用于线性轨迹的智能波束预测方法、装置、设备及介质与流程
1.本发明涉及毫米波mimo无线移动通信技术领域,尤其涉及一种用于线性轨迹的智能波束预测方法、装置、设备及介质。
背景技术:
2.毫米波多用户多输入多输出(mimo)无线通信使用大规模天线和波束赋形技术来解决高频段下的路径损耗问题,实现空分复用,提高频谱效率。但是,大规模天线下的移动场景尤其是高速铁路场景,波束对齐和跟踪具有大量的波束训练开销和显著的指令下达时延。因此,减少波束训练开销和指令下达时延这两个问题是目前高移动无线通信中的关键。现有的波束管理框架在上述问题解决方面仍有很大的提升空间,长时细时间颗粒度的波束预测技术能够极大地降低波束训练开销,并避免指令下达造成的时延。
3.无线通信中基于模型驱动的方法具有好的理论保证和可解释性,但是在面对包含不明确先验的线性复杂场景时,模型驱动方法不能有效解决,性能显著下降。
技术实现要素:
4.技术目的:针对现有技术中的缺陷,本发明公开了一种用于线性轨迹的智能波束预测方法、装置、设备及介质,有助于极大地降低波束对齐和跟踪中的波束训练开销和指令下达时延,提升频谱效率。
5.技术方案:为实现上述技术目的,本发明采用以下技术方案,一种用于线性轨迹的智能波束预测方法,包括步骤:
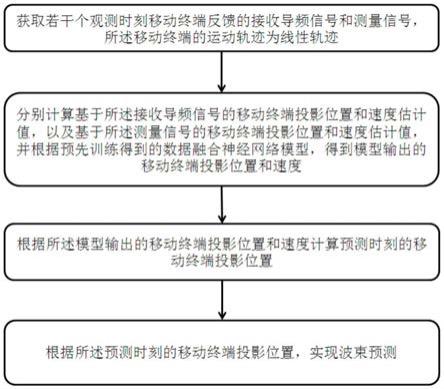
6.获取若干个观测时刻移动终端反馈的接收导频信号和测量信号,所述移动终端的运动轨迹为线性轨迹;
7.分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置估计值和速度估计值,并根据预先训练得到的数据融合神经网络模型,得到模型输出的移动终端投影位置和速度;
8.根据所述模型输出的移动终端投影位置和速度计算预测时刻的移动终端投影位置;
9.根据所述预测时刻的移动终端投影位置,实现波束预测。
10.进一步的,基于概率论的参数估计方法,分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置估计值和速度估计值;
11.所述概率论的参数估计方法包括似然估计方法和/或贝叶斯估计方法。
12.进一步的,根据所述接收导频信号确定基于接收导频信号的关于移动终端投影位置和速度的概率函数,计算基于接收导频信号的移动终端的投影位置和速度的估计值;
13.根据所述测量信号确定基于测量信号的关于移动终端投影位置和速度的概率函数,计算基于测量信号的移动终端的投影位置和速度的估计值。
14.进一步的,所述数据融合神经网络模型包括位置网络和速度网络;所述位置网络用于输出两组估计值中投影位置估计值的权重及投影位置估计值的偏差;所述速度网络用于输出两组所述估计值中速度估计值的权重及速度估计值的偏差;
15.根据投影位置估计值的偏差,对移动终端的两个投影位置估计值进行纠正,再对纠正后的估计值分配投影位置估计值的权重,得到模型输出的移动终端投影位置;
16.根据速度估计值的偏差,对移动终端的两个速度估计值进行纠正,再对纠正后的估计值分配速度估计值的权重,得到模型输出的移动终端速度。
17.进一步的,所述位置网络和速度网络均包括权重子网络和偏置子网络,所述权重子网络和偏置子网络均为包括两个隐层的神经网络模型;
18.所述权重子网络用于输出权重,所述偏置子网络用于输出偏差。
19.进一步的,根据所述预测时刻的移动终端投影位置,实现波束预测,包括:
20.根据所述预测时刻的移动终端投影位置,得到移动终端接收端的信道los的出发角,进而得到基站发射端和移动终端接收端的模拟预编码;
21.根据所述预测时刻的移动终端投影位置和所述移动终端接收端的信道los的出发角,得到虚拟信道,根据所述虚拟信道得到基站发射端数字预编码;
22.所述基站发射端模拟预编码和所述基站发射端数字预编码均用于供基站发射数据信号,所述移动终端接收端的模拟预编码用于供移动终端接收基站发射的数据信号。
23.一种用于线性轨迹的智能波束预测装置,包括:
24.获取模块,用于获取若干个观测时刻移动终端反馈的接收导频信号和测量信号,所述移动终端的运动轨迹为线性轨迹;
25.位置和速度估计模块,用于分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置和速度估计值,并根据预先训练得到的数据融合神经网络模型,得到模型输出的移动终端投影位置和速度;
26.位置预测模块,用于根据所述模型输出的移动终端投影位置和速度计算预测时刻的移动终端投影位置;
27.波束预测模块,用于根据所述预测时刻的移动终端投影位置,实现波束预测。
28.进一步的,所述数据融合神经网络模型包括位置网络和速度网络;所述位置网络用于输出两组估计值中投影位置估计值的权重及投影位置估计值的偏差;所述速度网络用于输出两组估计值中速度估计值的权重及速度估计值的偏差;
