一种通信冗余的电子电气架构的制作方法
1.本发明涉及新能源汽车技术,特别涉及一种通信冗余的电子电气架构。
背景技术:
2.电子电气架构是电动汽车的核心,一辆汽车的电子电气架构的水平直接影响了整车的各功能响应速度,安全程度,可搭载功能的可能性,以及控制器与线束成本等。市面上的arcfoxαt和arcfoxαs电子电气架构,以分布式为主,使用了部分域控制器;而arcfoxαs hi版,则使用了多个域控制器以及应用了千兆以太网,先进性程度在市场上处于领先地位。使用部分域控制器或者多个域控制器,一旦域控制器与网关之间的通信发生故障,将影响整个域控制器下的车辆集成单元器的通信。因此,现有的电子电器构架无法在满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
技术实现要素:
3.本发明实施例提供一种通信冗余的电子电气架构,用以解决现有技术中电子电器构架无法在满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
4.为了解决上述技术问题,本发明采用如下技术方案:
5.一种通信冗余的电子电气架构,包括:
6.至少两个整车集成单元、整车数据中心、自动驾驶数据中心以及座舱数据中心;
7.所述至少两个整车集成单元之间呈环状连接;
8.所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接。
9.进一步地,每个所述车辆集成单元之间通过千兆以太网连接;
10.所述至少两个整车集成单元,包括:
11.第一车辆集成单元、第二车辆集成单元、第三车辆集成单元以及第四车辆集成单元。
12.进一步地,所述至少两个整车集成单元之间呈环状连接,包括:
13.所述第一车辆集成单元的第一端与所述第二车辆集成单元的第一端连接,所述第二车辆集成单元的第二端与所述第三车辆集成单元的第一端连接,所述第三车辆集成单元的第二端与所述第四车辆集成单元的第一端连接,所述第四车辆集成单元的第二端与所述第一车辆集成单元的第二端连接。
14.进一步地,所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接,包括:
15.所述整车数据中心与所述第二车辆集成单元以及所述第四车辆集成单元之间通过千兆以太网连接;
16.所述自动驾驶数据中心与所述第二车辆集成单元通过千兆以太网连接;
17.所述座舱数据中心与所述第四车辆集成单元通过千兆以太网连接。
18.进一步地,所述第一车辆集成单元用于采集包括前舱蓄电池、车灯和喇叭的第一状态信息以及进行信息路由;
19.所述第二车辆集成单元用于采集包括车身左侧车门、车轮、制动系统和座椅的第二状态信息以及进行信息路由;
20.所述第三车辆集成单元用于采集包括充电口、后尾门以及后灯的第三状态信息以及进行信息路由;
21.所述第四车辆集成单元用于采集包括车身右侧车门、车轮、制动系统和座椅的第四状态信息以及进行信息路由。
22.进一步地,所述座舱数据中心通过灵活数据速率的控制器局域网与所述车辆的信息娱乐域总线连接。
23.进一步地,所述自动驾驶数据中心通过灵活数据速率的控制器局域网与所述车辆的制动总线连接。
24.进一步地,所述自动驾驶数据中心通过控制器局域网与所述车辆的防撞预警系统连接。
25.进一步地,所述第二整车集成单元通过控制器局域网与所述车辆的底盘域总线连接。
26.进一步地,所述第四整车集成单元通过控制器局域网与所述车辆的车身域总线连接。
27.本发明的有益效果是:
28.本发明实施例的通信冗余的电子电气架构,通过数据计算中心加整车集成单元的物理构架,整车集成单元之间采用环状网络的形式,且数据计算中心与整车集成单元之间双路连接,实现通信冗余以及为面向服务的通信结构的设计提供物理支持。本发明实施例的通信冗余的电子电气架构,在保证车辆能够满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
附图说明
