一种基于人脸识别的智能安防摄像头的制作方法
1.本发明涉及摄像头技术领域,特别涉及一种基于人脸识别的智能安防摄像头。
背景技术:
2.摄像头又称为电脑相机、电脑眼、电子眼等,是一种视频输入设备,被广泛的运用于视频会议,远程医疗及实时监控等方面。普通的人也可以彼此通过摄像头在网络进行有影像、有声音的交谈和沟通。另外,人们还可以将其用于当前各种流行的数码影像,影音处理等。
3.中国发明专利公开号cn112901952a,公开了名为一种具有人脸识别功能的监控摄像头,包括底座,所述底座的两端外表面均设置有防侧倒机构,所述底座的上端外表面设置有支撑杆,所述支撑杆的两端外表面设置有安装板,所述支撑杆上端外表面设置有固定板;具有,可调节摄像头角度和防止摄像头侧倒摔坏等优点。
4.但是该装置在使用时需要工作人员手动调节摄像头本体的角度,同时调节后的摄像头本体角度固定,无法适用于不同的人群;同时在实际使用时,经常会遇到人靠近摄像头本体无法及时识别的情况,此时需要人轻微晃动或移动我们的头部,才可以完成人脸识别,存在一定的使用局限性。
5.因此,有必要提供一种基于人脸识别的智能安防摄像头解决上述技术问题。
技术实现要素:
6.本发明的目的在于提供一种基于人脸识别的智能安防摄像头,以解决了上述背景技术中摄像头本体角度固定,无法适用于不同的人群,同时需要人轻微晃动或移动我们的头部,才能完成人脸识别等问题。
7.为实现上述目的,本发明通过以下技术方案予以实现:一种基于人脸识别的智能安防摄像头,包括壳体和摄像头本体,所述壳体的内部设置有驱动组件和环形罩壳,所述环形罩壳的内部环形阵列设置有六个伸缩组件,所述驱动组件在转动时通过活动配合方式驱动伸缩组件相对于环形罩壳做前后往复运动,所述驱动组件与摄像头本体转动连接,所述壳体的前表面贯穿开设有通孔,所述摄像头本体位于通孔的内部。
8.通过采用上述技术方案,使用时启动驱动组件,带动摄像头本体在通孔内开始缓慢逆时针转动,同时驱动组件还可以实现伸缩组件的前后往复运动,又因为驱动组件与摄像头本体之间转动连接,且随着摄像头本体的转动,其后表面会与伸缩组件接触,进而可以实现摄像头本体的角度微调节,其具体工作过程如下:转动过程中,驱动组件首先与a伸缩组件(a伸缩组件为从壳体正前方看中间最上方的伸缩组件,b伸缩组件、c伸缩组件和d伸缩组件为从a伸缩组件逆时针方向看得到)接触,此时可以顶起摄像头本体的一侧;然后驱动组件与b伸缩组件接触,此时摄像头本体已经与a伸缩组件分离,并与b伸缩组件接触,可以顶起摄像头本体的另一侧;然后驱动组件与c伸缩组件接触,此时摄像头本体已经与b伸缩组件分离,并与c伸缩组件接触,可以再顶起摄像头本体的一侧;然后驱动组件与d伸缩组件
接触,此时摄像头本体已经与c伸缩组件分离,并与d伸缩组件接触,可以再顶起摄像头本体的另一侧,以此循环往复;在整个运动过程中,既实现了摄像头本体的持续缓慢转动,也实现了摄像头本体角度的持续调节,无需人晃动和移动头部即可快速实现人脸识别,提高了实用性。
9.作为本发明的进一步方案,所述环形罩壳与壳体的内壁固定连接,所述环形罩壳的内部开设有环形槽,所述环形罩壳的表面贯穿开设有若干个放置槽,若干个所述放置槽均与环形槽接通。
10.通过采用上述技术方案,伸缩组件配合放置槽、环形槽和驱动组件的转动可以实现前后往复运动。
