点与该像素网格u1对应。排列在第一灰度图像第一行第一列p11的像素点的像素值等于排列在第一参考图像第一行第一列的像素点p11的像素值、第一行第二列的像素点p12的像素值、第二行第一列的像素点p21的像素值及第二行第二列的像素点p22的像素值的均值。同样地,对待配准的原始raw图像进行待配准的灰度图像的具体方法,与对第一参考图像作第一灰度处理以获得第一灰度图像的具体方法相同,在此不做赘述。
84.获取第一灰度图像及待配准的灰度图像后,获取第一灰度图像及待配准图像中的特征点,在一些实施例中,处理器20可以根据harris角点算法来计算灰度图像中的特征点。当然,也可以采用其他方式计算灰度图像中的特征点,在此不做限制。
85.在获取到灰度图像(包括第一灰度图像及待配准的灰度图像)的特征点后,根据对应的特征点以获取与待配准的raw图像对应的第一阵列。示例地,在一些实施例中,根据第一灰度图像上特征点及待配准的灰度图像上对应的特征点,获取二者之间的映射关系,以获取第一阵列。第一阵列可以是单应性矩阵(homography矩阵),第一阵列是指待配准灰度
图像与第一参考灰度图像上的像素映射关系。需要说明的是,待配准原始raw图像与第一参考图像的映射关系与待配准灰度图像与第一参考灰度图像上的像素映射关系一样,也用这个相同的第一阵列。
86.在获取到第一阵列后,根据待配准的原始raw图像上的像素点的坐标及第一阵列获取配准后的原始raw图像。示例地,选取待配准原始raw图像中的一个像素点,获取选取的像素点的坐标,根据该像素点的坐标及第一阵列仿射变换计算该像素点配准后的配准坐标,并将该像素点移动至配准坐标,随后选取下一像素点重复上述过程,直至待配准的原始raw图像中的像素点均移动至配准坐标后,获得配准后的原始raw图像。
87.当然,在一些实施例中也可以采用其他方式将多帧原始raw图像进行图像配准,在此不再一一举例。由于对多帧原始raw图像进行图像配准,有利于对多帧原始raw图像的后续处理。
88.获得多帧配准后原始raw图像后,处理器20先将由曝光值相同的多帧配准后的原始raw图像进行融合,以获得多帧中间raw图像。例如,多帧配准后的原始raw图像包括多帧以标定曝光值曝光的配准后的第一原始raw图像、及多帧以第一曝光值曝光的配准后的第二raw图像。处理器20将多帧配准后的第一原始raw图像进行融合,以获得第一中间raw图像,将多帧配准后的第二原始raw图像进行融合,以获得第二中间raw图像。
89.具体地,请参阅图1及图11,在一些实施例中,对多帧原始raw图像进行高动态范围图像处理,以获取目标raw图像,还包括:
90.026:检测配准后的原始raw图像的运动区域;
91.步骤023:将曝光值相同的配准后的原始raw图像进行融合,以获得多帧中间raw图像,包括:
92.0231:针对曝光值相同的每一帧配准后的原始raw图像,对位于运动区域内的像素点采用第一融合处理,及对位于运动区域外的像素点采用第二融合处理,以获得多帧中间raw图像,第一融合处理与第二融合处理不同。
93.请参阅图2及图11,在一些实施例中,步骤026及步骤0231均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于检测配准后的原始raw图像的运动区域;及针对曝光值相同的每一帧配准后的原始raw图像,对位于运动区域内的像素点采用第一融合处理,及对位于运动区域外的像素点采用第二融合处理,以获得多帧中间raw图像,第一融合处理与第二融合处理不同。
94.在获取到第一灰度图像及待配准灰度图像后,根据待配准的灰度图像上的像素点的坐标及第一阵列获取配准后的灰度图像。也即是说,对多帧灰度图像(包括第一灰度图像及待配准灰度图像)也进行了图像配准。需要说明的是,根据待配准的灰度图像上的像素点的坐标及第一阵列获取配准后的灰度图像,与根据待配准的原始raw图像上的像素点的坐标及第一阵列获取配准后的原始raw图像相同,在此不做赘述。