29.根据投影位置估计值的偏差,对移动终端的两个投影位置估计值进行纠正,再对纠正后的估计值分配投影位置估计值的权重,得到模型输出的移动终端投影位置估计值;
30.根据速度估计值的偏差,对移动终端的两个速度估计值进行纠正,再对纠正后的估计值分配速度估计值的权重,得到模型输出的移动终端速度估计值。
31.一种设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现前述的任意一项所述用于线性轨迹的智能波束预测方法。
32.一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行前述的任意一项所述用于线性轨迹的智能波束预测方法。
33.有益效果:本发明应用于移动终端做线性轨迹运动,通过获取若干个观测时刻移
动终端反馈的接收导频信号和测量信号,分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置和速度估计值,输入预先训练得到的数据融合神经网络模型,得到模型输出的移动终端投影位置和速度;进而计算预测时刻的移动终端投影位置;根据预测的投影位置得到基站和接收端的预编码,实现波束预测;本发明能够极大地降低波束对齐和跟踪中的波束训练开销和指令下达时延,提升频谱效率,性能显著提高。
附图说明
34.图1为本发明一个实施例中的方法流程图;
35.图2为本发明一个实施例中波束预测的流程示意图;
36.图3为本发明一个实施例中线性铁轨环境下通信场景示意图;
37.图4为本发明一个实施例中投影位置-投影位置估计mse曲线图;
38.图5为本发明一个实施例中投影位置-速度估计mse曲线图;
39.图6为本发明一个实施例中投影位置-se曲线图;
40.图7为本发明一个实施例中波束预测装置结构示意图。
具体实施方式
41.以下结合附图和实施例对本发明的一种用于线性轨迹的智能波束预测方法、装置、设备及介质做进一步的说明和解释。
42.实施例1:
43.如图1所示,一种用于线性轨迹的智能波束预测方法,包括以下步骤:
44.步骤s1,获取若干个观测时刻移动终端反馈的接收导频信号和测量信号,所述移动终端的运动轨迹为线性轨迹;
45.具体的,在每个观测时刻,基站发射端向移动终端发射一组导频信号,所述导频信号以波束的形式由基站发射,基站发射端以等时间间隔发射导频信号;基站接收移动终端反馈的接收导频信号;
46.测量信号包括doppler(多普勒)频率和相对通信时延,其中doppler频率可以通过载波频率偏移估计(cfo)获得,相对通信时延即为基站和移动终端间直线距离除以光速,可以通过毫米波测距获得;所述移动终端以所述等时间间隔反馈测量信号。
47.步骤s2,分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置和速度估计值,并根据预先训练得到的数据融合神经网络模型,得到模型输出的移动终端投影位置和速度;
48.所述概率论的参数估计方法包括似然估计方法和/或贝叶斯估计方法。但本发明不限于前述的参数估计方法。
49.根据所述接收导频信号确定基于接收导频信号的关于移动终端投影位置和速度的概率函数,计算基于接收导频信号的移动终端的投影位置和速度的估计值;
50.根据所述测量信号确定基于测量信号的关于移动终端投影位置和速度的概率函数,计算基于测量信号的移动终端的投影位置和速度的估计值。
51.所述数据融合神经网络模型包括位置网络和速度网络;所述位置网络用于输出两
组估计值中投影位置估计值的权重及投影位置估计值的偏差;所述速度网络用于输出两组估计值中速度估计值的权重及速度估计值的偏差;
52.根据投影位置估计值的偏差,对移动终端的两个投影位置估计值进行纠正,再对纠正后的估计值分配投影位置估计值的权重,得到模型输出的移动终端投影位置;
53.根据速度估计值的偏差,对移动终端的两个速度估计值进行纠正,再对纠正后的估计值分配速度估计值的权重,得到模型输出的移动终端速度。
54.所述位置网络和速度网络均包括权重子网络和偏置子网络,所述权重子网络和偏置子网络均为包括两个隐层的神经网络模型;
55.所述权重子网络用于输出权重,所述偏置子网络用于输出偏差。
56.步骤s3,根据所述模型输出的移动终端投影位置和速度计算预测时刻的移动终端投影位置;
57.结合移动终端做线性运动,可以根据所述模型输出的移动终端投影位置和速度估计值计算预测时刻的移动终端投影位置。
58.步骤s4,根据所述预测时刻的移动终端投影位置,实现波束预测。
59.所述计算预测时刻的基站发射端和移动终端接收端的模拟预编码,以及基站发射端数字预编码,包括:
60.根据所述预测时刻的移动终端投影位置,得到移动终端接收端的信道los的出发角,进而得到基站发射端和移动终端接收端的模拟预编码;
61.根据所述预测时刻的移动终端投影位置和所述移动终端接收端的信道los的出发角,得到虚拟信道,根据所述虚拟信道得到基站发射端数字预编码。
62.本发明应用于移动终端做线性轨迹运动的场景,通过获取若干个观测时刻移动终端反馈的接收导频信号和测量信号,分别计算基于所述接收导频信号以及基于所述测量信号的移动终端投影位置和速度,输入预先训练得到的数据融合神经网络模型,得到最终的移动终端投影位置和速度估计值;进而计算预测时刻的移动终端投影位置;根据预测的投影位置得到基站和接收端的预编码,实现波束预测;本发明能够极大地降低波束对齐和跟踪中的波束训练开销和指令下达时延,提升频谱效率,性能显著提高。
63.实施例2:
64.如图1和图2所示:在本实施例中,提供一种用于线性轨迹的智能波束预测方法,应用在mu-mimo毫米波通信系统,包括以下步骤:
65.步骤s1,获取若干个观测时刻移动终端反馈的接收导频信号和测量信号,所述移动终端的运动轨迹为线性轨迹;
66.如图3所示,基站(图3中的实心点tx)发射端以等时间间隔向每个移动终端分别发射一组导频信号,每个移动终端做线性轨迹运动,移动终端接收端接收所述基站发射端发射的导频信号,移动终端向基站反馈接收导频信号和测量信号;
67.测量信号包括doppler(多普勒)频率和相对通信时延,其中doppler频率可以通过载波频率偏移估计(cfo)获得,相对通信时延即为基站和移动终端间直线距离除以光速,可以通过毫米波测距获得;所述移动终端以所述等时间间隔反馈测量信号。
68.步骤s2,基于概率论的参数估计方法,分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置和速度估计
值,并根据预先训练得到的数据融合神经网络模型,得到最终的移动终端投影位置和速度;
69.考虑一个链路级mu-mimo毫米波通信系统,包括一个有n
t
根天线和n
rf
个射频单元的基站(base station,bs),以及n
rf
个有nr根天线和1个射频单元的移动终端(mobile terminal,mt)。其中,基站发射端和移动终端接收端模拟预编码器均使用离散fourier变换(discrete fourier transform,dft)码本,即和其中,a
t,n
为基站发射端射频单元n的模拟预编码向量,为基站发射端dft矩阵第i个列向量,a
t,n
和中的下标t表示transmitter,即对应的是基站发送端的发射机,ar为一个移动终端接收端的模拟预编码向量,为移动终端接收端dft矩阵第j个列向量,ar和中的下标r表示receiver,即对应的是移动终端接收端的接收机。第u个mt的天线域接收信号建模为:
70.yu=h
uat
ds+nuꢀꢀꢀꢀ
(1)
71.其中,1≤u≤n
rf’hu是基站到移动终端u的信道矩阵,a
t
为基站发射端的模拟预编码向量,码向量,是基站发射端数字预编码矩阵,s是基带信号,是移动终端u的加性gaussian噪声,下标u表示针对第u个移动终端。表示噪声方差,表示维度为nr的单位阵;
72.对于任意移动终端,毫米波信道h由k个主径组成,因此离散时间窄带信道矩阵为:
[0073][0074]
其中,αk是路径k
′
的复增益,1≤k
′
≤k,分别为接收端路径k
′
的水平到达角aoa和发射端路径k
′
的出发角aod;分别为接收端关于的天线响应和发射端关于的天线响应,其计算公式参考公式(3);上标h表示矩阵的共轭转置;φr和φ
t
分别是水平到达角(angle of arrival,aoa)和出发角(angle of departure,aod)。
[0075]
对于aoa和aod,当天线间距是载波波长一半时,基站发射端和移动终端接收端的天线响应分别为:
[0076][0077]
其中,为移动终端接收端关于的天线响应,为基站发射端关于的天线响应,为角度,公式(3)中的j是虚数,公式(3)适用于aoa和aod两种角度的计算。
[0078]
本发明适用于线性轨迹,以高铁场景为例,高铁场景下的先验信息有助于简化波束预测,其中先验被归纳为:
[0079]
①
信道总是包含一条直达径(line of sight,los,即直达径)。
[0080]
②
信道los功率远高于非直达径(non-los)。
[0081]
③
mt以某个速度v沿着铁轨匀速移动。
[0082]
④
los的出发角φ
t
和其在x轴上的投影x是一个双射。
[0083]
根据先验
①
和
②
,式(2)的信道可简化为
[0084][0085]
其中,α指代信道los的复增益,φ指代信道los的出发角φ
t
,因此,信道可用参数集合{α,φ}描述。
[0086]
