一种基于物联网的智慧小区安防监控系统的制作方法
1.本发明属于智慧小区领域,涉及监控技术,具体是一种基于物联网的智慧小区安防监控系统。
背景技术:
2.公开号为cn110536113a的专利公开了一种小区安防监控系统,包括监控模块、移动终端、后台监控中心和无线通讯模块;其中,监控模块安装在小区单元门处,用于探测进出小区人员的身份信息,电性连接无线通讯模块的中央处理模块,并基于中央处理模块与后台监控中心相连,将探测到的安防信号传递给后台监控中心;后台监控中心为小区物业处设置的通讯监控设备,用于接收来自监控模块的探测信号,并对探测信号进行解析和解密,再根据探测信号的来源和类别做出响应;移动终端为下载有小区安防监控系统软件的业主通讯设备,和后台监控中心之间基于无线通讯模块双向信号连接,用于接收后台监控中心发送的探测信号,并向后台监控中心提供安防信息来源。
3.但是,针对小区安防来说,其不仅仅是对小区人员进行监控,还得对小区内可能存在的威胁进行判定;上述专利并未公开针对小区内某些特定对象的危险监控,基于此,提供一种解决方案。
技术实现要素:
4.本发明的目的在于提供一种基于物联网的智慧小区安防监控系统。
5.本发明的目的可以通过以下技术方案实现:
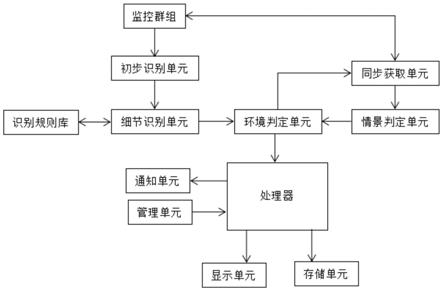
6.一种基于物联网的智慧小区安防监控系统,包括监控群组、初步识别单元、细节识别单元、识别规则库、环境判定单元、情景判定单元、同步获取单元、处理器、通知单元、管理单元、显示单元和存储单元;
7.其中,所述监控群组为设置在小区内覆盖所有区域的监控摄像头,监控群组用于获取小区的实时视频,并将实时视频传输到初步识别单元,所述初步识别单元接收监控群组传输的实时视频,并对其进行初步识别,得到所有趋向视频构成的趋向视频组;
8.所述初步识别单元用于将趋向视频组传输到细节识别单元,所述细节识别单元用于结合识别规则库对趋向视频组进行截断识别,得到目标位置和威胁系数构成的关联数据;识别规则库内存储有截断识别的具体规则;
9.所述细节识别单元用于将关联数据传输到环境判定单元,所述环境判定单元接收细节识别单元传输的关联数据,所述环境判定单元用于将关联数据内的目标位置传输到同步获取单元,同步获取单元用于根据目标位置自动获取该位置处的实时视频,所述同步获取单元用于将实时视频传输到情景判定单元,所述情景判定单元接收同步获取单元传输的实时视频并进行影响度分析,得到的所有实时视频的现场威胁值;
10.所述情景判定单元用于将现场威胁值及其对应的目标位置传输到环境判定单元;
11.环境判定单元用于根据威胁系数和现场威胁值对目标位置进行安全等级判定,具
体判定方式为:
12.ss1:根据公式计算安全逆值,具体计算方式为:
13.安全逆值=0.55*威胁系数+0.45*现场威胁值;
14.ss2:根据安全逆值产生警报信息,具体为:
15.当安全逆值低于x3时,产生初级警报;
16.当安全逆值超过x3但是小于x4时,产生中级警报;
17.当安全逆值超过x4时,产生高级警报;
18.ss3:得到所有目标位置的警报信息;
19.所述环境判定单元用于将目标位置及其对应的警报信息传输到处理器,所述处理器用于借助通知单元通知管理人员对警报信息进行处理,通知单元会按照高级警报、中级警报和初级警报的顺序依次处理;
20.所述管理单元与处理器通信连接。
21.进一步地,初步识别的具体识别方式为:
22.步骤一:初步识别单元内存有目标对象的所有照片,所有照片指代对应不同品种目标对象的照片;此处提出的目标对象可以为狗,或者其他没有经过一定束缚对人类产生影响的宠物;
