基于卫星平台定频解耦的光束跟踪方法与流程
1.本发明涉及一种基于卫星平台定频解耦的光束跟踪方法,属于激光通信技术领域。
背景技术:
2.与现有的微波通信技术相比,卫星激光通信技术具有数据率高、抗干扰和保密性好等显著优点,可是实现卫星平台遥感数据的高速下行传输。
3.目前的卫星激光通信终端一般重量在10kg至50kg量级,功耗100w左右,多数安装在低轨卫星或高轨卫星平台上。近些年来,随着天基互联网络的发展,微小卫星在太空中的应用越来越广泛。微小卫星平台的重量一般在100至500kg,除了平台本身重量,还要搭载遥感和测控设备,对于星载激光通信的重量要求一般在数kg量级。传统的卫星激光通信终端一般包括二维转台、光路和电控等部分,很难做到5kg以内,无法满足微小卫星搭载运行要求解决上述问题的技术手段是去掉卫星激光通信终端二维转台,利用微小卫星平台实现粗瞄准,激光通信终端仅进行光收发和精瞄准。
4.由于星地激光通信的光束宽度非常窄,一般在亚毫弧度量级,一般需要终端实时控制粗瞄装置、精瞄装置和cmos探测装置进行复合轴瞄准,以实现大范围高精度光束跟踪。由于微小卫星平台主要通过地面进行测控,星载激光通信终端无法对其进行实时控制,进行激光的粗精瞄解耦时很难达到理想效果,造成跟踪链路不稳定,严重影响星地信号传输。
5.光束跟踪是指在卫星光通信链路捕获完成之后,光通信终端根据跟踪探测器给出的瞄准角度偏差信号,实时驱动瞄准装置向着入射光角方向进行补偿的过程。跟踪的目的是克服在星间相互运动、卫星平台振动等角度变化干扰,将接收光斑始终保持在跟踪探测器中心,为卫星光通信链路的可靠通信提供有效保障用于完成光束复合轴跟踪的激光通信终端部件一般包括粗瞄装置、精瞄装置和cmos探测装置共3个,其中粗瞄装置用于大角度范围跟瞄,补偿角度偏差中的大角度低频量;精瞄装置用于小角度范围跟瞄和提前瞄准,补偿角度偏差中的小角度高频量;cmos探测通信实时调整窗口大小配合瞄粗装置和精瞄装置的光束跟踪。
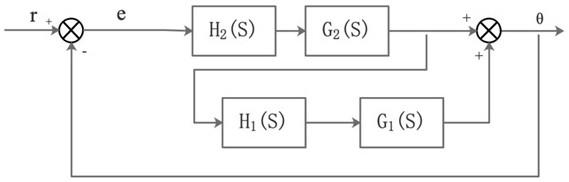
6.粗精瞄解耦控制是指通过光斑位置反馈控制精瞄实现精密跟踪,通过精瞄输出角度控制粗瞄实现对精瞄角度解耦,从而实现精瞄小角度精密跟踪和粗瞄大角度范围跟踪的相互配合,确保实现激光链路的稳定跟踪。粗精瞄解耦控制框图如图1所示。
7.系统传递函数为:其中,为粗瞄控制函数,为精瞄控制函数,为精瞄自身完成闭环之后的传递函数,为粗瞄自身完成闭环之后的传递函数,为精瞄输出角度,为光斑位置残差,通过差精瞄输出角度和光斑位置残,计算粗瞄偏转控制量,通过上位机发送至粗瞄装置实现粗精瞄解耦。
8.微小卫星对地激光通信链路中,复合轴光束跟踪需要粗瞄装置(由卫星平台完成)、精瞄装置和cmos探测装置相互配合完成。由于微小卫星的承载重量有限,需要利用卫星平台替代激光通信终端粗瞄装置实现大角度范围跟瞄,以减轻激光通信终端的重量。目前存在的主要问题是激光通信终端与卫星平台间无法实现ms量级的信号更新频率,无法保证光束跟踪精度和跟踪稳定性。
技术实现要素:
9.本发明的目的是针对微小卫星平台对地激光通信跟踪中存在的无法复合轴光束跟踪技术问题,提供一种基于卫星平台定频解耦的光束跟踪方法,通过预设一定频率的粗瞄卸载量,降低了平台与激光通信终端间信号传输速率低对实时控制的影响,实现了粗瞄和精瞄高精度复合控制,可有效提升星地激光链路跟踪性能。
10.上述的目的通过以下的技术方案实现:基于卫星平台定频解耦的光束跟踪方法,该方法包括如下步骤:步骤1、星地激光链路捕获前,激光通信终端根据卫星轨道和姿态预测数据,计算出星地激光可链路时段的平均瞄准角速率,其中 为方位轴方向平均角速率,为俯仰轴方向平均角速率;步骤2、按10ms间隔计算出星地链路时段内每个时刻的解耦量[, ],其中n表示各时刻间隔个数,s为时间单位秒,链路开始时间时刻n=0,链路过程中时间时刻,在链路开始前,将发送至卫星平台;步骤3、激光通信终端完成光束捕获后,控制精瞄装置和cmos探测装置进行光电闭环精跟踪,卫星平台根据平台时钟计算n值,按解耦量开始定频解耦瞄准;步骤4、跟踪过程中,激光通信终端计算出cmos探测器的平均残留角度误差[,],其中为方位轴方向平均残留角度误差,为俯仰轴方向平均残留角度误差,将cmos探测器的平均残留角度误差[,]作为解耦修正量,发送至卫星平台处理器;步骤5、卫星平台按修正后的解耦量持续进行定频解耦和定频修正,确保激光链路稳定跟踪,直至链路结束。
[0011]
进一步地,步骤1中所述平均瞄准角速率的计算方法如下:利用卫星轨道位置矢量和地面站位置矢量,计算出卫星与地面站连接矢量,式中表示t时刻卫星瞄准地面站的瞄准矢量;将变换至卫星激光通信终端瞄准坐标系,即:,为考虑姿态预测数据后的地心赤道坐标系到激光通信终端坐标系变换矩阵,、和分别为在终端瞄准坐标系中的分量,、和分别为终端瞄准坐标系三个坐标轴的单位矢量;
