一种用于变电站的巡检系统的制作方法
1.本实用新型涉及电力设备状态监测技术领域,尤其涉及一种用于变电站的巡检系统。
背景技术:
2.变电站是电力系统的核心枢纽,巡视站内设备是保证系统安全、设备安全运行的基本措施。随着电力系统稳定性的要求不断提高,人工巡视模式存在劳动强度大、任务重等缺点,凸显出不适应透明电网发展趋势的客观问题。
3.cn105548824a公开了一种电气设备局放源定位装置及定位方法,包括压差式矢量传感器、高频载波通信模块以及分析装置;所述压差式矢量传感器设置在电气设备绝缘油中,用于采集放电信息;所述高频载波通信模块用于将压差式矢量传感器传输的信息发送给分析装置;所述分析装置设置在控制室内,用于对压差式矢量传感器采集的信息进行分析,得出局放源的具体位置。只能小面积的对特定的电气设备进行监测,对于大面积的设备监测消耗成本较高,不能应对多变的环境。
4.cn111906796a公开了一种变电站巡检机器人,包括:底盘、机壳、移动装置、巡检装置、供电装置、主控装置以及安全行驶模块;移动装置包括移动轮装置以及与移动轮装置一一对应的转向装置;移动轮装置安装于底盘底部上;机壳可拆卸盖设于底盘顶部上,且与底盘之间形成安装腔室;转向装置安装于安装腔室内,且与移动轮装置连接,用于驱动移动轮装置转向;巡检装置安装于底盘上于转向装置之间位置,且伸出机壳外;安全行驶模块,用于检测并反馈安全行驶所需环境信息;供电装置,用于供电;主控装置分别与移动轮装置、转向装置、巡检装置、供电装置以及安全行驶模块电连接。在恶劣天气下易偏离航线;所处位置较低,监测范围有限;运行时容易遭到其它人员的破坏。
技术实现要素:
5.为克服上述缺陷,本实用新型的目的在于提供一种用于变电站的巡检系统,通过在高处设置闭合的运动轨道以及在变电站内设置中控站,增加巡检机器人的视野范围,不会受到外来入侵人员的损坏,提高安全保障,提高巡检机器人的计算效率,保障变电站监测的效果。
6.为实现上述目的,本实用新型采用如下技术方案:
7.一种用于变电站的巡检系统,包括巡检机器人、巡检轨道、中控站和监管平台,所述中控站、所述巡检机器人和巡检轨道都设置在待监测的变电站内;所述巡检轨道包括运动轨道和多个支撑柱,多个所述支撑柱沿变电站待监测区域的监测轨迹均匀分布;所述运动轨道设置在所述支撑柱的顶部,所述运动轨道首尾相连;所述巡检机器人包括底板、动力装置、图像监测装置、超声波监测装置、至少两个主动滚轮、至少两个从动滚轮、第一无线模块、第二无线模块和第三无线模块;所述从动滚轮与底板活动连接;所述图像监测装置设置在靠近所述从动滚轮的底板顶部,所述第一无线模块设置在所述图像监测装置内;所述动
力装置设置在远离所述从动滚轮的底板顶部,并与所述底板固定,所述第二无线模块位于所述动力装置内;所述主动滚轮位于所述动力装置的两侧,并互相对称,所述主动滚轮通过转轴与所述动力装置内的电机连接;所述从动滚轮和所述主动滚轮与所述运动轨道配合;所述超声波监测装置设置在所述动力装置的顶部,所述第三无线模块位于所述超声波监测装置内;所述中控站包括相互连接的主控模块、显示模块、报警模块、存储数据库和第四无线模块;所述第四无线模块分别与所述第一无线模块、所述第二无线模块、所述第三无线模块和所述监管平台无线连接。
8.可选的,所述底板呈t型,两个所述从动滚轮分别通过轴承和转轴活动连接在所述底板前部的两侧,转轴的方向呈竖直设置;所述动力装置的宽度大于所述底板的宽度,所述主动滚轮位于所述动力装置两侧的底部;所述运动轨道包括依次连接的上顶板、中支柱和下底板,所述上顶板和所述下底板互相平行;所述主动滚轮包括圆柱体的动力轮以及位于所述动力轮两侧的限位轮,所述限位轮直径大于所述动力轮,所述限位轮与转轴固定并通过转轴与所述电机传动连接,所述动力轮采用橡胶材质,外表面设置波浪花纹,所述动力轮的侧部与所述上顶板的侧部接触并配合滚动;所述从动滚轮和所述主动滚轮的形状和大小一致。
9.可选的,所述底板呈长方体,两个所述从动滚轮分别通过轴承和转轴活动连接在所述底板前部和后部的中间位置,转轴的方向呈水平设置;所述动力装置的宽度大于所述底板的宽度,所述主动滚轮位于所述动力装置两侧的底部;所述运动轨道包括依次连接的上顶板、中支柱和下底板,所述上顶板和所述下底板互相平行;所述主动滚轮包括圆柱体的动力轮以及位于所述动力轮两侧的限位轮,所述限位轮直径大于所述动力轮,所述限位轮与转轴固定并通过转轴与所述电机传动连接,所述动力轮采用橡胶材质,外表面设置波浪花纹,所述动力轮的侧部与所述上顶板的侧部接触并配合滚动。
