一种基于微光夜视技术的反无人机图像通信系统的制作方法
1.本发明涉及一种反无人机图像通信系统,尤其涉及一种基于微光夜视技术的反无人机图像通信系统。
背景技术:
2.无人驾驶航空系统,通常被称为无人机,已向公众提供商业用途。虽然无人机系统可能有许多安全的商业和娱乐用途,但如果操作不当,这些设备可能会对商业和通用航空、公共、私人和政府财产造成潜在危害。随着无人机的普及,无人机的无证飞行和随意飞行也越来越威胁到公共安全。如何解决无人机的“黑飞”问题成为研究热点。反无人机系统是检测无人机,反制无人机的系统。在反无人机系统中,图像识别是无人机识别的方法之一,而图像识别的关键在于图像特征的提取,使用显著对象作为图像内容表示。根据特征提取的方式不同,分为传统图像特征手动提取方法和神经网络自动提取特征两种图像识别方法,传统图像识别主要依靠手动提取图像中的颜色特征、形状特征、纹理特征等特征参数来对图像进行分类,但是由于传统图像识别方法本身的局限性,使得分类的精度不高。
3.夜视技术是研究在微弱的照度下,通过改善或扩展人们的视觉功能,以实现夜间隐蔽观察的一种技术。它采用光电子成像的方法来缓和和克服人眼在低照度下以及有限光谱响应下的限制,以开拓人眼的视觉。其中微光ccd技术是近年发展起来的一种微光摄像技术,微光ccd成像系统是在图像增强技术和ccd技术的基础上发展起来的一种固体摄像系统。微光电视在军事、民用、公安、空间技术等许多方面得到了广泛的应用,如军事上的地面、空中和海面上的电视侦察;战地或登陆指挥;电视跟踪和制导;战机和舰艇的导航以及通信和部队训练等。但是微光ccd电视系统由于其入射照度低和背景差,因而所获取的视频信息具有很低的信噪比,由此产生的输出图像没有足够的分辨力和对比度,并且有明显的图像噪声。随着微光ccd实时图像处理技术的发展,可以大大改善微光电视图像的质量,提高多目标识别和分辨率细节以及抗干扰的能力。
技术实现要素:
4.为了解决上述技术问题,本发明提出了一种基于微光夜视技术的反无人机图像通信系统,包括:定向单元,用于根据无人机发出的声波及射频波确定无人机的方向和距离;通信链路扫描单元,用于扫描与无人机相关联的控制链路,将所述控制链路与存储在通信链路扫描单元频率库中的无线电特征进行比较,对无人机进行分类,并将分类结果发送至干扰单元;干扰单元,用于参考通信链路扫描单元的分类结果生成并以一定时间间隔地发射第一扰动信号和第二扰动信号,分别干扰所述与无人机相关联的控制链路的上行链路信号和下行链路信号;跟踪单元,用于根据所述定向单元判断的无人机的方位而跟踪无人机;
微光摄像单元,用于在夜视模式下,根据所述定向单元确定的无人机的方向和距离,在跟踪单元的控制下,跟踪采集无人机的微光图像,并对所述微光图像编码和压缩后发送至视觉显示器;视觉显示器,对编码和压缩后的数据包进行解压缩以及解码,并同步显示。
5.进一步地,所述定向单元包括信号检测装置和处理器,当所述信号检测装置检测到在检测范围内的边界内飞行的无人机的声波或射频波信号时,将检测到所述声波或射频波信号以电子方式传递到所述处理器,以判断目标的方位。
6.进一步地,还包括调节单元,用于在所述干扰单元发送第一扰动信号和发送第二扰动信号之间提供时间间隔以允许所述信号检测装置在该时间间隔内继续检测信号。
7.进一步地,所述跟踪单元采用激光雷达传感器扫描获取无人机点云作为自动目标识别算法的输入,描获得无人机的三维距离像,无人机点云成像公式如下:;其中,(x
i
,y
i
,z
i
)表示扫描到的无人机点云坐标,(x0, y0, z0)表示激光雷达传感器坐标,l表示无人机与激光雷达传感器之间的距离,α、β、γ分别为俯仰扫描角、横向扫描角和偏航角。
8.进一步地,所述微光摄像单元包括光学镜头、微光图像增强器、cmos图像传感器、通信单元和微处理器,所述光学镜头采集被跟踪的无人机微弱光学信号,通过微光像增强器对所述微弱光学信号进行图像增强,所述cmos图像传感器将图像增强后的光学信号转换为电信号发送至微处理器,所述微处理器对接收到的图像信号进行图像增强算法处理后发送至所述通信单元,进行编码变换、欧式距离排序、存储并压缩成传输的数据包。