23.步骤二:之后对所有的实时视频进行比对,自动识别到所有的目标对象;
24.步骤三:将目标对象所在的视频标记为趋向视频;
25.步骤四:获取到所有的趋向视频,融合得到趋向视频组。
26.进一步地,截断识别具体步骤为:
27.s1:获取到所有的趋向视频组;
28.s2:任选一趋向视频,获取到趋向视频内的目标对象;
29.s3:对目标对象的基础数据进行获取,得到认定高度和认定宽度组成基础数据;
30.s4:获取到趋向视频内的基础数据,之后对目标对象的失控值进行判定,得到对应目标对象的失控值;
31.s5:之后自动判定目标对象是否收到束缚,即为是否栓绳;当栓绳时定义受控值为0,否则定义为1.5;
32.s6:之后根据基础数据和失控值计算威胁系数值,具体计算公式为:
33.威胁系数值=(0.46*认定高度+0.54*认定宽度)*受控值*失控值;
34.s7:任选下一趋向视频,重复步骤s3-s6,得到所有趋向视频内的威胁系数;
35.s8:获取到所有趋向视频的目标位置,之后将对应的威胁系数与其关联,得到关联数据。
36.进一步地,步骤s3中的对目标对象的基础数据获取的具体获取步骤为:
37.s301:获取到目标对象的连续视频,每间隔t1时间获取一次目标对象在竖直方向的竖向高度,直到获取到x1组竖向高度;竖向高度指代为对应目标对象的身体最高部分与最低部分之差;
38.s302:得到竖向高度组di,i=1...x1;计算di的均值,将其标记为竖向均值p;
39.s303:之后获取到di中的最大值,再将p到最大值之间的di从大到小排序,取顺序位于p到最大值中间的数标记为靠中值,当靠中值存在两个时,取大的值标定为靠中值,余
下一值忽略;
40.s304:自动计算靠中值与最大值的均值,将该值标记为认定高度;
41.s305:之后每间隔t1时间获取一次目标对象在水平方向的横向宽度,直到获取到x1组横向宽度;横向宽度指代为对应目标对象的身体最前端与最后端之间的距离;t1和x1均为管理人员预设的数值;
42.s306:按照步骤s302-s304的原理对横向宽度进行相同处理,得到认定宽度;
43.s307:认定高度和认定宽度组成基础数据。
44.进一步地,步骤s4中对失控值的具体判定方式为:
45.s401:获取到距离当下最近的x2组目标对象伤人事故,x2为管理人员预设数值;统计出所有目标对象所属不同品种的事故占比,事故占比即为对应不同的品种的目标对象引发的伤人事故数量占总事故数量的比例;
46.s402:自动匹配对目标对象的所属品种,获取到其事故占比;
47.s403:根据事故占比进行失控值判定:
48.以百分之十为一个阶段,初始的处于百分之十以内时,失控值标记为1,之后每提高百分之十,失控值对应增加0.2;
49.s404:得到对应目标对象的失控值。
50.进一步地,影响度分析具体方式为:
51.s01:获取到实时视频中所有人群总数;
52.s02:通过人脸识别的方式获取到实时视频中所有人的数据,将受影响人群数量直接获取到,此处受影响人员的人脸在物业处有备份;受影响人群指代老人和小孩;
53.s03:根据人群总数和受影响人群计算现场威胁值,具体计算公式为:
54.现场威胁值=0.32/人群总数+0.68*受影响人群;
55.s04:重复上述s01-s03的步骤,得到所有实时视频的现场威胁值,并与目标位置关联。
56.进一步地,所述处理器用于将产生警报信息的目标位置的实时视频传输到显示单元进行实时显示;
57.所述处理器用于将产生警报信息的目标位置的实时视频传输到存储单元进行实时存储;