95.随后,根据第一灰度图像及配准后灰度图像来确定与配准后灰度图像对应的原始raw的运动区域。具体地,请参阅图11及图12,在一些实施例中,检测配准后的原始raw图像的运动区域,包括:
96.0261:根据预设的映射关系获取第一灰度图像中各像素点的像素值的映射值及配准后灰度图像中各像素点的像素值的映射值;
97.0262:计算第一灰度图像中各像素点的映射值与配准后灰度图像中对应像素点的映射值之间的映射差值;
98.0263:若映射差值大于预设阈值,则确定配准后的原始raw图像中对应的像素点位于运动区域内。
99.请参阅图2及图12,在一些实施例中,步骤0261、步骤0262及步骤0263均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于根据预设的映射关系获取第一灰度图像中各像素点的像素值的映射值及配准后灰度图像中各像素点的像素值的映射值;计算第一灰度图像中各像素点的映射值与配准后灰度图像中对应像素点的映射值之间的映射差值;及若映射差值大于预设阈值,则确定配准后的原始raw图像中对应的像素点位于运动区域内。
100.在获取第一灰度图像及配准后灰度图像后,根据预设的映射关系获取第一灰度图像中各像素点的像素值的映射值及配准后灰度图像中各像素点的像素值的映射值。具体地,获取配准后灰度图像的像素点的像素值,并在预设的映射关系中获取该像素值对应的映射值。同样地,获取第一灰度图像中像素点的像素值,并在预设的映射关系中获取该像素值对应的映射值。需要说明的是,在一些实施例中,预设的映射关系可以是去噪声查找表。去噪声查找表上记录了获取的像素值及与该像素值对应的去除噪声影响后的像素值,如此获得的像素映射值在进行后续处理的过程中,能够降低噪声带来的影响,提高判断运动区域的准确性。
101.在获取到第一灰度图像所有像素点的像素值的映射值及配准后灰度图像中所有像素点的像素值的映射值后,计算第一灰度图像中各像素点的映射值与配准后灰度图像中对应像素点的映射值之间的映射差值。若映射差值大于预设阈值,则说明配准后灰度图像中该像素点所在区域为运动区域,即与该配准后灰度图像对应的配准后的原始raw图像中,与该像素点对应的像素网格区域内的像素点均位于运动区域。例如,图13中的右侧的配准后的灰度图像,左侧为该灰度图像对应的配准后的原始raw图像。其中,配准后的原始raw图中的一个像素网格u1包括:排列在第一参考图像第一行第一列的像素点p11、第一行第二列的像素点p12、第二行第一列的像素点p21及第二行第二列的像素点p22,并且配准后灰度图像中第一行第一列p11的像素点与配准后的原始raw的像素网格u1对应。假设配准后灰度图像中第一行第一列p11的像素点位于运动区域,则配准后的原始raw的像素网格u1内所有像素点均位于运动区域,即排列在第一参考图像第一行第一列的像素点p11、第一行第二列的像素点p12、第二行第一列的像素点p21及第二行第二列的像素点p22均位于运动区域。
102.需要说明的是,在一些实施例中,处理器20还对配准后的原始raw中确定的运动区域进行腐蚀、膨胀等图像形态处理,以使检测的运动区域更加精准。当然,在一些实施例中还能够采用其他方式检测配准后的原始raw图像中的运动区域。例如,直接计算配准后的原始raw图像中像素点的像素值与第一参考图中对应像素点的像素值的差值,若差值大于预设值则说明该像素点位于运动区域,在此并不做限制。
103.请参阅图8及图14,在一些实施例中,将曝光值相同的配准后的原始raw图像进行融合,以获得多帧中间raw图像,还包括:
104.0232:选取曝光值相同的多帧配准后的原始raw图像中的任意一帧作为第一基准图像,其他帧作为第一非基准图像。
105.请参阅图2及图14,在一些实施例中,步骤0232可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于选取曝光值相同的多帧配准后的原始raw图像中的任意一帧作为第一基准图像,其他帧作为第一非基准图像。
