深度图生成方法、探测系统及SPAD传感器与流程
本发明涉及成像,特别是涉及深度图生成方法、探测系统及spad传感器。
背景技术:
1、基于spad(single photon avalanche diode,单光子雪崩二极管)阵列的三维成像技术,是近年来的研究热点,在消费电子、安防、机器人、自动驾驶等领域有巨大的应用前景。
2、对于spad传感器而言,spad传感器内spad阵列的阵列规模越大,spad传感器的性能越好,而增大spad传感器内spad阵列的规模,将导致数据存储需求的倍增,这意味着需要更大的存储面积,这在芯片面积有限的spad传感器是难以实现的,使得数据存储成为限制spad阵列的阵列规模提高的重要因素。
3、因此,如何避免数据存储对提高spad阵列的阵列规模的限制是亟需解决的技术问题。
技术实现思路
1、本发明实施例的目的在于提供深度图生成方法、探测系统及spad传感器,以可以避免数据存储对提高spad阵列的阵列规模的限制。具体技术方案如下:
2、第一方面,本发明实施例提供一种深度图生成方法,应用于主控单元,所述主控单元与spad传感器相连接,所述方法包括:
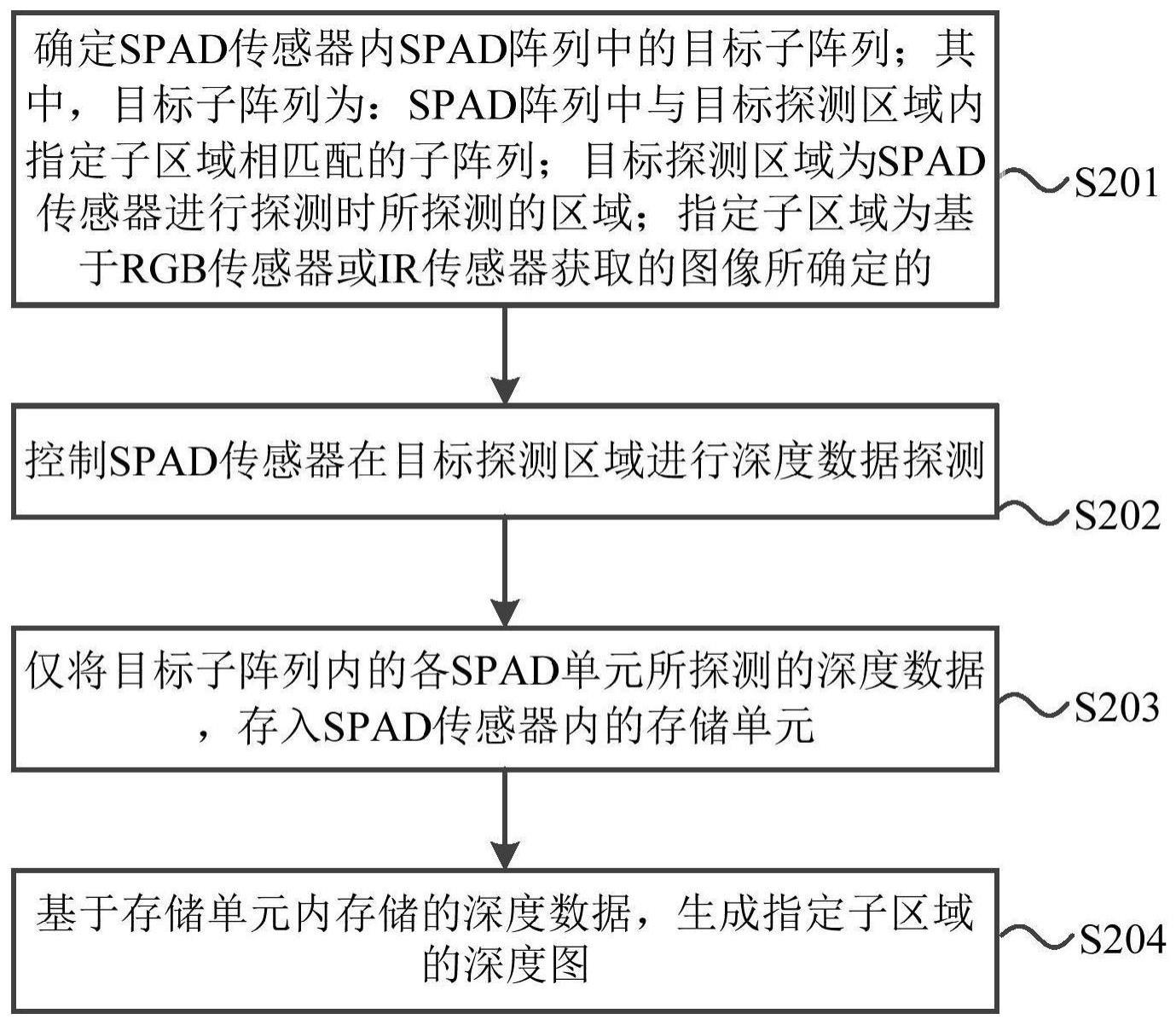
3、确定所述spad传感器内spad阵列中的目标子阵列;其中,所述目标子阵列为:所述spad阵列中与目标探测区域内指定子区域相匹配的子阵列;所述目标探测区域为所述spad传感器进行探测时所探测的区域;所述指定子区域为基于rgb传感器或ir传感器获取的图像所确定的;
4、控制所述spad传感器在所述目标探测区域进行深度数据探测;
5、仅将所述目标子阵列内的各spad单元所探测的深度数据,存入所述spad传感器内的存储单元;
6、基于所述存储单元内存储的深度数据,生成针对所述指定子区域的深度图。
7、可选的,所述确定所述spad传感器内spad阵列中的目标子阵列,包括:
8、获取所述目标探测区域的二维图像,并对所述二维图像进行感兴趣目标识别;
9、当在所述二维图像中检测到感兴趣目标时,将所检测到的感兴趣目标所在的区域确定为指定子区域;
10、基于预先构建的所述二维图像与所述spad阵列之间的位置映射关系,对所确定的指定子区域的位置信息进行映射,得到针对所述spad传感器内spad阵列的子阵列位置信息。
11、将所述spad阵列中所述子阵列位置信息所指示的子阵列,确定为目标子阵列。
12、可选的,所述获取所述目标探测区域的二维图像,包括:
13、通过所述rgb传感器和/或所述ir传感器,获取目标探测区域的二维图像。
14、可选的,所述位置映射关系为:基于所述spad传感器的内参和外参、以及所述rgb传感器或所述ir传感器的内参和外参所确定的。
15、可选的,所述仅将所述目标子阵列内的各spad单元所探测的深度数据,存入所述spad传感器内的存储单元,包括:
16、按照预设的spad单元的选择顺序,从所述目标子阵列内的各spad单元中,选择一spad单元,作为目标spad单元;
17、将所述目标spad单元所探测的深度数据,存入所述spad传感器内的存储单元;
18、返回执行所述按照预设的spad单元的选择顺序,从所述目标子阵列内的各spad单元中,选择一spad单元的步骤,直至所述目标子阵列内的各spad单元内的探测数据均被存储。