根据基站接收的每个观测时刻的接收导频信号、测量信号,通过先验
③
构建的参数化线性轨迹运动模型来估计mt的投影位置和速度。观测次数为l,观测时间间隔为δt。在每个观测时刻,bs发射所有水平导频波束。首先,记第l个观测时刻的投影位置为x
l
,移动终端关于波束i的接收导频信号为:
[0087][0088]
其中,y
l,i
为波束i在观测时刻l的接收导频信号,s
p
是基站发送的导频符号向量,是基站发射端数字预编码矩阵,α
l
为第l个观测时刻的在信道los的复增益,ar(φ(x
l
)-π)为移动终端接收端天线响应,通过公式(3)计算,其中,φ(x
l
)为投影位置在x
l
处的反正切函数,计算公式参考公式(7);a
t
(φ(x
l
))为基站发射端天线响应,通过公式(3)计算,算,为定义的等式,zi(x
l
)为观测时刻l关于投影位置x
l
和波束i的接收导频信号估计值,n
l,i
为波束i在观测时刻l的加性gaussian噪声。
[0089]
通过先验
③
构建的参数化线性轨迹运动模型为:如图3所示,当铁轨被建模为平行于x轴距离为d的线性函数时,根据匀速运动先验
③
,移动终端(图3中的实心点rx)的投影位置为:
[0090][0091]
其中,x
l
为移动终端在第l个观测时刻时的投影位置,x为移动终端最后一个观测时刻(l=l)的投影位置,v为移动终端速度,l为观测总次数,δt为观测时间间隔。
[0092]
(1.3)记mt从左往右运动时v是正方向,反正切函数φ被定义为:
[0093][0094]
其中,φ
l
为在第l个观测时刻时信道los的出发角。
[0095]
所述概率论的参数估计方法包括似然估计方法和/或贝叶斯估计方法。但本发明不限于前述的参数估计方法。
[0096]
根据所述接收导频信号确定基于接收导频信号的关于移动终端位置和速度的概率函数,计算基于接收导频信号的移动终端的投影位置和速度的估计值;
[0097]
根据所述测量信号确定基于测量信号的关于移动终端位置和速度的概率函数,计算基于测量信号的移动终端的投影位置和速度的估计值。
[0098]
本实施例中采用似然估计方法,根据所述接收导频信号确定基于接收导频信号的关于移动终端投影位置和速度的似然函数,根据最大似然准则,计算基于接收导频信号的移动终端的投影位置和速度的估计值;
[0099]
根据所述测量信号确定基于测量信号的关于移动终端投影位置和速度的似然函数,根据最大似然准则,计算基于测量信号的移动终端的投影位置和速度的估计值。
[0100]
具体如下:
[0101]
关于移动终端接收的第l个观测时刻第i个天线的接收导频信号y
l,i
的后验概率为:
[0102][0103]
其中,p(y
l,i
;θ
p
)为基于接收导频信号y
l,i
关于θ
p
的后验概率,x
p,l
是移动终端在观测时刻l基于接收导频信号的投影位置,σn为加性噪声标准差,α
l
为观测时刻l的信道los复增益,zi(
·
)函数已在公式(5)中定义,为基于接收导频信号的因变量集合,为l次观测的信道los复增益集合,x
p
,v
p
分别为基于接收导频信号的移动终端投影位置和速度估计值。
[0104]
因此,关于接收导频信号(包括所有观测时刻和整个基站天线域)总的后验概率(即似然函数)为:
[0105][0106]
其中,公式(9)也是关于所述移动终端投影位置x
p
和速度v
p
的似然函数。
[0107]
依据ml准则(最大似然准则)来估计基于接收导频信号的因变量集合θ
p
,用坐标下降法来交替迭代优化θ
p
中的参数,即可得到:最终的基于所述接收导频信号的移动终端投影位置和速度估计值;
[0108]
其中,因变量集合中的参数初始化为:
[0109][0110][0111]
[0112]
其中,分别为移动终端在第l个观测时刻的投影位置初值、信道los复增益初值和速度初值;为取关于变量x
l
的最大值函数,为y
l,i
的共轭转置,为的共轭转置,maxv为取关于变量移动终端速度v的最大值函数,α
l
有闭合表达式,并且关于x
p
和v
p
的似然函数是非凸的,因此用一维搜索来参数寻优。第k次迭代的表达式为:
[0113][0114][0115][0116]
以式(11)迭代更新参数,直至满足收敛条件。
[0117]
详细的基于接收导频信号的移动终端投影位置和速度值的估计算法如下所示:
[0118]
[0119][0120]
上述{x
p
,v
p
}对应于最后一个观测时刻的基于接收导频信号的投影位置和速度估计值。
[0121]
移动终端向基站反馈与导频信号对应的测量信号,测量信号包括相对通信时延和doppler频率;基站获取测量信号中的相对通信时延τm和doppler频率f
d,m
。在第l个观测时刻,观测值为:
[0122][0123]
其中,n
τ,l