106.处理器20在曝光值相同的多帧配准后的原始raw图像中选取任意一帧作为第一基准图像,其他帧作为第一非基准图像。其中,在一些实施例中,将曝光值相同的多帧配准后的原始raw图像按照获取时间的先后进行排序,选取第一帧作为第一基准图像,即选取曝光值相同的多帧配准后的原始raw图像中最先获得的图像作为第一基准图像。由于用户按下快门那一时刻表示用户最想要获得的是此刻的图像,可以理解,获得图像的时间越靠近用户按下快门那一时刻,即越先获得的图像,越接近用户所期望获得的图像。因此以最先获得的配准后的原始raw图像图像作为融合的基准图像,能够使最终获得的图像更满足用户需求。当然,在一些实施例中,选取曝光值相同的多帧配准后的原始raw图像中清晰度最高的一帧配准后的原始raw图像作为第一基准图像,如此能够使最终获得的图像清晰度更高。
107.请参阅图8及图14,在一些实施例中,对位于运动区域的像素点采用第一融合处理,包括:
108.02311:若所有第一非基准图像相同位置的像素点均位于运动区域,则第一基准图像对应位置的像素点的像素值作为融合后的中间raw图像对应像素点的像素值;
109.对位于运动区域外的像素点采用第二融合处理,包括:
110.02312:若所有第一非基准图像相同位置的像素点中至少一个像素点位于运动区域外,则将第一基准图像对应位置的像素点的像素值与第一非基准图像对应位置且处于运动区域外的像素点的像素值的均值作为融合后的中间raw图像对应像素点的像素值。
111.请参阅图2及图14,在一些实施例中,步骤0311及步骤0312均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于:所有第一非基准图像相同位置的像素点均位于运动区域,则第一基准图像对应位置的像素点的像素值作为融合后的中间raw图像对应像素点的像素值;及若所有第一非基准图像相同位置的像素点中至少一个像素点位于运动区域外,则将第一基准图像对应位置的像素点的像素值与第一非基准图像对应位置且处于运动区域外的像素点的像素值的均值作为融合后的中间raw图像对应像素点的像素值。
112.在曝光值相同的多帧配准后的原始raw图像中确认第一基准图像及第一非基准图像后,若所有第一非基准图像相同位置的像素点均位于运动区域,则第一基准图像对应位置的像素的像素值作为融合后的中间raw图像对应像素点的像素值。例如,如图15所示,第一配准后的原始raw图像、第二配准后的原始raw图像及第三配准后的原始raw图像的曝光值均相同。其中,第一配准后的原始raw图像为第一基准图像、第二配准后的原始raw图像为第一非基准图像及第三配准后的原始raw图像也为第一非基准图像。假设位于第二配准后的原始raw图像第三行第三列的像素点a2位于运动区域,且位于第三配准后的原始raw图像第三行第三列的像素点a3也位于运动区域,即所有第一非基准图像中第三行第三列的像素点均位于运动区域,则将位于第一基准图像(第一配准后的原始raw图像)第三行第三列的像素点a1的像素值作为融合后中间raw图像的像素点a的像素值,并将像素点a设置于融合后中间raw图像的第三行第三列。
113.在曝光值相同的多帧配准后的原始raw图像中确认第一基准图像及第一非基准图
像后,若所有第一非基准图像相同位置的像素点中至少一个像素点位于运动区域外,则将第一基准图像对应位置的像素点的像素值与第一非基准图像对应位置且处于运动区域外的像素点的像素值的均值作为融合后的中间raw图像对应像素点的像素值。例如,如图15所示,第一配准后的原始raw图像、第二配准后的原始图像raw及第三配准后的原始raw图像的曝光值均相同。其中,第一配准后的原始raw图像为第一基准图像、第二配准后的原始raw图像为第一非基准图像及第三配准后的原始raw图像也为第一非基准图像。