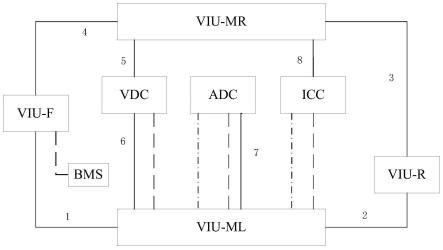
29.图1表示本发明实施例的通信冗余的电子电气架构的结构示意图。
具体实施方式
30.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。在下面的描述中,提供诸如具体的配置和组件的特定细节仅仅是为了帮助全面理解本发明的实施例。因此,本领域技术人员应该清楚,可以对这里描述的实施例进行各种改变和修改而不脱离本发明的范围和精神。另外,为了清楚和简洁,省略了对已知功能和构造的描述。
31.应理解,说明书通篇中提到的“一个实施例”或“一实施例”意味着与实施例有关的特定特征、结构或特性包括在本发明的至少一个实施例中。因此,在整个说明书各处出现的“在一个实施例中”或“在一实施例中”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。
32.本发明针对现有技术中电子电器构架无法在满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性的问题,提供一种电子电气架构。
33.本发明实施例提供了一种通信冗余的电子电气架构,包括:
34.至少两个整车集成单元(vehicle integrated unit,viu)、整车数据中心(vehicle data center,vdc)、自动驾驶数据中心(automous data center,adc)以及座舱数据中心(cockpit data center,icc);
35.所述至少两个整车集成单元之间呈环状连接;
36.所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接。
37.本发明实施例的通信冗余的电子电气架构,通过将整车集成单元进行环状网络俩连接,对各个整车集成单元进行了通信冗余的设计,在其中两个整车集成单元之间的通信异常后,两个整车集成单元之间的通信数据可以通过环形网络达到。所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接,保证了在数据计算中心与数据计算中心之间的通信异常后,通过冗余的通信通道进行通信。
38.本发明实施例的通信冗余的电子电气架构,通过数据计算中心加整车集成单元的物理构架,整车集成单元之间采用环状网络的形式,且数据计算中心与整车集成单元之间双路连接,实现通信冗余以及为面向服务的通信结构的设计提供物理支持。本发明实施例的通信冗余的电子电气架构,在保证车辆能够满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
39.如图1所示,每个所述车辆集成单元之间通过千兆以太网连接;
40.所述至少两个整车集成单元,包括:
41.第一车辆集成单元viu-f、第二车辆集成单元viu-ml、第三车辆集成单元viu-r以及第四车辆集成单元viu-mr。
42.可选地,所述至少两个整车集成单元之间呈环状连接,包括:
43.所述第一车辆集成单元viu-f的第一端与所述第二车辆集成单元viu-ml的第一端通过第一千兆以太网1连接,所述第二车辆集成单元viu-ml的第二端与所述第三车辆集成单元viu-r的第一端通过第二千兆以太网2连接,所述第三车辆集成单元viu-r的第二端与所述第四车辆集成单元viu-mr的第一端通过第三千兆以太网3连接,所述第四车辆集成单元viu-mr的第二端与所述第一车辆集成单元viu-f的第二端通过第四千兆以太网4连接。
44.本发明实施例的通信冗余的电子电气架构,通过数据计算中心加整车集成单元的物理构架,整车集成单元之间采用环状网络的形式,且数据计算中心与整车集成单元之间双路连接,实现通信冗余以及为面向服务的通信结构的设计提供物理支持。本发明实施例的通信冗余的电子电气架构,在保证车辆能够满足多种智能功能的快速低延时响应的同时有效地保证车辆运行的安全性和可靠性。
