一种基于单站的目标被动定位方法
1.本发明属于被动定位技术,具体涉及在wi
‑
fi系统下,一种基于单站的目标被动定位方法。
背景技术:
2.近年来,随着智能设备与无线网络的普及,人们对于场景感知、环境智能等应用需要在不断增加,同时对用户位置信息精度的要求也在不断提高。
3.传统的目标被动定位研究大多基于雷达完成。基于雷达的系统通常需要配备专业的信号收发设备,使得设备成本较高。随着无线网络技术的不断提高与相关设备的普及,越来越多的研究人员开始研究利用wi
‑
fi等无线信号完成目标被动定位。被动定位系统widar2.0估计出反射信号波达角、到达时间以及多普勒信息,并结合收发两端的位置最终完成目标被动定位;被动定位系统indotrack,利用多个多天线接收机捕获反射信号并估计出信号波达角以及多普勒信息,并最终联合多个接收机估计出的结果实现目标被动定位。此类系统仅能在发射机位置已知且配备多个接收端的情况下对目标进行被动定位。
4.针对上述问题,本发明在wi
‑
fi系统下,设计了一种基于单站的目标被动定位方法。该方法在信号发射端位置未知的情况下,利用接收机配备的多天线组成天线阵列以及扩展天线,在不同的空间位置获取信号并估计出直达信号及反射信号相关参数,并利用估计的参数构建约束方程,实现对目标的被动定位。
技术实现要素:
5.本发明的目的是在wi
‑
fi系统下,提供一种基于单站的目标被动定位方法,它能在信号发射端位置未知的情况下,仅依靠单接收机获取的信息实现目标被动定位。
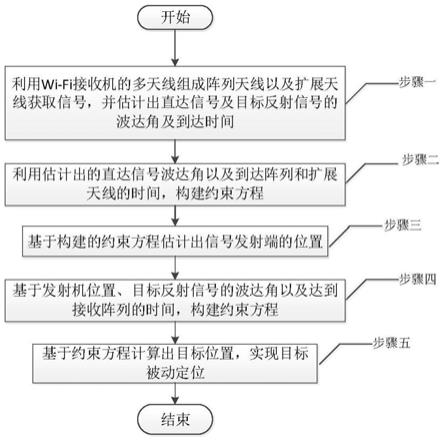
6.本发明所述的是,基于单站的目标被动定位方法,具体包括以下步骤:
7.步骤一、首先利用wi
‑
fi接收机的多天线组成阵列天线以及扩展天线获取信号,并估计出直达信号及目标反射信号的波达角及到达时间;
8.1a、利用多天线wi
‑
fi接收机的部分接收天线组成天线间距为半波长的阵列天线,利用馈线将接收机其中一根天线延伸到另一已知空间位置组成扩展天线;
9.1b、对于阵列天线,第l条传播路径,l∈{g
d
∪g
r
},g
r
为反射路径集合,g
d
为直射路径集合,第i根天线、第k个子载波接收的真实信道状态信息(channel state information,csi)信号为
[0010][0011]
其中,α
l
为衰减,τ
l
为到达时间,θ
l
为信号波达角,f
c
为中心频率,f
k
=f
c
+(k
‑
1)δf为第k个子载波的频率,δf为两个子载波之间的频率间隔,λ
b
和λ
o
分别为由分组检测时延和采样频率偏移引起的时延,e
‑
j2πβ
为由中心频率偏移引起的相位偏移,为噪声;
[0012]
1c、对于扩展天线,第l条传播路径,第k个子载波接收的真实csi信号为
[0013][0014]
其中,α
′
l
为衰减,为噪声;
[0015]
1d、利用多重信号分类算法估计出直达信号到达阵列天线的到达时间直达信号到达扩展天线的到达时间及直达信号到达阵列天线的波达角目标反射信号到达阵列天线的到达时间目标反射信号到达阵列天线的波达角
[0016]
步骤二、利用估计出的直达信号波达角以及到达阵列和扩展天线的时间,构建约束方程:
[0017][0018]
其中||
·
||2为二范数操作符,l
t
=[x
t
,y
t
]为发射机的坐标,l
a
=[x
a
,y
a
]为接收阵列的位置,l
e
=[x
e
,y
e
]为扩展天线的位置,δτ为收发两端未同步引入的时间误差,ε
ta
和ε
te
为直达信号到达时间估计误差,直达信号波达角估计误差,c为光速;
[0019]
步骤三、基于构建的约束方程估计出信号发射端的位置:
[0020][0021]
其中
[0022]
步骤四、基于估计出的发射机位置、目标反射信号的波达角以及达到接收阵列的时间,构建约束方程:
