一种基于UWB的高精度室内外定位系统及其运用方法与流程
一种基于uwb的高精度室内外定位系统及其运用方法
技术领域
1.本发明涉及定位系统,具体是指一种基于uwb的高精度室内外定位系统及其运用方法。
背景技术:
2.定位技术各有不同特点,有些可直接用于手机定位,有些不行;有些需要在室内搭建定位基站,有些不需要;有些成本昂贵,有些几乎无额外成本;有些定位精确到毫米,有些比较粗犷;有些对环境适应性很广(室外室内、白天黑夜),有些对环境有特定要求。
3.超宽带(ultra wide band,uwb)技术是一种无线载波通信技术,它不采用正弦载波,而是利用纳秒级的非正弦波窄脉冲传输数据,因此其所占的频谱范围很宽。uwb技术具有系统复杂度低,发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点,尤其适用于室内等密集多径场所的高速无线接入。
技术实现要素:
4.本发明提供一种基于uwb的高精度室内外定位系统及其运用方法,其在发电厂、隧道、车辆定位、养老院、监狱、化工等需要位置感知的场景中具有十分重要的意义。相比传统定位或其他定位设备具有精度高、实施简便、能耗低、成本低的优点。
5.为解决上述技术问题,本发明提供的技术方案为:
6.一种基于uwb的高精度室内外定位系统,包括pc机、uwb模块、无线数传模块、图样采集模块及修改节点参数模块,所述pc机与uwb模块、无线数传模块、图样采集模块及修改节点参数模块均连接;
7.所述uwb模块共分为4个功能模块,分别为初始化模式、标定模式、信号质量评估模式和定位模式,所述初始化模式用于接收到初始化指令,当接收到初始化指令后,锚节点进入初始化状态,完成对uwb的初始化配置,所述标定模式对不同锚节点的自身差异进行标定,以便在定位算法中对不同节点补偿相应的误差值,所述信号质量评估模式评估锚节点布置是否合理,主要为参考节点向其他锚节点广播发送信号质量评估信息,所述定位模式实现各节点的同步和对标签的定位;
8.所述无线数传模块用于对标签进入危险区域警示以及接收标签发送的一键求救并上传给pc机的功能;
9.所述图像采集模块用于对指定区域的图像采集功能;
10.所述修改节点参数模块用于pc机对锚节点相关参数的在线修改。
11.作为改进,所述标定模式测量不同锚节点上的自身误差,使定位信息更加精确且同时进行多次测量,并取平均值。
12.一种基于uwb的高精度室内外定位系统的运用方法,包括以下具体方法:
13.初始化模式接收到初始化指令时,锚节点进入初始化状态,主要完成对uwb的初始化配置,当系统对uwb初始化完成后,将初始化完成标志返回pc机,若未完成将初始化未完
成标志返回pc机;
14.标定模式为对不同锚节点的自身差异进行标定,以便在定位算法中对不同节点补偿相应的误差值,接收到标定指令时,uwb进入标定模式,首先设置一个参考节点和一个待标定节点,标定模式下,参考节点向待标定节点间隔200us连发俩次标定信息后回到idle状态;待标定节点处于接收状态,在收到参考节点发送的俩次标定信息时,分别记录下这俩次的时间戳信息calib_time1和calib_time2后,将这俩次时间戳信息和对应的标定次数计数值calib_count通过网络接口返回到pc机;
15.信号质量评估为了评估锚节点布置是否合理,主要为参考节点向其他锚节点广播发送信号质量评估信息,接收到信号质量评估指令时,uwb进入信号质量评估模式,此时参考节点向其他各节点广播发送一定次数的信号质量评估信息,当其他锚节点接收到参考节点发送的信号质量评估信息时,各节点读取自身内部表示信号质量的寄存器,并将读取出来的值通过网络接口返回到pc机;
