车载传感器清洗装置及车载传感器清洗方法与流程
1.本发明涉及将车载传感器接收的信号(可见光、激光、红外线、毫米波段的电波等电磁波、声波等)所通过的检测面部利用清洗液来清洗的车载传感器清洗装置及车载传感器清洗方法。
背景技术:
2.以往,已知有搭载了以使车辆(本车辆)的驾驶员能够容易地监视该车辆的周边的状况的方式支援驾驶员的装置的车辆。例如,这样的车辆的一例将由搭载于车辆的相机传感器(即,车载传感器)取得的车辆的周边的图像显示于显示器。而且,这样的车辆的另一例将由雷达传感器及超声波传感器等车载传感器取得的周边监视支援信息(例如,表示其他车辆的接近的信息)显示于显示器。
3.专利文献1公开了定期地用清洗液清洗车载传感器的检测面部(即,定期地执行自动清洗)的车载传感器清洗装置(以下,称作“以往装置”)。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2019-123262号公报
技术实现要素:
7.在车载传感器是相机传感器的情况下,在执行自动清洗的期间,清洗液映入图像,从而车辆周边的图像变得不清晰。在车载传感器是相机传感器以外的传感器的情况下,在执行自动清洗的期间,因清洗车载传感器的检知部的清洗液而车载传感器的检测精度下降,从而经由车载传感器取得的周边监视支援信息有可能不准确。因此,在车辆位于驾驶员观察周边图像及周边监视支援信息的至少一个的频度(可能性)高的场所的情况下,要求尽量不执行车载传感器的自动清洗。
8.但是,以往装置定期地执行自动清洗。因而,以往装置在驾驶员观察周边图像及周边监视支援信息的至少一个的频度高的场所处执行自动清洗的可能性高。
9.本发明为了应对上述的课题而完成。即,本发明的目的之一在于,提供在车辆位于驾驶员观察经由车载传感器而取得的图像及信息的至少一个的可能性高的场所时能够使得难以执行车载传感器的自动清洗的车载传感器清洗装置及车载传感器清洗方法。以下,本发明的车载传感器清洗装置有时被称作“本发明清洗装置”。本发明的车载传感器清洗方法有时被称作“本发明清洗方法”。
10.本发明清洗装置应用于车辆(sv),该车辆具备:车载传感器(11、12),基于通过在所述车辆的外部露出的检测面部的电磁波或声波来取得所述车辆的周边的信息;及显示装置(20、30),显示基于所述车载传感器取得的信息而生成的图像或显示信息。
11.本发明清洗装置具备:
12.清洗单元(u1),构成为进行将所述车载传感器的所述检测面部利用清洗液来清洗
的清洗处理;
13.位置信息取得装置(14),取得表示所述车辆的位置的车辆位置信息;及
14.控制单元(10),构成为使用建立关联地保存有能够确定设定于地表上的多个区域各自的位置的区域位置信息和与在所述多个区域的各自中所述车辆的驾驶员目视确认所述显示装置的概率具有相关性的目视确认概率相关值的存储装置(60,102),取得基于对于如下区域的所述目视确认概率相关值而决定的自动清洗开始条件是否成立的判定的结果(步骤505~步骤530),且在所述判定的结果表示所述自动清洗开始条件成立的情况下(在步骤530中是“是”这一判定)控制所述清洗单元以进行所述清洗处理(步骤535),上述的区域是所述多个区域中的一个且包含由所述取得的车辆位置信息表示的所述车辆的特定位置(确定位置)。
15.本发明清洗装置在自动清洗开始条件是否成立的判定的结果表示所述自动清洗开始条件成立的情况下进行清洗处理。该自动清洗开始条件基于车辆所在的场所的目视确认概率相关值而决定。由此,本发明清洗装置能够降低在车辆位于车辆的驾驶员观察经由车载传感器而取得的图像及显示信息的至少一个的可能性高的场所时、车载传感器的自动清洗被执行的频度。
16.本发明清洗装置的一方案还具备搭载于所述车辆的所述存储装置(60)。
17.在本发明清洗装置的一方案中,所述控制单元构成为:基于所述取得的车辆位置信息而将对于包含所述车辆的特定位置的区域的所述目视确认概率相关值从所述存储装置取得(步骤505~步骤515),基于所述取得的目视确认概率相关值来决定所述自动清洗开始条件(步骤520),判定所述自动清洗开始条件是否成立,由此取得所述判定的结果(步骤530)。
18.根据上述一方案,自动清洗开始条件基于从搭载于车辆的存储装置取得的目视确认概率相关值而决定。由此,上述一方案能够使得在车辆位于驾驶员观察经由车载传感器而取得的图像及显示信息的至少一个的可能性高的场所时,难以执行车载传感器的自动清洗。
19.本发明清洗装置的一方案还具备无线通信装置(110),该无线通信装置搭载于所述车辆,能够与存在于所述车辆的外部且包括所述存储装置(102)的信息处理装置通信。
20.在本发明清洗装置的一方案中,所述控制单元构成为:通过使用所述无线通信装置与所述信息处理装置进行通信,基于所述取得的车辆位置信息而将对于包含所述车辆的特定位置的区域的所述目视确认概率相关值从所述存储装置取得,基于所述取得的目视确认概率相关值来决定所述自动清洗开始条件,判定所述自动清洗开始条件是否成立,由此取得所述判定的结果。
21.根据上述一方案,自动清洗开始条件基于从车外的存储装置使用无线通信装置取得的目视确认概率相关值而决定。由此,上述一方案能够使得在车辆位于驾驶员观察经由车载传感器而取得的图像及显示信息的至少一个的可能性高的场所时,难以执行车载传感器的自动清洗。
22.在本发明清洗装置的一方案中,
23.所述车载传感器是通过使用作为所述电磁波的光对所述车辆的周边进行拍摄来取得图像信息的相机传感器(11、12),所述控制单元构成为:基于所述图像信息来取得表示
所述车载传感器的所述检测面部的脏污的程度的脏污指标值,通过将所述脏污指标值和清洗阈值进行比较来判定所述自动清洗开始条件是否成立(步骤530),通过基于所述取得的目视确认概率相关值决定所述清洗阈值来决定所述自动清洗开始条件(步骤520),在所述脏污指标值比所述清洗阈值大的情况下取得表示所述自动清洗开始条件成立的所述判定的结果(在步骤530中是“是”这一判定)。
24.上述一方案通过将与脏污指标值比较的清洗阈值根据目视确认概率相关值而决定,能够根据目视确认概率来决定自动清洗开始条件。由此,上述一方案能够使得在车辆位于驾驶员观察经由车载传感器而取得的图像及显示信息的至少一个的可能性高的场所时,难以执行车载传感器的自动清洗。
25.在本发明清洗装置的一方案中,所述控制单元构成为:
26.以使得在所述取得的目视确认概率相关值是特定值的情况下与所述取得的目视确认概率相关值比所述特定值小的情况想比所述清洗阈值变大的方式变更所述清洗阈值,从而决定所述自动清洗开始条件(步骤520)。