假设位于第二配准后的原始raw图像第一行第一列的像素点b2位于运动区域外,且位于第三配准后的原始raw图像第一行第一列的像素点b3也位于运动区域外,即所有第一非基准图像中第一行第一列的像素点均位于运动区域外,则将位于第一基准图像(第一配准后的原始raw图像)第一行第一列的像素点b1的像素值、位于第二配准后的原始raw图像第一行第一列的像素点b2的像素值、及位于第三配准后的原始raw图像第一行第一列的像素点b3的像素值的均值作为融合后中间raw图像的像素点b的像素值,并将像素点b设置于融合后中间raw图像的第一行第一列。再例如,位于第二配准后的原始raw图像第一行第二列的像素点c2位于运动区域外,且位于第三配准后的原始raw图像第一行第二列的像素点c3位于运动区域,即第一所有第一非基准图像相同位置的像素点中至少一个像素点位于运动区域外,则将位于第一基准图像(第一配准后的原始raw图像)第一行第二列的像素点c1的像素值、及位于第二配准后的原始raw图像第一行第二列的像素点c2的像素值均值作为融合后中间raw图像的像素点c的像素值,并将像素点c设置于融合后中间raw图像的第一行第二列。
114.请参阅图1及图16,在一些实施例中,对多帧原始raw图像进行高动态范围图像处理,以获取目标raw图像,还包括:
115.028:对多帧中间raw图像进行去鬼影处理,以获得去鬼影后的中间raw图像;
116.0241:获取每帧去鬼影后的中间raw图像中所有像素对应的权重;
117.0251:根据权重融合多帧去鬼影后的中间raw图像以获取目标raw图像。
118.请参阅图2及图16,在一些实施例中,步骤028、步骤0241及步骤0251均可以在一个或多个处理器20实现。也即是说,一个或多个处理器20还用于对多帧中间raw图像进行去鬼影处理,以获得去鬼影后的中间raw图像;获取每帧去鬼影后的中间raw图像中所有像素对应的权重;及根据权重融合多帧去鬼影后的中间raw图像。
119.在获得多帧不同曝光值的中间raw图像后,处理器20从多帧中间raw图像中,选取由第一原始raw图像融合后获得的中间raw图像作为第二基准图像,即第二基准图像的曝光值为标定曝光值。
120.在一些实施例中,选取一帧中间raw图像,并检测该中间raw图像的运动区域,针对曝光值相同的每一帧中间raw图像,对于位于运动区域内的像素点,根据在第二基准图像上与改像素点对应的像素点的像素值、第二基准图像的亮度及该中间raw图像的亮度,计算去鬼影后中间raw图像与该像素点对应的像素点的像素值。例如,如图17所示,第一中间raw图像及第二中间raw曝光值均不相同。其中,第一中间raw图像为第二基准图像。假设位于第二中间raw图像第三行第三列的像素点d2位于运动区域内,则将位于第二基准图像第三行第三列的像素点d1的像素点,与第二中间raw图像的平均亮度与第二基准图像的平均亮度的比值的乘积,作为去鬼影后第二中间raw图像像素点d’的像素值,并将该像素点d’设置在去鬼影后第二中间raw图像像素第三行第三列。对于位于运动区域外的像素点,则直接将该中
间raw图的像素点的像素值,作为去鬼影后中间raw对应位置的像素点的像素值。例如,如图17所示,位于第二中间raw图像第一行第一列的像素点e2位于运动区域内,则将位于第二中间raw图像第一行第一列的像素点e2的像素值作为去鬼影后第二中间raw图像像素点e’的像素值,并将该像素点e’设置在去鬼影后第二中间raw图像像素第一行第一列。
121.由于对中间raw图像进行去鬼影处理后再进行融合,相较于直接对多帧中间raw图像进行融合,能够使最后获得的目标raw图像具有更高的清晰度及更好的图像品质。
122.在获得去鬼影后的中间raw图像后,获取每帧去鬼影后的中raw图像,并根据权重融合多帧去鬼影后的中间raw图像以获取目标raw图像。其中,获取每帧去鬼影后的中raw图像,并根据权重融合多帧去鬼影后的中间raw图像以获取目标raw图像的具体实方式,与获取每帧中间raw图像中所有像素对应的权重的,并根据权重融合多帧中间raw图像以获取目标raw图像的具体实方式相同。以下以获取每帧中间raw图像中所有像素对应的权重,并根据权重融合多帧中间raw图像以获取目标raw图像为例进行说明。
