一种用于分布式大规模多天线系统的多网络辅助定位方法
1.本发明涉及无线通信、定位及机器学习技术领域,特别是涉及一种用于分布式大规模多天线系统的多网络辅助定位方法。
背景技术:
2.随着第五代(the fifth generation,5g)网络的发展,终端设备的位置信息可用于提供区域广告、内容缓存以及紧急呼叫下的人员追踪服务,这促使无线用户定位技术成为学界和业界的重要研究方向之一[1]张紫璇,黄劲安,蔡子华.5g通信定位一体化网络发展趋势探析[j].广东通信技术,2019,39(02):45
‑
49。目前,常见的室外通信系统主要采用基于卫星的全球定位系统(global positioning system,gps)来获取终端的位置信息。然而,由于卫星信号容易被地面的建筑物遮挡,gps技术无法为室内用户提供可靠的位置估计结果。此外,gps还需要在用户设备(user equipment,ue)中激活耗电量高的传感器[2]r.sharafanda.noureldin,sensor integration for satellite
‑
based vehicular navigation using neural networks[j],ieee transactions on neural networks,vol.18,no.2,pp.589
–
594,mar.2007。因此,替代gps定位的无线定位技术在当前得到了学界的广泛研究。
[0003]
面向更高的数据容量和更精确的定位功能需求,大规模多天线(massive multiple
‑
input multiple
‑
output,m
‑
mimo)辅助定位技术展现出了较好的应用前景[3]t.l.marzetta,noncooperative cellular wireless with unlimited numbers ofbase station antennas[j],ieee transactions on wireless communications,vol.9,pp.3590
–
3600,nov.2010.[4]k.n.r.s.v.prasad,e.hossain,and v.k.bhargava,machine learning methods for rss
‑
based user positioning in distributed massive mimo[j],ieee transactions on wireless communications,vol.17,pp.8402
–
8417,dec.2018。更具体地说,分布式m
‑
mimo(distributed m
‑
mimo,dm
‑
mimo)因为能够提供空间分集的增益而受到了学界广泛的关注[4]
‑
[5]v.savic and e.g.larsson,fingerprinting
‑
based positioning in distributed massive mimo systems[c],in proceedings of the 2015ieee 82nd vehicular technology conference(vtc2015
‑
fall),pp.1
–
5,sep.2015。在dm
‑
mimo系统中,大量的分布式单天线远程射频前端(remote radio head,rrh)通过高速前端链路连接到中央计算单元(computing unit,cu),可在同一时
‑
频资源上为多个ue提供服务[6]k.t.truong and r.w.heath,the viability of distributed antennas for massive mimo systems[c],in proceedings ofthe 2013asilomar conference on signals,systems and computers,pp.1318
–
1323,nov.2013。
[0004]
在基于dm
‑
mimo技术的系统中,当前学界已有针对目标ue估计位置准确性的研究。这些定位方法通常采用无线信号的某些特征信息,如到达角(angle of arrival,aoa)、到达时间(time ofarrival,toa)、接收信号强度(received signal strength,rss)等,来进
行定位功能设计[7]h.c.so and l.lin,linear least squares approach for accurate received signal strength based source localization[j],ieee transactions on signal processing,vol.59,no.8,pp.4035
–
4040,aug.2011。在这些现有方法中,基于toa的方法需要复杂和昂贵的设备来维持发射机和接收机之间的严格时间同步[8]y.t.chan and k.c.ho,a simple and efficient estimator for hyperbolic location[j],ieee transactions on signal processing,vol.42,pp.1905
–
1915,aug.1994。基于aoa的方法通常忽略了信号的反射、折射和散射的影响,这可能会导致定位性能下降[7][8]。相比之下,作为最流行的定位技术之一,基于rss的定位方法利用易于测量的rss数据,可以很容易地与dm
‑
mimo系统结合,进而提高定位性能[7]。
[0005]
考虑到各种无线传播环境的影响及大量天线带来的系统复杂性,传统的定位方法,如三角测量法、三边测量法等很难应用于dm
‑
mimo系统[9]h.q.ngo,a.ashikhmin,h.yang,e.g.larsson,and t.l.marzetta,cell
‑
free massive mimo versus small cells[j],ieee transactions on wireless communications,vol.16,pp.1834
–
1850,mar.2017,[10]z.lin,t.lv,and p.t.mathiopoulos,3
‑
d indoor positioning for millimeter
‑
wave massive mimo systems[j],ieee transactions on communications,vol.66,no.6,pp.2472
–
2486,june 2018。幸运的是,深度学习(deep learning,dl)技术的出现有望解决这一技术难题。dl技术可利用基站(base station,bs)多天线系统产生的大量数据,为dm
‑
mimo系统中的无线定位问题提供有效的支持[9]。特别地,应用dl技术,如深度置信神经网络(deep beliefnetworks,dbn)[11]g.e.hinton,s.osindero,andy.