27.上述一方案通过将与脏污指标值比较的清洗阈值如上述那样变更,能够使得目视确认概率相关值越大则使自动清洗开始条件越难以成立。由此,上述一方案能够使得在车辆位于驾驶员观察经由车载传感器而取得的图像及显示信息的至少一个的可能性高的场所时,难以执行车载传感器的自动清洗。
28.在本发明清洗装置的一方案中,
29.所述控制单元构成为通过以如下方式变更所述清洗阈值(步骤1015)来决定所述自动清洗开始条件:在所述取得的目视确认概率相关值处于第1目视确认概率相关值以下的第1范围的情况下,所述清洗阈值成为第1阈值,在所述取得的目视确认概率相关值处于比所述第1目视确认概率相关值大且比第2目视确认概率相关值小的第2范围且伴随于所述车辆的行驶的目视确认概率相关值的变化处于上升倾向的情况下(在步骤1010中为“是”这一判定),所述清洗阈值成为比所述第1阈值小的第2阈值。
30.上述一方案通过将与脏污指标值比较的清洗阈值如上述那样变更,能够降低清洗液的消耗量,并且能够使得在车辆到达目视确认概率相关值比较大的区域之前容易执行车载传感器的自动清洗。
31.本发明车载传感器清洗装置的一方案还具备取得用于判定所述车辆的驾驶员的状态的信息即驾驶员信息的驾驶员信息取得装置(13)。
32.在上述一方案中,所述控制单元构成为:在基于所述驾驶员信息而判定为所述车辆的驾驶员正在目视确认所述显示装置的期间,禁止所述清洗处理的执行(在步骤1205中为“否”这一判定,在步骤530中为“否”这一判定)。
33.上述一方案能够使得在驾驶员正在观察经由车载传感器而取得的图像及显示信息的至少一个的期间可靠地避免执行自动清洗。
34.本发明清洗装置的一方案还具备取得用于判定所述车辆的驾驶员的状态的信息即驾驶员信息的驾驶员信息取得装置。
35.在上述一方案中,所述控制单元构成为:基于所述驾驶员信息来进行是否目视确认了所述显示装置的目视确认判定(步骤310),确定包含取得了所述目视确认判定的结果的位置的所述多个区域中的一个区域(步骤410),基于所述目视确认判定的结果来计算所
述确定出的一个区域的所述目视确认概率相关值(步骤425~步骤445),将所述计算出的目视确认概率相关值与表示所述确定出的一个区域的所述区域位置信息建立关联并保存到所述存储装置(步骤450)。
36.在上述一方案中,判定在车辆实际行驶了的区域中驾驶员是否目视确认了显示装置,基于该判定结果而计算出的目视确认概率相关值向存储装置保存。因此,上述一方案能够将精度高的目视确认概率相关值保存到存储装置。
37.本发明清洗方法应用于车辆(sv),该车辆具备:
38.车载传感器(11、12),基于通过在所述车辆的外部露出的检测面部的电磁波或声波来取得所述车辆的周边的信息;
39.显示装置(20、40),显示基于所述车载传感器取得的信息而生成的图像或显示信息;
40.清洗单元(u1),构成为进行将所述车载传感器的所述检测面部利用清洗液来清洗的清洗处理;及
41.位置信息取得装置(14),取得表示所述车辆的位置的车辆位置信息。
42.本发明清洗方法包括:使用建立关联地保存有能够确定设定于地表上的多个区域各自的位置的区域位置信息和与在所述多个区域的各自中所述车辆的驾驶员目视确认所述显示装置的概率具有相关性的目视确认概率相关值的存储装置(60),取得对于如下区域的所述目视确认概率相关值的步骤(步骤515),上述的区域是所述多个区域中的一个且包含由所述取得的车辆位置信息表示的所述车辆的特定位置;基于所述取得的目视确认概率相关值来决定自动清洗开始条件的步骤(步骤520);取得所述决定的自动清洗开始条件是否成立的判定的结果的步骤(步骤530);及在所述判定的结果表示所述自动清洗开始条件成立的情况下(在步骤530中为“是”这一判定)控制所述清洗单元以进行所述清洗处理(步骤535)的步骤。
43.根据本发明清洗方法,在自动清洗开始条件是否成立的判定的结果表示所述自动清洗开始条件成立的情况下,进行清洗处理。该自动清洗开始条件基于车辆所在的场所的目视确认概率相关值而决定。由此,本发明清洗方法能够降低在车辆位于车辆的驾驶员观察经由车载传感器而取得的图像及显示信息的至少一个的可能性高的场所时、车载传感器的自动清洗被执行的频度。
44.本发明清洗方法的一方案包括:
45.取得用于判定所述车辆的驾驶员的状态的信息即驾驶员信息的步骤(步骤305、步骤310);
46.基于所述驾驶员信息来进行是否目视确认了所述显示装置的目视确认判定(步骤310),确定包含取得了所述目视确认判定的结果的位置的所述多个区域中的一个区域的步骤(步骤410);
47.基于所述目视确认判定的结果来计算所述确定的一个区域的所述目视确认概率相关值的步骤(步骤425~步骤445);及
48.将所述计算出的目视确认概率相关值与表示所述确定出的一个区域的所述区域位置信息建立关联并保存到所述存储装置的步骤(步骤450)。
49.根据上述一方案,判定在车辆实际行驶了的区域中驾驶员是否目视确认了显示装
置,基于其判定结果而计算出的目视确认概率相关值向存储装置保存。因此,上述一方案能够将精度高的目视确认概率相关值保存到存储装置。
50.在上述说明中,为了帮助本发明的理解,对与后述的各实施方式对应的发明的构成以写进括弧的方式添加了在该各实施方式中使用的名称和/或标号。但是,本发明的各构成要素不限定于由所述名称和/或标号规定的各实施方式。
附图说明
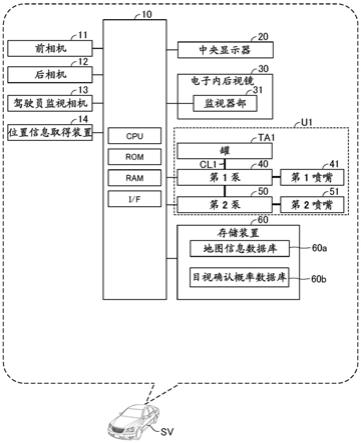
51.图1是包括实施方式的第1清洗装置的车载装置的概略构成图。
52.图2是道路的概略平面图。
53.图3是表示第1清洗装置~第3清洗装置的ecu的cpu执行的例程的流程图。
54.图4是表示第1清洗装置~第3清洗装置的ecu的cpu执行的例程的流程图。
55.图5是表示第1清洗装置的ecu的cpu执行的例程的流程图。
56.图6是用于说明第1清洗装置的工作的概要的图。
57.图7是表示第1清洗装置的变形例的ecu的cpu执行的例程的流程图。
58.图8是表示第1清洗装置的变形例的ecu的cpu执行的例程的流程图。
59.图9a是用于说明第2映射map2的图。
60.图9b是用于说明第3映射map3的图。
61.图10是表示第2清洗装置的ecu的cpu执行的例程的流程图。
62.图11是用于说明第2清洗装置的工作的概要的图。
63.图12是表示第3清洗装置的ecu的cpu执行的例程的流程图。
64.图13是用于说明第3清洗装置的工作的概要的图。
65.图14是车载传感器清洗系统的概略构成图。
66.标号说明