123.请参阅图8及图18,在一些实施例中,获取每帧中间raw图像中所有像素对应的权重,包括:
124.0242:选取第一原始raw图像融合后获得中间raw图像作为第二基准图像,其余中间raw图像作为第二非基准图像;
125.0243:对第二基准图像进行第二灰度处理,以获取第二灰度图像;
126.0244:根据第二灰度图像的平均亮度和方差、及中间raw图像中待计算像素点的像素值,获取待计算的像素点对应的权重。
127.请参阅图2及图18,在一些实施例中,步骤0242、步骤0243及步骤0244均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20用于选取第一原始raw图像融合后获得中间raw图像作为第二基准图像,其余中间raw图像作为第二非基准图像;对第二基准图像进行第二灰度处理,以获取第二灰度图像;及根据第二灰度图像的平均亮度和方差、及中间raw图像中待计算像素点的像素值,获取待计算的像素点对应的权重。
128.处理器20从多帧中间raw图像中,选取由第一原始raw图像融合后获得的中间raw图像作为第二基准图像,即第二基准图像的曝光值为标定曝光值,将其余中间raw作为第二非基准图像。如图19所示,处理器20对第二基准图像进行第二灰度处理,以获取第二灰度图像。示例地,处理器20对第二基准图像进行插值处理以获得第二灰度图像,并且第二灰度图像的长度及宽度与第二基准图像的长度及宽度相同。
129.在获得第二灰度图像后,获取第二灰度图像的平均亮度和方差。选取多帧中间raw图像(包括第二基准图像及第二非基准图像)中的任意一帧,计算选取的中间raw图像中所有像素点对应的权重。示例地,在一些实施例中,可以根据第二灰度图像的平均亮度和方差、及中间raw图像中待计算像素点的像素值,获取待计算的像素点对应的权重。具体地,每一帧中间raw图像中待计算像素点对应的权重可以根据计算公式计算获得,其中weight为待计算像素点对应的权重、mean为第二灰度图像的平均亮度及sigma为第二灰度图像的亮度方差。在一些实施例中,可以根据用户实际需求对像素点对应的权重进行调整,示例地,可以根据计算公式计算获得,其中m和n为用户调节的增
益值。在获得选取的中间raw图像中所有像素点对应的权重,随后获取下一帧中间raw中间图像中所有像素点对应的权重,直至获取到所有中间raw图像中所有像素点对应的权重。
130.请参阅图8及图20,在一些实施例中,获取每帧中间raw图像中所有像素对应的权重,包括:
131.0245:对所有中间raw图像进行第二灰度处理,以获取对应的第三灰度图像;
132.0246:根据第三灰度图像的平均亮度和方差、及对应的中间raw图像中待计算像素点的像素值,获取待计算的像素点对应的权重。
133.请参阅图2及图20,在一些实施例中,步骤0245及步骤0246均是可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于:对所有中间raw图像进行第二灰度处理,以获取对应的第三灰度图像;及根据第三灰度图像的平均亮度和方差、及对应的中间raw图像中待计算像素点的像素值,获取待计算的像素点对应的权重。
134.处理器20对所有中间raw图像进行第二灰度处理以获得对应的第三灰度图像,其中对所有中间raw图像进行第二灰度处理的具体实施方式,与对第二基准图像进行第二灰度处理的具体实施方式相同,在此不做赘述。
135.在获得多帧第三灰度图像后,选取其中一帧第三灰度图像,并获取该第三灰度图像的平均亮度和方差。根据该第三灰度图像的平均亮度和方差,及与该第三灰度图像对应的中间raw中间图像中待计算像素点的像素值,计算该像素点对应的权重。示例地,每一帧中间raw图像中待计算像素点对应的权重可以根据计算公式计算获得,其中weight为待计算像素点对应的权重、mean为与待计算像素点所在的中间raw图像对应的第三灰度图像的平均亮度,及sigma为与待计算像素点所在的中间raw图像对应的第三灰度图像的亮度方差。在获得该中间raw图像中所有像素点对应的权重,随后获取下一帧中间raw中间图像中所有像素点对应的权重,直至获取到所有中间raw图像中所有像素点对应的权重。