11.作为本发明的进一步方案,所述驱动组件包括电机,所述电机与壳体的内壁固定连接,所述电机的输出轴固定安装有第一曲柄,所述第一曲柄远离电机的端部固定安装有第二曲柄,所述第二曲柄延伸至环形槽的内部。
12.通过采用上述技术方案,在使用时第一曲柄与摄像头本体之间通过转轴转动连接,且转轴为万向轴;通过启动电机,电机带动第一曲柄和第二曲柄逆时针转动,第一曲柄可以带动摄像头本体转动,第二曲柄则沿着环形槽完成转动,并与伸缩组件接触实现其前后往复运动。
13.作为本发明的进一步方案,所述伸缩组件包括u形支架,所述u形支架沿着环形槽和对应放置槽前后滑动,所述u形支架的顶部固定安装有导柱,所述导柱的顶部固定安装有圆顶,所述u形支架的底部固定安装有楔形块,所述u形支架的外表面且位于环形槽的内部套设有第一弹簧。
14.通过采用上述技术方案,在使用时u形支架的两端呈交错设置,且每个伸缩组件中的楔形块均朝着一个方向设置,而圆顶采用橡胶材质;当第二曲柄在环形槽内转动时,与对应的楔形块接触,带动u形支架向摄像头本体的方向移动,并同时挤压第一弹簧,此时导柱与圆顶完成对摄像头本体的顶起;而后随着第二曲柄的转动与楔形块的分离,在第一弹簧的作用下,u形支架带动导柱和圆顶自动复位。
15.作为本发明的进一步方案,所述壳体的内壁开设有第一凹槽,所述第一凹槽与通孔接通,所述第一凹槽与通孔均采用圆形设计,所述第一凹槽的内部对称设置有两个移动组件,两个所述移动组件均与摄像头本体的外表面贴合,两个所述移动组件之间通过螺栓固定连接。
16.通过采用上述技术方案,第一凹槽呈环形设计;当驱动组件带着摄像头本体在通孔内逆时针转动时,会带动两个移动组件同步运动,而开设的第一凹槽配合通孔则为移动组件的跟随运动提供了可行性;在整个移动过程中,两个移动组件始终与摄像头本体贴合,既对摄像头本体起到了一个支撑作用,防止其向下偏移,也可以防止外部杂物进入壳体的内部影响整体工作。
17.作为本发明的进一步方案,所述移动组件包括第一弧形块和第二弧形块,所述第一弧形块和第二弧形块均沿着第一凹槽来回滑动,所述第一弧形块的表面固定安装有底座,所述底座与第二弧形块之间固定安装有若干个第二弹簧,所述第一弧形块的内壁固定安装有橡胶层,所述橡胶层与摄像头本体的外表面贴合。
18.通过采用上述技术方案,第一弧形块和第二弧形块之间通过底座和第二弹簧连接
在一起,当第一弧形块随着摄像头本体转动时,不会碰到第一凹槽的槽壁,并且当第一弧形块靠近第一凹槽时,第二弧形块会受到第一凹槽的挤压,并逐渐与第一弧形块重叠;当第一弧形块远离第一凹槽时,第二弧形块在第二弹簧的作用下,逐渐与第一弧形块分离并复位。
19.作为本发明的进一步方案,所述第二弧形块的尺寸大于第一弧形块,所述第一弧形块的前表面和第二弧形块的后表面均开设有弧形槽,所述底座位于第一弧形块上的弧形槽内。
20.通过采用上述技术方案,第二弧形块的前后整体厚度与第一弧形块上的弧形槽槽深相适配,使得第二弧形块与第一弧形块重叠时可以保持高度一致,没有凸起,整体更加美观。
21.作为本发明的进一步方案,所述壳体的内壁开设有四个第二凹槽,所述壳体的底部开设有四个第三凹槽,四个所述第二凹槽与四个所述第三凹槽之间一一对应接通,对应的所述第二凹槽和第三凹槽的内部共同设置有支撑组件。所述支撑组件包括圆杆,所述圆杆的内部螺纹连接有短杆,所述短杆的底部固定安装有吸盘。
