智能监控废弃物清理的系统与方法与流程
1.本发明涉及废弃物清理的监控技术,特别是有效监控废弃物清理过程,确保废弃物的正确清理,减少弊端发生的优良技术。
背景技术:
2.随着文明的进度,各国对于废弃物的清理问题,都逐渐加强重视,尤其是在生活质量提升的条件下,废弃物的生成更是与日俱增,不仅破坏观瞻、发出恶臭,更会污染环境、破坏生态,进一步危害人体健康,甚至危及人类生存。
3.目前,各国清理废弃物的方式,多是委托给专业的废弃物清理业者,由业者进行废弃物的回收、运输,直到最终的处理或再利用,并有专责机关进行监管之责,以确保废弃物清理符合法规要求。
4.然而,因为废弃物的清理规模相当庞大,流程极为冗长,故参与人数众多,时间持久,当清理过程中任一阶段发生问题,不仅影响整个废弃物清理成果,而且不容易找到问题所在,难以惩处失职人员。
5.其中,最大的问题在于,整个废弃物的清理流程没有完善的监控制度,即使有心解决问题,也不易察觉问题所在,即使要求工作人员随时进行记录,但人力监控的有效性原本就不高,而且要进行数据的变造也并非困难之事,长期下来,废弃物的有效清理,仍是一个难以达成的梦魇。
6.事实上,随着科技的进步,自动化科技的发展让业者、监管人员在废弃物清理过程的记录、验证中更为容易,也可以产生相关的报表以供存查,但目前问题在于,没有一套有效整合监控废弃物清理的系统,故即使有优良的监控工具,但缺少相关机制予以使用,导致废弃物的清理仍然成效不彰,有赖于从事业者积极研发改良。
7.有鉴于前述缺失,本案发明人积极进行研发,经过详细的实验过程与实际操作测试,进而研发出本件智能监控废弃物清理的系统与方法。
技术实现要素:
8.为克服上述缺点,本发明的目的在于提供一种智能监控废弃物清理的系统与方法,利用全程可控制的监控技术,将废弃物在清理过程的每一阶段作业详实记录,自动进行异常判断,减少人为的失误,使废弃物的清理过程安全透明,确保废弃物的清理符合要求。
9.本发明的另一目的在于提供一种智能监控废弃物清理的系统与方法,其中各阶段的作业过程采取自动化监控作业,避免人为的疏忽或窜改数据的发生,让整个废弃物的清理过程更为正确。
10.为了达到以上目的,本发明提供一种智能监控废弃物清理的系统,包括有以下作业装置:
11.运输工具,用来运输废弃物;
12.处理站,接收所述运输工具运来的所述废弃物;
13.摄影机,设置于各所述作业装置或各所述作业装置的作业路径上,以在各所述作业装置处理作业流程时进行录像;
14.控制模块,连接所述摄影机拍摄、传输影片,或者撷取所述影片的图像;
15.计算模块,连接于所述控制模块,以输入所述控制模块撷取的所述图像进行辨识;
16.传感器,设置于各所述作业装置或各所述作业路径上,并连接至所述控制模块,当所述传感器侦测异常状况发生时,经由所述控制模块撷取所述图像进行辨识,以确认是否发生异常状况。
17.根据前述系统,本发明更提供一种智能监控废弃物清理的方法,包括以下作业流程:
18.载运作业,将废弃物上料至运输工具,并运输到处理站,然后下料所述废弃物至所述处理站的处理前暂存区;
19.处理作业,将所述废弃物投料至所述处理站进行处理,然后出料移至所述处理站的处理后暂存区,暂存并等待后续处理;
20.于各所述作业流程场所设置摄影机,以及侦测异常状况发生的传感器,所述摄影机于各所述作业流程中进行录像,并由录制的影片中撷取图像进行辨识,以确认各所述作业流程中是否有异常状况发生;或者,由所述传感器侦测到异常状况发生时触发撷取所述图像进行辨识,以确认是否发生异常状况。
21.除了前述所述摄影机设定特定时间录像或者通过所述传感器触发录像外,还可由所述摄影机通过所述图像辨识方法,判断各所述作业流程是否正在作业,或是否有特定物体进入作业地点,自动触发所述摄影机进行录像,并撷取所述影片中的所述图像进行辨识。