设链路开始时间为,链路结束时间为,则,则式中、和分别为时刻卫星瞄准地面站的瞄准矢量在终端瞄准坐标系中的分量,、和分别为时刻卫星瞄准地面站的瞄准矢量在终端瞄准坐标系中的分量。
[0012]
进一步地,步骤3中所述定频解耦瞄准跟踪的频率为每间隔10ms执行一次。
[0013]
进一步地,步骤5中所述定频修正为1s时间隔一次。
[0014]
有益效果:本发明通过预设一定频率的粗瞄卸载量,降低了平台与激光通信终端间信号传输速率低对实时控制的影响,实现了粗瞄和精瞄高精度复合控制,可有效提升星地激光链路跟踪性能。本发明提出的方法在地面实验室内开展了等效验证。试验以500km轨道高度微小卫星对地激光通信链路作为用例,通过二维转台模拟卫星平台轨道和姿态形成的相对角运动,通过振镜模拟卫星平台微振动,通过平行光管和光衰减器模拟激光光束远程传输效果。试验结果表明,采用本发明提出的方法,可实现卫星平台和激光通信终端间复合轴稳定跟踪,跟踪精度优于5urad,可有效保证星地激光信号的高速传输。
附图说明
[0015]
图1是本发明的背景技术中提到的粗精瞄解耦控制框图。
具体实施方式
[0016]
本实施例所述基于卫星平台定频解耦的光束跟踪方法,该方法包括如下步骤:步骤1、星地激光链路捕获前,激光通信终端根据卫星轨道和姿态预测数据,计算出星地激光可链路时段的平均瞄准角速率,其中 为方位轴方向平均角速率,为俯仰轴方向平均角速率;步骤2、按10ms间隔计算出星地链路时段内每个时刻的解耦量[, ],其中n表示各时刻间隔个数,s为时间单位秒,链路开始时间时刻n=0,链路过程中时间时刻 ,在链路开始前,将发送至卫星平台;步骤3、激光通信终端完成光束捕获后,控制精瞄装置和cmos探测装置进行光电闭环精跟踪,卫星平台根据平台时钟计算n值,按解耦量开始定频解耦瞄准;步骤4、跟踪过程中,激光通信终端计算出cmos探测器的平均残留角度误差[,],其中为方位轴方向平均残留角度误差,为俯仰轴方向平均残留角度误差,将
cmos探测器的平均残留角度误差[,]作为解耦修正量,发送至卫星平台处理器;步骤5、卫星平台按修正后的解耦量持续进行定频解耦和定频修正,确保激光链路稳定跟踪,直至链路结束。
[0017]
本实施例中步骤1中所述平均瞄准角速率的计算方法如下:利用卫星轨道位置矢量和地面站位置矢量,计算出卫星与地面站连接矢量,式中表示t时刻卫星瞄准地面站的瞄准矢量;将变换至卫星激光通信终端瞄准坐标系,即:,为考虑姿态预测数据后的地心赤道坐标系到激光通信终端坐标系变换矩阵,、和分别为在终端瞄准坐标系中的分量,、和分别为终端瞄准坐标系三个坐标轴的单位矢量;设链路开始时间为,链路结束时间为,则,则式中、和分别为时刻卫星瞄准地面站的瞄准矢量在终端瞄准坐标系中的分量,、和分别为时刻卫星瞄准地面站的瞄准矢量在终端瞄准坐标系中的分量。
[0018]
本实施例的步骤3中所述定频解耦瞄准跟踪的频率为每间隔10ms执行一次。
[0019]
本实施例的步骤5中所述定频修正为1s时间隔一次。
[0020]
测试实例:以下以500km轨道高度微小卫星对地激光通信链路作为测试案例进行说明本发明的方法:首先根据该微小卫星轨道运行情况,计算出可链路时段的平均瞄准角速率[,]=[1.1mrad/s,0.2mrad/s];按10ms间隔计算出星地链路时段内每个时刻的解耦量,链路开始时间时刻n=0,[,]=[0,0];在链路过程中的时间时刻,若t
‑
=12.5s,则=1250,[,]=[13.75mrad,2.5mrad],将[13.75mrad,2.5mrad]并发送至微小卫星平台;控制精瞄装置和cmos探测装置进行光电闭环精跟踪,微小卫星平台根据平台时钟计算n值,按解耦量[,]开始定频解耦瞄准(每间隔10ms执行一次)。对于时刻t,则[,]=[13.75mrad,2.5mrad],其他时刻按公式计算;
跟踪过程中,激光通信终端计算出cmos探测器的平均残留角度误差[,]=[0.1mrad,0.02mra](该处为典型值,具体按实际测量结果执行),作为解耦修正量按1s时间隔发送至微小卫星平台;微小卫星平台按解耦量持续进行10ms间隔定频解耦和1s间隔定频修正,确保激光链路稳定跟踪,直至链路结束。
[0021]
以上的实施例仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明保护范围之内。本发明未涉及的技术均可通过现有的技术加以实现。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1