一种基于触发的高机动信道模拟装置及方法与流程
1.本发明属于无线信息传输技术领域,具体涉及一种基于触发的高机动信道模拟装置及方法。
背景技术:
2.由于收发信机的高速移动,高机动通信环境不断发生变化,其信道状态也在不断发生变化。电波传播信号容易受周围地貌以及天气状况等因素的影响,以及收发信机的高速移动,使得接收信号包络快速随机起伏,从而导致整个无线通信链路的传输性能下降。随着对高机动场景下无线通信系统的安全性、可靠性和实时性要求的不断提高,对高机动场景下信道的研究也越显重要。高机动场景下无线通信系统的研究开发过程中,需要反复多次的进行测试试验。虽然外场试验环境相对真实,但外场实验环境固定,信道类型单一,而且外场需要耗费大量人力和财力,试验成本较高,同时容易受许多因素的限制,机动性差。传统的动态场景的信道仿真实现方法有两种:一是采用高机动信道参数预存的方法,高机动通信环境下的信道模型复杂,信道参数比较多,该方法受存储容量限制,只能实现短时间的动态信道仿真;二是通过串口对硬件参数进行实时更新,该方法受串口传输速率的影响,无法传输大量的信道模型参数,因此该方法信道模型比较简单,更新速率比较低,无法满足高机动信道仿真的需求。
3.在现有高机动信道模拟技术中,通常预先存储的方式实现高机动信道模拟,该方法受存储资源限制,模拟仿真时间有限,无法持续进行模拟仿真。
技术实现要素:
4.针对现有技术中存在的上述技术问题,本发明提出了一种基于触发的高机动信道模拟装置及方法,设计合理,克服了现有技术的不足,具有良好的效果。
5.为了实现上述目的,本发明采用如下技术方案:
6.一种基于触发的高机动信道模拟装置,包括上位机和fpga;上位机中设置有信道参数生成单元;fpga中设置有ddr控制单元、信道参数控制单元以及信道仿真单元;
7.信道参数生成单元,被配置为用于根据高机动运行轨迹、高机动通信场景、收发天线方向图和增益、仿真时长参数,计算生成不同时刻的12子径的信道参数,并将每10s仿真时长的信道参数存储为一个数据文件;
8.ddr控制单元,被配置为用于利用基于触发的读写交替操作技术,实现对ddr存储器中的高机动场景下的动态信道参数的持续更新读写,满足长时间仿真模拟的要求;
9.信道参数控制单元,被配置为用于通过计时触发,实现100次/每秒的信道状态更新;
10.信道仿真单元,被配置为用于采用信道参数动态更新技术,实现支持12条子径的高机动动态信道模拟。
11.此外,本发明还提到一种基于触发的高机动信道模拟方法,该方法采用如上所述
的一种基于触发的高机动信道模拟装置,具体包括如下步骤:
12.步骤1:用户根据高机动运行轨迹、高机动通信场景、收发天线方向图和增益、仿真时长参数,计算生成不同时刻的12子径的信道参数,并将每10s仿真时长的信道参数存储为一个数据文件;
13.步骤2:上位机首先向fpga中的ddr读写控制器发送fpga中的同步动态随机存储器的第一段存储空间的起始、结束地址,然后发送写开始命令;
14.步骤3:上位机通过数据接口将第一个时间段10s仿真时长的数据文件发送给fpga中的输入缓存fifo,fpga中的ddr读写控制器根据输入缓存fifo的存储空间状态向同步动态随机存储器发送写操作指令,控制同步动态随机存储器将信道参数存储到同步动态随机存储器的第一段存储空间;
15.步骤4:第一个时间段10s仿真时长的数据文件发送完成后,上位机向fpga中的ddr读写控制器发送写结束命令;
16.步骤5:上位机打开运行开关,上位机向fpga中的ddr读写控制器发送读开始命令;
17.步骤6:fpga中的ddr读写控制器收到读开始指令后,根据输出缓存fifo的存储空间状态向同步动态随机存储器发送读操作指令,控制同步动态随机存储器读取信道参数,并将信道参数读取到输出缓存fifo;
18.步骤7:上位机打开运行开关后,信道参数控制单元根据运行时钟开始计时,每隔10ms产生一次读指令,从fpga中的输出缓存fifo读取一个时刻12子径的信道参数,并将参数配置给相应的子径;