‑
w.teh,afast learning algorithm for deep belief nets[j],neural computation,vol.18,pp.1527
–
1554,aug.2006,可从无线信号特性中提取隐藏的定位信息。例如,[12]x.gan,b.yu,l.huang,and y.li,deep learning for weights training and indoor positioning using multi
‑
sensor fingerprint[c],in proceedings of the 2017international conference on indoor positioning and indoor navigation(ipin),pp.1
–
7,sep.2017提出了一种基于dbn辅助的室内多传感器定位系统,以获得稳定充足的指纹库。同时,基于dbn,[13]h.jiang,c.peng,and j.sun,deep beliefnetwork for fingerprinting
‑
based rfid indoor localization[c],in proceedings of the icc 2019
–
2019ieee international conference on communications(icc),pp.1
–
5,jul.2019的研究人员研究了一种基于指纹的射频识别(fingerprinting
‑
based radio
‑
frequency identification,rfid)定位算法,以提高室内环境中的定位精度。在[14]r.wang,m.
‑
s.liu,y.zhou,y.
‑
q.xun,and w.
‑
b.zhang,a deep belief networks adaptive kalman filtering algorithm[c],in proceedings of the 20167th ieee international conference on software engineering and service science(icsess),pp.178
–
181,aug.2016中,作者提出了一种新型的dbn辅助的自适应卡尔曼滤波方法来修正定位系统的噪声协方差矩阵。但是,上述方法[12][13][14]没有考虑其他ue对目标ue的影响,这可能导致多用户系统中定位性能的严重下降。此外,由于没有考虑运动的连续性,这些方法也未能分析ue的轨迹,无法利用ue的历史位置信息进行潜在的性能改进。
[0006]
此外,考虑ue运动的连续性,为了有效利用ue移动轨迹信息,长期短时记忆网络(long
‑
short term memory networks,lstmn)因其处理长期/短期依赖问题的能力而受到
广泛关注[15]f.altch and a.de la fortelle,an lstm network for highway trajectory prediction[c],in proceedings of the 2017ieee 20th international conference on intelligent transportation systems(itsc),pp.353
–
359,oct.2017,[16]m.lippi,m.a.montemurro,m.degli esposti,and g.cristadoro,natural language statistical features of lstm
‑
generated texts[j],ieee transactions onneural networks and learning systems,vol.30,pp.3326
–
3337,apr.2019。例如,文献[17]j.li,q.li,n.chen,and y.wang,indoor pedestrian trajectory detection with lstm network[c],in proceedings of the 2017ieee international conference on computational science and engineering(cse),vol.1,pp.651
–
654,july 2017提出了一种基于lstmn的室内行人主轨迹检测技术。在[18]r.wang,h.luo,q.wang,z.li,f.zhao,and j.huang,a spatial
‑
temporal positioning algorithm using residual network and lstm[j],ieee transactions on instrumentation and measurement,vol.69,pp.9251
–