22.通过采用上述技术方案,在第二凹槽的内部和圆杆外表面且靠近顶部位置均设置有螺纹,圆杆的长度大于第二凹槽的长度;将四个支撑组件依次从第二凹槽和放置槽内取出后,通过圆杆配合第二凹槽、圆杆和短杆之间的调节,既可以实现壳体的支撑,也可以调节壳体的高度,底部的吸盘则可以与待固定面牢牢吸附在一起,减少使用过程中的晃动和偏移。
23.作为本发明的进一步方案,所述壳体的两侧侧壁、顶部和后表面均开设有四个螺纹孔,若干个所述螺纹孔之间呈两两对称设置。
24.通过采用上述技术方案,在这几个面开设的螺纹孔均与圆杆的尺寸相适配,进而使得圆杆也可以与对应的螺纹孔连接在一起,让壳体存在多种固定方式:圆杆与壳体呈上下设置、圆杆与壳体呈左右设置和圆杆位于壳体的后方,进一步提高了实用性。
25.本发明所述的一种基于人脸识别的智能安防摄像头,通过驱动组件、环形罩壳、伸缩组件和放置槽等之间的配合,既实现了摄像头本体的持续缓慢转动,也实现了摄像头本体角度的持续调节,无需人晃动和移动头部即可快速实现人脸识别;通过第一凹槽和移动组件等之间的配合,在摄像头本体的移动过程中始终与摄像头本体贴合,既对摄像头本体起到了一个支撑作用,防止其向下偏移,也可以防止外部杂物进入壳体的内部影响整体工作。
附图说明
26.下面结合附图和实施例对本发明进一步说明。
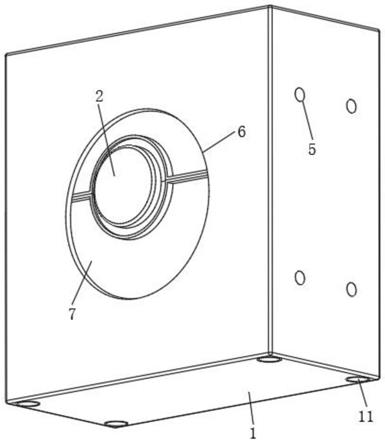
27.图1为本发明的整体结构示意图;
28.图2为本发明的驱动组件、环形罩壳和伸缩组件位置示意图;
29.图3为图2中a处结构放大图;
30.图4为本发明的伸缩组件结构示意图;
31.图5为本发明的环形罩壳仰视剖面图;
32.图6为本发明的第一凹槽仰视剖面图;
33.图7为图6中b处结构放大图;
34.图8为本发明的移动组件结构示意图;
35.图9为本发明的第二弧形块后视图;
36.图10为本发明的支撑组件结构示意图。
37.图中:1、壳体;2、摄像头本体;3、驱动组件;4、伸缩组件;5、螺纹孔;6、通孔;7、移动组件;8、第一凹槽;9、第二凹槽;10、第三凹槽;11、支撑组件;12、环形罩壳;13、环形槽;14、放置槽;301、电机;302、第一曲柄;303、第二曲柄;401、u形支架;402、导柱;403、圆顶;404、楔形块;405、第一弹簧;701、第一弧形块;702、第二弧形块;703、底座;704、第二弹簧;705、橡胶层;706、弧形槽;1101、圆杆;1102、短杆;1103、吸盘。
具体实施方式
38.实施例一:
39.如图1、图2和图4所示,本发明实施例提供一种基于人脸识别的智能安防摄像头:包括壳体1和摄像头本体2,壳体1的内部设置有驱动组件3和环形罩壳12,环形罩壳12的内部环形阵列设置有六个伸缩组件4,驱动组件3在转动时通过活动配合方式驱动伸缩组件4相对于环形罩壳12做前后往复运动,驱动组件3与摄像头本体2转动连接,壳体1的前表面贯穿开设有通孔6,摄像头本体2位于通孔6的内部。其中,摄像头本体2为现有的成熟技术,在这里不做详细说明。