19.步骤8:fpga控制同步动态随机存储器在读取到第一段存储空间十分之一数据量后,ddr读写控制器产生触发信号,并通过数据接口将触发信号发送给上位机;
20.步骤9:上位机收到fpga发送的触发信号后,向fpga中的ddr读写控制器发送同步动态随机存储器的第二段存储空间的起始、结束地址,然后发送写开始命令;
21.步骤10:上位机通过数据接口将第二个时间段10s仿真时长的数据文件发送给fpga中的输入缓存fifo,fpga中的ddr读写控制器根据输入缓存fifo的存储空间状态向同步动态随机存储器发送写操作指令,控制同步动态随机存储器将信道参数存储到同步动态随机存储器的第二段存储空间;
22.步骤11:第二个时间段10s仿真时长的数据文件发送完成后,上位机向fpga中的ddr读写控制器发送写结束命令;
23.步骤12:fpga中的ddr读写控制器控制ddr读取信道参数时,当读取到第一段存储空间的结束地址时,将从第二段存储空间的开始地址开始读取信道参数;
24.步骤13:fpga控制同步动态随机存储器在读取到第二段存储空间十分之一数据量后,ddr读写控制器再次产生触发信号,并通过数据接口将触发信号发送给上位机;
25.步骤14:上位机收到fpga发送的触发信号后,向fpga中的ddr读写控制器发送同步动态随机存储器的第一段存储空间的起始、结束地址,然后发送写开始命令;
26.步骤15:重复步骤3~步骤14,依此交替进行,根据仿真时段顺序将第n个时间段10s仿真时长的数据文件交替存储到第一段或者第二段ddr存储空间,实现高机动信道模拟装置的长时间持续仿真;
27.步骤16:在执行步骤3~步骤14的过程中,fpga通过ddr读写控制器中的时序判断,
交替控制同步动态随机存储器的读写操作,保证fpga中的输入缓存fifo中数据全部存储到同步动态随机存储器中,同时保证fpga中的输出缓存fifo中数据不为空。
28.本发明所带来的有益技术效果:
29.本发明利用基于触发的读写交替操作技术,对ddr存储器中的高机动场景下的动态信道参数的持续更新读写,实现长时间的高机动信道连续仿真模拟;
30.基于同步动态随机存储器的高机动信道模拟技术,实现信道更新速率达到100次/秒,每个信道状态最大可支持12条子径信道模拟。
附图说明
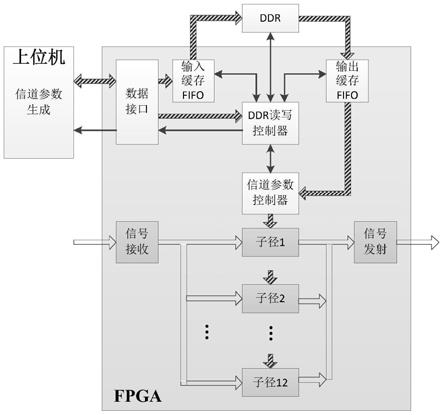
31.图1为高机动信道模拟装置整体框图。
具体实施方式
32.下面结合附图以及具体实施方式对本发明作进一步详细说明:
33.实施例1:
34.一种基于触发的高机动信道模拟装置,如图1所示,包括上位机和fpga;上位机中设置有信道参数生成单元;fpga中设置有ddr控制单元、信道参数控制单元以及信道仿真单元;
35.信道参数生成单元,被配置为用于根据高机动运行轨迹、高机动通信场景、收发天线方向图和增益、仿真时长参数,计算生成不同时刻的12子径的信道参数,并将每10s仿真时长的信道参数存储为一个数据文件;
36.ddr控制单元,被配置为用于利用基于触发的读写交替操作技术,实现对ddr存储器中的高机动场景下的动态信道参数的持续更新读写,满足长时间仿真模拟的要求;
37.信道参数控制单元,被配置为用于通过计时触发,实现100次/每秒的信道状态更新;
38.信道仿真单元,被配置为用于采用信道参数动态更新技术,实现支持12条子径的高机动动态信道模拟。
39.该高机动信道模拟装置工作时,首先,用户根据高机动运行轨迹、高机动通信场景、收发天线方向图和增益等参数,计算生成不同时刻的12子径的信道参数,并每10s仿真时长的信道参数存储为一个数据文件;然后,先将第一个时间段10s仿真时长的数据文件通过数据接口传递到ddr(同步动态随机存储器)的第一段存储空间;装置启动运行后,fpga开始控制同步动态随机存储器读取信道参数,并根据运行时钟开始计时,每隔10ms读取一个时刻12子径的信道参数,并且在读取到第一段存储空间十分之一数据量后,fpga通过数据接口向上位机软件发送触发信号;上位机软件收到触发信号后,将第二个时间段10s仿真时长的数据文件通过数据接口传递到同步动态随机存储器的第二段存储空间;当读取到第二段存储空间十分之一数据量后,fpga再次通过数据接口向上位机软件发送触发信号;上位机软件收到触发信号后,将第三个时间段10s仿真时长的数据文件通过数据接口传递到同步动态随机存储器的第一段存储空间;依此交替进行,实现高机动信道模拟装置的长时间持续仿真,与此同时,fpga通过时序判断控制同步动态随机存储器的读写操作,保证信道参数连续不间断读取。实现信道更新速率达到100次/秒,每个信道状态最大可支持12条子径