19、可选的,所述spad传感器还包括选择电路,所述选择电路包括:行译码器和列译码器,所述行译码器用于向每一spad单元输出行信号,所述列译码器用于向每一spad单元输出列信号;
20、所述将所述目标spad单元所探测的深度数据,存入所述spad传感器内的存储单元,包括:
21、控制所述行译码器向所述目标spad单元输出行信号,并控制所述列译码器向所述目标spad单元输出列信号,以将所述目标spad单元的输出状态配置为可输出状态;
22、控制可输出状态下的所述目标spad单元,将所探测的深度数据输出至所述spad传感器内的存储单元。
23、可选的,在所述基于所述存储单元内存储的深度数据,生成针对所述指定子区域的深度图之前,所述方法还包括:
24、判断所述spad传感器进行深度数据探测的次数是否达到预设的探测次数阈值;
25、若未达到,则返回执行所述控制所述spad传感器在所述目标探测区域进行深度数据探测的步骤;
26、若达到,则执行所述基于所述存储单元内存储的深度数据,生成针对所述指定子区域的深度图的步骤。
27、可选的,所述将所述目标子阵列内的各spad单元所探测的深度数据,存入所述spad传感器内的存储单元之后,还包括:
28、基于所述存储单元内各spad单元所探测的深度数据,构建每一spad单元对应的直方图,每一spad单元对应的直方图用于存储该spad单元所探测的深度数据;
29、所述基于所述存储单元内存储的深度数据,生成针对所述指定子区域的深度图,包括:
30、针对所述目标子阵列内的每一spad单元,从该spad单元对应的直方图中,选择该spad单元探测的占比最多的探测数据,作为该spad单元的目标探测数据;
31、基于所述目标子阵列内各spad单元的目标探测数据,构建针对所述指定子区域的深度图。
32、可选的,所述目标探测区域被划分为多个指定子区域;
33、在所述确定所述spad传感器内spad阵列中的目标子阵列之前,所述方法还包括:
34、从所述多个指定子区域中确定一指定子区域,并将所述spad阵列中与该指定子区域相匹配的子阵列,作为目标子阵列;
35、在所述基于所述存储单元内存储的深度数据,生成针对所述指定子区域的深度图之后,所述方法还包括:
36、从多个指定子区域中,确定新的一指定子区域,并返回所述将所述spad阵列中与该指定子区域相匹配的子阵列,作为目标子阵列的步骤,直至针对每一指定子区域均生成深度图。
37、第二方面,本发明实施例提供一种spad传感器,所述spad传感器包括:spad阵列、选择电路和存储单元,所述选择电路包括:行译码器和列译码器,所述行译码器用于向所述spad阵列内每一spad单元输出行信号,所述列译码器用于向每一spad单元输出列信号;
38、所述spad传感器,用于在主控单元控制下,对目标探测区域进行深度数据探测,所述目标探测区域为所述spad传感器进行探测时所探测的区域;
39、所述行译码器,用于在接收到所述主控单元的输出指令时,向所接收到输出指令指示的目标spad单元输出行信号;其中,所述目标spad单元为所述主控单元在目标子阵列内各spad单元中确定的一spad单元,所述目标子阵列为所述主控单元在所述spad阵列中确定的与所述目标探测区域内指定子区域相匹配的子阵列;
40、所述列译码器,用于在接收到所述主控单元的输出指令时,向所接收到输出指令指示的目标spad单元输出列信号;