附图说明
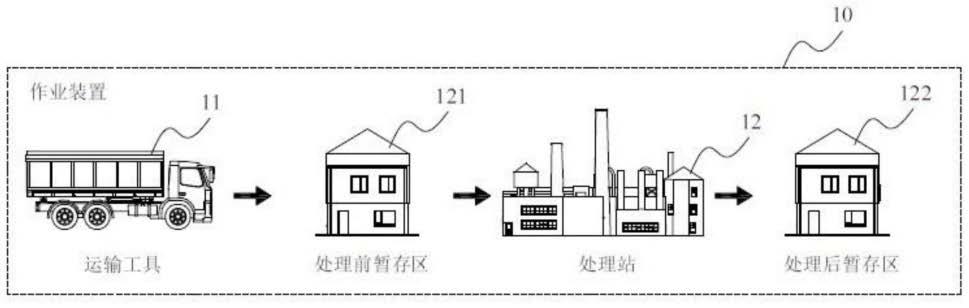
22.图1表示本发明实施例的智能监控废弃物清理的系统架构图;
23.图2表示本发明实施例的智能监控废弃物清理的系统的监控相关装置结构示意图;
24.图3表示本发明实施例的智能监控废弃物清理的系统的整体作业流程图;
25.图4表示本发明实施例的智能监控废弃物清理的方法的图像辨识作业流程图;
26.图5表示本发明实施例的智能监控废弃物清理的方法的图像辨识种示意图;
27.图6表示本发明实施例的智能监控废弃物清理的方法的各阶段图像辨识种示意图。
28.附图标记说明:
29.3-1~3-2、4-1~4-3、6-1~6-4:步骤;
30.10:作业装置;
31.11:运输工具;
32.12:处理站;
33.121:处理前暂存区;
34.122:处理后暂存区;
35.21:摄影机;
36.22:控制模块;
37.23:计算模块;
38.24:传感器;
39.25:储存模块;
40.50:图像辨识;
41.51:图像相似度辨识;
42.52:存量辨识;
43.53:对象辨识;
44.54:对象动作辨识;
45.55:对象定位辨识。
具体实施方式
46.请参阅图1所示,本发明提供一种智能监控废弃物清理的系统,包括有以下作业装置10:
47.运输工具11,例如垃圾车、资源回收车等,用来运输废弃物;
48.处理站12,用来处理所述废弃物,所述处理站12设置有处理前暂存区121与处理后暂存区122,当所述运输工具11装载所述废弃物后,会移动至所述处理站12,并先放到所述处理前暂存区121存放,待完成检查后,再一一送入所述处理站12进行处理,处理后剩余的产品,依照废弃物特性、种类或处理方式分类堆放到所述处理后暂存区122,再由相关业者进行后续处理。
49.请参阅图2所示,配合前述各作业装置10,本发明的智能监控废弃物清理的系统,主要具有下述监控相关装置:
50.摄影机21,设置于各所述作业装置10或各所述作业装置10的作业路径上,以在各所述作业装置10处理作业流程时进行录像;
51.控制模块22,连接所述摄影机21进行拍摄、传输影片,或者撷取所述影片的图像;
52.计算模块23,连接于所述控制模块22,以输入所述控制模块22撷取的所述图像进行辨识;
53.传感器24,设置于各所述作业装置10或各所述作业路径上,并连接至所述控制模块22,当所述传感器24侦测异常状况发生时,经由所述控制模块22撷取所述图像进行辨识,以确认是否发生异常状况。
54.所述摄影机21可由所述控制模块22设计全程录像或定时进行录像,并设定条件撷取所述影片的图像,交由所述计算模块23进行辨识,以判断是否发生异常状况。
55.所述传感器24可为rfid标签、液位计、车斗抬升器、磅秤等装置,所述rfid卷标、所述液位计设置于所述废弃物上,用以确保所述废弃物的内容与登记数据相符,而所述车斗抬升器设置于所述运输工具11上,用以确保所述废弃物正常的装卸过程,所述磅秤则设置于各处,用以检查所述废弃物的重量以确认内容物,当然,也可为其它传感器24,视需要而进行调整。
56.另外,所述计算模块23连接有储存模块25,用以储存所述影片或所述图像,以供事后保存与查询,所述储存模块25可为本地数据库,或者,所述储存模块25为云端数据库,以方便数据存取,并防止窜改内容。
57.请复参图3所示,根据前述智能监控废弃物清理的系统,本发明提供一种智能监控废弃物清理的方法,包括以下作业流程:
58.3-1.载运作业,将所述废弃物整理、包装完成,然后上料至所述运输工具,由所述运输工具将所述废弃物载运到所述处理站,随后将所述废弃物下料并存放至所述处理站的所述处理前暂存区;
