智能相机的制作方法
本发明属于图像采集技术领域,具体涉及智能相机。
背景技术:
目前对于加工好的pcb板通常都釆用专门的智能相机,即pcb板显微镜进行缺陷检测,实际工作时通过调节焦距使得显微成像镜头能够将下方的pcb板清洗的成像在显示器上,再由计算机或人工对pcb板上的缺陷部位进行甄别,但是对于较大尺寸的pcb板,需要人工多次移动pcb板,而且对于pcb板进行缺陷检查时,需要看芯片外观,也需要看引脚焊点或者布线情况,需要手动反复调整焦距。
传统的智能相机在使用时,然而在其使用时还存在以下问题:
对于大尺寸pcb板,由于尺寸大,需要检测的内容多,由于智能相机的成像范围有限,检测过程中需要人工多次移动pcb板,而且对于pcb板进行缺陷检查时,不仅需要看芯片外观,也需要看引脚焊点或者布线情况,二者放大倍数不同,需要手动反复调整焦距,导致了整体的使用操作十分的不便。
技术实现要素:
针对现有技术存在的不足,本发明目的是提供智能相机,解决了使用操作十分的不便以及影响设备整体的使用寿命的问题。
智能相机,包括运动平台,智能相机以及z轴支架,所述智能相机通过z轴运动机构固定在所述z轴支架,所述运动平台和所述z轴支架均固定在底座上,所述运动平台和所述z轴支架彼此独立,所述智能相机位于所述运动平台上方;所述运动平台在水平面内沿x方向和y方向移动,所述z轴运动机构带动所述智能相机沿所述z轴支架做z方向移动。
所述运动平台包括两层结构,分别为x方向移动模块和y方向移动模块,x方向移动模块由x轴电机和x轴驱动机构组成,y方向移动模块由y轴电机和y轴驱动模块组成。
所述z轴驱动机构包括智能相机固定座,所述智能相机固定座背面固定齿条,所述齿条与驱动齿轮啮合,所述驱动齿轮由z轴电机驱动,所述驱动电机固定在电机支架上,所述电机支架与z轴支架固定连接。
所述智能相机包括成像组件,镜头以及led光源,所述led光源位于镜头下方,所述镜头位于成像组件下方。
还包括z轴电机管理系统,所述电机管理系统实时监控z轴电机的温度。
所述z轴电机管理系统包括信号检测电路、信号处理电路和控制输出电路,所述信号检测电路将电流传感器u1检测到的信号经过跟随器后传输至信号处理电路,信号经过信号处理电路中的比较器后传输至控制输出电路,控制输出电路则利用信号经过判断器后将散热电路导通。
所述信号处理电路包括比较器,用来将信号处理电路传输过来的信号进行比较。
所述比较器包括电阻r5,电阻r5的一端分别连接信号检测电路中的电容c1的另一端,电阻r5的另一端分别连接运放器u2a的同相端、运放器u3a的反相端、运放器u6a的同相端,运放器u6a的反相端分别连接电阻r8的一端、电阻r12的一端,电阻r8的另一端与信号检测电路中的电阻r1的另一端相连接并连接正极性电源vcc,运放器u3a的同相端与可调电阻r4的可调端相连接,运放器u2a的反相端分别连接电阻r12的另一端、电阻r6的一端,可调电阻r4的上端与电阻r6的另一端相连接,可调电阻r4的下端连接电容c2的一端并连接地,运放器u3a的输出端连接二极管d3的正极相连接,二极管d3的负极分别连接二极管d4的负极、电阻r7的一端,电阻r7的另一端与电容c2的另一端相连接,运放器u2a的输出端分别连接三极管q2的基极、二极管d4的正极、电阻r14的一端,三极管q2的发射极与电阻r14的另一端相连接并连接正极性电源vcc,三极管q2的集电极分别连接二极管d2的正极、电阻r15的一端,电阻r15的另一端与电阻r13的一端相连接并连接地,二极管d2的负极分别连接二极管d6的负极、电阻r13的另一端,二极管d6的正极与运放器u6a的输出端相连接。
