一种获取点云图的方法与流程
本申请涉及探测,特别涉及一种获取点云图的方法。
背景技术:
1、与传统摄像头相比,深度摄像头(又可称为深度相机或者3d摄像头)可检测出图像中每个点离摄像头的距离,即可检测出拍摄空间的景深距离,如此可更便于还原真实场景,实现场景建模等应用。典型的,深度摄像头可采用结构光、双目视觉或者光飞行时间法(time of flight,tof)三种方案。
2、利用tof技术成像的设备被称为tof相机(或tof摄像头),tof相机与普通机器视觉成像过程也有类似之处,都是由光源、光学部件、传感器(tof芯片)、控制电路以及处理电路等几部单元组成。这种技术跟3d激光传感器原理基本类似,只不过3d激光传感器是逐点扫描,而tof相机则是同时得到整幅图像的深度信息。
3、tof技术采用主动光探测方式,与一般光照需求不一样的是,tof照射单元的目的不是照明,而是利用入射光信号与反射光信号的变化来进行距离测量,因此,tof相机的测量结果受被测物体性质的影响很大,即受被测物体的反射率影响很大,因此在实际使用中,tof镜头得到的点云质量往往不是很好,尤其是一些低反射率的面,往往得不到实际反映物体特征的点云,鉴于这种情况,亟需一种方法实现较好的点云物体目标检测。
技术实现思路
1、本申请的目的在于,针对上述现有技术中的不足,提供一种获取点云图的方法,以解决现有的点云物体目标检测中点云图不理想的问题。
2、为实现上述目的,本申请实施例采用的技术方案如下:
3、第一方面,本申请实施例提供了一种获取点云图的方法,其特征在于,所述方法包括:
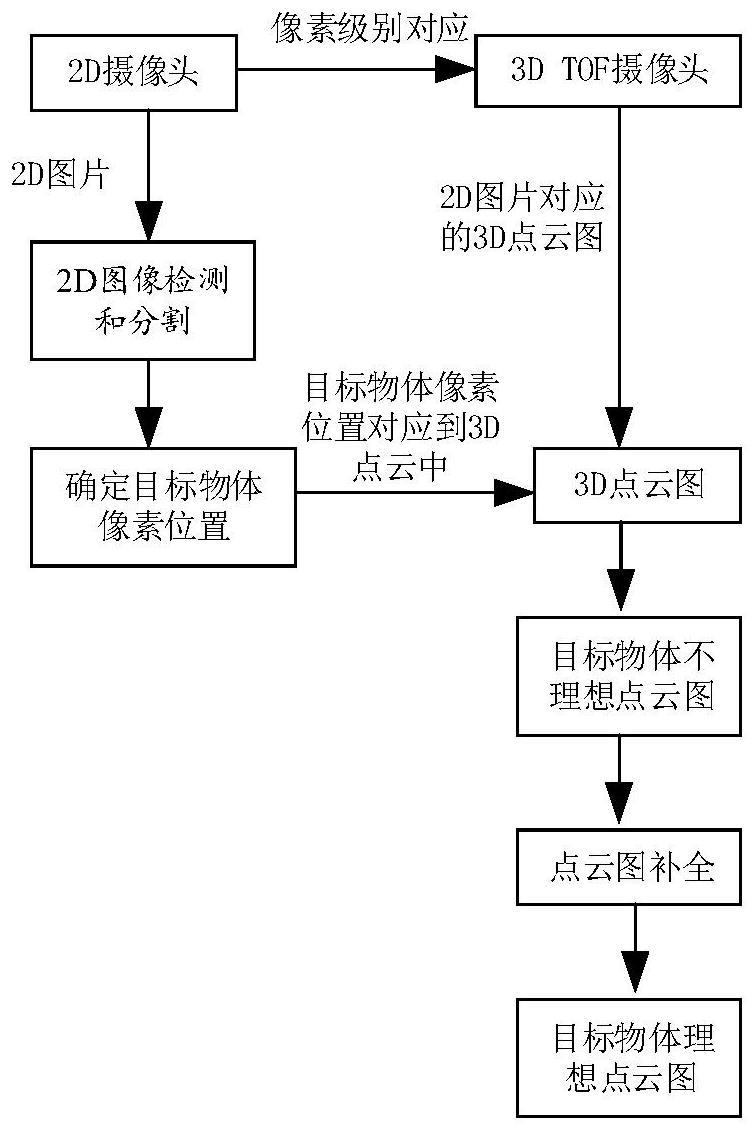
4、通过2d摄像头拍摄获得2d图像;
5、通过3d tof摄像图获得3d点云图;
6、根据所述2d图像确定目标像素位置;
7、将所述目标像素位置对应到所述3d点云图中,得到非理想点云图;
8、对所述非理想点云图进行补全,得到理想点云图。
9、可选的,所述2d摄像头与所述3d摄像头视场角一样;
10、可选的,所述2d摄像头与所述3d摄像头平行放置,间距为l;
11、可选的,将所述3d点云图尺寸变换到与所述2d图像尺寸大小相同;
12、可选的,所述3d点云图的划分网格与所述2d图像的划分网络大小相同;
13、可选的,通过对所述2d图像进行图像检测和分割确定所述目标像素的位置;
14、可选的,通过变分关联点云补全网络对所述非理想点云图进行补全;
15、可选的,所述2d摄像头获得的2d图像与所述3d摄像头拍摄的图像之间的水平偏差为l。
16、本申请的有益效果是:
17、一种获取点云图的方法,其特征在于,所述方法包括:
18、通过2d摄像头拍摄获得2d图像;
19、通过3d tof摄像图获得3d点云图;
20、根据所述2d图像确定目标像素位置;
21、将所述目标像素位置对应到所述3d点云图中,得到非理想点云图;
22、对所述非理想点云图进行补全,得到理想点云图;通过如此的方法可以解决现有的点云物体目标检测中点云图不理想的问题。
技术特征:
1.一种获取点云图的方法,其特征在于,所述方法包括:
2.如权利要求1所述的获取点云图的方法,其特征在于,所述2d摄像头与所述3d摄像头视场角一样。
3.如权利要求1所述的获取点云图的方法,其特征在于,所述2d摄像头与所述3d摄像头平行放置,间距为l。
4.如权利要求1所述的获取点云图的方法,其特征在于,将所述3d点云图尺寸变换到与所述2d图像尺寸大小相同。
5.如权利要求1所述的获取点云图的方法,其特征在于,所述3d点云图的划分网格与所述2d图像的划分网络大小相同。
6.如权利要求1所述的获取点云图的方法,其特征在于,通过对所述2d图像进行图像检测和分割确定所述目标像素的位置。
7.如权利要求1所述的获取点云图的方法,其特征在于,通过变分关联点云补全网络对所述非理想点云图进行补全。
8.如权利要求3所述的获取点云图的方法,其特征在于,所述2d摄像头获得的2d图像与所述3d摄像头拍摄的图像之间的水平偏差为l。
技术总结
一种获取点云图的方法,其特征在于,所述方法包括:通过2D摄像头拍摄获得2D图像;通过3D TOF摄像图获得3D点云图;根据所述2D图像确定目标像素位置;将所述目标像素位置对应到所述3D点云图中,得到非理想点云图;对所述非理想点云图进行补全,得到理想点云图;通过如此的方法可以解决现有的点云物体目标检测中点云图不理想的问题。
技术研发人员:雷述宇
受保护的技术使用者:宁波飞芯电子科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!