9.进一步地,所述图像增强算法处理包括:读取每一帧图像数据;通过高通滤波抑制低频来提取图像数据的高频细节成分,并将值大于1/4最大像素值的高频信息乘以增益值,将增益后的高频信息叠加至原图像。
10.进一步地,所述编码变换、欧式距离排序的过程如下:首先将原始图像分割成8
×
8子块,再分别对这些子块作离散余弦变换,离散余弦变换如下:;;fdct将8
×
8的离散信号变成64个dct系数,f(x,y)指的是图片坐标为[x,y]的像素值;图片f经过离散余弦变换后为f(u,v),f(u,v)指的是图片离散余弦后图片坐标为[u,v]的像素值;取经离散余弦变换后的信号矩阵左上角的设定大小部分为当前的帧信息;与离
散余弦变换后的信号矩阵的中间帧队列计算欧式距离,欧式距离计算公式为:;微处理器按照欧式距离大小进行排序、存储并压缩成数据包。
[0011]
进一步地,所述干扰单元,包括扰动信号生成装置和扰动信号发射装置,所述扰动信号发射装置具有选择性增益控制的波束成形天线,根据定向单元调整波束成形天线上的波束成形的量或增益的量,以准确地对目标上行链路信号和下行链路信号进行干扰。
[0012]
本发明通过定位、跟踪采集无人机的微光图像,并对微光图像进行图像增强处理增加了原图像的灰度级,从而使图像包含更多细节信息,通过对视频信号进行编码变换、欧式距离排序以及压缩后进行通信传输,实现了传输过程中的信号的快速和准确性。
附图说明
[0013]
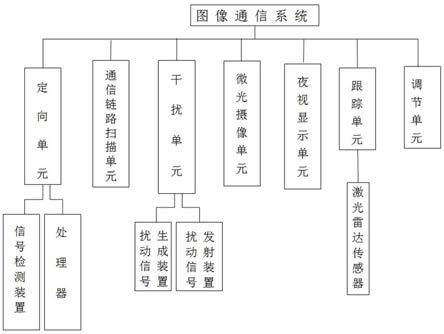
附图1为本发明的基于微光夜视技术的反无人机图像通信系统的结构示意图;附图2为本发明的微光摄像单元的具体结构示意图。
具体实施方式
[0014]
为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0015]
在本发明的具体实施例附图中,为了更好、更清楚的描述基于微光夜视技术的反无人机图像通信系统中的各元件的工作原理,表现所述装置中各部分的连接关系,只是明显区分了各元件之间的相对位置关系,并不能构成对元件或结构内的信号传输方向、连接顺序及各部分结构大小、尺寸、形状的限定。
[0016]
如图1所示为本发明的基于微光夜视技术的反无人机图像通信系统的结构示意图,图像通信系统包括定向单元、通信链路扫描单元、干扰单元、微光摄像单元、夜视显示单元、跟踪单元和调节单元。
[0017]
定向单元包括信号检测装置和处理器,信号检测装置包括声学传感器和射频接收器,用于检测无人机发出的声波及射频波,处理器用于根据信号检测装置的检测结果确定无人机的方向和距离。
[0018]
由于无人机周期性向控制源发射声波信号和射频信号,因此本系统中的检测装置可以对该声波信号和射频信号进行检测,定向单元启动后,信号检测装置周期性地检测声波信号和射频信号,当信号检测装置检测到在检测范围内飞行的无人机的声波或射频波信号时,接收声波或射频波信号,然后汇集信息并以电子方式传递到处理器,以估计目标的方位。
[0019]
通信链路扫描单元被配置为扫描与无人机相关联的无人机控制链路和视频链路,基于无人机控制链路和视频链路确定无人机的源方向;通信链路扫描单元将控制链路与存储在通信链路扫描单元频率库中的无线电特征进行比较,对目标无人机进行分类,并将分类结果发送至干扰单元,辅助干扰单元发送对应类型的扰动信号。
[0020]
干扰单元,包括扰动信号生成装置和扰动信号发射装置,扰动信号生成装置被配置为生成扰动信号,所述扰动信号参考通信链路扫描单元的分类结果生成;扰动信号发射装置被配置为发射所述扰动信号,优选地,向无人机的源方向发射扰动信号。扰动信号发射装置包括具有选择性增益控制的波束成形天线,将波束成形技术应用到无线电收发器的接收路径中的增益控制技术,以一定时间间隔地发射第一扰动信号和第二扰动信号,分别干扰上行链路信号和下行链路信号。
[0021]
优选地,扰动信号发射装置可根据定向单元调整波束成形天线上的波束成形的量,例如,宽度和方向性,或沿着波束成形方向的无线电天线增益的量,以准确地对目标上行链路信号和下行链路信号进行干扰,防止与更远的不相关的上行链路/下行链路信号的干扰。