67.10
…
ecu,11
…
前相机,12
…
后相机,13
…
驾驶员监视相机,14
…
位置信息取得装置,20
…
中央显示器,30
…
电子内后视镜,31
…
监视器部,40
…
第1泵,41
…
第1喷嘴,50
…
第2泵,51
…
第2喷嘴,60
…
存储装置,60b
…
目视确认概率数据库,ta1
…
罐,u1
…
清洗单元。
具体实施方式
68.《《第1实施方式》》
69.《构成》
70.如图1所示,包括本发明的第1实施方式的车载传感器清洗装置(以下,称作“第1清洗装置”)的车载装置搭载于车辆sv。车载装置包括ecu10,前相机11、后相机12、驾驶员监视相机13、位置信息取得装置14、中央显示器20、电子内后视镜30、清洗单元u1及存储装置60。清洗单元u1包括罐ta1、第1泵40、第1喷嘴41、第2泵50及第2喷嘴51。第1清洗装置包括ecu10、驾驶员监视相机13、位置信息取得装置14、清洗单元u1及存储装置60等。
71.ecu10是具备微型计算机作为主要部分的控制单元(electronic control unit:电子控制单元),也被称作控制器。微型计算机包括cpu、rom、ram及接口(i/f)等。cpu通过执行保存于rom的指令(程序、例程)而实现各种功能。此外,ecu10也可以由多个ecu构成。
72.ecu10连接于前相机11、后相机12、驾驶员监视相机13及位置信息取得装置14。以
下,前相机11及后相机12的各自在无需互相区分它们的情况下被称作“相机传感器(或周边相机装置)”。
73.前相机11安装于车辆sv的前端部的中央。前相机11是车载传感器的一个,具备在车辆sv的外部露出的检测面部。前相机11具备受光元件。来自与前相机11的拍摄范围对应的车辆sv的前方的区域的可见光被向该受光元件引导。前相机11利用该受光元件来取得表示车辆sv的前方的区域的图像信息(前方图像数据)。前相机11将取得的图像信息向ecu10发送。ecu10基于从前相机11接收到的图像信息来生成包括与其拍摄范围对应的图像的前方周边图像。前方周边图像作为支援驾驶员对车辆sv的前方区域的监视的图像发挥功能。
74.后相机12安装于车辆sv的后端部的中央。后相机12是车载传感器的一个,具备在车辆sv的外部露出的检测面部。后相机12具备受光元件。来自与后相机12的拍摄范围对应的车辆sv的后方的区域的可见光被向该受光元件引导。后相机12利用该受光元件来取得表示车辆sv的后方的区域的图像信息(后方图像数据)。后相机12将取得的图像信息向ecu10发送。ecu10基于从后相机12接收到的图像信息来生成包括与其拍摄范围对应的图像的后方周边图像。后方周边图像作为支援驾驶员对车辆sv的后方区域的监视的图像发挥功能。此外,以下,前方周边图像及后方周边图像的各自在无需互相区分它们的情况下被称作“周边图像”。
75.驾驶员监视相机13安装于能够拍摄就座于车辆sv的驾驶席的驾驶员的脸部的位置。驾驶员监视相机13通过拍摄存在于其拍摄范围内的驾驶员的脸部而生成驾驶员图像,将生成的驾驶员图像向ecu10发送。ecu10基于从驾驶员监视相机13接收到的驾驶员图像来取得用于判定驾驶员的状态的驾驶员信息(例如,表示驾驶员的视线方向的信息)。驾驶员监视相机13为了方便而也被称作“驾驶员信息取得装置”。
76.位置信息取得装置14具备gnss(global navigation satellite system:全球导航卫星系统)接收机。gnss接收机接收用于检测车辆sv的当前时刻的位置(当前位置)的“来自构成gnss的人工卫星的信号(gnss信号)”。位置信息取得装置14基于gnss信号来求出表示车辆sv的当前位置的位置信息。此外,位置例如由纬度及经度表示。位置信息取得装置14将求出的位置信息向ecu10发送。
77.ecu10还连接于中央显示器20、电子内后视镜30、第1泵40、第2泵50及存储装置60。
78.中央显示器20是显示图像的触摸面板式的显示器。中央显示器20设置于车辆sv的车室内的未图示的仪表盘的车宽方向的中央附近。ecu10将前方周边图像和/或后方周边图像显示于中央显示器20。
79.电子内后视镜30包括显示图像的监视器部31(内后视镜显示器)。监视器部31配设于能够由驾驶员目视确认的位置(例如,以往的内后视镜的配设位置即前风窗玻璃的车室内侧的中央部上方位置)。ecu10将后方周边图像显示于电子内后视镜30的监视器部31。
80.第1泵40经由液管cl1而与罐ta1连通。罐ta1是积存清洗液的容器。第1泵40经由液管cl1而与第1喷嘴41连通。第1喷嘴41配设于能够朝向前相机11的检测面部喷射清洗液的位置。
81.第1泵40由ecu10控制其驱动状态。若由ecu10驱动第1泵40,则第1泵40从罐ta1经由液管cl1而取入清洗液,将该清洗液经由液管cl1而向第1喷嘴41供给。第1喷嘴41将从罐ta1供给的清洗液朝向前相机11的检测面部喷射。因此,ecu10通过驱动第1泵40,能够清洗
前相机11的检测面部。
82.第2泵50经由液管cl1而与罐ta1连通。而且,第2泵50经由液管cl1而与第2喷嘴51连通。第2喷嘴51配设于能够朝向后相机12的检测面部喷射清洗液的位置。
83.第2泵50由ecu10控制其驱动状态。若由ecu10驱动第2泵50,则第2泵50从罐ta1经由液管cl1而取入清洗液,将该清洗液经由液管cl1而向第2喷嘴51供给。第2喷嘴51将从罐ta1供给的清洗液朝向后相机12的检测面部喷射。因此,ecu10通过驱动第2泵50,能够清洗后相机12的检测面部。
84.存储装置60是能够实现信息的读取的非易失性的存储装置(在本例中是硬盘)。ecu10能够将信息保存到存储装置60,而且,能够将保存于存储装置60的信息读出。存储装置60具有地图信息数据库60a及目视确认概率数据库60b。
85.在地图信息数据库60a中保存有地图信息。地图信息除了确定道路的位置信息(每个车道的位置信息)及道路形状的信息之外,还包括道路宽度的信息、停车场、交差路口、分支路口及信号机(交通信号灯)等的位置信息等。
86.在目视确认概率数据库60b中保存有确定“后述的多个区域arj”各自的位置的区域位置信息和与对于区域arj的区域位置信息分别建立了关联的“目视确认概率prj、确认累积次数ncj及判定累积次数ndj”。