40.在本实施例中,优选的,通过启动驱动组件3,带动摄像头本体2在通孔6内开始缓慢的逆时针转动,同时驱动组件3还可以实现伸缩组件4的前后往复运动,又因为驱动组件3与摄像头本体2之间转动连接,且随着摄像头本体2的转动,其后表面会与伸缩组件4接触,进而可以实现摄像头本体2的角度微调节,其具体工作过程如下:转动过程中,驱动组件3首先与a伸缩组件4(a伸缩组件4为从壳体1正前方看中间最上方的伸缩组件4,b伸缩组件4、c伸缩组件4和d伸缩组件4为从a伸缩组件4逆时针方向看得到)接触,此时a伸缩组件4向前移动顶起摄像头本体2的一侧;然后驱动组件3继续转动与a伸缩组件4分离,并与b伸缩组件4开始接触,此时a伸缩组件4向后复位,b伸缩组件4向前移动与摄像头本体2接触,可以顶起摄像头本体2的另一侧;然后驱动组件3继续转动与b伸缩组件4分离,并与c伸缩组件4开始接触,此时b伸缩组件4向后复位,c伸缩组件4向前移动,可以再次顶起摄像头本体2的一侧;然后驱动组件3继续转动与c伸缩组件4分离,并与d伸缩组件4开始接触,此时c伸缩组件4向后复位,d伸缩组件4向前移动,可以再次顶起摄像头本体2的另一侧,以此循环往复;在整个运动过程中,既实现了摄像头本体2的持续缓慢转动,也实现了摄像头本体2角度的持续调节,无需人对着摄像头本体2晃动和移动头部,而是摄像头本体2持续调节寻找人脸快速实现人脸识别。
41.实施例二:
42.如图2、图4和图5所示,在实施例一的基础上,环形罩壳12与壳体1的内壁固定连接,环形罩壳12的内部开设有环形槽13,环形罩壳12的表面贯穿开设有若干个放置槽14,若干个放置槽14均与环形槽13接通。
43.在本实施例中,优选的,摄像头本体2位于环形罩壳12的前方,驱动组件3位于环形罩壳12的内部中间位置,伸缩组件4配合开设的环形槽13、放置槽14和驱动组件3的转动,可以实现前后往复运动;
44.进一步优选的,还可以对应设置放置槽14的形状,将伸缩组件4的前后往复运动改进为倾斜式前后往复运动,且倾斜方向朝向环形罩壳12的中心,进一步减少驱动组件3转动对伸缩组件4运动的干涉。
45.实施例三:
46.如图2、图3、图4和图5所示,在实施例二的基础上,驱动组件3包括电机301,电机301与壳体1的内壁固定连接,电机301的输出轴固定安装有第一曲柄302,第一曲柄302远离电机301的端部固定安装有第二曲柄303,第二曲柄303延伸至环形槽13的内部。伸缩组件4包括u形支架401,所述u形支架401沿着环形槽13和对应放置槽14前后滑动,u形支架401的顶部固定安装有导柱402,导柱402的顶部固定安装有圆顶403,u形支架401的底部固定安装有楔形块404,u形支架401的外表面且位于环形槽13的内部套设有第一弹簧405。
47.在本实施例中,优选的,摄像头本体2通过转轴转动安装在第一曲柄302上,且转轴为万向轴;u形支架401的两端呈交错设置,且六个u形支架401底部的楔形块404均朝着一个方向设置;圆顶403采用橡胶材质;
48.通过启动电机301,电机301带动第一曲柄302和第二曲柄303逆时针转动,第一曲柄302可以带动摄像头本体2缓慢转动;第二曲柄303则沿着环形槽13开始转动,并与对应的楔形块404开始接触,带动u形支架401向摄像头本体2的方向移动,并同时挤压第一弹簧405,此时导柱402与圆顶403完成对摄像头本体2的顶起,使其角度发生改变;而后随着第二曲柄303的继续转动,与楔形块404分离,在第一弹簧405的作用下,u形支架401带动导柱402和圆顶403自动复位;在第二曲柄303的转动过程中,与每个楔形块404的接触运动过程皆相同。
49.实施例四:
50.如图1、图6和图7所示,在实施例一的基础上,壳体1的内壁开设有第一凹槽8,第一凹槽8与通孔6接通,第一凹槽8与通孔6均采用圆形设计,第一凹槽8的内部对称设置有两个移动组件7,两个移动组件7均与摄像头本体2的外表面贴合,两个移动组件7之间通过螺栓固定连接。