与现有技术相比,本发明的有益效果是:
1、本申请中的智能相机,运动平台可以带着pcb板做二维平面运动,智能相机可在z轴方向移动,从而使得该智能相机可以适应不同尺寸,不同类型的pcb板的缺陷检测工作,尤其对于大尺寸的pcb板不必人为多次移动,频繁中断检测程序,提高了检测效率。
2、由于z轴结构的特殊性,使得z轴电机容易发热,设置z轴电机管理系统,可以实时监控z轴电机工作状态,避免过热甚至损坏。
3、本发明针对z轴电机设置了z轴电机管理系统,利用电流传感器u1检测z轴电机的工作电流,并利用信号处理电路中运放器u2a、运放器u3a、运放器u6a组成的比较器将信号与2倍的z轴电机u5额定电流转化的电压信号、8倍的z轴电机u5的额定电流转化的电压信号、z轴电机u5的额定电流转化的电压信号进行比较,进而判断出来z轴电机u5是否出现了堵转电流,在控制输出电路中与热敏电阻r10检测到的温度信号,利用与门u4a判断z轴电机u5出现了堵转现象,并断开z轴电机u5的供电电源及直流电源v1,散热电路开启,提高了本发明针对z轴电机设置的z轴电机管理系统的准确性。
附图说明
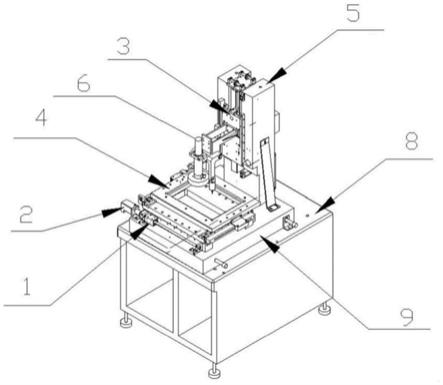
图1为本发明的立体结构示意图;
图2为本发明的z轴运动机构的剖视图;
图3为本发明的智能相机结构示意图;
图4为本发明的z轴电机管理系统电路原理图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-3所示,智能相机,包括运动平台4,智能相机6以及z轴支架5,所述智能相机6通过z轴运动机构3固定在所述z轴支架5,所述运动平台4和所述z轴支架5均固定在底座9上,所述运动平台4和所述z轴支架5彼此独立,所述智能相机6位于所述运动平台4上方;所述运动平台4在水平面内沿x方向和y方向移动,所述z轴运动机构带动所述智能相机6沿所述z轴支架5做z方向移动。
所述运动平台4包括两层结构,分别为x方向移动模块和y方向移动模块,x方向移动模块由x轴电机2和x轴驱动机构1组成,y方向移动模块由y轴电机和y轴驱动模块组成。
所述z轴驱动机构3包括智能相机固定座3-1,所述智能相机固定座3-1背面固定齿条3-2,所述齿条3-2与驱动齿轮3-3啮合,所述驱动齿轮3-3由z轴电机驱动,所述驱动电机固定在电机支架3-4上,所述电机支架3-4与z轴支架5固定连接。
所述智能相机包括成像组件6-1,镜头6-2以及led光源6-3,所述led光源6-3位于镜头6-2下方,所述镜头6-2位于成像组件6-1下方。
所述底座9固定在工作台8上,使得整个智能相机均固定在工作台8上,方便操作的同时,保护本申请中的智能相机工作的稳定性。
所述x轴电机2,y轴电机以及z轴电机均有电机驱动系统控制,可以使得本申请中的智能相机6可以实现三维方向的调节,进而满足大尺寸pcb板的观测需求。
工作原理:工作时,将待检测的pcb板放置在运动平台4上,由于运动平台4可以沿x方向和y方向移动,因此对于大尺寸的pcb板,智能相机6就可以观测到pcb板上的任何位置,而不用手动去移动pcb板;z轴电机驱动驱动齿轮3-3转动,进而使得齿条3-2上下移动,从而调整智能相机6在z轴方向上的尺寸,便于不同焦距时的快速对焦。