58.所述管理单元用于录入所有的预设数值。
59.本发明的有益效果:
60.本发明通过监控群组用于获取小区的实时视频,并将实时视频传输到初步识别单元,对其进行初步识别,得到所有趋向视频构成的趋向视频组;之后利用细节识别单元用于结合识别规则库对趋向视频组进行截断识别,得到目标位置和威胁系数构成的关联数据;再之后环境判定单元将关联数据内的目标位置传输到同步获取单元,借助同步获取单元根据目标位置自动获取该位置处的实时视频,并借助情景判定单元对实时视频进行影响度分析,得到的所有实时视频的现场威胁值;
61.最后利用环境判定单元根据威胁系数和现场威胁值对目标位置进行安全等级判定,判定完毕后自动给出对应的处理方案,本技术能够对特定对象的危险进行识别,并给出不同等级的预告,通知管理人员处理。
附图说明
62.为了便于本领域技术人员理解,下面结合附图对本发明作进一步的说明。
63.图1为本发明的系统框图。
具体实施方式
64.如图1所示,一种基于物联网的智慧小区安防监控系统,
65.包括监控群组、初步识别单元、细节识别单元、识别规则库、环境判定单元、情景判定单元、同步获取单元、处理器、通知单元、管理单元、显示单元和存储单元;
66.其中,所述监控群组为设置在小区内覆盖所有区域的监控摄像头,监控群组用于获取小区的实时视频,并将实时视频传输到初步识别单元,所述初步识别单元接收监控群组传输的实时视频,并对其进行初步识别,具体识别方式为:
67.步骤一:初步识别单元内存有目标对象的所有照片,所有照片指代对应不同品种目标对象的照片;此处提出的目标对象可以为狗,或者其他没有经过一定束缚对人类产生影响的宠物;
68.步骤二:之后对所有的实时视频进行比对,自动识别到所有的目标对象;
69.步骤三:将目标对象所在的视频标记为趋向视频;
70.步骤四:获取到所有的趋向视频,融合得到趋向视频组;
71.所述初步识别单元用于将趋向视频组传输到细节识别单元,所述细节识别单元用于结合识别规则库对趋向视频组进行截断识别,识别规则库内存储有截断识别的具体规则,截断识别具体步骤为:
72.s1:获取到所有的趋向视频组;
73.s2:任选一趋向视频,获取到趋向视频内的目标对象;
74.s3:对目标对象的基础数据进行获取,具体获取步骤为:
75.s301:获取到目标对象的连续视频,每间隔t1时间获取一次目标对象在竖直方向的竖向高度,直到获取到x1组竖向高度;竖向高度指代为对应目标对象的身体最高部分与最低部分之差;
76.s302:得到竖向高度组di,i=1...x1;计算di的均值,将其标记为竖向均值p;
77.s303:之后获取到di中的最大值,再将p到最大值之间的di从大到小排序,取顺序位于p到最大值中间的数标记为靠中值,当靠中值存在两个时,取大的值标定为靠中值,余下一值忽略;
78.s304:自动计算靠中值与最大值的均值,将该值标记为认定高度;
79.s305:之后每间隔t1时间获取一次目标对象在水平方向的横向宽度,直到获取到x1组横向宽度;横向宽度指代为对应目标对象的身体最前端与最后端之间的距离;t1和x1均为管理人员预设的数值;
80.s306:按照步骤s302-s304的原理对横向宽度进行相同处理,得到认定宽度;
81.s307:认定高度和认定宽度组成基础数据;
82.上述步骤s3中具体横向宽度和竖向高度数值,可以通过像素点的个数与对应高度的关系来进行计算,具体可通过提前测量任一目标对象竖向高度,之后在该视频内的像素点个数,二者之间形成换算关系,将对应的换算值应用到此处即可得到对应的横线宽度和
竖向高度的具体数值;