9261,may 2020中,作者提出了一种将残差网络和lstmn结合起来的时空定位算法,以提高基于wifi的定位系统的鲁棒性。此外,在lstmn的帮助下,[19]y.zhang,c.qu,andy.wang,an indoorpositioning methodbased on csi by using features optimization mechanism with lstm[j],ieee sensors journal,vol.20,pp.4868
–
4878,jan.2020的研究人员引入了一种优化信道状态信息振幅和相位相关数据特征比例的室内定位方法。此外,文献[20]h.hsieh,s.w.prakosa,and j.leu,towards the implementation of recurrent neural network schemes for wifi fingerprint
‑
based indoor positioning[c],in proceedings ofthe 2018ieee 88th vehicular technology conference(vtc
‑
fall),pp.1
–
5,aug.2018采用lstmn设计了基于rss的室内定位分类器。尽管如此,现有解决方法[17][18][19][20]需要大量历史轨迹信息来估计目标ue的下一个位置,因此需要花费较高的数据测量成本,不利于实际应用。
[0007]
在现实的环境中,随着用户对定位精度要求的不断提高,训练数据库也越来越大,这给数据采集带来了额外的前期工作,因而难以适应场景变化较快、采样成本较高的应用场景[21]t.liu,y.yang,g.huang,y.k.yeo,and z.lin,driver distraction detection using semi
‑
supervised machine learning[j],ieee transactions on intelligent transportation systems,vol.17,no.4,pp.1108
–
1120,apr.2016。例如,室内环境中,家具、物品等室内设施的移动以及人员走动会引起信号传播的多径和阴影效应,导致rss具有强时变性的特点,进而使得在训练数据集采集后,无法对同一位置的采样数据实现长时间的重复使用。在无定期更新维护的情况下,这会造成定位结果逐渐偏离准确值的问题[22]李燕君,徐凯锋,邵剑集.利用众包更新wi
‑
fi室内定位指纹库的方法研究[j].传感技术学报,2014(12):108
‑
114。传统基于dl的定位算法未充分考虑多用户场景中移动人员对目标用户rss的影响,未能充分利用轨迹信息,且需要较高的采样数据采集成本,故而不能充分满足现实环境定位需求,基于dl的定位算法仍有待进一步的研究。
技术实现要素:
[0008]
本发明为了解决以上至少一种技术缺陷,提供一种用于分布式大规模多天线系统的多网络辅助定位方法,此方法为一种基于衍射rss的dbn、lstmn及反向传播神经网络
(backpropagation neural networks,bpnn)辅助的三维定位(dbn
‑
lstmn
‑
bpnnaided positioning,dlbp)方法,可实现对目标用户rss向量对应的位置信息的估计。
[0009]
为解决上述技术问题,本发明的技术方案如下:
[0010]
一种用于分布式大规模多天线系统的多网络辅助定位方法,包括以下步骤:
[0011]
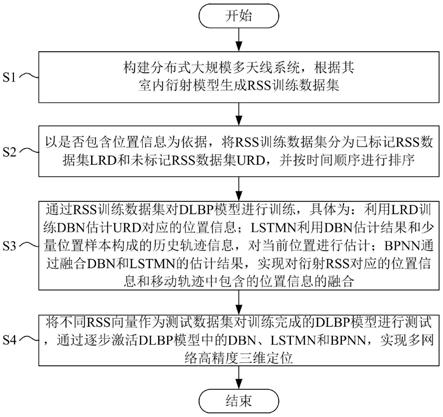
s1:构建分布式大规模多天线系统,根据其室内衍射模型生成rss训练数据集;
[0012]
s2:以是否包含位置信息为依据,将rss训练数据集分为已标记rss数据(labeled rss data,lrd)集和未标记rss数据(unlabeled rss data,urd)集,并按时间顺序进行排序;
[0013]
s3:通过rss训练数据集对dlbp模型进行训练,具体为:
[0014]
利用lrd训练dbn估计urd对应的位置信息;lstmn利用dbn估计结果和少量位置样本构成的历史轨迹信息,对当前位置进行估计;bpnn通过融合dbn和lstmn的估计结果,实现对衍射rss对应的位置信息和移动轨迹中包含的位置信息的融合;
[0015]
s4:将不同rss向量作为测试数据集对训练完成的dlbp模型进行测试,通过逐步激活dlbp模型中的dbn、lstmn和bpnn,实现多网络高精度三维定位。
[0016]
本方案提出一种用于分布式大规模多天线系统的基于衍射rss的dbn、lstmn及反向传播神经网络(back propagation neural networks,bpnn)辅助的三维定位(dbn
‑
lstmn
‑
bpnnaided positioning,dlbp)方法。基于信号衍射模型,以多天线构成的rss向量作为dbn训练集特征向量,通过利用dbn估计的位置信息和已知位置信息构成轨迹信息作为lstmn的训练集,再利用bpnn对dbn和lstmn的估计结果进行融合,进而对目标用户rss向量对应的位置信息进行最终估计。
[0017]
与现有技术相比,本发明技术方案的有益效果是:
[0018]