[0023][0024]
其中ε
tra
为反射信号到达时间估计误差,ε
θ
为反射信号波达角估计误差;
[0025]
步骤五、基于构建的约束方程,计算出目标位置,实现目标被动定位:
[0026][0027]
其中有益效果
[0028]
本发明首先利用接收端配备多天线组成一个阵列天线以及一根扩展天线,使得阵列和扩展天线在不同的空间位置接受信号并估计出信道状态信息;然后,基于阵列获取的信道状态信息估计出直达信号和目标反射信号的波达角以及信号到达阵列的时间,基于扩展天线获取的信道状态信息估计出直达信号和目标反射信号到达扩展天线的时间;其次,
基于估计的直达信号波达角以及到达阵列和扩展天线的时间,构建约束方程,估计出发射端的位置;最后,利用估计的发射机位置、目标反射信号波达角以及目标反射信号到达阵列的时间,构建约束方程,求解出目标位置,从而实现基于单站的目标被动定位。本发明设计了一种单站目标被动定位方法,在仅有一个多天线接收端的情况下,实现了对目标的被动定位,同时还能够实现对发射机的定位,能够更好的满足实际的定位需求。
附图说明
[0029]
图1为本发明流程图。
[0030]
图2为本发明测试场景示意图
具体实施方案
[0031]
下面结合附图进一步详细描述本发明的技术方案:
[0032]
步骤一、首先利用wi
‑
fi接收机的多天线组成阵列天线以及扩展天线获取信号,并估计出直达信号及目标反射信号的波达角及到达时间;
[0033]
1a、利用多天线wi
‑
fi接收机的部分接收天线组成天线间距为半波长的阵列天线,利用馈线将接收机其中一根天线延伸到另一已知空间位置组成扩展天线;
[0034]
1b、对于阵列天线,第l条传播路径,l∈{g
d
∪g
r
},g
r
为反射路径集合,g
d
为直射路径集合,第i根天线、第k个子载波接收的真实信道状态信息(channel state information,csi)信号为
[0035][0036]
其中,α
l
为衰减,τ
l
为到达时间,θ
l
为信号波达角,f
c
为中心频率,f
k
=f
c
+(k
‑
1)δf为第k个子载波的频率,δf为两个子载波之间的频率间隔,λ
b
和λ
o
分别为由分组检测时延和采样频率偏移引起的时延,e
‑
j2πβ
为由中心频率偏移引起的相位偏移,为噪声;
[0037]
1c、对于扩展天线,第l条传播路径,第k个子载波接收的真实csi信号为
[0038][0039]
其中,α
′
l
为衰减,为噪声;
[0040]
1d、利用多重信号分类算法估计出直达信号到达阵列天线的到达时间直达信号到达扩展天线的到达时间及直达信号到达阵列天线的波达角目标反射信号到达阵列天线的到达时间目标反射信号到达阵列天线的波达角
[0041]
步骤二、利用估计出的直达信号波达角以及到达阵列和扩展天线的时间,构建约束方程:
[0042][0043]
其中||
·
||2为二范数操作符,l
t
=[x
t
,y
t
]为发射机的坐标,l
a
=[x
a
,y
a
]为接收阵列的位置,l
e
=[x
e
,y
e
]为扩展天线的位置,δτ为收发两端未同步引入的时间误差,ε
ta
和ε
te
为直达信号到达时间估计误差,直达信号波达角估计误差,c为光速;
[0044]
步骤三、基于构建的约束方程估计出信号发射端的位置:
[0045][0046]
其中
[0047]
步骤四、基于估计出的发射机位置、目标反射信号的波达角以及达到接收阵列的时间,构建约束方程:
[0048][0049]
其中ε
tra
为反射信号到达时间估计误差,ε
θ
为反射信号波达角估计误差;
[0050]
步骤五、基于构建的约束方程,计算出目标位置,实现目标被动定位:
[0051][0052]
其中
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1