同时,由于pcb板上分布着不同的元器件,既有芯片,又有各种模拟元器件,而对于一张pcb板进行缺陷检查时,既需要看芯片外观封装有无磨损,也需要看引脚焊点或者布线情况,因此需要智能相机在多个焦距内不停切换,同时在对较大的pcb板进行缺陷检查时,按照区域一点点进行检查,这时更需要频繁的切换焦距。
而智能相机并不同于一般的影像测量仪或者三维测量设备,智能相机的三轴运动调节因为成本等考虑相对较为简单,尤其是z轴的运动调节,一般为齿轮齿条形式或者丝杠螺母形式,而在进行pcb板缺陷检查时,需要将z轴固定在一个位置保持不动一段时间,此时将z轴保持不动是由z轴电机来实现的,而该状态下电机会产生堵转电流,时间较长会导致电机过热损坏。
因此,本申请中还包括z轴电机管理系统,所述电机管理系统实时监控z轴电机的温度。
z轴电机管理系统包括信号检测电路、信号处理电路和控制输出电路,所述信号检测电路将电流传感器u1检测到的信号经过跟随器后传输至信号处理电路,信号经过信号处理电路中的比较器后传输至控制输出电路,控制输出电路则利用信号经过判断器后将散热电路导通;
所述信号检测电路包括跟随器,利用电流传感器u1来检测z轴电机u5在工作时的工作电流,电流传感器u1采用型号例如为ahkc-eka的霍尔电流传感器作为电流传感器u1,也可以采用任何现有技术中的电流传感器,只要满足相关的输入输出需求即可,并将检测到的电流转化为电压,利用瞬态抑制二极管d1来抑制浪涌,避免信号突然传输至z轴电机管理系统时引起浪涌现象,引起z轴电机管理系统的电路器件损坏,由于电流传感器u1将采集到的信号输出为电压,利用场效应管q1来实现阻抗匹配,实现将信号无损耗的接收,信号经过跟随器之后传输至电阻r3和电容c1组成的滤波器内,滤除直流电源v1在为z轴电机u5供电时混杂的杂波,避免杂波影响到信号的准确性,将信号传输至信号处理电路;
所述跟随器瞬态抑制二极管d1,瞬态抑制二极管d1的一端连接电流传感器u1的out引脚、电阻r1的一端、场效应管q1的栅极,场效应管q1的漏极分别连接电阻r1的另一端、电流传感器u1的vcc引脚并连接正极性电源vcc,场效应管q1的源极分别连接电阻r2的一端、电阻r3的一端,电阻r2的另一端分别连接瞬态抑制二极管d1的另一端、电容c1的一端,电流传感器u1的gnd引脚并接地,电阻r3的另一端与电容c1的另一端相连接;
所述信号处理电路包括比较器,利用电阻r5将信号检测电路传输过来的信号进行接收,并将信号传输至比较器上,运放器u2a、运放器u3a、电阻r6、可调电阻r7、电阻r8组成比较器,运放器u2a的反相端连接的是2倍的z轴电机u5额定电流转化的电压信号,运放器u3a的同相端接收的是8倍的z轴电机u5的额定电流转化的电压信号,运放器u6a的反相端连接的是z轴电机u5的额定电流转化的电压信号,由电阻r8、电阻12、电阻r6和可调电阻r4组成的分压电路,分别为运放器u2a、运放器u3a、运放器u6a提供2倍的z轴电机u5额定电流转化的电压信号、8倍的z轴电机u5的额定电流信号转化的信号、z轴电机u5的额定电流转化的信号,当运放器u2a或运放器u3a输出高电平时则表明电流传感器u1检测到的是z轴电机u5的启动电流,而非是工作电流,则电阻r7和电容c7组成阻容吸收电路将启动电流泄放至大地,而当运放器u2a输出低电平,且运放器u6a组成的比较器输出高电平,则表明此时电流传感器u1检测到的是z轴电机u5的堵转电流,表明此时z轴电机u5出现了堵转电流,运放器u2a输出的低电平将三极管q2导通,三极管q2将二极管d2、二极管d6、电阻r13组成的或门导通,从而将控制输出电路触发而启动;