16.定位模式实现各节点的同步和对标签的定位,当工作在定位模式时,系统由参考节点和其他锚节点组成;参考节点向其他节点发送一次同步信息,定时器计数2ms开始,当计数2ms到后,若检测到停止定位指令,则停止定位,反之则继续向其它节点发送同步信息,定时器清零并重新开始计数,普通锚节点开始时进入接收参考节点的同步信息并定时计数2ms,若1ms内未接到同步信息,则定时器清零并重新进入同步,当普通锚节点接收到同步信息后,记录下同步的时间戳信息,记为同步时间sync_time,然后进入定位状态,时窗为1ms,在1ms内接收到标签信息,记录下接收到标签信息时的时间戳,记为定位时间 locate_time,并通过网络接口将sync_time,locate_time、标签id号、发送次数计数和参考节点id号打包发送给pc机,若未接到标签信息,则在定时器计数2ms到后,检测停止定位命令,若有,则停止定位,反之重新进入同步状态,定时器清零并重新开始计数;
17.无线数传模块主要实现对标签进入危险区域警示以及接收标签发送的一键求救并上传给pc机的功能;图像采集模块主要实现对指定区域的图像采集功能,修改节点参数模块该模块主要实现pc机对锚节点相关参数的在线修改。
18.作为改进,所述pc机通过网络接口来实现与锚节点的双向通信。通过固定长度的码表向锚节点发送 uwb初始化、标定、信号质量评估、定位、标签进入违规区域示警、采集图像、修改网络参数等指令;同时接收锚节点返回的应答信息来判断锚节点的工作状态并加以显示,以便来进行下一步的操作。
19.作为改进,所述pc机对uwb进行控制的指令主要包括初始化(0x01)、标定(0x02)、信号质量评估 (0x04)和定位(0x08)。一般先进行初始化指令,待锚节点返回初始化完成信息后,再进行其他三个指令操作。
20.作为改进,在标定过程中,pc机对参考节点和2号和3号待标定节点发送标定指令,通过2号和3号待标定节点返回的俩次接收时间戳calib_rxtime和calib_rxtime_again,计算出俩次时间戳的差值 calib_diff2=calib_rxtime_again-calib_rxtime,calib_diff3=calib_rxtime_again
‑ꢀ
calib_rxtime;选定2号为标准无误差的节点,则3号节点与2号节点的误差为 calib_diff
3-2
=calib_diff3-calib_diff2。
21.作为改进,所述信号质量评估指令有两个作用:一是通过锚节点接收到信息的质量来调整锚节点的分布位置,以获得更好的定位效果;二是锚节点在接收到定位信息时,通
过读取相关寄存器,判断接收到的是视距定位信息还是非视距定位信息,以便pc机在定位功能时可以更加有效的进行区分和解算,具体计算公式如下:
[0022][0023][0024]
将式(2.3)减去式(2.2),结果小于6db,一般是los;结果大于10db,一般是nlos。其中,a是常数,为121.74。
[0025]
采用以上结构后,本发明具有如下优点:
[0026]
本系统在发电厂、隧道、车辆定位、养老院、监狱、化工等需要位置感知的场景中具有十分重要的意义。相比传统定位或其他定位设备具有精度高、实施简便、能耗低、成本低的优点。
附图说明
[0027]
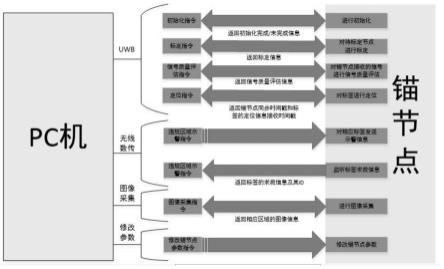
图1是本发明的锚节点系统工作框图。
[0028]
图2是本发明的初始化模式流程图。
[0029]
图3是本发明的标定模式流程图。
[0030]
图4是本发明的信号质量评估模式流程图。
[0031]
图5是本发明的定位模式流程图。
[0032]
图6是本发明的无线数传模块流程图。
[0033]
图7是本发明的图像采集模块流程图。
[0034]
图8是本发明的修改节点参数模块流程图。
[0035]
图9是本发明的初始化指令流程图。
[0036]
图10是本发明的标定指令流程图。
[0037]
图11是本发明的定位指令流程图。
[0038]
图12是本发明的违规区域示警指令流程图。
[0039]
图13是本发明的采集图像指令流程图。
具体实施方式
[0040]
下面结合附图对本发明做进一步的详细说明。
[0041]
结合附图1-13,一种基于uwb的高精度室内外定位系统的运用方法,具体系统框图如图1所示,包括:
[0042]
整个系统主要实现uwb定位功能、进入危险区域警示功能、一键求救功能、图像采集功能、修改锚节点网络参数功能;