87.如图2所示,区域位置信息是用于确定(示出)在基于地图信息将车辆sv能够行驶的道路ro1及停车场(未图示)等以多个区域arj进行了区划的情况下的各区域arj的位置的位置信息。区域arj具有预定的大小及形状(在本例中是矩形)。确定区域arj的区域位置信息例如是将预定的大小的矩形的4个顶点的位置(parj1,parj2,parj3,parj4)利用“纬度及经度”来表示的“4个位置数据”的集合。
88.目视确认概率prj表示在某区域arj中车辆sv的驾驶员目视确认(目视)中央显示器20及电子内后视镜30的任意一个的概率(以下,也称作“目视确认概率”)。此外,目视确认概率prj也可以是与目视确认概率具有相关性的值,是目视确认概率越大则越大的目视确认概率相关值。而且,中央显示器20及电子内后视镜30的各自在无需互相区分它们的情况下被称作“显示器”。显示器为了方便而也被称作“显示装置”。
89.确认累积次数ncj表示做出了在车辆sv通过“某区域arj”的情况下车辆sv的驾驶员目视确认了显示器这一判定的次数的累积值(以下,也称作“累积次数”)。判定累积次数ndj是做出了车辆sv通过了“某区域arj”这一判定的次数的累积值。换言之,判定累积次数ndj是进行了在“某区域arj”中驾驶员是否目视确认了显示器的判定的次数的累积值。此外,确认累积次数ncj及判定累积次数ndj各自的初始值被设定为“0”。目视确认概率prj通过将确认累积次数ncj除以判定累积次数ndj来算出(即,prj=ncj/ndj)。
90.《清洗处理的概要》
91.ecu10在判定为前相机11的检测面部脏污了的情况下,执行自动地清洗该检测面部的自动清洗处理。同样,ecu10在判定为后相机12的检测面部脏污了的情况下,执行自动地清洗该检测面部的自动清洗处理。
92.具体而言,ecu10取得(检测)前相机11及后相机12的检测面部各自的“表示脏污状况的程度的指标值(以下,也简称作“脏污指标值”)”。ecu10将前相机11的脏污指标值基于前方周边图像而如以下叙述那样取得,将后相机12的脏污指标值基于后方周边图像而如以
下叙述那样取得。
93.前相机11的脏污指标值是“前方周边图像中的脏污的区域的面积相对于前方周边图像的整体的面积的比(百分率)”。
94.前相机11的脏污指标值
95.=100
·
(前方周边图像中的脏污的区域的面积)/(前方周边图像的总面积)
96.此外,前方周边图像中的脏污的区域是在预定的时间内辉度的变化为阈值以下的区域(即,在时间上连续的多个前方周边图像中辉度实质上不变化的区域)。
97.如以下的式子所示,后相机12的脏污指标值是“后方周边图像中的脏污的区域的面积相对于后方周边图像的整体的面积的比(百分率)”。
98.后相机12的脏污指标值
99.=100
·
(后方周边图像中的脏污的区域的面积)/(后方周边图像的总面积)
100.此外,后方周边图像中的脏污的区域是在预定的时间内辉度的变化为阈值以下的区域(即,在时间上连续的多个后方周边图像中辉度实质上不变化的区域)。
101.从以上明显可知,显示于显示器的图像中的脏污的部分所占的比例越大,则“脏污指标值”越大。
102.ecu10监视对于前相机11的自动清洗开始条件(以下,也简称作“fr清洗开始条件”)是否成立。fr清洗开始条件在前相机11的脏污指标值变得比清洗阈值thfr大时成立。ecu10若判定为fr清洗开始条件成立,则通过将第1泵40驱动预定的时间(第1时间),从第1喷嘴41喷射预定量的清洗液,清洗(自动清洗)前相机11的检测面部。
103.同样,ecu10监视对于后相机12的自动清洗开始条件(以下,也简称作“rr清洗开始条件”)是否成立。rr清洗开始条件在后相机12的脏污指标值变得比清洗阈值thrr大时成立。ecu10若判定为rr清洗开始条件成立,则通过将第2泵50驱动预定的时间(第2时间),从第2喷嘴51喷射预定量的清洗液,清洗(自动清洗)后相机12的检测面部。
104.此外,清洗阈值thfr及清洗阈值thrr在本例中互相相同,以下称作“清洗阈值th”。而且,fr清洗开始条件及rr清洗开始条件分别简称作清洗开始条件。不过,清洗阈值thfr及清洗阈值thrr也可以互相不同。第1时间及第2时间可以互相相同,也可以互相不同。
105.《工作的概要》
106.在进行前相机11的检测面部的自动清洗的期间,清洗液向前相机11的检测面部喷射,因此前方周边图像变得不清晰。在该情况下,驾驶员难以通过目视确认前方周边图像来监视车辆sv的前方。同样,在进行后相机12的检测面部的自动清洗的期间,清洗液向后相机12的检测面部喷射,因此后方周边图像变得不清晰。在该情况下,驾驶员难以通过目视确认后方周边图像来监视车辆sv的后方。
107.由此,前相机11及后相机12的自动清洗优选在车辆sv存在于驾驶员通过目视确认显示器来监视车辆sv的周边(前方和/或后方)的可能性或必要性低的区域arj的期间中进行。
108.可以说,区域arj的目视确认概率prj越小,则“在车辆sv位于区域arj的情况下驾驶员通过目视确认显示器(即,周边图像)来监视周边的状况的可能性”越低。换言之,可以说,区域arj的目视确认概率prj越大,则“在车辆sv位于区域arj的情况下驾驶员通过目视确认显示器(即,周边图像)来监视周边的状况的可能性”越高。
109.于是,第1清洗装置以车辆sv所在的区域arj的目视确认概率prj越小则清洗阈值th越小的方式设定清洗阈值th。换言之,第1清洗装置以车辆sv所在的区域arj的目视确认概率prj越大则清洗阈值th越大的方式设定清洗阈值th。
110.由此,车辆sv所在的区域arj的目视确认概率prj越小,则清洗开始条件越容易成立(也就是说,清洗开始条件成立时的脏污指标值越小)。因此,在车辆sv位于驾驶员观察显示于显示器的周边图像的可能性低的场所时进行自动清洗的可能性变高。
111.相对于此,车辆sv所在的区域arj的目视确认概率prj越大,则清洗开始条件越难以成立(也就是说,清洗开始条件成立时的脏污指标值越大)。因此,在车辆sv位于驾驶员观察显示于显示器的周边图像的可能性高的场所时不进行自动清洗的可能性变高。
112.《具体工作》
113.ecu10的cpu(以下,简称作“cpu”)将在图3~图5中由流程图表示的例程的各自每当经过预定时间时执行。
114.因此,若成为预定的定时(timing),则cpu从图3的步骤300开始处理而进入步骤305,从驾驶员监视相机13取得驾驶员图像,并且将取得了驾驶员图像的时间点的车辆sv的位置信息从位置信息取得装置14取得。
115.接着,cpu进入步骤310,基于驾驶员图像来取得驾驶员信息(包括表示驾驶员的视线方向的信息)。并且,cpu基于驾驶员的视线方向来判定驾驶员是否正在观察(正在目视、正在目视确认)显示器。更具体地说,cpu判定驾驶员的视线是否朝着“中央显示器20及电子内后视镜30”的任意一个。cpu在驾驶员的视线朝着中央显示器20及电子内后视镜30的任意一个的情况下,判定为驾驶员正在观察显示器。