[0022]
调节单元被配置为在扰动信号发射装置发送第一扰动信号和发送第二扰动信号之间提供时间间隔以允许信号检测装置在该时间间隔内继续检测信号。
[0023]
跟踪单元,被配置为根据定向单元判断的无人机的方位而跟踪无人机。具体地跟踪单元采用激光雷达传感器扫描获取无人机点云作为自动目标识别算法的输入,描获得无人机的三维距离像,无人机点云成像公式:;式中,(x
i
,y
i
,z
i
)表示扫描到的无人机点云坐标,(x0, y0, z0)表示激光雷达传感器坐标,l表示无人机与激光雷达传感器之间的距离,α、β、γ分别为俯仰扫描角、横向扫描角和偏航角。
[0024]
微光摄像单元用于在夜视模式下,根据定向单元确定的无人机的方向和距离,在跟踪单元的控制下,操作微光摄像单元跟踪采集微光图像。
[0025]
如图2所示为微光摄像单元的具体结构示意图,微光摄像单元包括光学镜头、与光学镜头相接的微光图像增强器、与微光图像增强器相接且能将光信号转换为电信号的cmos图像传感器和设置在光学镜头周侧的辅助光源,cmos图像传感器与微处理器相接,微处理器与通信单元电连接并进行数据传输。
[0026]
微光摄像单元实时采集被跟踪的无人机微弱图像模拟信号,且通过微光像增强器和cmos图像传感器对所采集的微弱图像模拟信号进行图像增强和a/d转换后送至微处理器。
[0027]
通信单元对接收到的由微处理器输出的视频信号依次进行编码变换、欧式距离排序、存储并压缩成适合无线网络传输的数据包,同时微处理器控制视觉显示器对接收到的视频信号进行同步显示。
[0028]
微光像增强器对所采集的微弱图像模拟信号进行图像增强,微光像增强器由光电阴极、微通道板、阳极和适配的电源组成, 其中光电阴极、微通道板和荧光屏构成微光像增强器的光学组件部分,由于微通道板各通道的增益,因此电子图像在微通道板中的传输中,相当于微通道板输入端上的电子图像增强后图像在输出端。与之适配的电源为微光像增强
器提供必要的电压,实现自动亮度控制和强光保护功能,保护光电阴极不受损坏。
[0029]
微处理器对输入的视频图像进行图像增强算法处理,具体包括如下处理步骤:(1)从cmos图像传感器中读取每一帧图像数据;(2)每一帧图像数据的细节部分往往是灰度级变化显著的地方,而它对应于图像频域中的高频部分,因此通过高通滤波抑制低频来提取图像的高频细节成分,并将值大于1/4最大像素值的高频信息乘以设定增益值,然后将增益后的高频信息叠加至原图像,增加原图像的灰度级,从而使图像包含更多细节信息。优选地,增益值大小设定为100。
[0030]
通信单元对接收到的由微处理器输出的视频信号进行编码变换、欧式距离排序的详细过程如下:首先将原始图像分割成一系列子块,再分别对这些子块作离散余弦变换。下面以将原始图像分割成8
×
8子块为例,进行离散余弦变换计算:;;fdct将8
×
8的离散信号变成64个dct系数,f(x,y)指的是图片坐标为[x,y]的像素值;图片f经过离散余弦变换后为f(u,v),f(u,v)指的是图片离散余弦后图片坐标为[u,v] 的像素值;取经dct变换后的信号矩阵左上角的设定大小部分为当前的帧信息;与dct变换后的信号矩阵的中间帧队列计算欧式距离,欧式距离计算公式为:;微处理器按照欧式距离大小进行排序、存储并压缩成适合无线网络传输的数据包,通信单元将数据包发送至视觉显示器,视觉显示器对数据包进行解压缩以及解码,得到可以显示的视频图像数据,进而对接收到的微光摄像单元采集到的图像信号进行同步显示。
[0031]
需要说明的是,对于前述的各方法实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明并不受所描述的动作顺序的限制,因为依据本发明,某些步骤可以采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,所涉及的动作和模块并不一定是本发明所必须的。
[0032]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1