一种基于态势感知的无人机自组网路由实现方法
1.本发明涉及无人机自组网技术领域,具体涉及一种基于态势感知的无人机自组网路由实现方法。
背景技术:
2.目前,无人机自组网大多采用移动自组网网络中的路由技术,主要包括主动式路由技术、被动式路由技术以及混合式路由技术等,在组网的过程中,普遍未考虑无人机的具体情况,路由路径不稳定的同时,一旦其中的无人机节点处于源速率异常、工况异常的情况下,很容易出现网络拥塞、网络中断等不良后果的出现。
技术实现要素:
3.为解决上述问题,本发明提供了一种基于态势感知的无人机自组网路由实现方法。
4.为实现上述目的,本发明采取的技术方案为:一种基于态势感知的无人机自组网路由实现方法,包括如下步骤:s1、获取网络拓扑图、待发送的数据包、源节点及其目标节点;s2、结合所述网络拓扑图、源节点和目标节点,通过转发能量来体现各传感器节点之间的协同工作,将源节点、目标节点及源节点、目标节点之间的所有邻居节点构成一个协作体,在此基础上进行联合建模;s3、构建传感器节点源速率、传感器节点位置关系与转发能量之间的关联关系;s4、基于目标转发能量的需求实现邻居节点的选择、接入及传感器节点源速率的调整,构建目标路由路径。
5.进一步地,所述步骤s2中,结合所述网络拓扑图获取源节点和目标节点之间的所有的邻居节点,然后通过转发能量来体现各传感器节点之间的协同工作,将源节点、目标节点及所有的邻居节点构成一个协作体,在此基础上进行联合建模,构建自主网路由优化模型。
6.进一步地,每个传感器节点配置唯一的身份编码,步骤s4中通过唤醒邻居节点的方式实现邻居节点的接入。
7.进一步地,基于无人机搭载的惯导系统实现源节点、目标节点及所有的邻居节点位置参数的获取。
8.进一步地,基于待发送数据包实现目标转发能量的估算。
9.进一步地,步骤s4中,基于目标转发能量的需求,以接入邻居节点数量最少、路由路径最短为目标实现邻居节点布置图的规划,然后基于邻居节点布置图实现邻居节点的选择、接入,并基于传感器节点源速率的实时监测,根据目标转发能力实现邻居节点所在位置及源速率的调整,从而实现目标路由路径的构建。
10.进一步地,还包括:当监测到的感器节点源速率和/无人机工况落入预设的危险门
限时,以移动路径最短为目标,调用其他邻居节点,实现目标路由路径的微调的步骤。
11.本发明具有以下有益效果:充分考虑了无人机的情况,在保证路由路径稳定的同时,可以及时发现路由路径中的异常情况,并作出应急微调,尽可能避免网络拥塞、网络中断等情况的出现。
附图说明
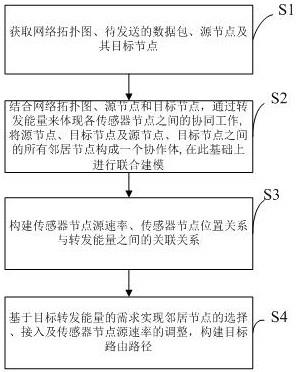
12.图1为本发明实施例1的流程图。
13.图2为本发明实施例2的流程图。
具体实施方式
14.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。
15.实施例1如图1所示,一种基于态势感知的无人机自组网路由实现方法,包括如下步骤:s1、获取网络拓扑图、待发送的数据包、源节点及其目标节点;s2、结合网络拓扑图、源节点和目标节点,通过转发能量来体现各传感器节点之间的协同工作,将源节点、目标节点及源节点、目标节点之间的所有邻居节点构成一个协作体,在此基础上进行联合建模;s3、构建传感器节点源速率、传感器节点位置关系与转发能量之间的关联关系;s4、基于目标转发能量的需求实现邻居节点的选择、接入及传感器节点源速率的调整,构建目标路由路径。
16.本实施例中,所述步骤s2中,结合所述网络拓扑图获取源节点和目标节点之间的所有的邻居节点,然后通过转发能量来体现各传感器节点之间的协同工作,将源节点、目标节点及所有的邻居节点构成一个协作体,在此基础上进行联合建模,构建自主网路由优化模型。