为第l个观测时刻观测相对通信时延的加性gaussian噪声(即第l个观测时刻相对通信时延的测量误差噪声),为第l个观测时刻观测doppler频率的加性gaussian噪声(即第l个观测时刻doppler频率的测量误差噪声),τ
m,l
为第l个观测时刻测量信号中的相对通信时延,是观测值,是已知量,τ
l
为第l个观测时刻的相对通信时延(即为基站和移动终端间直线距离除以光速),为真实值,f
d,m,l
为观测时刻l测量信号中的doppler频率,为观测值,是已知量,f
d,l
为观测时刻l的doppler频率,为真实值,下标m代表测量,是相对通信时延的测量误差噪声,其方差为是相对通信时延的测量误差噪声,其方差为是doppler频率的测量误差噪声,其方差为测量误差的方差建模为:
[0124][0125]
其中,c是光速,b是带宽,fc是载波频率,tc是累计时间,是残留载频比率。
[0126]
因此,投影位置和速度估计值问题为:给定接收导频信号估计mt在观测时刻l的基于接收导频信号的投影位置和速度的参数集合{x
p
,v
p
};给定测量信号包括相对通信时延和doppler频率估计mt在观测时刻l的基于测量信号的投影位置和速度的参数集合{xm,vm}。
[0127]
根据bs和mt间的几何关系,关于移动终端在第l个观测时刻的投影位置x
l
的变量集合{τ
l
,f
d,l
}为:
[0128][0129]
将根据公式(6)得到的x
l
代入公式(14)得到:τ
l
和f
d,l
;
[0130]
关于第l次观测时刻的相对通信时延和doppler频率测量值的后验概率分别为:
[0131][0132]
其中,p(τ
m,l
;θm)为基于τ
m,l
的后验概率,p(f
d,m,l
;θm)为基于f
d,m,l
的后验概率,θm={xm,vm}为基于测量信号的因变量集合。
[0133]
关于一组测量信号的总后验概率(即似然函数)为:
[0134][0135]
其中,公式(16)也是关于所述移动终端投影位置xm和速度vm的似然函数。
[0136]
基于测量信号的因变量集合θm中初始化参数为:
[0137][0138][0139]
其中,sign(
·
)是符号函数。第k次迭代的表达式为:
[0140][0141][0142]
以式(18)迭代更新参数,直至满足收敛条件。
[0143]
详细的基于测量信号的移动终端投影位置和速度的估计算法如下所示:
[0144][0145]
[0146]
上述{xm,vm}对应于最后一个观测时刻的基于测量信号的投影位置和速度估计值。
[0147]
进一步的,所述数据融合神经网络模型包括位置网络和速度网络;所述位置网络用于输出两组估计值中投影位置估计值的权重及投影位置估计值的偏差;所述速度网络用于输出两组估计值中速度估计值的权重及速度估计值的偏差;
[0148]
根据投影位置估计值的偏差,对移动终端的两个投影位置估计值进行纠正,再对纠正后的估计值分配投影位置估计值的权重,得到模型输出的移动终端投影位置;
[0149]
根据速度估计值的偏差,对移动终端的两个速度估计值进行纠正,再对纠正后的估计值分配速度估计值的权重,得到模型输出的移动终端速度。
[0150]
所述位置网络和速度网络具有相同的拓扑结构,均包括权重子网络和偏置子网络,所述权重子网络和偏置子网络均为包括两个隐层的神经网络模型;
[0151]
所述权重子网络用于输出权重,所述偏置子网络用于输出偏差。
[0152]
具体的:
[0153]
根据接收导频信号估计的参数集{x
p
,v
p
}和测量信号估计的参数集{xm,vm},作为数据融合神经网络(neural network,nn)模型h(
·
;θh)的输入,其中θh={θ
x
,θv}为数据融合神经网络模型参数,包括了位置网络h
x
的模型参数θ
x
和速度网络hv的参数θy。位置网络h
x
和速度网络hv具有相同的拓扑,且每个网络由一个权重子网络和一个偏置子网络组成,权重子网络包含输入层、两个隐层和输出层,偏置子网络包含输入层、两个隐层和输出层。权重子网络和偏置子网络的拓扑如表1所示,
[0154][0155]
其中
‘
relu’为修正线性单元(rectified linear unit,relu),
‘
bn’为批归一化(batch normalization,bn),
‘
sigmoid’为sigmoid函数,
‘
linear’为线性函数。数字则为该层计算单元数。位置网络和速度网络的表达式为:
[0156]
{w
x
,b
x,m
,b
x,p
}=h
x
({x
p
,v
p
},{xm,vm};θ
x
),
ꢀꢀꢀꢀꢀꢀꢀ
(19)
[0157]
{wv,b
v,m
,b
v,p
}=hv({x
p
,v
p
},{xm,vm};θv).