本发明提出了一种用于分布式大规模多天线系统的多网络辅助定位方法,基于rss的dbn定位中引入了一种用于特征采集的衍射模型,新的rss特征有效地考虑了其他ue对目标ue的影响,提高了训练后的dlbp网络在多用户场景下的适应性;利用lstmn在只有少量轨迹信息的情况下分析ue的运动轨迹,通过利用dbn估计的结果和少量的位置样本,可以有效地获得ue的完整轨迹,与传统方法相比,大大降低了历史轨迹信息采集和测量的成本;将dbn和lstmn估计结果通过bpnn结合起来的方法,能够实现较高的定位精度。
附图说明
[0019]
图1为本发明所述方法流程示意图;
[0020]
图2为本发明一实施例中dlbp模型的训练过程示意图;
[0021]
图3为本发明一实施例中以一个目标ue的角度举例说明的多用户dm
‑
mimo系统模型图;
[0022]
图4为本发明一实施例中两种典型衍射场景图;
[0023]
图5为本发明一实施例中dbn结构示意图(k
d
=3);
[0024]
图6为本发明一实施例中lstmn结构示意图;
[0025]
图7为本发明一实施例中dlbp模型测试过程示意图;
[0026]
图8为本发明一实施例中天线分布示意图(m=20);
[0027]
图9为本发明一实施例中不同rrh数对应的rmse性能仿真图;
[0028]
图10为本发明一实施例中不同lrd比例p
l
对应的rmse性能仿真图;
[0029]
图11为本发明一实施例中定位性能累积分布函数仿真图;
[0030]
图12为本发明一实施例中目标ue运动轨迹定位性能的三维可视化仿真图。
具体实施方式
[0031]
附图仅用于示例性说明,不能理解为对本专利的限制;
[0032]
为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;
[0033]
对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0034]
下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0035]
实施例1
[0036]
本发明涉及无线通信、定位及机器学习领域,包括多输入多输出(multiple
‑
input multiple
‑
output,mimo)技术、基于接收信号强度(received signal strength,rss)的定位技术、深度置信神经网络(deep beliefnetworks,dbn)、长期短时记忆网络(long
‑
short term memory networks,lstmn)、反向传播神经网络(back propagationneural networks,bpnn)等。更具体地,涉及一种用于分布式大规模多天线系统的多网络辅助定位方法,如图1所示,包括以下步骤:
[0037]
s1:构建分布式大规模多天线系统,根据其室内衍射模型生成rss训练数据集;
[0038]
s2:以是否包含位置信息为依据,将rss训练数据集分为已标记rss数据集lrd和未标记rss数据集urd,并按时间顺序进行排序;
[0039]
s3:通过rss训练数据集对dlbp模型进行训练,具体为:
[0040]
利用lrd训练dbn估计urd对应的位置信息;lstmn利用dbn估计结果和少量位置样本构成的历史轨迹信息,对当前位置进行估计;bpnn通过融合dbn和lstmn的估计结果,实现对衍射rss对应的位置信息和移动轨迹中包含的位置信息的融合;
[0041]
s4:将不同rss向量作为测试数据集对训练完成的dlbp模型进行测试,通过逐步激活dlbp模型中的dbn、lstmn和bpnn,实现多网络高精度三维定位。
[0042]
本发明的总体操作流程如图2所示,简述如下:
[0043]
首先,为了提高多网络辅助定位方法在多用户场景下的适应性以提升算法的实际可用性,基于衍射模型,本方案以多天线采集的rss向量作为特征向量,以是否包含位置信息为依据,将训练数据集分为已标记rss数据集lrd和未标记rss数据集urd,并按时间顺序进行排列。
[0044]
其次,本方案利用dbn分析衍射rss中包含的位置信息,利用lstmn分析ue移动轨迹信息,再利用bpnn对衍射rss和移动轨迹中包含的位置信息进行融合。具体地,本方案通过利用lrd训练dbn估计urd对应的位置信息。lstmn利用dbn估计结果和少量位置样本构成的历史轨迹信息,对当前位置进行估计。bpnn通过融合dbn和lstmn的估计结果,实现衍射rss和移动轨迹中包含的位置信息的融合。
[0045]
最后,本方案提出将测试数据集中的不同rss向量输入dlbp网络,通过逐步激活dlbp网络中dbn、lstmn和bpnn模块,实现高精度三维定位。
measurement model and particle filter tracking method for rss
‑
based dfl[j],ieee journal on selectedareas in communications,vol.33,pp.2391
–
2403,nov.2015:
[0055][0056]
其中,||
·
||2为模2范数,x*y为向量或矩阵x与y的内积。
[0057]
在本实施例中,基于刀锋衍射(knife edge diffraction,ked)的双径衍射模型[24],如图4所示,本发明用一个半径为r