116.在驾驶员正在观察显示器的情况下,cpu在步骤310中判定为“是”而进入步骤315,将确认标志xf的值设定为“1”。确认标志xf在其值是“1”的情况下,表示驾驶员正在观察显示器。确认标志xf在其值是“0”的情况下,表示驾驶员不是正在观察显示器。确认标志xf的值在车辆sv的未图示的点火钥匙开关从断开位置被向接通位置变更时由cpu执行的初始化例程中被设定为“0”。而且,如后所述,确认标志xf的值在车辆sv的位置从区域arj-1向与该区域相邻的区域arj变化时被设定为“0”(参照图4的步骤435)。之后,cpu进入步骤320。
117.相对于此,在当前时间点下驾驶员不是正在观察显示器的情况下,cpu在步骤310中判定为“否”,直接进入步骤320。
118.cpu在步骤320中将当前时间点的确认标志xf的值和在步骤305中取得的位置信息建立关联并向ram保存,进入步骤395而一度结束本例程。
119.cpu接在图3的处理之后,从图4的步骤400开始处理,依次执行以下叙述的“步骤405及步骤410的处理”后,进入步骤415。
120.步骤405:cpu读出在步骤320中向ram保存的“位置信息及确认标志xf的值”。
121.步骤410:cpu通过搜索目视确认概率数据库60b来确定包含在步骤405中取得的位置信息所表示的位置(即,是当前时间点的车辆sv的位置,是取得了驾驶员图像的时间点的车辆sv的位置)的区域arj。
122.在步骤415中,cpu判定在步骤410中确定出的当前时间点的区域arj是否与在预定时间前执行了本例程的时间点下的区域arj(以下,称作“上次区域arj-1”)不同。换言之,cpu判定车辆sv是否进入到新的区域arj。
123.在当前时间点的区域arj与上次区域arj-1相同的情况下,cpu在步骤415中判定为“否”而直接进入步骤420,将当前时间点的区域arj作为上次区域arj-1而向ram保存。之后,cpu进入步骤495,一度结束本例程。
124.在车辆sv刚进入到新的区域arj后cpu开始了本例程的处理的情况下,cpu在接在步骤405及步骤410之后的步骤415中判定为“是”,进入步骤425。在步骤425中,cpu判定确认标志xf的值是否是“1”。
125.在确认标志xf的值是“1”的情况下,cpu在步骤425中判定为“是”,依次执行以下叙述的“步骤430及步骤435的处理”后,进入步骤440。
126.步骤430:cpu将上次区域arj-1的确认累积次数ncj-1增加“1”,并且将上次区域arj-1的判定累积次数ndj-1增加“1”。
127.步骤435:cpu将确认标志xf的值恢复为“0”。
128.相对于此,在cpu进入到步骤425的时间点下确认标志xf的值是“0”的情况下,cpu在步骤425中判定为“否”而进入步骤445。cpu在步骤445中将上次区域arj-1的判定累积次数ndj-1增加“1”。不过,cpu在步骤445中不使上次区域arj-1的确认累积次数ncj-1变化。之后,cpu进入步骤440。
129.cpu在步骤440中,通过对“将确认累积次数ncj-1除以判定累积次数ndj-1而得到的值(=((ncj-1)/(ndj-1))”乘以100来求出上次区域arj-1中的目视确认概率prj-1(%)。接着,cpu进入步骤450,将目视确认概率prj-1与上次区域arj-1建立关联并向目视确认概率数据库60b保存。换言之,在目视确认概率数据库60b中,将与区域arj-1对应地保存的目视确认概率设定为在步骤440中求出的目视确认概率prj-1而更新(制作)目视确认概率数据库60b。之后,cpu执行步骤420中的处理,进入步骤495而一度结束本例程。
130.若成为预定的定时,则cpu从图5的步骤500开始处理(用于执行自动清洗的处理),依次执行以下叙述的“步骤505~步骤525的处理”后,进入步骤530。
131.步骤505:cpu从位置信息取得装置14取得当前时间点的车辆sv的位置信息。
132.步骤510:cpu通过搜索目视确认概率数据库60b来确定包含在步骤505中取得的位置信息所表示的“当前时间点的车辆sv的位置”的区域(车辆sv正在行驶的区域)arj。
133.步骤515:cpu从目视确认概率数据库60b取得(读出)确定出的区域arj的目视确认概率prj。
134.步骤520:cpu通过向作为保存于rom的查找表的第1映射map1(参照图5)应用在步骤515中取得的目视确认概率prj来设定清洗阈值th。根据第1映射map1,清洗阈值th以目视确认概率prj越大则成为越大的值的方式被设定。换言之,根据第1映射map1,清洗阈值th以在目视确认概率prj是特定的值prs时与目视确认概率prj是比该特定的值prs小的值的情况相比成为大的值的方式被设定。
135.步骤525:cpu确定在当前时间点下自动清洗不为执行中的相机传感器。更具体地说,cpu确定与第1泵40及第2泵50中的在当前时间点下未被驱动的泵对应的相机传感器。
136.cpu当进入步骤530后,判定确定出的相机传感器的脏污指标值是否比清洗阈值th大。在确定出的相机传感器是前相机11及后相机12双方的情况下,cpu判定前相机11的脏污指标值是否比清洗阈值th大,并且判定后相机12脏污指标值是否比清洗阈值th大。此外,cpu每当经过预定时间时执行未图示的例程,算出前相机11及后相机12各自的脏污指标值。
不过,cpu在第1泵40的驱动中(即,前相机11的清洗中)中止前相机11的脏污指标值的算出,在第2泵50的驱动中(即,后相机12的清洗中)中止后相机12的脏污指标值的算出。
137.在确定出的相机传感器中存在至少一个其脏污指标值比清洗阈值th大的相机传感器的情况下,cpu在步骤530中判定为“是”而进入步骤535。cpu在步骤535中,进行使与判定为其脏污指标值比清洗阈值th大的相机传感器对应的泵(第1泵40和/或第2泵50)驱动预定时间的处理。即,cpu进行判定为其脏污指标值比清洗阈值th大的相机传感器的检测面部的清洗(自动清洗)。之后,cpu进入步骤595,一度结束本例程。
138.相对于此,在确定出的相机传感器的全部的脏污指标值为清洗阈值th以下的情况下,cpu在步骤530中判定为“否”而进入步骤595,一度结束本例程。