信道模拟。
40.实施例2:
41.在上述实施例1的基础上,本发明还提到一种基于触发的高机动信道模拟方法,具体包括如下步骤:
42.步骤1:用户根据高机动运行轨迹、高机动通信场景、收发天线方向图和增益、仿真时长参数,计算生成不同时刻的12子径的信道参数,并将每10s仿真时长的信道参数存储为一个数据文件;
43.步骤2:上位机首先向fpga中的ddr读写控制器发送ddr的第一段存储空间的起始、结束地址,然后发送写开始命令;
44.步骤3:上位机通过数据接口将第一个时间段10s仿真时长的数据文件发送给fpga中的输入缓存fifo,fpga中的ddr读写控制器根据输入缓存fifo的存储空间状态向同步动态随机存储器发送写操作指令,控制同步动态随机存储器将信道参数存储到同步动态随机存储器的第一段存储空间;
45.步骤4:第一个时间段10s仿真时长的数据文件发送完成后,上位机向fpga中的ddr读写控制器发送写结束命令;
46.步骤5:上位机打开运行开关,上位机向fpga中的ddr读写控制器发送读开始命令;
47.步骤6:fpga中的ddr读写控制器收到读开始指令后,根据输出缓存fifo的存储空间状态向同步动态随机存储器发送读操作指令,控制同步动态随机存储器读取信道参数,并将信道参数读取到输出缓存fifo;
48.步骤7:上位机打开运行开关后,信道参数控制单元根据运行时钟开始计时,每隔10ms产生一次读指令,从fpga中的输出缓存fifo读取一个时刻12子径的信道参数,并将参数配置给相应的子径;
49.步骤8:fpga控制同步动态随机存储器在读取到第一段存储空间十分之一数据量后,ddr读写控制器产生触发信号,并通过数据接口将触发信号发送给上位机;
50.步骤9:上位机收到fpga发送的触发信号后,向fpga中的ddr读写控制器发送同步动态随机存储器的第二段存储空间的起始、结束地址,然后发送写开始命令;
51.步骤10:上位机通过数据接口将第二个时间段10s仿真时长的数据文件发送给fpga中的输入缓存fifo,fpga中的ddr读写控制器根据输入缓存fifo的存储空间状态向ddr发送写操作指令,控制同步动态随机存储器将信道参数存储到同步动态随机存储器的第二段存储空间;
52.步骤11:第二个时间段10s仿真时长的数据文件发送完成后,上位机向fpga中的ddr读写控制器发送写结束命令;
53.步骤12:fpga中的ddr读写控制器控制ddr读取信道参数时,当读取到第一段存储空间的结束地址时,将从第二段存储空间的开始地址开始读取信道参数;
54.步骤13:fpga控制同步动态随机存储器在读取到第二段存储空间十分之一数据量后,ddr读写控制器再次产生触发信号,并通过数据接口将触发信号发送给上位机;
55.步骤14:上位机收到fpga发送的触发信号后,向fpga中的ddr读写控制器发送同步动态随机存储器的第一段存储空间的起始、结束地址,然后发送写开始命令;
56.步骤15:重复步骤3~步骤14,依此交替进行,根据仿真时段顺序将第n个时间段
10s仿真时长的数据文件交替存储到第一段或者第二段ddr存储空间,实现高机动信道模拟装置的长时间持续仿真;
57.步骤16:在执行步骤3~步骤14的过程中,fpga通过ddr读写控制器中的时序判断,交替控制同步动态随机存储器的读写操作,保证fpga中的输入缓存fifo中数据全部存储到同步动态随机存储器中,同时保证fpga中的输出缓存fifo中数据不为空。
58.当然,上述说明并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1