可捕捉厘米级至无穷远目标的双目传感器阵列及使用方法与流程
本发明涉及无人机编队的视觉定位,特别地是,可捕捉厘米级至无穷远目标的双目传感器阵列及使用方法。
背景技术:
1、无人机编队是利用机器视觉相机进行捕捉目标。目前多采用至少2个可变焦相机,形成双目或多目探测。若要实现探测距离由厘米级至无穷远,相机的变焦镜头必定设计相当狭长,导致相机的安装固定及无人机编队飞行过程的控制上的不便,并且变焦镜头的造价昂贵,在恶劣环境下易损坏。
技术实现思路
1、本发明的目的是解决现有技术中的技术问题,而提供一种新型的可捕捉厘米级至无穷远目标的双目传感器阵列及使用方法。
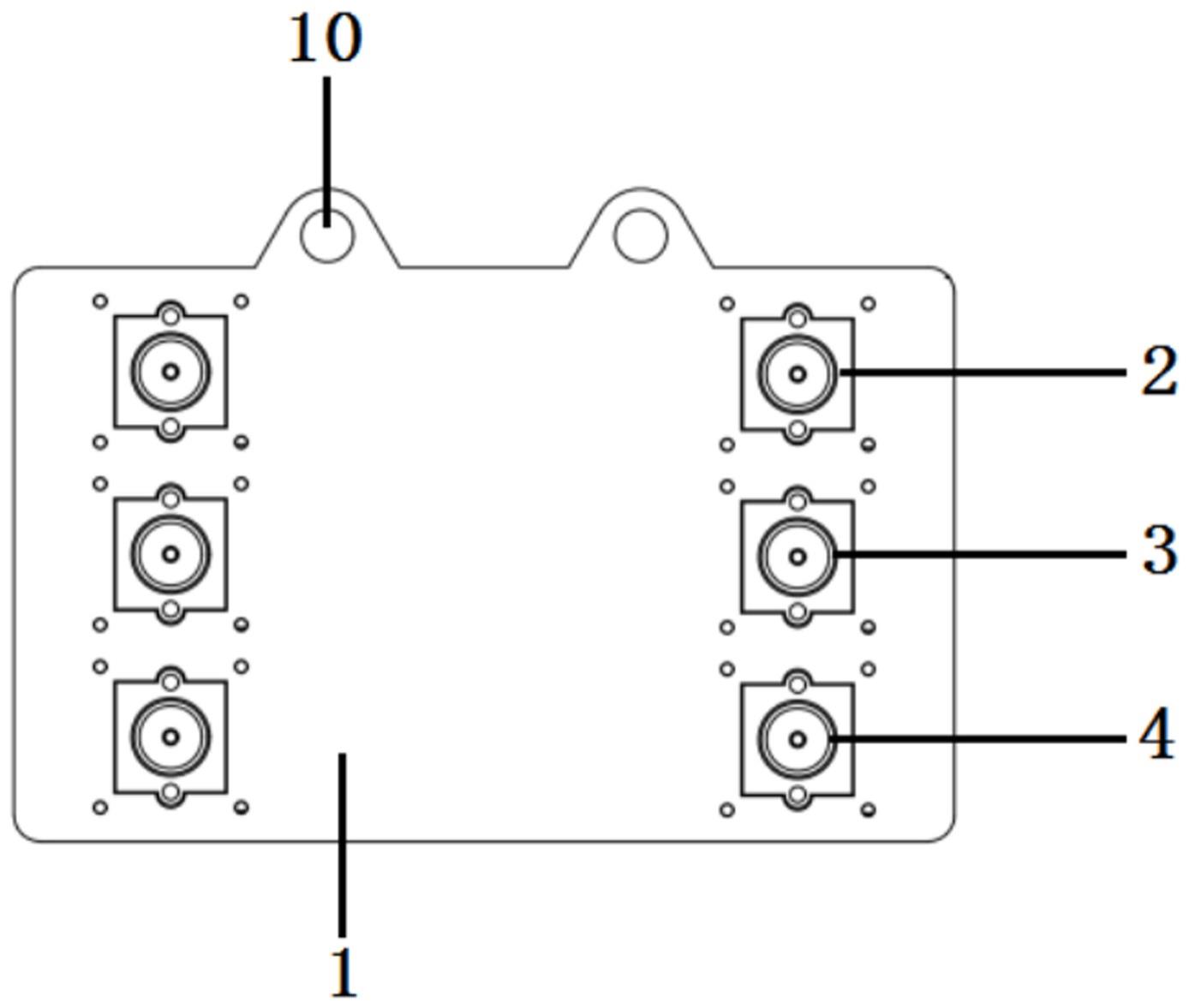
2、为了实现这一目的,本发明的技术方案如下:一种可捕捉厘米级至无穷远目标的双目传感器阵列,包含有,由上至下依次布置在阵列壳体内部的a组双目传感器、b组双目传感器及c组双目传感器,所述a组双目传感器、所述b组双目传感器、所述c组双目传感器均具有固定的焦距,所述a组双目传感器的焦距小于所述b组双目传感器的焦距,所述b组双目传感器的焦距小于所述c组双目传感器的焦距。
3、作为一种可捕捉厘米级至无穷远目标的双目传感器阵列的优选方案,所述a组双目传感器的视场角大于所述b组双目传感器的视场角,所述b组双目传感器的视场角大于所述c组双目传感器的视场角。
4、作为一种可捕捉厘米级至无穷远目标的双目传感器阵列的优选方案,所述阵列壳体形成有固定连接耳,利用所述固定连接耳将所述阵列壳体装置于无人机编队的编队僚机。
5、本发明还提供一种可捕捉厘米级至无穷远目标的双目传感器阵列的使用方法,包含有,
6、提供无人机编队,所述无人机编队具有编队长机及编队僚机;
7、提供可捕捉厘米级至无穷远目标的双目传感器阵列并且将其装置于所述编队僚机;
8、在所述无人机编队的起飞阶段,所述编队僚机以所述b组双目传感器进行目标检测和/或视觉定位所述编队长机;
9、在所述无人机编队的飞行阶段,判断所述编队长机是否超出所述b组双目传感器的视场范围:若是,则所述编队僚机以所述a组双目传感器进行目标检测和/或视觉定位所述编队长机;若否,则进一步判断所述编队长机与所述编队僚机的实时间距与第一设定阈值、第二设定阈值的关系,其中,所述第一设定阈值大于所述第二设定阈值:若所述编队长机与所述编队僚机的实时间距大于所述第一设定阈值,则所述编队僚机以所述c组双目传感器进行目标检测和/或视觉定位所述编队长机;若所述编队长机与所述编队僚机的实时间距小于所述第二设定阈值,则所述编队僚机以所述a组双目传感器进行目标检测和/或视觉定位所述编队长机;若所述编队长机与所述编队僚机的实时间距介于所述第一设定阈值与所述第二设定阈值,则所述编队僚机以所述b组双目传感器进行目标检测和/或视觉定位所述编队长机。