45.目前市面上较为先进的架构应用的通信方式是canfd通信,通信速率约为2mbps,而千兆以太网为1000mbps,理论通信速率是前者的500倍,相比于最常见的can通信,理论上甚至快2000倍。环网架构充分发挥了千兆以太网的通信速度的优势的同时,将多余的通信速率的优势转化为了功能的可靠性与安全性的优势。
46.千兆以太网的高负载率给高速通信提供了条件,使用了四个以区域来划分的区域
控制器,viu-f(前侧区域控制器)、viu-mr(中右侧区域控制器)、viu-r(后侧区域控制器)、以及viu-ml(中左侧区域控制器),每个区域控制器控制距离控制器的物理距离较近的执行器,从而达到了减少线束长度的目的,进而减轻车身重量,降低了成本。除了区域控制器之外,还采用了三个中央控制单元,整车数据中心vdc、自动驾驶数据中心adc以及座舱数据中心icc,作为架构大脑,进行复杂的计算和逻辑判断。上图中可以看到四个区域控制器之间用四条以太网首尾相连,呈环状,三个中央控制单元用以太网连在两个区域控制器上,其中整车数据中心vdc作为整车控制器vcu的升级版,承载了众多重要功能,因而额外使用了一条以太网作为通信冗余。当原本的通信线路出现故障,报文将从另一条线路通过。
47.本发明一实施例中,若第一车辆集成单元viu-f与第二车辆集成单元viu-ml之间的第一千兆以太网1产生故障,使得第一车辆集成单元viu-f与第二车辆集成单元viu-ml之间的通信异常,则可以通过第二千兆以太网2、第三千兆以太网3以及第四千兆以太网4的通路进行数据传输。通过千兆以太网的环状结构为通信冗余的电子电气架构提供了通信冗余,保证通信的高安全和高实时性。
48.可选地,所述整车数据中心、自动驾驶数据中心以及座舱数据中心均与至少一个所述整车集成单元连接,包括:
49.所述整车数据中心vdc与所述第二车辆集成单元viu-ml以及所述第四车辆集成单元viu-mr之间通过第五千兆以太网5和第六千兆以太网6连接;
50.所述自动驾驶数据中心adc与所述第二车辆集成单元viu-ml通过第七千兆以太网7连接;
51.所述座舱数据中心icc与所述第四车辆集成单元viu-mr通过第八千兆以太网8连接。
52.可选地,所述整车数据中心vdc与第四辆集成单元viu-mr之间的通信异常时,可以通过第六千兆以太网6,然后通过第一千兆以太网1和第四千兆以太网4将通信数据进行传输;或者可以通过第六千兆以太网6,然后通过第二千兆以太网2和第三千兆以太网3将通信数据进行传输。
53.本发明实施例的通信冗余的电子电气架构,通过多条千兆以太网与整车数据中心连接的方式,对整车数据中心进行通信冗余设计,构能够以较小的成本,带来较大的安全性的收益。
54.可选地,所述第一车辆集成单元viu-f用于采集包括前舱蓄电池、车灯和喇叭的第一状态信息以及进行信息路由;
55.所述第二车辆集成单元viu-ml用于采集包括车身左侧车门、车轮、制动系统和座椅的第二状态信息以及进行信息路由;
56.所述第三车辆集成单元viu-r用于采集包括充电口、后尾门以及后灯的第三状态信息以及进行信息路由;
57.所述第四车辆集成单元viu-mr用于采集包括车身右侧车门、车轮、制动系统和座椅的第四状态信息以及进行信息路由。
58.可选地,所述座舱数据中心通过灵活数据速率的控制器局域网canfd与所述车辆的信息娱乐域总线连接。
59.可选地,所述自动驾驶数据中心通过灵活数据速率的控制器局域网canfd与所述
车辆的制动总线连接。
60.可选地,所述自动驾驶数据中心通过控制器局域网can与所述车辆的防撞预警系统连接。
61.可选地,所述第二整车集成单元通过控制器局域网can与所述车辆的底盘域总线连接。
62.可选地,所述第四整车集成单元通过控制器局域网can与所述车辆的车身域总线连接。
63.以上所述的是本发明的优选实施方式,应当指出对于本技术领域的普通人员来说,在不脱离本发明所述的原理前提下还可以作出若干改进和润饰,这些改进和润饰也在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1