n'
的圆柱来模拟人体,基于人体有限的大小,衍射点到圆柱质心的距离可近似为r
n'
[24]。特别地,用图4(a)和图4(b)分别表示los径有无被ue n'遮挡两种情况,可以分别观察到和不失一般性地,令p=1表示距离los较近的衍射路径并将其命名为短非视距(shortnon
‑
line
‑
of
‑
sight,s
‑
nlos)径,则另一条索引为p=2的衍射路径表示距离los较远的衍射路径,将其命名为长非视距(longnon
‑
line
‑
of
‑
sight,l
‑
nlos)径。令d
p
[s]表示第p条衍射径的第s段,p,s∈{1,2},则基于图4中的三角几何关系,有[24]:
[0058][0059]
其中,d
ij
表示节点i到节点j的距离,相比于los径,第p条衍射路径增加的距离为:
[0060][0061]
此外,衍射信号的电场强度可表示为[24]:
[0062][0063]
其中,e0为ue n'不存在时在los径测量得到的场强,由[24],fresnel
‑
kirchhoff衍射参数η
p
可表示为:
[0064][0065]
其中,sgn(
·
)为符号函数,λ为信号波长。由于式(4)无闭式解,用和来对式(4)进行近似求解[24],则:
[0066][0067]
注意到式(6)反映了两种典型场景,即ue n的信号完全被ue n'遮挡或完全不受ue n'影响,具体来说:
[0068]
情况1:ue n'有无限大的体积,即r
n'
→
∞:
[0069]
i)对于s
‑
nlos径(p=1)来说,根据式(2)和式(3)可得到δd1→
∞,则基于式(5),有η1→
∞。随后,基于式(6),由于∞。随后,基于式(6),由于则|e
d
(η1→
∞)|2→
0。
[0070]
ii)对于l
‑
nlos径(p=2)来说,与s
‑
nlos径的分析类似,可得到δd2→
∞,进而得到η2→
∞,随后,可推出|e
d
(η2→
∞)2→
0。
[0071]
总之,当r
n'
→
∞时,对式(6)的数值分析显示|e
d
(η
p
→
∞)|2→
0,p∈{1,2},这表明s
‑
nlos和l
‑
nlos径的衍射信号都非常弱。故而,式(6)可描述ue n的信号完全被ue n'遮挡的场景。
[0072]
情况2:当ue n'远离los径,即时:
[0073]
i)对于s
‑
nlos径(p=1)来说,基于式(1)可得到则根据式(2)和式(3),有δd1→
∞,进而可根据式(5)得到η1→‑
∞,将代入式(6),得到|e
d
(η1→‑
∞)2→
|e0|2。
[0074]
ii)对于l
‑
nlos径(p=2)来说,与s
‑
nlos径的分析类似,可得到e
d
(η2→
∞)|2→
0。
[0075]
总之,当时,有|e
d
(η1→‑
∞)|2→
|e0|2和|e
d
(η2→
∞)|2→
0,这说明电场强度集中于s
‑
nlos径且近似等于无ue n'时的los电场强度,即式(6)可描述ue n的信号完全不受ue n'影响的场景。
[0076]
以上分析验证了式(6)所示的衍射模型在两种“边界”情况下的有效性。然而,在实际通信中,也存在其他“中间”场景。例如,假设ue n'大小有限和在los径上/向着los径移动时,由于电场强度的期望值未知,在理论上验证式(6)的有效性具有一定挑战性。但是,从实用的角度来看,值得指出的是式(6)所示的衍射模型生成的训练数据集能够满足本发明提出的系统设计的要求,具体训练数据集生成过程如下所示。
[0077]
b.生成训练数据集
[0078]
在步骤s1中,rss训练数据集生成过程具体为:通过利用式(6),rrh m处测量得到的ue n定向电场强度e
mn
可通过对两条径的衍射信号进行求和得到,rss可表示为[24]:
[0079][0080]
其中,θ为取值(0,2π)的随机数,其取值与人体表面的粗糙度有关[24]。随后,cu基
于式(7)构建rss向量t=1,
…
,t
p
,此向量作为本发明提出的dlbp方法的输入,用以估计ue n的坐标向量其中,[x]
a
×
b
表示一个大小为a
×
b,元素为{x}的矩阵一般形式。
[0081]
具体而言,在步骤s2中,将t
p
个rss数据分为两组,即t
l
个lrd和t
u
个urd,其中t
l
+t
u
=t
p
。这两组rss数据均为当训练ue沿着由一组位置形成的给定训练路线移动时收集得到。更明确地说,lrd为由ue在房间中具有已知坐标的选定位置发送而收集得到的rss,相反,urd为ue在没有任何已知坐标信息的位置发送而收集得到的rss。注意,lrd对应的位置在路线上不一定是连续的,两个lrd对应位置间中可插入urd对应位置,然而,训练路线中最后t
a
个位置应为urd。
[0082]
定义p
l
=t
l
/t
p
为所有rss数据中lrd的比例。当然,因为必须获知、存储更多的先验坐标信息,然后由训练dbn计算,较高的p
l
将导致成本增加。因此,对于系统而言,最好能够维持一个相对较小的p
l
。
[0083]
(2)训练过程
[0084]
基于生成的数据集,本发明所提出的dlbp模型训练过程如图2所示,具体细节如下。
[0085]