59.3-2.处理作业,将所述处理前暂存区存放的所述废弃物,投料至所述处理站以对所述废弃物进行处理,然后出料移至所述处理站的所述处理后暂存区,暂存并等待相关业者进行后续处理。
60.请参阅图4所示,配合前述各作业流程,本发明的智能监控废弃物清理的方法,主要具有下述监控流程:
61.4-1.由各所述作业流程场所设置的所述摄影机,于各所述作业流程中进行实时监控;
62.4-2.由监控画面中撷取所述图像,以进行所述图像辨识,或者由各所述作业流程场所装置的所述传感器,于各所述作业流程中进行监控,当所述图像辨识内容或所述传感器侦测到所述作业流程(上料、下料、投料等)正在作业时则进行触发录像(所述摄影机对相关的所述影片产生时间戳,通过标注的时间来自动剪辑出处在所述作业流程的所述影片),并撷取所述作业流程的所述影片中的所述图像;
63.4-3.进行在所述作业流程时的所述图像辨识,以确认各所述作业流程中是否有异常状况发生。
64.所述摄影机设定时间定时自所述作业流程的所述影片中撷取所述图像进行辨识,以确认是否有异常状况发生。
65.或者,所述摄影机设定于各所述作业流程进入必要的地点时自所述影片中撷取所述图像进行辨识,以确认是否有异常状况发生。
66.参阅图5所示,本发明所称的图像辨识50种类,主要具有下述几种:
67.图像相似度辨识51,通过相似度比对的算法分析所述图像的内容是否异常(如画面变黑),以确认各所述作业流程是否有异常状况发生;
68.存量辨识52,由所述图像中的所述废弃物形状计算所述废弃物的重量,以确认质量平衡;
69.对象辨识53,以辨识出所述图像中的人员、机具、所述废弃物、或其它产品,进一步辨识所述对象的种类,例如不同的所述废弃物种类或不同的所述产品种类等;
70.对象动作辨识54,以辨识出所述图像中的人员或物品的动作,判别所述动作是否符合目前所述作业流程的操作;以及
71.对象定位辨识55,以辨识出所述图像中的人员或物品在所述像中的位置,判别目前所述作业流程的作业位置或作业路径是否正确。
72.另外,对于图4中的步骤4-2所述的触发录像并撷取图像方法,除了由所述摄影机设定特定时间录像外,还可进一步使用以下触发录像方式:
73.4-2-1.图像辨识触发,所述摄影机通过图5的所述图像辨识方法,判断各所述作业流程是否正在作业,或者判断是否有特定物体进入作业地点,若有上述任一种情况发生则自动触发所述摄影机进行录像,并撷取所述影片中的所述图像进行辨识;或者,
74.4-2-2.所述传感器触发,以判断是否有特定物体进入作业地点?是否有特定设备被启动?或是否有所述作业流程正在作业?若有上述任一种情况发生则自动触发所述摄影机进行录像,并撷取所述影片中的所述图像进行辨识,用来判断是否有异常状况发生。
75.请参阅图6所示,针对前述图像辨识种类,各所述作业流程根据不同阶段需求,分别进行其中部分种类如下:
76.6-1.载运阶段,进行图像相似度辨识、存量辨识、对象辨识、对象动作辨识;
77.6-2.处理前暂存阶段,进行图像相似度辨识、存量辨识、对象辨识;
78.6-3.处理阶段,进行图像相似度辨识、对象辨识、对象动作辨识、对象定位辨识;以及
79.6-4.处理后暂存阶段,进行图像相似度辨识、存量辨识、对象辨识;
80.当然,各所述作业流程亦可根据需要增加其它所述图像辨识的种类,而不受限于前述种类。
81.以上所述的是本发明的优选实施方式,应当指出对于本技术领域的普通人员来说,在不脱离本发明所述的原理前提下还可以作出若干改进和润饰,这些改进和润饰也在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1