83.s4:获取到趋向视频内的基础数据,之后对目标对象的失控值进行判定,具体判定方式为:
84.s401:获取到距离当下最近的x2组目标对象伤人事故,x2为管理人员预设数值;统计出所有目标对象所属不同品种的事故占比,事故占比即为对应不同的品种的目标对象引发的伤人事故数量占总事故数量的比例;
85.s402:自动匹配对目标对象的所属品种,获取到其事故占比;
86.s403:根据事故占比进行失控值判定:
87.以百分之十为一个阶段,初始的处于百分之十以内时,失控值标记为1,之后每提高百分之十,失控值对应增加0.2;
88.s404:得到对应目标对象的失控值;
89.s5:之后自动判定目标对象是否收到束缚,即为是否栓绳,此为现有技术,专利网上公开诸多相关现有技术,故此处不做具体赘述;当栓绳时定义受控值为0,否则定义为1.5;
90.s6:之后根据基础数据和失控值计算威胁系数值,具体计算公式为:
91.威胁系数值=(0.46*认定高度+0.54*认定宽度)*受控值*失控值;
92.s7:任选下一趋向视频,重复步骤s3-s6,得到所有趋向视频内的威胁系数;
93.s8:获取到所有趋向视频的目标位置,之后将对应的威胁系数与其关联,得到关联数据;
94.所述细节识别单元用于将关联数据传输到环境判定单元,所述环境判定单元接收细节识别单元传输的关联数据,所述环境判定单元用于将关联数据内的目标位置传输到同步获取单元,同步获取单元用于根据目标位置自动获取该位置处的实时视频,所述同步获取单元用于将实时视频传输到情景判定单元,所述情景判定单元接收同步获取单元传输的实时视频并进行影响度分析,影响度分析具体方式为:
95.s01:获取到实时视频中所有人群总数;
96.s02:通过人脸识别的方式获取到实时视频中所有人的数据,将受影响人群数量直接获取到,此处受影响人员的人脸在物业处有备份;受影响人群指代老人和小孩;
97.s03:根据人群总数和受影响人群计算现场威胁值,具体计算公式为:
98.现场威胁值=0.32/人群总数+0.68*受影响人群;
99.式中,0.32和0.68为对应不同因素的权值,主要为对最终结果不同影响的体现;
100.s04:重复上述s01-s03的步骤,得到所有实时视频的现场威胁值,并与目标位置关联;
101.所述情景判定单元用于将现场威胁值及其对应的目标位置传输到环境判定单元;
102.环境判定单元用于根据威胁系数和现场威胁值对目标位置进行安全等级判定,具体判定方式为:
103.ss1:根据公式计算安全逆值,具体计算方式为:
104.安全逆值=0.55*威胁系数+0.45*现场威胁值;
105.ss2:根据安全逆值产生警报信息,具体为:
106.当安全逆值低于x3时,产生初级警报;
107.当安全逆值超过x3但是小于x4时,产生中级警报;
108.当安全逆值超过x4时,产生高级警报;
109.ss3:得到所有目标位置的警报信息;
110.所述环境判定单元用于将目标位置及其对应的警报信息传输到处理器,所述处理器用于借助通知单元通知管理人员对警报信息进行处理,通知单元会按照高级警报、中级警报和初级警报的顺序依次处理;
111.所述处理器用于将产生警报信息的目标位置的实时视频传输到显示单元进行实时显示;
112.所述处理器用于将产生警报信息的目标位置的实时视频传输到存储单元进行实时存储;
113.所述管理单元与处理器通信连接,所述管理单元用于录入所有的预设数值。
114.以上内容仅仅是对本发明结构所作的举例和说明,所属本技术领域的技术人员对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1