在步骤s3中,基于lrd和urd训练数据集,如图2所示,本发明提出的训练过程包含dbn,lstmn和bpnn三个模块。训练目标是获得在训练路径最后的t
a
个urd对应的估计位置坐标,将这部分训练数据定义为目标rss数据(targetedrss data,trd)。如图2所示,令t
l
,t
u
和t
a
分别定义lrd,urd和trd元素的序号的集合,其中:
[0086][0087]
t
l
∪t
u
={1,
…
,t
p
}
ꢀꢀ
(9)
[0088][0089]
本发明中dbn,lstmn和bpnn三个网络的具体训练细节如下。
[0090]
a.基于dbn的rss信息分析
[0091]
dbn的训练过程具有无监督预训练的步骤[25]c.zhang and c.l.p.chen,an automatic setting for training restricted boltzmann machine[c],in proceedings ofthe2014ieee international conference on systems,man,and cybernetics(smc),pp.4037
–
4041,oct.2014,所以dbn即使在没有标记数据的情况下也可以开展训练。这意味着在极端情况下,当标记数据不可用或不足时,dbn仍然可以进行初步训练,而其他网络,如卷积神经网络(convolutional neural networks,cnn)[26]m.lei,m.jin,t.huang,z.guo,q.wang,z.wu,z.chen,x.chen,and j.zhang,ultra
‑
wideband fingerprinting positioning based on convolutional neural network[c],in proceedings of the 2020international conference on computer,information and telecommunication systems(cits),pp.1
–
5,oct.2020和递归神经网络(recurrent neural networks,rnn)[20],很可能无法训练。因此,首先利用dbn处理基于衍射模型的rss数据有利于提高实际部署中本发明所提方法的适应性和灵活性。
[0092]
举例来说,图5展示的dbn包含了k
d
=3个受限制的玻尔兹曼机(restricted boltzmann machines,rbm)[25]和一个输出层。第k个rbm r
k
包含两层,k=1,
…
,k
d
,即可视
层和隐含层其中,可视层和隐含层分别有和个单元。用和来定义和的偏置向量,并定义隐含层和可视层之间连接的权重矩阵为的偏置向量,并定义隐含层和可视层之间连接的权重矩阵为和的维度分别为和rbm的权重矩阵和偏置向量构成dbn中对应层的权重矩阵和偏置向量。如图4所示,当rbm r1的可见层充当dbn的输入层,dbn的k
d
个隐含层分别指的是k
d
个rbm的隐含层。
[0093]
基于图5所示的dbn结构,对于k=1,
…
k
d
,有[25]:
[0094][0095][0096]
其中,[
·
]
t
表示矩阵/向量的转置。同时,第k个rbm的可视层同时也可视为第k个rbm的隐含层即满足:
[0097][0098]
此外,定义第k
d
个隐含层和dbn输出层之间的权重矩阵为w
dho
,dbn输出层的偏置向量为b
do
。在本发明中,输出层包含对目标ue的三维坐标估计,则w
dho
和b
do
的维度分别为和3
×
1。为了方便起见,使用下面的参数集χ
dbn
来表示dbn:
[0099][0100]
如图5所示,在介绍dbn训练过程之前,本发明所提出的dlbp方法首先对训练数据集做重排操作,具体来说,分别将lrd和urd放在序列的头尾。然后,利用lrd对dbn进行训练,进而确定参数集χ
dbn
。然而,这里要指出,χ
dbn
的取值是取决于式(12)和式(14)的,这其中包含了多个耦合变量。所以,为了得到χ
dbn
,这些变量需要进行如下两步的解耦合。
[0101]
预训练过程:为了提高dbn的学习能力[25],首先介绍在所有rbm r
k
中的无监督预训练过程。通过此步骤,可获得式(12)中的以及可用于之后训练过程的的较好预训练版本。
[0102]
具体来说,采用对比散度(contrastive divergence,cd)算法和gibbs抽样算法[25],其特征可描述为:
[0103][0104]
其中,ε∈(0,1)是一个随机数,x
i
和y
i
分别为向量x和y的第i个元素。
[0105]
为了解耦和计算式(11),式(12)和式(14)中的多个变量,首先将带入式(14)得到:
[0106][0107]
其中,上标(
·
)
<j>
表示了预训练步骤中的第j个阶段,为rbm r
k
中的中间版本。表示隐含层被激活的概率,可表示为[25]:
intelligent computingandinternet ofthings,pp.1
–
4,2015,w
dho
,
(0)
和b
do,(0)
分别为w
dho
和b
do
通过利用高斯分布n(0,0.01)和零向量0进行初始化后的初始版本。