[0043]
pc机与锚节点通过网络接口通信从而实现对整个系统功能的控制;
[0044]
当锚节点解析到pc机下发的指令为uwb定位指令集时,锚节点按照定位功能的流程进行工作。当锚节点解析到pc机下发的指令为uwb停止定位指令集时,锚节点停止定位功能;
[0045]
当锚节点解析到pc机下发的指令为发送警示信息指令时,锚节点通过无线模块对目标标签发送警示信息;
[0046]
当锚节点解析到pc机下发的指令为图像采集指令时,锚节点通过摄像头采集一幅图像信息并通过网口传输到pc机;
[0047]
当锚节点解析到pc机下发的指令为修改节点参数指令时,此时锚节点将重新配置该锚节点的节点参数,重新上电后修改的节点参数生效;
[0048]
同时,pc机还会实时监测有无标签发出求救信息,若检测到某标签求救,pc机会做出相应提示。
[0049]
具体操作方法:
[0050]
系统包括pc机、uwb模块、无线数传模块、图样采集模块及修改节点参数模块,所述pc机与uwb 模块、无线数传模块、图样采集模块及修改节点参数模块均连接。
[0051]
接收到初始化指令时,锚节点进入初始化状态,主要完成对uwb的初始化配置。当系统对uwb初始化完成后,将初始化完成标志返回pc机,若未完成将初始化未完成标志返回pc机。初始化模式流程图如图 2所示。
[0052]
标定模式为对不同锚节点的自身差异进行标定,以便在定位算法中对不同节点补偿相应的误差值。标定模式流程图如图3所示。
[0053]
接收到标定指令时,uwb进入标定模式,首先设置一个参考节点和一个待标定节点。标定模式下,参考节点向待标定节点间隔200us连发俩次标定信息后回到idle状态;待标定节点处于接收状态,在收到参考节点发送的俩次标定信息时,分别记录下这俩次的时间戳信息calib_time1和calib_time2后,将这俩次时间戳信息和对应的标定次数计数值calib_count通过网络接口返回到pc机。
[0054]
信号质量评估为了评估锚节点布置是否合理,主要为参考节点向其他锚节点广播发送信号质量评估信息。信号指令评估流程图如图4所示。
[0055]
接收到信号质量评估指令时,uwb进入信号质量评估模式,此时参考节点向其他各节点广播发送一定次数的信号质量评估信息,当其他锚节点接收到参考节点发送的信号质量评估信息时,各节点读取自身内部表示信号质量的寄存器,并将读取出来的值通过网络接口返回到pc机。
[0056]
定位模式实现各节点的同步和对标签的定位。定位模式流程图如图5所示,当工作在定位模式时,系统由参考节点和其他锚节点组成;参考节点向其他节点发送一次同步信息,定时器计数2ms开始,当计数 2ms到后,若检测到停止定位指令,则停止定位,反之则继续向其它节点发送同步信息,定时器清零并重新开始计数。普通锚节点开始时进入接收参考节点的同步信息并定时计数2ms,若1ms内未接到同步信息,则定时器清零并重新进入同步,当普通锚节点接收到同步信息后,记录下同步的时间戳信息,记为同步时间sync_time。然后进入定位状态,时窗为1ms,在1ms内接收到标签信息,记录下接收到标签信息时的时间戳,记为定位时间locate_time,并通过网络接口将sync_time,locate_time、标签id号、发送次数计数和参考节点id号打包发送给pc机,若未接到标签信息,则在定时器计数2ms到后,检测停止定位命令,若有,则停止定位,反之重新进入同步状态,定时器清零并重新开始计数。
[0057]
无线数传模块主要实现对标签进入危险区域警示以及接收标签发送的一键求救
并上传给pc机的功能。具体流程图如图6所示。
[0058]
图像采集模块主要实现对指定区域的图像采集功能,具体流程图如图7所示。
[0059]
修改节点参数模块主要实现pc机对锚节点相关参数的在线修改,具体流程图如图8所示。
[0060]
上位机部分主要通过网络接口来实现与锚节点的双向通信。通过固定长度的码表向锚节点发送uwb初 始化、标定、信号质量评估、定位、标签进入违规区域示警、采集图像、修改网络参数等指令;同时接收 锚节点返回的应答信息来判断锚节点的工作状态并加以显示,以便来进行下一步的操作。