139.使用图6所示的例子来对这样构成的第1清洗装置的工作的例子进行说明。在该例子中,对于地点p0与地点p1之间的区间(直线区间)中包含的区域arj的各自的目视确认概率prj是10%。由此,在车辆sv正在地点p0与地点p1之间的区间中行驶的情况下,清洗阈值th被设定为与目视确认概率=10%对应的值即3%。
140.而且,在该例子中,在车辆sv正在地点p1与地点p2之间的区间(交叉路口近前区间)中行驶的情况下,越接近地点p2则目视确认概率prj越逐渐增大。由此,清洗阈值th从3%朝向90%上升。
141.除此之外,在该例子中,对于属于地点p2与地点p3之间的区间(交叉路口区间)的区域arj的各自的目视确认概率prj是100%。由此,在车辆sv正在地点p2与地点p3之间的区间中行驶的情况下,清洗阈值th维持为90%。
142.由此,从该例子也能够理解到:车辆sv越接近包括目视确认概率prj高的区域arj的交叉路口,则清洗阈值th越上升,因此能够使相机传感器的检测面部被自动清洗的可能性下降。
143.如以上说明那样,根据第1清洗装置,在车辆sv正在目视确认概率prj低的区域arj中行驶的情况下进行自动清洗的可能性高。相反,根据第1清洗装置,在车辆sv正在目视确认概率prj高的区域arj中行驶的情况下进行自动清洗的可能性低。根据以上,在车辆sv位于驾驶员要通过目视确认显示于显示器的周边图像来进行车辆sv的周围的确认的概率高的区域arj的情况下,难以进行自动清洗,因此能够将清晰的周边图像显示于显示器。
144.《《第1实施方式的变形例》》
145.该变形例仅在每当经过预定时间时实施判定累积次数ndj、确认累积次数ncj及目视确认概率prj的更新这一点上与第1实施方式不同。更具体地说,该变形例的cpu为了更新它们而执行在“取代图3的图7”及“取代图4的图8”中由流程图表示的例程。
146.若成为预定的定时,则cpu从图7的步骤700开始处理。图7所示的“步骤705、步骤710、步骤715及步骤720”是进行与图3所示的“步骤305、步骤310、步骤315及步骤320”的处理分别相同的处理的步骤。cpu在步骤710中判定为“否”的情况下(即,在判定为驾驶员不是正在观察显示器的情况下),进入步骤725,将确认标志xf的值设定为“0”。之后,cpu进入步骤720。
147.cpu接在图7的处理之后,从图8的步骤800开始处理,依次执行“与步骤405相同的步骤805”及“与步骤410相同的步骤810”的处理后,进入步骤825。在步骤825中,cpu判定确认标志xf的值是否是“1”。
148.在确认标志xf的值是“1”的情况下,cpu在步骤825中判定为“是”而进入步骤830,将在步骤810中确定出的当前时间点的区域arj的确认累积次数ncj增加“1”,并且将该区域arj的判定累积次数ndj增加“1”。之后,cpu进入步骤840。
149.相对于此,在cpu进入到步骤825的时间点下确认标志xf的值是“0”的情况下,cpu在步骤825中判定为“否”而进入步骤845。cpu在步骤845中将在步骤810中确定出的当前时间点的区域arj的判定累积次数ndj增加“1”。不过,cpu在步骤845中不使区域arj的确认累积次数ncj变化。之后,cpu进入步骤840。
150.cpu在步骤840中,通过对“将确认累积次数ncj除以判定累积次数ndj而得到的值(=ncj/ndj)”乘以100来求出当前时间点的区域arj中的目视确认概率prj(%)。接着,cpu进入步骤850,将目视确认概率prj与区域arj建立关联并向目视确认概率数据库60b保存。换言之,cpu在目视确认概率数据库60b中,将与区域arj对应地保存的目视确认概率设定为在步骤840中求出的目视确认概率prj而更新(制作)目视确认概率数据库60b。之后,cpu进入步骤895而一度结束本例程。
151.如以上说明那样,在该变形例中,不是在车辆sv进入到新的区域arj的时间点,而是每当进行驾驶员是否正在观察显示器的判定(目视确认判定)的时间点,更新确认累积次数ncj、判定累积次数ndj及目视确认概率prj。也就是说,每当经过预定时间时更新目视确认概率数据库60b。由此,也能够合适地更新某区域arj的目视确认概率prj。
152.《《第2实施方式》》
153.本发明的第2实施方式的车载传感器清洗装置(以下,称作“第2清洗装置”)仅在以下的点上与第1清洗装置不同。
154.·
在ecu10的rom中,取代第1映射map1而保存有图9a所示的查找表即第2映射map2及图9b所示的查找表即第3映射map3。
155.·
ecu10在伴随于车辆sv的行驶(即,随着区域arj变化)而目视确认概率prj处于上升的倾向的情况下使用第2映射map2来求出清洗阈值th,在目视确认概率prj不处于上升的倾向的情况下使用第3映射map3来求出清洗阈值th。
156.以下,以该不同点为中心进行说明。
157.《具体工作》
158.第2实施方式的ecu10的cpu执行图3及图4所示的例程。而且,cpu每当经过预定时间时执行在取代图5的图10中由流程图表示的例程。此外,图3及图4的例程已经进行了说明,因此它们的说明省略。而且,关于图10所示的步骤中的与图5所示的“关于处理内容已说明的步骤”相同的步骤,省略其说明。
159.cpu从步骤1000开始处理,执行步骤505~步骤515的处理。接着,cpu进入步骤1005,取得表示目视确认概率prj的变化的倾向的参数(以下,称作“变化倾向参数”)。
160.更具体地说,cpu通过执行未图示的例程,每当车辆sv正在行驶的区域从上次区域arj-1向新的区域arj变化时,按照以下的式子来计算目视确认概率的变化量dpj。
161.dpj=(目视确认概率prj)-(目视确认概率prj-1)
162.在该式子中,目视确认概率prj是在目视确认概率数据库60b中对于新的区域arj保存的目视确认概率prj。而且,目视确认概率prj-1是在目视确认概率数据库60b中对于上次区域arj-1保存的目视确认概率prj-1。cpu将变化量dpj作为本次的变化量dp(n)而向ram
保存。
163.除此之外,在步骤1005中,cpu还将1次前的变化量dp(n-1)及2次前的变化量dp(n-2)从ram读出。1次前的变化量dp(n-1)是区域从arj-2向arj-1变化时的目视确认概率的变化量。2次前的变化量dp(n-2)是区域从arj-3向arj-2变化时的目视确认概率的变化量。
164.然后,cpu取得这些变化量dp(n)~dp(n-2)的平均值作为变化倾向参数k。此外,为了取得变化倾向参数k而使用的变化量dpj的个数也可以是一个,但优选是2个以上的预定个数。