51.在本实施例中,优选的,第一凹槽8呈环形设计;当驱动组件3带着摄像头本体2在通孔6内逆时针转动时,会带动两个移动组件7同步运动,而开设的第一凹槽8配合通孔6则为移动组件7的跟随运动提供了可行性;在整个移动过程中,两个移动组件7始终与摄像头本体2贴合,既对摄像头本体2起到了一个支撑作用,防止其向下偏移,也可以防止外部杂物进入壳体1的内部影响整体工作。
52.实施例五:
53.如图7、图8和图9所示,在实施例四的基础上,移动组件7包括第一弧形块701和第二弧形块702,所述第一弧形块701和第二弧形块702均沿着第一凹槽8来回滑动,第一弧形块701的表面固定安装有底座703,底座703与第二弧形块702之间固定安装有若干个第二弹簧704,第一弧形块701的内壁固定安装有橡胶层705,所述橡胶层705与摄像头本体2的外表面贴合。
54.在本实施例中,优选的,两个第一弧形块701之间通过螺栓固定连接;第一弧形块701和第二弧形块702之间通过底座703和第二弹簧704连接在一起,当第一弧形块701随着摄像头本体2转动时,不会碰到第一凹槽8的槽壁,并且当第一弧形块701靠近第一凹槽8时,
第二弧形块702会受到第一凹槽8的挤压,并逐渐与第一弧形块701重叠;当第一弧形块701远离第一凹槽8时,第二弧形块702在第二弹簧704的作用下,逐渐与第一弧形块701分离并复位;在整个运动过程中,设置的橡胶层705为摄像头本体2的角度调节提供了可行性,同时也使得摄像头本体2在角度调节时,第一弧形块701不会发生前后摆动。
55.实施例六:
56.如图8和图9所示,在实施例五的基础上,第二弧形块702的尺寸大于第一弧形块701,第一弧形块701的前表面和第二弧形块702的后表面均开设有弧形槽706,底座703位于第一弧形块701上的弧形槽706内。
57.在本实施例中,优选的,第二弧形块702的前后整体厚度与第一弧形块701上的弧形槽706槽深相适配,使得第二弧形块702与第一弧形块701重叠时可以保持高度一致,减少凸起,使得整体更加美观,也降低第一凹槽8的开设难度。
58.实施例七:
59.如图1和图9所示,在实施例一的基础上,壳体1的内壁开设有四个第二凹槽9,壳体1的底部开设有四个第三凹槽10,四个第二凹槽9与四个第三凹槽10之间一一对应接通,对应的第二凹槽9和第三凹槽10的内部共同设置有支撑组件11。支撑组件11包括圆杆1101,圆杆1101的内部螺纹连接有短杆1102,短杆1102的底部固定安装有吸盘1103。
60.在本实施例中,优选的,在第二凹槽9的内部和圆杆1101外表面且靠近顶部位置均设置有螺纹,可以实现圆杆1101与第二凹槽9的连接;圆杆1101的长度大于第二凹槽9的长度,方便圆杆1101的固定和转动松开;第三凹槽10的尺寸大于吸盘1103;
61.在使用时将四个支撑组件11依次从第二凹槽9和第三凹槽10内取出后,通过圆杆1101配合第二凹槽9、圆杆1101和短杆1102之间的调节,既可以实现壳体1的支撑,也可以调节壳体1的高度,底部的吸盘1103则可以与待固定面牢牢吸附在一起,减少使用过程中的晃动和偏移。
62.实施例八:
63.如图1和图9所示,在实施例七的基础上,壳体1的两侧侧壁、顶部和后表面均开设有四个螺纹孔5,若干个螺纹孔5之间呈两两对称设置。