[0061]
uwb控制指令设计
[0062]
上位机对uwb进行控制的指令主要包括初始化(0x01)、标定(0x02)、信号质量评估(0x04)和定位 (0x08)。一般先进行初始化指令,待锚节点返回初始化完成信息后,再进行其他三个指令操作。
[0063]
初始化指令设计
[0064]
初始化指令主要是对uwb进行一些必要的配置。在初始化过程中,pc机对一个区域内的所有锚节点发送初始化指令,若所有锚节点都返回初始化成功的信息,则该区域初始化完成,pc机将继续对下一个区域进行初始化。具体流程图如图9所示。
[0065]
标定指令主要是测量不同锚节点上的自身误差,使定位信息更加精确。在标定过程中,pc机对参考节点和2号和3号待标定节点发送标定指令,通过2号和3号待标定节点返回的俩次接收时间戳calib_rxtime 和calib_rxtime_again,计算出俩次时间戳的差值calib_diff2=calib_rxtime_again-calib_rxtime, calib_diff3=calib_rxtime_again-calib_rxtime;选定2号为标准无误差的节点,则3号节点与2 号节点的误差为calib_diff
3-2
=calib_diff3-calib_diff2;同时进行多次测量,并取平均值。具体流程图如图10所示。
[0066]
信号质量评估指令设计
[0067]
信号质量评估指令主要有俩个作用:一是通过锚节点接收到信息的质量来调整锚节点的分布位置,以获得更好的定位效果;二是锚节点在接收到定位信息时,通过读取相关寄存器,判断接收到的是视距定位信息还是非视距定位信息,以便上位机在定位功能时可以更加有效的进行区分和解算,具体计算公式如下:
[0068][0069][0070]
将式(2.3)减去式(2.2),结果小于6db,一般是los;结果大于10db,一般是nlos。其中,a是常数,为121.74,式中未知数与后续报文的对应关系如下表所示:
[0071]
未知数数据报文值f1fp_ampl1_o[15:0]f2fp_ampl_o[15:0]f3pp_ampl_o[15:0]
nrx_pacc_o[15:0]ccir_pwr_o[15:0]
[0072]
定位指令设计
[0073]
定位指令主要实现对某一区域内的标签进行精确定位的功能。pc机下发定位指令后,若普通锚节点无返回同步失败信息,则说明该区域的所有普通节点都进入定位状态,然后pc机在接收到不同锚节点发送的不同标签的定位信息后进行筛选解算,实现对标签的定位并在显示界面上显示,具体流程图如图11所示。
[0074]
违规区域示警指令设计
[0075]
pc机在监测到标签进入违规区域后,向该标签对应区域的锚节点发送违规区域示警指令;此外,pc 也可接收到标签的一键呼救信息。具体流程图如图12所示。
[0076]
采集图像指令设计
[0077]
当需要观察某一区域的情况时,pc机可以发送采集图像指令给该区域的锚节点,然后接收锚节点返回的图像信息并加以显示。具体流程图如图13所示.
[0078]
修改锚节点参数指令设计
[0079]
当需要修改锚节点的配置参数时,可以将修改的ip值、端口号以及节点id通过报文格式发送给锚节 点,然后待锚节点重新上电后修改后的参数值生效。
[0080]
主控网络接口
[0081]
3.1对锚节点配置指令报文
[0082]
pc机对锚节点指令配置格式如下表:
[0083]
[0084][0085]
锚节点对pc机上传数据报文
[0086]
锚节点对pc机上传数据报文格式如下表:
[0087]
[0088]
[0089][0090]
锚节点对pc机上传图像数据
[0091]
锚节点对pc机上传图像数据报文格式如下表:
[0092]
[0093][0094]
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1