165.接着,cpu进入步骤1010,通过判定变化倾向参数k是否为正的预定值kth以上来判定是否伴随于车辆sv的行驶而目视确认概率prj处于上升的倾向。
166.在目视确认概率prj处于上升倾向的情况下(在k为kth以上的情况下),cpu在步骤1010中判定为“是”而进入步骤1015,通过将在步骤515中取得的目视确认概率prj向图9a所示的第2映射map2(参照实线a1)应用来决定清洗阈值th。
167.根据第2映射map2,在目视确认概率prj为0以上且为第1概率pr1以下的情况下(即,在目视确认概率prj处于第1概率范围rp1内的情况下),清洗阈值th被设定为恒定的第1阈值th1。第1概率pr1优选从20%以上且35%以下的范围选择,在本例中是35%。第1阈值th1从清洗液的消耗量的降低的观点来看,例如优选为10以上%且50%以下,在本例中是40%。
168.而且,根据第2映射map2,在目视确认概率prj比第1概率pr1大且比第2概率pr2小的情况下(即,在目视确认概率prj处于第2概率范围rp2内的情况下),清洗阈值th被设定为恒定的第2阈值th2。第2概率pr2比第1概率pr1大,且优选从25%以上且50%以下的范围选择。在本例中,第2概率pr2是50%。第2阈值th2被设定为比第1阈值th1小的值,在本例中是3%。
169.除此之外,根据第2映射map2,在目视确认概率prj为第2概率pr2以上且为100%以下的情况下(即,在目视确认概率prj处于第3概率范围rp3内的情况下),清洗阈值th是比第1阈值th1大且第3阈值th3以下的范围内的值,且以目视确认概率prj越大则清洗阈值th越大的方式设定。此外,第3阈值th3优选从80%以上且95%以下的范围选择。在本例中,第3阈值th3是90%。
170.如从以上所理解那样,在目视确认概率prj处于第2概率范围rp2内的情况下,在目视确认概率prj处于上升倾向时,与不处于上升倾向时相比,清洗阈值th被设定为相对小的值(第2阈值th2)。由此,在该情况下,容易执行自动清洗处理。
171.在步骤1015的处理之后,cpu执行前述的步骤525~步骤535中的适当的处理后,进入步骤1095而一度结束本例程。
172.相对于此,在目视确认概率prj不处于上升倾向的情况下(在k小于kth的情况下),cpu在步骤1010中判定为“否”而进入步骤1020,通过将在步骤515中取得的目视确认概率prj向图9b所示的第3映射map3(参照实线b1)应用来决定清洗阈值th。
173.第3映射map3仅在目视确认概率prj处于第2概率范围rp2内的情况下清洗阈值th被设定为第1阈值th1这一点上与第2映射map2不同。因此,即使目视确认概率prj处于第2概率范围rp2内,在目视确认概率prj不处于上升倾向的情况下,清洗阈值th也不被设定为相对小的第2阈值th2,而被设定为第1阈值th1。
174.在步骤1020的处理之后,cpu执行前述的步骤525~步骤535中的适当的处理后,进入步骤1095而一度结束本例程。
175.使用图11所示的例子来对这样构成的第2清洗装置的工作的例子进行说明。如该例子所示,在车辆sv正在地点p0与地点p1之间的区间中行驶的情况下,目视确认概率prj恒定(不上升),因此,基于第3映射map3而清洗阈值th被设定为第1阈值th1(=40%)。在车辆sv正在地点p1与地点p2之间行驶的情况下,判定为目视确认概率prj处于上升倾向。由此,在该情况下,基于第2映射map2来设定清洗阈值th。尤其是,在车辆sv正在地点p1a与地点p1b之间的区间中行驶的情况下,目视确认概率prj比第1概率pr1大且比第2概率pr2小,因此清洗阈值th被设定为第2阈值th2即3%。因此,在该区间中进行自动清洗的可能性变高。之后,若目视确认概率prj的上升不再被确认到(即,若车辆sv变成在从地点p2到地点p3为止的区间中行驶),则再次基于第3映射map3来设定清洗阈值th。
176.如以上说明那样,根据第2清洗装置,在判定为目视确认概率prj不上升的情况下,清洗阈值th维持为比较高的值(例如,40%),因此进行自动清洗的频度降低。由此,能够降低清洗液的消耗量。而且,根据第2清洗装置,在判定为目视确认概率prj处于上升倾向的情况下,在目视确认概率prj变得非常高之前(即,在目视确认概率prj比第1概率pr1大且比第2概率pr2小的期间),清洗阈值th被设定为极小的第2阈值th2(例如,3%)。由此,在目视确认概率prj变得非常高的可能性高的情况下,能够事先进行自动清洗。而且,在目视确认概率prj非常高的情况下,清洗阈值th被设定为极大的第3阈值th3(例如,90%),因此能够降低进行自动清洗的可能性。
177.《《第3实施方式》》
178.本发明的第3实施方式的车载传感器清洗装置(以下,称作“第3清洗装置”)与第1清洗装置同样,以目视确认概率prj越大则清洗阈值th越大的方式设定清洗阈值th。不过,第3清洗装置仅在判定为驾驶员正在观察显示器的期间通过将清洗阈值th设定为最大值而避免自动清洗开始这一点及停止执行中的自动清洗这一点上与第1清洗装置不同。即,第3清洗装置在判定为驾驶员正在观察显示器的期间禁止清洗处理的执行。
179.《具体工作》
180.第3实施方式的ecu10的cpu执行图7及图8所示的例程。而且,cpu每当经过预定时间时执行在取代图5的图12中由流程图表示的例程。此外,图7及图8的例程已经进行了说明,因此它们的说明省略。而且,关于图12所示的步骤中的与图5所示的“关于处理内容已说明的步骤”相同的步骤,省略其说明。图12的例程在追加了步骤1205、步骤1210及步骤1215的处理这一点上与图5的例程不同。
181.cpu从步骤1200开始处理,执行步骤505~步骤515的处理。接着,cpu进入步骤1205,判定当前时间点的确认标志xf的值是否是“0”。
182.在当前时间点的确认标志xf的值是“0”的情况下,cpu在步骤1205中判定为“是”,执行前述的步骤520的处理而决定清洗阈值th后,进入步骤525以后的处理。
183.相对于此,在当前时间点的确认标志xf的值是“1”的情况下,cpu在步骤1205中判定为“否”而执行以下叙述的“步骤1210及步骤1215的处理”后,进入步骤525以后的处理。
184.步骤1210:cpu将清洗阈值th设定为相当于脏污指标值的最大值的值(在本例中是100%)。其结果,不会在步骤530中判定为“是”,因此清洗处理不再开始(清洗处理被禁止)。