10、作为一种可捕捉厘米级至无穷远目标的双目传感器阵列的使用方法的优选方案,所述第一设定阈值为7m,所述第二设定阈值为2m。
11、与现有技术相比,本发明的有益效果至少在于:通过a组双目传感器、b组双目传感器及c组双目传感器的切换使用,实现大动态范围内的目标捕捉。并且,a组双目传感器、b组双目传感器及c组双目传感器均为固定的焦距,在安装和使用上都相当方便,并且造价合适,损坏率低。
技术特征:
1.可捕捉厘米级至无穷远目标的双目传感器阵列,其特征在于,包含有,由上至下依次布置在阵列壳体内部的a组双目传感器、b组双目传感器及c组双目传感器,所述a组双目传感器、所述b组双目传感器、所述c组双目传感器均具有固定的焦距,所述a组双目传感器的焦距小于所述b组双目传感器的焦距,所述b组双目传感器的焦距小于所述c组双目传感器的焦距。
2.根据权利要求1所述的可捕捉厘米级至无穷远目标的双目传感器阵列,其特征在于,所述a组双目传感器的视场角大于所述b组双目传感器的视场角,所述b组双目传感器的视场角大于所述c组双目传感器的视场角。
3.根据权利要求1或2所述的可捕捉厘米级至无穷远目标的双目传感器阵列,其特征在于,所述阵列壳体形成有固定连接耳,利用所述固定连接耳将所述阵列壳体装置于无人机编队的编队僚机。
4.可捕捉厘米级至无穷远目标的双目传感器阵列的使用方法,其特征在于,包含有,
5.根据权利要求4所述的一种可捕捉厘米级至无穷远目标的双目传感器阵列的使用方法,其特征在于,所述第一设定阈值为7m,所述第二设定阈值为2m。
技术总结
本发明公开可捕捉厘米级至无穷远目标的双目传感器阵列及使用方法。双目传感器阵列包含有,由上至下依次布置在阵列壳体内部的A组双目传感器、B组双目传感器及C组双目传感器,所述A组双目传感器、所述B组双目传感器、所述C组双目传感器均具有固定的焦距,所述A组双目传感器的焦距小于所述B组双目传感器的焦距,所述B组双目传感器的焦距小于所述C组双目传感器的焦距。本发明的有益效果在于:通过A组双目传感器、B组双目传感器及C组双目传感器的切换使用,实现大动态范围内的目标捕捉。并且,A组双目传感器、B组双目传感器及C组双目传感器均为固定的焦距,在安装和使用上都相当方便,并且造价合适,损坏率低。
技术研发人员:吴云清,徐剑峰,曾庆兵
受保护的技术使用者:上海航空电器有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!