136.在获得所有中间raw图像中所有像素点对应的权重后,根据权重融合多帧中间raw图像以获取目标raw图像。具体地,请参阅图1及图21,在一些实施例中,根据权重融合多帧中间raw图像以获取目标raw图像,包括:
137.02512:将所有中间raw图像对应位置的像素点的像素值与对应权重乘积之和作为融合后的目标raw图像对应像素点的像素值。
138.请参阅图2及图21,在一些实施例中,步骤0251可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于将所有中间raw图像对应位置的像素点的像素值与对应权重乘积之和作为融合后的目标raw图像对应像素点的像素值。
139.在获得所有中间raw图像中所有像素点对应的权重后,处理器20将所有中间raw对应位置的像素点的像素值与对应权重乘积之和,作为融合后的目标raw图像对应像素点的像素值。例如,假设位于第一中间raw图像第一行第一列的像素点的对应权重为第一权重、位于第二中间raw图像第一行第一列的像素点的对应权重为第二权重,则位于第一中间raw图像第一行第一列的像素点的像素值乘第一权重,与位于第二中间raw图像第一行第一列的像素点的像素值乘第二权重的和作为融合后的目标raw图像位于第一行第一列的像素点的像素值。需要说明的是,在一些实施例中,还可以对所有中间raw对应位置的像素点对应
权重作归一化处理后,即多帧所有中间raw对应位置的像素点对应权重相加等于1,所有中间raw对应位置的像素点的像素值与对应的归一后的权重乘积之和,作为融合后的目标raw图像对应像素点的像素值。
140.需要说明的是,在一些实施例中,多帧原始raw图像经过高动态融合处理获得目标raw图像后,目标raw图像具有更高的动态范围,并且目标raw图像的位宽高于原始raw图像的位宽。例如,多帧位宽为12bit的原始raw图像经过高动态融合,获得位宽为16bit的目标raw图像。当然,在一些实施例中,目标raw图像的位宽也可以等于原始raw图像的位宽。例如,多帧位宽为12bit的原始raw图像经过高动态融合,获得位宽为12bit的目标raw图像。此外,在一些实施例中,获取的多帧原始raw图像均是以相同曝光值曝光的,处理器20对多帧相同曝光值曝光的原始raw图像进行融合,直接获得目标raw图像,在此不做限制。
141.处理器20根据拍摄多帧原始raw图像时的元参数信息,参数信息包括但不限制于:拍摄参数、图像高度、黑电平、白电平、色彩转换矩阵、白平衡参数、镜头阴影校正参数中的至少一种。
142.需要说明的是,dng格式是一种开放的raw文件格式,主要为了统一不同厂商的raw格式。dng规范中定义了数据的组织方式、颜色空间转换等,使用的标签参数(tag)是基于tiff/ep规范的拓展。dng图像必需的部分tag不是直接从拍摄的元数据信息中取的,而是通过元数据转换计算得到。例如,标签参数中的颜色矩阵(colormatrix)和前部矩阵(forwardmatrix)需要通过元数据参数信息进行计算获得,下面做进一步说明。
143.在一些实施例中,元数据参数信息包括原始raw图像的拍摄参数、第一光源下的第一色彩转换矩阵、及第二光源下的第二色彩转换矩阵,标签参数包括第一颜色矩阵、及第二颜色矩阵。请参阅1及图22,根据拍摄多帧原始raw图像时的元数据参数信息获取dng图像中的标签参数,包括:
144.031:根据第一色彩转换矩阵、第一矩阵及第二矩阵获取第一颜色矩阵;及
145.032:根据第二色彩转换矩阵及第一矩阵获取第二颜色矩阵。
146.请参阅图2及图22,在一些实施例中,步骤031及步骤032均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于根据第一色彩转换矩阵、第一矩阵及第二矩阵获取第一颜色矩阵;及根据第二色彩转换矩阵及第一矩阵获取第二颜色矩阵。