[0126]
此外,由于dbn的目标是从rss信息中估计位置,不同于[27]中基于指示函数的损失函数,这里,本方案用欧氏距离来衡量估计位置与实际位置之间的偏差,因此,本方法中dbn的损失函数为:
[0127][0128]
最后,本方案采用梯度下降算法[27]来更新式(14)中的参数:
[0129][0130]
这样,完成了dbn的训练过程。
[0131]
随后,式(27)中dbn已训练的dbn参数可带入式(23)
‑
式(25)以获得最终位置估计t∈t
u
。如图2所示,此估计结果会在基于lstmn和bpnn的处理模块中得到使用。
[0132]
b.基于lstmn的轨迹信息分析
[0133]
传统lstmn被广泛应用于自然语言处理(natural language processing,nlp)领域,进行连续词/句子相关性的分析[16][19]。例如,它可以根据之前学过的单词/句子预测下一个单词/句子。有趣的是,ue在空间中运动形成的连续轨迹所表现出的相关特性,似乎与nlp中单词/句子的连续性所表现出的相关特性相似。这启发了本方案将lstmn应用于定位问题,具体过程如下所述。
[0134]
在步骤s3中,图6展示了利用轨迹信息估计目标ue位置的lstmn的结构。lstmn模型可视为时间相关的神经细胞结构[17]。分别定义lstmn批次大小和lstmn中神经细胞数量[17]为n
w
和t
lstmn
,其中:
[0135]
t
lstmn
=t
p
‑
n
w
+1
ꢀꢀ
(28)
[0136]
每个细胞均包含遗忘门,输入门和输出门,每个门包含n
g
个隐含单元。如图6所示,本方案用和分别定义第t
lstmn
个细胞中遗忘门,输入门和输出门的输出,t
lstmn
=1,
…
,t
lstmn
。
[0137]
具体来说,输入门包含两个门结构,即权重矩阵为w
i
、偏置向量为b
i
的基于sigmoid函数的门,以及,权重矩阵为w
c
、偏置向量为b
c
的基于tanh函数的门。此外,分别定义遗忘门和输出门的权重矩阵为w
f
和w
o
,并定义其偏置向量为b
f
和b
o
。每个门的权重矩阵和偏置向量的大小分别为n
g
×
(n
w
‑
1+n
g
)和n
g
×
1。此外,定义w
s
为大小为1
×
n
g
的lstmn坐标估计权重向量。注意到,w
f
,w
i
,w
c
,w
o
和w
s
均使用高斯分布n(0,0.01)做初始化,b
f
,b
i
,b
c
和b
o
均初始化为零向量0。
[0138]
在如图6所示的lstmn中,本方案采用lrd的坐标和式(25)中的dbn估计位置坐标来构建lstmn训练集:
[0139][0140]
其中,为一个由构成的三维向量,κ=1,2,3分别表示{x,y,z}轴。基于
式(29),可将t
p
个重排为t
lstmn
个n
w
×
1的向量
[0141][0142]
其中,为了方便表达,定义中最后一个元素的序号为:
[0143]
μ=t
lstmn
+n
w
‑
1∈{n
w
,
…
,t
p
} (31)
[0144]
然后,可以提取的前n
w
‑
1个元素以构建:
[0145][0146]
作为历史信息,进而通过如图6所示的三个门结构,基于此历史信息来估计目标位置坐标置坐标为第t
lstmn
个细胞单元中的最后一个元素。
[0147]
更进一步的,首先,定义[
·
,
·
]表示向量拼接操作,可得到大小为(n
w
‑
1+n
g
)
×
1的向量:
[0148][0149]
则如图6所示,有[17]:
[0150][0151][0152][0153]
其中,
★
表示同样大小的两个向量元素之间的相乘:[a
i
]
l
×1★
[b
i
]
l
×1=[a1b1,
…
,a
l
b
l
]
t
。注意到,输出门的输出结果,即式(36)中的可通过式(33)
‑
式(36)的迭代进行计算,其中初始化过程为:
[0154]
其次,如图6所示,的估计结果可计算为:
[0155][0156]
对其进行矢量化,得到:
[0157][0158]
然后,选取式(38)中索引在集合t
a
内的坐标作为lstmn估计的目标坐标。特别地,为了保证式(38)序列能够提供足够数量的候选坐标,需要满足式(10)和式(31)结合得到的n
w
≤t
p
‑
t
a
+1的条件。
[0159]
接下来,从式(38)中选取出的lstmn对目标坐标的估计结果可用于基于bpnn的处理模块,具体如下。
[0160]
c.基于bpnn的信息融合
[0161]
在步骤s3中,基于dbn和lstmn的估计位置坐标,本方案综合考虑其他ue对目标ue的影响和目标ue轨迹信息,进而生成最终的位置估计结果t∈t
a
。更确切的说,本方案构建了一个可视层,隐含层和输出层分别包含v
b
,h
b
和o
b
个单元的bpnn网络。分别定义可
视层输入,可视层与隐含层之间的权重矩阵,隐含层与输出层之间的权重矩阵,隐含层的偏置和输出层的偏置为v
b
,w
bvh
,w
bho
,b
bh
和b
bo
,它们对应的维度分别为v
b
×
1,h
b
×
v
b
,o
b
×
h
b
,h
b
×
1和o
b
×
1。方便起见,用下面的参数集表示bpnn结构:
[0162]
χ