[0158]
其中,w
x
为位置网络输出的移动终端的投影位置估计值的权重,wv为速度网络输出的移动终端的速度估计值的权重,b
x,p
为位置网络输出的基于接收导频信号的移动终端的投影位置估计值的偏差,b
x,m
为位置网络输出的基于测量信号的移动终端的投影位置估计值的偏差,b
v,p
为速度网络输出的基于接收导频信号的移动终端的速度估计值的偏差,b
v,m
为速度网络输出的基于测量信号的移动终端的速度估计值的偏差;θ
x
、θv分别为位置网络hx
的可训练参数和速度网络hv的可训练参数。
[0159]
根据所述位置网络h
x
和速度网络hv输出的权重集合和偏差集合数据融合神经网络模型的输出的移动终端投影位置和速度为:
[0160][0161]
相比于一般的nn(神经网络),本发明中的数据融合神经网络模型是轻量的,能有效对抗过拟合,且具有很好的可解释性。
[0162]
数据融合神经网络模型的训练方式:数据融合神经网络模型h(
·
;θh)的训练以监督学习的方式进行,训练的输入样本为基于接收导频信号估计的参数集为{x
p
,v
p
}、基于测量信号估计的参数集为{xm,vm},输出样本为移动终端投影位置和速度标签,损失函数被定义为:
[0163][0164]
其中,下标(
·
)
tar
表示标签数据,x
tar
表示投影位置标签,v
tar
表示速度标签。参数集θh以小批量梯度下降法迭代更新直至收敛。
[0165]
步骤s3,根据所述模型输出的移动终端投影位置和速度计算预测时刻的移动终端投影位置;
[0166]
结合移动终端做线性运动,可以根据所述模型输出的移动终端投影位置和速度计算预测时刻的移动终端投影位置。
[0167]
具体的:
[0168]
考虑线性平行铁轨时,根据模型输出的投影位置和速度,得到第u个mt在第q个预测时刻的预测投影位置:
[0169]
x
q,u
=xu+vu(q-1)δt
p
ꢀꢀꢀꢀ
(22)
[0170]
其中,xu为上文计算得到的最终的移动终端u的投影位置,vu为上文计算得到的最终的移动终端u的速度,δt
p
为预测时间间隔。
[0171]
步骤s4,根据所述预测时刻的移动终端投影位置,实现波束预测。
[0172]
根据所述预测时刻的移动终端投影位置,实现波束预测,包括:
[0173]
根据所述预测时刻的移动终端投影位置,得到移动终端接收端的信道los的出发角,进而得到基站发射端和移动终端接收端的模拟预编码;
[0174]
根据所述预测时刻的移动终端投影位置和所述移动终端接收端的信道los的出发角,得到虚拟信道,根据所述虚拟信道得到基站发射端数字预编码;
[0175]
所述基站发射端模拟预编码和所述基站发射端数字预编码均用于供基站发射数据信号,所述移动终端接收端的模拟预编码用于供移动终端接收基站发射的数据信号,实现在波束预测下的数据信号传输。
[0176]
所述计算预测时刻的基站发射端和移动终端接收端的模拟预编码,以及基站发射端数字预编码,包括:
[0177]
根据所述预测时刻的移动终端投影位置,得到移动终端接收端的信道los的出发
角,进而得到基站发射端和移动终端接收端的模拟预编码;
[0178]
具体的:
[0179]
根据式(7),令x
q,u
=x
l
,得到φ
q,u
=φ
l
,φ
q,u
为第q个预测时刻、第u个mt接收端的信道los的出发角aod。
[0180]
因此,第u个mt接收端和基站发射端的模拟预编码向量分别为:
[0181][0182][0183]
基站发射端的模拟预编码矩阵为所有mt的接收端模拟预编码为
[0184]
根据所述预测时刻的移动终端投影位置和所述移动终端接收端的信道los的出发角,得到虚拟信道,根据所述虚拟信道得到基站发射端数字预编码;
[0185]
具体的:
[0186]
在第q个预测时刻,基站发射端数字预编码矩阵dq由n
rf
个预编码向量组成,即其中v
q,u
为移动终端u在第q个预测时刻的数字预编码向量。其中,数字预编码向量集合由下述优化问题得到:
[0187][0188][0189]
其中,为向量2-范数的平方,p
t,max
是bs最大发射功率,等效低维信道a
r,q,u
为移动终端u的接收端在第q个预测时刻的天线响应,h
q,u
为移动终端u的接收端在第q个预测时刻的信道矩阵,a
t,q
是基站发射端在第q个预测时刻的模拟预编码矩阵。在长时预测中,瞬时信道状态信息(instantaneous csi,i-csi)甚至统计信道状态信息(statistical csi,i-csi)难以获得。因此,本发明用虚拟信道来表征实际信道:
[0190][0191]
其中,γ是关于投影位置的幅度公式,即该投影位置的虚拟信道幅度,可通过3gpp tr 38.901中路径损耗公式得到一个估计表达式。虚拟低维等效信道即为根据最小均方误差(minimal mean square error,mmse)预编码器,基站发射端数字预编码矩阵为:
[0192][0193]
其中,其中,为维度为的n
rf
单位阵,表示噪声方差。
[0194]
本实施例中,在预测时刻q,根据基站发射端模拟预编码a
t,q
和基站数字预编码dq,基站以混合预编码(模拟预编码和数字预编码结合)来发射信号。同时,所述移动终端接收端根据所述接收端模拟预编码a
r,q
来接收信号。
[0195]
根据所述基站发射端模拟预编码和所述基站发射端数字预编码,基站以混合预编码来发射数据信号,其中,基站射频单元实现数字预编码,基站天线的移相器实现模拟预编码,射频单元和移相器全连接;同时,移动终端根据所述移动终端接收端模拟预编码来接收数据信号。
[0196]
目前的单用户波束对齐和跟踪方案中,高速铁路波束驻留周期是10ms,基站和移动终端均扫描3个水平波束,那么1s内需要扫描900个波束。而本发明中一个波束预测周期为1.25s,每个周期内基站发射3次导频信号,每次导频信号以8次波束发出,那么在1.25s内只扫描24个波束。多用户场景下,波束开销随用户数线性增长。首先,本发明有助于极大地降低波束训练开销,尤其是在多移动用户的场景下。其次,现有技术的波束对齐和跟踪方案需要将测量值反馈给基站侧,这会引入约25ms左右的指令下达时延,而本发明通过波束预测,避免了指令下达过程,因此时延为零。综上,在多用户移动场景下,本发明具有更小的波束开销和零时延,因此能极大地提升频谱效率。
[0197]
实施例3:
[0198]
如附图7所示,一种用于线性轨迹的智能波束预测装置,包括:
[0199]
获取模块,用于获取若干个观测时刻移动终端反馈的接收导频信号和测量信号,所述移动终端的运动轨迹为线性轨迹;
[0200]
位置和速度估计模块,用于分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置和速度估计值,并根据预先训练得到的数据融合神经网络模型,得到模型输出的移动终端投影位置和速度;
[0201]
位置预测模块,用于根据所述模型输出的移动终端投影位置和速度计算预测时刻的移动终端投影位置;
[0202]
波束预测模块,用于根据所述预测时刻的移动终端投影位置,实现波束预测。
[0203]
进一步的,基于概率论的参数估计方法,分别计算基于所述接收导频信号的移动终端投影位置估计值和速度估计值,以及基于所述测量信号的移动终端投影位置估计值和速度估计值;
[0204]
所述概率论的参数估计方法包括似然估计方法和/或贝叶斯估计方法。
[0205]
进一步的,根据所述接收导频信号确定基于接收导频信号的关于移动终端投影位置和速度的概率函数,计算基于接收导频信号的移动终端的投影位置和速度的估计值;
[0206]
根据所述测量信号确定基于测量信号的关于移动终端投影位置和速度的概率函数,计算基于测量信号的移动终端的投影位置和速度的估计值。
[0207]
进一步的,所述数据融合神经网络模型包括位置网络和速度网络;所述位置网络用于输出两组估计值中投影位置估计值的权重及投影位置估计值的偏差;所述速度网络用
于输出所述估计值中速度估计值的权重及速度估计值的偏差;
[0208]
根据投影位置估计值的偏差,对移动终端的两个投影位置估计值进行纠正,再对纠正后的估计值分配投影位置估计值的权重,得到模型输出的移动终端投影位置;
[0209]
根据速度估计的偏差,对移动终端的两个速度估计值进行纠正,再对纠正后的估计值分配速度估计值的权重,得到模型输出的移动终端速度。
[0210]
进一步的,所述位置网络和速度网络均包括权重子网络和偏置子网络,所述权重子网络和偏置子网络均为包括两个隐层的神经网络模型;
[0211]
所述权重子网络用于输出权重,所述偏置子网络用于输出偏差。
[0212]
进一步的,根据所述预测时刻的移动终端投影位置,实现波束预测,包括:
[0213]
根据所述预测时刻的移动终端投影位置,得到移动终端接收端的信道los的出发角,进而得到基站发射端和移动终端接收端的模拟预编码;
[0214]
根据所述预测时刻的移动终端投影位置和所述移动终端接收端的信道los的出发角,得到虚拟信道,根据所述虚拟信道得到基站发射端数字预编码;