41、所述spad阵列内任一spad单元,在同时接收到行信号与列信号时,将输出状态转换为可输出状态;
42、可输出状态下的spad单元,用于在接收到所述主控单元的存储指令时,将所探测到的探测数据写入至所述存储单元;
43、所述存储单元,用于在接收到所述主控单元的控制指令时,输出所存储的探测数据,以使所述主控单元基于所述存储单元输出深度数据,生成针对所述指定子区域的深度图。
44、可选的,所述行译码器包含多条行输出线路,所述行译码器的一行输出线与所述spad阵列中的一条行spad单元连接,每一条行输出线用于向与其相连的spad单元输出行信号;
45、所述列译码器包含多条列输出线路,所述列译码器的一条列输出线与所述spad阵列中的一列spad单元连接,每一条列输出线用于向与其相连的spad单元输出列信号。
46、第三方面,本发明实施例提供一种探测系统,所述深度图生成系统包括:主控单元、spad传感器、rgb传感器或ir传感器;
47、所述rgb传感器或所述ir传感器,用于采集目标探测区域的图像,并基于所采集的图像确定指定子区域,以及将确定所述指定子区域传输至所述主控单元;
48、所述主控单元,用于接收所述指定子区域,并基于所述指定子区域,确定所述spad传感器内spad阵列中的目标子阵列,并基于所述目标子阵列,向所述spad传感器发送控制信号;
49、所述spad传感器,用于在接收到所述控制信号之后,在所述目标探测区域进行深度数据探测,并仅将所述目标子阵列内的各spad单元所探测的深度数据,存入所述spad传感器内的存储单元;
50、所述主控单元,还用于基于所述存储单元内存储的深度数据,生成针对所述指定子区域的深度图。
51、第四方面,本发明实施例提供一种电子设备,包括第一方面任一项所述方法的主控单元、通信接口、存储器、通信总线、spad传感器、rgb传感器或ir传感器,其中,主控单元,通信接口,存储器通过通信总线完成相互间的通信;
52、存储器,用于存放计算机程序;
53、主控单元,用于执行存储器上所存放的程序时,实现第一方面任一所述的方法步骤。
54、第五方面,本发明实施例提供一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现第一方面任一项所述的方法步骤。
55、本发明实施例有益效果:
56、本发明实施例所提供的深度图生成方法中,可以确定spad阵列中与视野范围内指定子区域对应的目标子阵列,进而仅将目标子阵列内各spad单元的深度数据存入存储单元,并基于所存储的深度数据,生成指定子区域的深度图。由于在进行探测之后,仅将目标子阵列内的spad单元的深度数据存入存储单元,而不是将spad阵列中所有的spad单元的深度数据都存入存储单元,使得存储单元所需存储的数据可以小于spad阵列中所有spad单元的深度数据,从而使得提高spad阵列的阵列规模,可以不用提高存储面积,从而可以避免数据存储对提高spad阵列的阵列规模的限制。
57、进一步的,由于spad阵列中目标子阵列与视野范围内指定子区域相对应,这意味着,在生成深度图时,仅生成指定子区域内的深度图,而无需生成视野范围内其他区域的深度图,从而可以减少每次生成深度图时所需的计算量。
58、当然,实施本发明的任一产品或方法并不一定需要同时达到以上所述的所有优点。
- 还没有人留言评论。精彩留言会获得点赞!