64.在本实施例中,优选的,在壳体1侧壁、顶部和后表面开设的螺纹孔5均与圆杆1101的尺寸相适配,进而使得圆杆1101也可以与对应的螺纹孔5连接在一起,让壳体1存在多种固定方式:圆杆1101与壳体1呈上下设置、圆杆1101与壳体1呈左右设置和圆杆1101位于壳体1的后方,进一步提高了实用性。
65.本发明的工作原理及使用方法为:使用时启动电机301,电机301带动第一曲柄302和第二曲柄303逆时针转动,第一曲柄302可以带动摄像头本体2缓慢转动;
66.第二曲柄303则沿着环形槽13开始转动,并与对应的楔形块404开始接触,带动u形支架401向摄像头本体2的方向移动,并同时挤压第一弹簧405,此时导柱402与圆顶403完成对摄像头本体2的顶起,使其角度发生改变;而后随着第二曲柄303的继续转动,与楔形块404分离,在第一弹簧405的作用下,u形支架401带动导柱402和圆顶403自动复位;其整体工作过程如下:第二曲柄303首先与a伸缩组件4的楔形块404接触,此时a伸缩组件4的导柱402向前移动顶起摄像头本体2的一侧;然后第二曲柄303继续转动与a伸缩组件4的楔形块404分离,并与b伸缩组件4的楔形块404开始接触,此时a伸缩组件4的导柱402向后复位,b伸缩
组件4的导柱402向前移动与摄像头本体2接触,可以顶起摄像头本体2的另一侧;然后第二曲柄303继续转动与b伸缩组件4楔形块404分离,并与c伸缩组件4楔形块404开始接触,此时b伸缩组件4的导柱402向后复位,c伸缩组件4的导柱402向前移动,可以再次顶起摄像头本体2的一侧;然后第二曲柄303继续转动与c伸缩组件4的楔形块404分离,并与d伸缩组件4的楔形块404开始接触,此时c伸缩组件4的导柱402向后复位,d伸缩组件4的导柱402向前移动,可以再次顶起摄像头本体2的另一侧,以此循环往复;
67.在摄像头本体2的转动过程中,两个第一弧形块701始终与摄像头本体2贴合,当第一弧形块701靠近第一凹槽8时,第二弧形块702会受到第一凹槽8的挤压,并逐渐与第一弧形块701重叠;当第一弧形块701远离第一凹槽8时,第二弧形块702在第二弹簧704的作用下,逐渐与第一弧形块701分离并复位;设置的橡胶层705为摄像头本体2的角度调节提供了可行性,同时也使得摄像头本体2在角度调节时,第一弧形块701不会发生前后摆动;
68.在使用时还可以将圆杆1101从第二凹槽9内卸下,配合短杆1102和侧壁、顶部和后表面上的螺纹孔5,形成多种固定方式:圆杆1101与壳体1呈上下设置、圆杆1101与壳体1呈左右设置和圆杆1101位于壳体1的后方,提高可选择性和适用性;
69.通过第二曲柄303、楔形块404、u形支架401和导柱402等结构的配合,既可以实现摄像头本体2的持续缓慢转动,也可以实现摄像头本体2角度的持续调节,无需人晃动和移动头部即可快速实现人脸识别;通过第一凹槽8、第一弧形块701、第二弧形块702和橡胶层705等结构的配合,使得第一弧形块701始终与摄像头本体2贴合,既为摄像头本体2起到了一个支撑作用,防止其向下偏移,也可以防止外部杂物进入壳体1的内部影响整体工作;通过第二凹槽9、第三凹槽10、圆杆1101和短杆1102等结构的配合,形成多种固定方式,提高了整体实用性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1