[0215]
所述基站发射端模拟预编码和所述基站发射端数字预编码均用于供基站发射数据信号,所述移动终端接收端的模拟预编码用于供移动终端接收基站发射的数据信号。
[0216]
本发明能够极大地降低波束对齐和跟踪中的波束训练开销和指令下达时延,提升频谱效率,性能显著提高。
[0217]
实施例4:
[0218]
一种设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现以上任一所述的一种用于线性轨迹的智能波束预测方法。存储器可为各种类型的存储器,可为随机存储器、只读存储器、闪存等。处理器可为各种类型的处理器,例如,中央处理器、微处理器、数字信号处理器或图像处理器等。
[0219]
一种计算机可读存储介质,存储有计算机可执行指令,所述计算机可执行指令用于执行以上任一所述的一种用于线性轨迹的智能波束预测方法。存储介质包括:u盘、移动硬盘、rom、ram、磁碟或者光盘等各种可以存储程序代码的介质。
[0220]
实施例5:
[0221]
为了验证本发明波束预测方法的性能优势,以下给出一个实验过程。
[0222]
毫米波信道模型为3gpp tr 38.901 uma los。基站载频fc=30ghz,带宽b=80mhz,基站最大发射功率p
t,max
=30dbm,水平天线数为8,射频单元数为4,基站间距离200m。噪声功率谱密度为-174dbm/hz。移动终端有4个,每个移动终端有4根水平天线和1个射频单元。终端速度服从laplacian分布,均值256(km/h)2,方差18(km/h)2。bs和mt最小距离为11m。预测时间颗粒度为δt
p
=1.25ms,观测周期为1.25s,观测间隔δt=100ms,观测次数l=3。累计时间tc=12.5ms,残留载波比例1ppm。
[0223]
本实施例中,如图4所示,当mt远离bs时,测量的定位估计精度较高,而mt位于bs附近时,其精度较低。这一现象是由于,相对通信延迟包含bs与mt间的距离信息,但不能推断mt位于bs右侧或左侧。此外,但是,当doppler频率被噪声严重污染或速度分量很小时,估计性能无法得到改善。因此,如图4和图5所示,导频信号表示基于接收导频信号的方法,即只使用导频信号来得到移动终端投影位置和速度估计值,并以所述投影位置和速度估计值做波束预测;测量信号表示基于测量信号的方法,即只使用测量信号来得到移动终端投影位
置和速度估计值,并以所述投影位置和速度估计值做波束预测。在mt远离bs时基于测量信号的投影位置和速度估计都不准确。同时,当bs和mt距离变小时,基于接收导频信号的估计更加准确。这是因为路径损耗变小,snr提高。此外,mt的aod也容易在这个范围内被区分。当mt远离bs时,估计的准确度急剧下降。
[0224]
一般地,当mt远离bs时,基于测量信号的估计准确度高于基于接收导频信号的估计,当mt在bs附近时,基于接收导频信号的估计准确度高于基于测量信号的估计。本发明的估计方法在投影位置和速度估计上具有最高的准确度。仿真结果验证了所述方法的有效性。
[0225]
本实施例中,如图6所示,频谱效率(spectral efficiency,se)与投影位置的关系如图6所示。其中,作为基准对比方案,已知i-csi和s-csi的方法具有不可达se性能上界。本发明方法在se性能上优于仅基于测量信号或导频信号的方法。其中,基于测量信号的方法只使用测量信号来得到移动终端投影位置和速度估计值,并以所述投影位置和速度估计值做波束预测;基于接收导频信号的方法只使用导频信号来得到移动终端投影位置和速度估计值,并以所述投影位置和速度估计值做波束预测。此外,n
rf
个mt的平均和速率在表2(不同方法的平均和速率性能(bps/hz))中列出。
[0226][0227]
本实施例中,考虑mt特定的导频信号,现有技术中波束对齐/跟踪(beam alignment/tracking,ba/t)和本发明中波束预测的波束训练开销均随着mt数量线性增长。将开销成本比定义为开销占时频资源的比例。如表3所示,与ba/t算法相比,所述波束预测训练开销接近于零,当mt数大于4时,所述波束预测的有效和速率高于ba/t。此外,ba/t的指令下达延迟约为20ms,而所述波束预测延迟为0。仿真结果验证了所述波束预测方法的有效性,如表3(不同方法的开销比例和平均有效和速率)所示:
[0228][0229]
以上所述仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1