17.本实施例中,每个传感器节点配置唯一的身份编码,步骤s4中通过唤醒邻居节点的方式实现邻居节点的接入。
18.本实施例中,基于无人机搭载的惯导系统实现源节点、目标节点及所有的邻居节点位置参数的获取。
19.本实施例中,基于待发送数据包实现目标转发能量的估算。
20.本实施例中,步骤s4中,基于目标转发能量的需求,以接入邻居节点数量最少、路由路径最短为目标实现邻居节点布置图的规划,然后基于邻居节点布置图实现邻居节点的选择、接入,并基于传感器节点源速率的实时监测,根据目标转发能力实现邻居节点所在位置及源速率的调整,从而实现目标路由路径的构建。
21.实施例2如图2所示,一种基于态势感知的无人机自组网路由实现方法,还包括如下步骤:s5、当监测到的感器节点源速率和/无人机工况落入预设的危险门限时,以移动路径最短为目标,调用其他邻居节点,实现目标路由路径的微调。
22.其余同实施例1。
23.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
技术特征:
1.一种基于态势感知的无人机自组网路由实现方法,其特征在于:包括如下步骤:s1、获取网络拓扑图、待发送的数据包、源节点及其目标节点;s2、结合所述网络拓扑图、源节点和目标节点,通过转发能量来体现各传感器节点之间的协同工作,将源节点、目标节点及源节点、目标节点之间的所有邻居节点构成一个协作体,在此基础上进行联合建模;s3、构建传感器节点源速率、传感器节点位置关系与转发能量之间的关联关系;s4、基于目标转发能量的需求实现邻居节点的选择、接入及传感器节点源速率的调整,构建目标路由路径。2.如权利要求1所述的一种基于态势感知的无人机自组网路由实现方法,其特征在于:每个传感器节点配置唯一的身份编码,步骤s4中通过唤醒邻居节点的方式实现邻居节点的接入。3.如权利要求1所述的一种基于态势感知的无人机自组网路由实现方法,其特征在于:基于无人机搭载的惯导系统实现源节点、目标节点及所有的邻居节点位置参数的获取。4.如权利要求1所述的一种基于态势感知的无人机自组网路由实现方法,其特征在于:基于待发送数据包实现目标转发能量的估算。5.如权利要求1所述的一种基于态势感知的无人机自组网路由实现方法,其特征在于:步骤s4中,基于目标转发能量的需求,以接入邻居节点数量最少、路由路径最短为目标实现邻居节点布置图的规划,然后基于邻居节点布置图实现邻居节点的选择、接入,并基于传感器节点源速率的实时监测,根据目标转发能力实现邻居节点所在位置及源速率的调整,从而实现目标路由路径的构建。6.如权利要求1所述的一种基于态势感知的无人机自组网路由实现方法,其特征在于:还包括:当监测到的感器节点源速率和/无人机工况落入预设的危险门限时,以移动路径最短为目标,调用其他邻居节点,实现目标路由路径的微调的步骤。
技术总结
本发明公开了一种基于态势感知的无人机自组网路由实现方法,包括如下步骤:获取网络拓扑图、待发送的数据包、源节点及其目标节点;结合网络拓扑图、源节点和目标节点,通过转发能量来体现各传感器节点之间的协同工作,将源节点、目标节点及源节点、目标节点之间的所有邻居节点构成一个协作体,在此基础上进行联合建模;构建传感器节点源速率、传感器节点位置关系与转发能量之间的关联关系;基于目标转发能量的需求实现邻居节点的选择、接入及传感器节点源速率的调整,构建目标路由路径。本发明在保证路由路径稳定的同时,可以尽可能避免网络拥塞、网络中断等情况的出现。网络中断等情况的出现。网络中断等情况的出现。
技术研发人员:刘建强 孙奕颖 王毅 张文理 陈宇 刘兆瑜 赵建海 朱春峰 陈俊伊
受保护的技术使用者:郑州航空工业管理学院
技术研发日:2021.06.18
技术公布日:2021/9/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1