147.具体地,第一颜色矩阵可以根据计算公式colormatrix1=inv(ccm1*srgb2xyz
d65
*d
65
toa)计算获得,其中colormatrix1表示第一颜色矩阵,ccm1表示在第一光源下的第一色彩转换矩阵,srgb2xyz
d65
表示第一矩阵,d
65
toa表示第二矩阵。也即是说,第一颜色矩阵可以通过第一色彩转换矩阵、第一矩阵及第二矩阵乘积的逆矩阵计算获得。第二颜色矩阵可以根据计算公式colormatrix2=inv(ccm2*srgb2xyz
d65
)计算获得,其中colormatrix2表示第二颜色矩阵,ccm2表示在第二光源下的第二色彩转换矩阵,srgb2xyz
d65
表示第一矩阵。也即是说,第二颜色矩阵可以通过第二色彩转换矩阵及第一矩阵乘积的逆矩阵计算获得。需要说明的是,第一矩阵为以第二光源为参考光源,从第一空间到第二空间的转换矩阵第一空间与第二空间不同;第二矩阵为从第二光源的参考白到第一光源的参考白的转换矩阵。在一些实施例中,第一光源可以为低色温光源(例如a光),第二光源可以为高色温光源(例如d65光),第一空间可以为srgb空间,第二空间可以为xyz空间。
148.请参阅图1及图23,在一些实施例中,标签参数还包括第一前部矩阵及第二前部矩
阵,根据多帧raw图像拍摄时的元数据的参数信息,以获取dng图像中的标签参数,还包括:
149.033:根据第一色彩转换矩阵、及第三矩阵,计算获得第一前部矩阵;
150.034:根据第二色彩转换矩阵、及第三矩阵,计算获得第二前部矩阵。
151.请参阅图2及图23,在一些实施例中,步骤033及步骤034均可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于根据第一色彩转换矩阵、及第三矩阵,计算获得第一前部矩阵;及根据第二色彩转换矩阵、及第三矩阵,计算获得第二前部矩阵。
152.具体地,第一前部矩阵可以根据计算公式forwardmatrix1=ccm1*srgb2xyz
d50
计算获得,forwardmatrix1表示第一前部矩阵,ccm1表示在第一光源下的第一色彩转换矩阵,srgb2xyz
d50
表示第三矩阵。也即是说,第一前部矩阵等于通过第一色彩转换矩阵与第三矩阵的乘积。第二前部矩阵可以根据计算公式forwardmatrix2=ccm2*srgb2xyz
d50
计算获得,forwardmatrix2表示第二前部矩阵,ccm2表示在第二光源下的第二色彩转换矩阵,srgb2xyz
d50
表示第三矩阵。也即是说,第二前部矩阵等于通过第二色彩转换矩阵与第三矩阵的乘积。需要说明的是,第三矩阵为以第三光源为参考光源,从第一空间到第二空间的转换矩阵。在一些实施例中,第一光源可以为低色温光源(例如a光),第二光源可以为高色温光源(例如d65光),第三光源可以为d50光,第一空间可以为srgb空间,第二空间可以为xyz空间。
153.请参阅图24,在一些实施例中,根据目标raw图像、标签参数及元数据参数信息生成dng文件,包括:
154.041:将标签参数、元数据参数信息、目标raw图像的数据按照dng编码规范写入空白文件以生成dng文件。
155.请参阅图2及图24,在一些实施例中,步骤041可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于将标签参数、元数据参数信息、目标raw图像的数据按照dng编码规范写入空白文件以生成dng文件。
156.需要说明的是,由于在合成多帧原始raw图像时,均是以标定曝光值曝光的原始raw图像为基准图像进行融合的,因此创建dng文件时元数据参数信息中的拍摄参数,是以标定曝光值曝光的原始raw图像的拍摄参数。
157.请参阅图25,在一些实施例中,图像处理方法还包括:
158.07:解析dng文件以生成dng图像。
159.请参阅图2及图25,在一些实施例中,步骤07可以由一个或多个处理器20实现。也即是说,一个或多个处理器20还用于解析dng文件以生成dng图像。