所述比较器包括电阻r5,电阻r5的一端分别连接信号检测电路中的电容c1的另一端,电阻r5的另一端分别连接运放器u2a的同相端、运放器u3a的反相端、运放器u6a的同相端,运放器u6a的反相端分别连接电阻r8的一端、电阻r12的一端,电阻r8的另一端与信号检测电路中的电阻r1的另一端相连接并连接正极性电源vcc,运放器u3a的同相端与可调电阻r4的可调端相连接,运放器u2a的反相端分别连接电阻r12的另一端、电阻r6的一端,可调电阻r4的上端与电阻r6的另一端相连接,可调电阻r4的下端连接电容c2的一端并连接地,运放器u3a的输出端连接二极管d3的正极相连接,二极管d3的负极分别连接二极管d4的负极、电阻r7的一端,电阻r7的另一端与电容c2的另一端相连接,运放器u2a的输出端分别连接三极管q2的基极、二极管d4的正极、电阻r14的一端,三极管q2的发射极与电阻r14的另一端相连接并连接正极性电源vcc,三极管q2的集电极分别连接二极管d2的正极、电阻r15的一端,电阻r15的另一端与电阻r13的一端相连接并连接地,二极管d2的负极分别连接二极管d6的负极、电阻r13的另一端,二极管d6的正极与运放器u6a的输出端相连接;
所述控制输出电路包括判断器,信号处理电路中的三极管q2导通后将继电器k1导通,继电器k1的开关s1闭合,信号通过闭合的开关s1、电阻r9传输至与门u4a的5引脚上,同时与门u4a的7引脚上接收的是利用电阻r11和热敏电阻r10检测的z轴电机u5的温度,热敏电阻r10采用的是ptcr型的热敏电阻,开关s1是继电器k1的引脚开关,当z轴电机u5的温度信号升高时,热敏电阻r10的的阻值升高,则与门u4a的7引脚得到的温度值升高,即此时电机确实出现了堵转现象,此时与门u4a的输出端输出高电平从而使继电器k2的线圈得电而使继电器k2导通,开关s2为继电器k2的引脚开关,开关s2的1引脚与2引脚断开连接,从而直流电源v1无法为z轴电机u5继续供电,同时开关s2的1引脚与3引脚相连接,散热电路启动,为z轴电机u5进行散热工作;
所述判断器包括二极管d5,二极管d5的负极分别连接继电器k1的一端、信号处理电路中的电阻r13的另一端,继电器k1的另一端分别连接二极管d5的正极、信号处理电路中的电阻r13的一端并接地,开关s1的一端分别连接信号检测电路中的电容c1的另一端、信号处理电路中的电阻r5的一端,开关s1的另一端与电阻r9的一端相连接,电阻r9的另一端与门u4a的5引脚,与门u4a的7引脚分别连接电阻r11的一端、热敏电阻r10的一端,热敏电阻r10的另一端与继电器k2的一端连接并接地接地,电阻r11的另一端分别连接信号比较电路中的电阻r8的另一端、信号检测电路中的电阻r1的另一端并连接正极性电源vcc,与门u4a的8引脚与继电器k2的另一端相连接,开关s2的1引脚的一端与z轴电机u5的2引脚相连接,开关s2的1引脚与开关s2的2引脚的一端相连接,开关s2的2引脚的另一端连接直流电源v1的负极,直流电源v1的正极与z轴电机u5的1引脚相连接,开关s2的3引脚连接散热电路。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 还没有人留言评论。精彩留言会获得点赞!