185.步骤1215:cpu在当前时间点下存在自动清洗(及基于未图示的手动开关的操作的清洗)为实施中的相机传感器的情况下,停止(禁止)其清洗。更具体地说,cpu停止第1泵40及第2泵50中的在当前时间点下正被驱动的泵的驱动。
186.使用图13所示的例子来说明这样构成的第3清洗装置的工作的例子。此外,在图13中,以使目视确认概率prj及清洗阈值th连续地变化的方式简化了描绘。在该例子中,在车辆sv正在地点p0与地点p1d之间、地点p1e与地点p2a之间及地点p2b与地点p2c之间的各区间中行驶的情况下,判定为驾驶员不是正在观察显示器(确认标志xf=0)。由此,在这些区间中,第3清洗装置与第1清洗装置同样地工作。
187.相对于此,在车辆sv正在地点p1d与地点p1e之间、地点p2a与地点p2b之间及地点p2c与地点p3之间的各区间中行驶的情况下,判定为驾驶员正在观察显示器(确认标志xf=1)。由此,在这些区间中,第3清洗装置将清洗阈值th设定为相当于脏污指标值的最大值的值(在本例中是100%),并且停止第1泵40及第2泵50中的在各时间点下正被驱动的泵的驱动而停止清洗。
188.根据第3清洗装置,在驾驶员观察显示于显示器的周边图像的期间,不进行相机传感器的检测面部的自动清洗,因此周边图像不会因清洗液向检测面部的喷射而变得不清晰。因此,驾驶员能够通过目视确认未变得不清晰的周边图像来确认周边的状况。
189.本发明不限定于上述各实施方式,能够在本发明的范围内采用各种变形例。
190.例如,在上述各实施方式中,目视确认概率数据库60b也可以如图14所示那样配置于云100内。云100与多个车辆sv经由通信线路in1(例如,互联网线路)而以能够交换信息(数据)的方式连接。此外,以下,第1~第3清洗装置的各自被简称作“清洗装置”。
191.云100包括服务器101及存储装置102。服务器101包括计算机。存储装置102具有地图信息数据库60a及目视确认概率数据库60b。服务器101能够进行存储于存储装置102的各数据库的数据的检索及读出并且将数据向各数据库写入。
192.搭载于车辆sv的清洗装置取代存储装置60而具备无线通信装置110。无线通信装置110是用于经由通信线路in1而与云100进行信息的通信的无线通信终端。
193.在该情况下,例如,ecu10的cpu执行图7所示的例程。不过,该cpu在图7的步骤720的处理之后,执行将保存于ram的将“当前时间点的确认标志xf的值和位置信息”互相建立了关联的数据集使用无线通信装置110而向云100发送的处理。
194.服务器101若从某一车辆sv接收到上述的数据集,则进行图8所示的例程的处理,在其步骤850中将目视确认概率prj与区域arj建立关联后向云100的目视确认概率数据库60b保存。
195.而且,ecu10的cpu在图5、图10及图12等所示的例程的步骤515中,向云100发送将车辆sv的当前时间点的区域arj和确定自身的车辆sv的车辆id建立了关联的数据集。云100的服务器101若接收到包括区域arj和车辆id的数据集,则从目视确认概率数据库60b读出与该区域arj对应的目视确认概率prj。而且,服务器101将读出的目视确认概率prj向由车辆id确定的车辆sv发送。然后,ecu10的cpu在步骤515中接收从服务器101发送来的目视确认概率prj。
196.此外,也可以是,服务器101具有第1映射map1、第2映射map2及第3映射map3等,使用它们通过与上述的清洗装置的ecu10执行的工序(工作步骤)同样的工序来决定清洗阈值
th。在该情况下,也可以是,服务器101对发送了车辆id的车辆sv发送清洗阈值th,车辆sv的ecu10接收该清洗阈值th,使用该接收到的清洗阈值th来进行“步骤525~步骤535”的处理。
197.作为代替,也可以是,在服务器101具有第1映射map1、第2映射map2及第3映射map3等,使用它们通过与上述的清洗装置的ecu10执行的工序同样的工序来决定清洗阈值th的情况下,服务器101进一步构成为:
198.从车辆sv取得“车辆id、车辆位置信息或车辆sv的当前时间点的区域arj、及该车辆sv的相机传感器的脏污指标值”,
199.取得目视确认概率prj,
200.基于目视确认概率prj来决定清洗阈值th,
201.进行脏污指标值是否超过了清洗阈值th的判定(进行自动清洗开始条件是否成立的判定),
202.将该判定结果向由车辆id确定的车辆sv发送。
203.在该情况下,该车辆sv的ecu10在接收到的判定结果表示“自动清洗条件成立”的情况下进行自动清洗处理。
204.车辆sv也可以具备能够拍摄所述检测面部的“脏污监视用相机”。在该情况下,上述的脏污指标值也可以通过分析该监视用相机的图像来求出。而且,上述的脏污指标值还可以通过其他的公知的方法来求出。
205.在上述实施方式中,通过基于目视确认概率prj而变更清洗阈值th,变更了自动清洗开始条件的成立容易度。取代于此,也可以通过将脏污指标值基于目视确认概率prj进行修正来变更自动清洗开始条件的成立容易度。在该情况下,例如,在上述实施方式中,在清洗阈值th变高的条件下,将清洗阈值th维持为恒定值并且以使脏污指标值变小的方式修正该脏污指标值。并且,在该修正后的脏污指标值超过维持为恒定值的清洗阈值th的情况下判定为自动清洗开始条件成立即可。而且,也可以是通过基于目视确认概率prj修正脏污指标值和清洗阈值th双方来变更自动清洗开始条件的成立容易度。
206.上述各实施方式也可以应用于如下车载传感器清洗装置:包括相机传感器以外的其他的车载传感器和用于清洗该其他的车载传感器的检测面部的清洗单元,且构成为将基于其他的车载传感器取得的信息的信息显示于显示器。在该情况下,作为车载传感器,例如是雷达传感器及超声波传感器等接收通过在车辆sv的外部露出的检测面部的“电磁波或声波”的传感器即可。该电磁波例如包括可见光激光、红外线、毫米波段的电波等电磁波。声波例如包括超声波。
207.前相机11也可以配置于车辆sv的前风窗玻璃的车室内侧,利用通过前风窗玻璃的可见光来取得前方图像信息。在该情况下,前相机11的检测面部是向前相机11入射的可见光透过的“前风窗玻璃的车外侧的一部分(窗部)”。
208.同样,后相机12也可以配置于车辆sv的后部玻璃的车室内侧,利用通过后部玻璃的可见光来取得后方图像信息。在该情况下,后相机12的检测面部是向后相机12入射的可见光透过的“后部玻璃的车外侧的一部分(窗部)”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1