160.获得dng文件后,处理器20可以根据dng文件中的标签参数、元数据参数信息及目标raw图像的数据进行解析,以获得dng格式的图像。在一些实施例中,处理器20将获取到的dng文件输出到应用程序(例如相册),应用程序打开dng文件并对dng文件进行解析,以生成dng图像,并且显示dng图像。
161.请参阅图26,在一些实施例中,生成dng图像后,可以将dng图像导入后期处理软件中,对dng图像进行后期调整以获得目标图像。后期调整包括但不限于亮度调整、色度调整及尺寸调整中的至少一种。
162.由于本技术中将多帧原始raw图像进行高动态融合获得的目标raw图像,相较于单帧原始raw图像具有更高的动态范围及更高的清晰度。并且将目标raw图像转换为dng文件,
方便用户导出在后期软件中进行处理。
163.请参阅图27,本技术还提供一种电子设备1000。本技术实施方式的电子设备1000包括镜头300、壳体200及上述任意一项实施方式的图像处理装置100。镜头300、图像处理装置100与壳体200结合。镜头300与图像处理装置100的图像传感器10配合成像。
164.电子设备1000可以是手机、平板电脑、笔记本电脑、智能穿戴设备(例如智能手表、智能手环、智能眼镜、智能头盔)、无人机、头显设备等,在此不作限制。
165.本技术中的电子设备1000,通过图像处理装置100对多帧raw图像进行高动态融合获得目标raw图像后,再将目标raw图转换为dng文件。如此,一方面有多帧raw图像合成的目标raw图像相较于单帧raw图像,图像信息量更大、动态范围更广并且清晰度更高;另一方面,由于将目标raw图转换为具有统一编码及解析格式的dng文件,有利于用户将该dng文件导出至后期软件中进行处理。
166.请参阅28,本技术还提供一种包含计算机程序的非易失性计算机可读存储介质400。该计算机程序被处理器60执行时,使得处理器60执行上述任意一个实施方式的图像处理方法。
167.例如,请参阅1及图28,计算机程序被处理器60执行时,使得处理器60执行以下步骤:
168.01:获取多帧原始raw图像;
169.02:对多帧原始raw图像进行高动态范围图像处理,以获取目标raw图像;
170.03:根据拍摄多帧原始raw图像时的元数据参数信息获取dng图像中的标签参数;及
171.04:根据目标raw图像、标签参数及元数据参数信息生成dng文件。
172.需要说明的是,处理器60可以与设置在图像处理装置100内的处理器20为同一个处理器,处理器60也可以设置在电子设备1000内,即处理器60也可以与设置在图像处理装置100内的处理器20不为同一个处理器,在此不作限制。
173.在本说明书的描述中,参考术语“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”或“一些示例”等的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本技术的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
174.流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更多个用于实现特定逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本技术的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本技术的实施例所属技术领域的技术人员所理解。
175.尽管上面已经示出和描述了本技术的实施方式,可以理解的是,上述实施方式是示例性的,不能理解为对本技术的限制,本领域的普通技术人员在本技术的范围内可以对上述实施方式进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1