bpnn
={w
bvh
,w
bho
,b
bh
,b
bo
}
ꢀꢀ
(39)
[0163]
其中,权重矩阵w
bvh
,w
bho
和偏置向量b
bh
,b
bo
分别用高斯分布n(0,0.01)和零向量0进行初始化。
[0164]
基于对式(25)和式(38)进行的拼接操作,可得到利用v
b
,可得到结合了其他ue的影响和目标ue的轨迹信息的bpnn输出:
[0165][0166]
其中,f
b
(
·
)为激活函数[27]。
[0167]
接着,定义bpnn损失函数为:
[0168][0169]
基于梯度下降算法[27],可将式(39)中的bpnn参数集更新如下:
[0170][0171]
其中,λ
b
为学习率。
[0172]
(3)测试过程
[0173]
在步骤s4测试过程中,假设q个ue随机分布在测试区域。具体来说,如图7所示,假设第q个目标ue有t
q
<<t
p
个时域导频信号,令t
q
∈{1,
…
,t
q
}定义导频序号索引,其中q=1,
…
,q,t
q
≥n
w
‑
1。随着目标ue移动,当满足t
q
<n
w
‑
1这一条件时,训练后的dlbp网络只激活dbn模块并利用此模块分析第t
q
个rss数据,产生估计坐标并将其保存为历史轨迹。而当t
q
≥n
w
‑
1这一条件满足时,整个dlbp网络得到激活。在此情况下,dbn模块提供基于第t
q
个rss数据分析的估计坐标,lstmn提供基于ue轨迹前n
w
‑
1个位置信息分析得到的估计坐标,随后,bpnn对dbn和lstmn的估计值进行合并,并提供最终的估计结果此结果同样保存为轨迹信息,并可用于后续的位置估计过程。
[0174]
此外,本方案采用三维均方根误差(root mean square error,rmse)来量化定位精度,其定义为:
[0175][0176]
其中,为真实坐标。
[0177]
实施例3
[0178]
更具体的,为了进一步验证本方案的有益效果,如图8所示,以rrh数m=20为例,给出了两种不同天线分布的示意图,本方案展示在不同天线分布情况下dlbp方法的性能。除
非另有说明,表1中列出了主要仿真参数,其中,m和p
l
的值可能因适用的仿真场景不同而有所变化。同时,采用传统的基于dbn的定位(dbn
‑
basedpositioning,dbnp)和基于bpnn的定位(bpnn
‑
based positioning,bpnnp)方法作为比较方法。
[0179]
表1仿真参数表
[0180][0181][0182]
图9展示了不同rrh数量下的定位性能,其中,将所有训练数据中的lrd所占比例设置为p
l
=0.6。可以观察到,本方案所提出的dlbp方法在所有方法中实现了最低的rmse。此外,当增加m时,由于天线数增加会带来更大的dm
‑
mimo增益,定位系统性能可得到进一步提高,直到m>40时基本饱和。注意到这些定位方法在rrh矩形分布情况下的性能优于rrh线性
分布情况下的性能,此现象是由于前者能够提供更高的空间分集而导致的。
[0183]
其次,由图10所示,定位精度随着p
l
的增大而提高。对于dlbp方法,性能之所以得到提升是因为增加p
l
意味着可以从更多已知位置收集测量的数据,这使得dbn的估计误差有效地减少。然而,对于不能利用urd的dbnp和bpnnp方法来说,图10所示性能的改进仅仅是由更大的p
l
下训练数据量的增加而带来的。
[0184]
此外,图11表明,与dbnp和bpnnp方法相比,无论信噪比(signal
‑
to
‑
noise ratio,snr)条件如何,由累积分布函数(cumulative distribution function,cdf)分析可知,本方案所提出的dlbp方法更有可能实现更高的定位精度。
[0185]
值得注意的是,图9
‑
图11中均假设ue在测试区域内随机移动。与其相反,图12展示了目标ue沿着更规则的轨迹移动时的定位性能。可以观察到,在本方案所提出的dlbp系统中,虽然起点处出现了较高定位偏差,但其性能会随着移动轨迹逐渐改善,这是因为本方案设计的dlbp系统可以利用历史轨迹信息来修正坐标估计值,进而有助于为以后的位置估计创造更精确的历史轨迹。然而,传统的dbnp和bpnnp方法由于其非鲁棒的设计和缺乏轨迹跟踪能力的特点,其定位误差相对较高。
[0186]
综上所述,本方案基于无线室内定位场景的需求,提出了dlbp方法。该方法基于衍射模型,以多天线构成的rss向量作为特征向量,利用dbn、lstmn和bpnn来估计位置信息。基于衍射的rss特征估计位置信息的dbn模块有效地考虑了其他ue对目标ue的影响,提高了本方案所提出的定位方法在多用户场景下的适应性。同时,利用dbn估计的结果和少量的位置样本,lstmn可以以较低的采样数据采集成本分析目标ue的轨迹,进而估计当前位置坐标。此外,本方案提出了一种将dbn和lstmn估计结果相结合的bpnn的方法,得到综合考虑了其他ue对目标ue的影响和目标ue轨迹信息的位置估计结果。通过分析不同天线分布情况下的系统性能,可证明该定位方法能够实现较高的定位精度。
[0187]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1