10.可选的,所述图像监测装置包括固定在所述底板上的底座、固定在所述底座上的增高柱、固定在所述增高柱上的保护壳体、固定在所述保护壳体上的第一太阳能板以及固定在所述保护壳体侧部的摄像头;所属保护壳体为长方体,所述摄像头数量设置有四个,所述摄像头分别位于所述保护壳体的不同侧部;所述增高柱和所述底座内部空心,所述底座内设置有第一电池以及所述第一无线模块,通过电线并穿过所述增高柱与所述摄像头和所述第一太阳能板连接。
11.可选的,所述动力装置内设置有第二备用电池、控制模块、所述电机和所述第二无线模块,所述动力装置的顶部设置有第二太阳能板;所述控制模块与所述第二备用电池、所述电机以及所述第二无线模块连接;所述第二备用电池与所述第二太阳能板连接;所述电机与所述第二备用电池连接;所述动力装置通过l型固定板以及螺钉与所述底板固定连接。
12.可选的,所述超声波监测装置包括固定在所述动力装置顶部的超声波监测装置外壳以及设置在所述超声波监测装置外壳顶部的球形网罩;所述球形网罩内设置有多个在空间中呈三维阵列几何形状分布的声压传感器,所述声压传感器的数量大于20个,每个所述声压传感器之间的距离在5mm-8mm;所述超声波监测装置外壳内设置有处理模块、检测模块、存储模块和所述第三无线模块;所述处理模块与所述声压传感器连接,所述检测模块与所述处理模块连接,所述存储模块与所述检测模块连接,所述第三无线模块与所述存储模块连接。
13.可选的,包括维护阶梯,所述维护阶梯设置在任意两个所述支撑柱之间,位于所述运动轨道的一侧,高度与所述运动轨道对应;所述运动轨道包括至少一段活动轨道,所述活动轨道可拆卸,通过螺钉与所述运动轨道活动连接,位置对应所述维护阶梯。
14.一般的变电站巡检监控需要运维人员亲自进行异常检查和缺陷查找,且不具备对设备外观等缺陷的检测能力,大量巡视图像需要人工甄别,由于图像质量和图像分析水平不足的问题,难以有效发现设备隐患,监测效率低下;一些变电站还会使用巡检机器人自动巡检,按照设定的航线进行巡检,但是巡检机器人容易出轨偏移航线,如定位系统发生故障和遇到大风等极端天气,需要人工进行复位,非常麻烦,而且巡检机器人的摄像头高度受限,不易过高,不然会导致机器人行走不稳定而倾倒,所以对于巡检机器人的视野受限,对于高处的变电站设备问题不能有效的进行监控;还有控制机器人的监管平台较远,无线传输数据以及指令会有延迟,不能很好的实时监测。
15.本实用新型的积极有益效果:运动轨道通过支撑柱设置在高处,巡检机器人在运动轨道上运动并巡检,增加巡检机器人的视野范围,而且不会受到外来入侵人员的损坏,提高安全保障,提高变电站监测的效果;运动轨道首尾相连,巡检机器人可以根据轨道的轨迹做循环运动,无需人员干预调整方向,而且轨道对巡检机器人也能进行一定的限位作用,在大风天气下也不会偏移轨道。图像监测装置获取变电站的图像信息进行监控;超声波监测装置用于定位变电站内电力设备高压放电的位置,如变压器等,在发生高压放电时会产生超声波,长期会对电气设备造成损害以及发生事故;第一无线模块用于无线传输图像监测装置获取的变电站图像视频数据,第二无线模块用于无线接收无线传输的命令指令,运维人员可以通过显示模块手动并控制动力装置内电机的启动或关闭等操作,第三无线模块用于无线传输超声波监测装置获取的高压放电信息;由于需要处理分析的数据信息较多,中控站作为信息中转站设置在变电站内,与巡检机器人的距离较近,数据交换较快,在处理、计算和分析获取的图像视频数据上效率更高,主控模块用于对图像监测装置获取变电站的图像信息进行预处理、计算和分析,与存储数据库预存的数据进行比对,判断当前设备是否有安全隐患、潜在故障或有无外来人员入侵,通过报警模块警报,以及第四无线模块与远处的监管平台发送报警信息,监管平台能收到不同变电站中控站的报警信息,集中管控,及时提醒监管人员做出应对的措施,提高计算效率。
附图说明
16.图1是本实用新型的实施例1提供的一种巡检机器人、中控站和监管平台的示意框图;
17.图2是本实用新型的实施例1提供的一种巡检轨道的局部结构示意图;
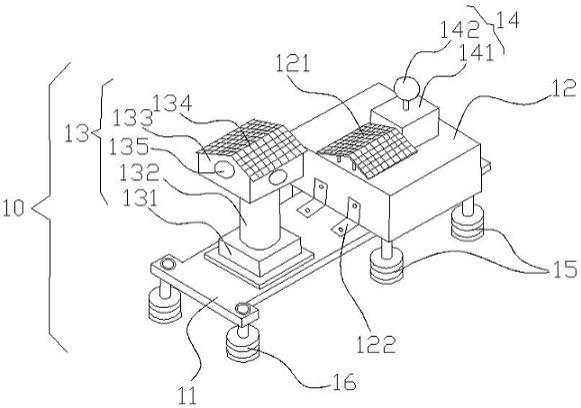
18.图3是本实用新型的实施例1提供的一种巡检机器人的结构示意图;
19.图4是本实用新型的实施例1提供的一种主动滚轮的结构示意图;
20.图5是本实用新型的实施例1提供的一种球形网罩以及内部的声压传感器阵列的结构示意图;
21.图6是本实用新型的实施例1提供的一种维护阶梯以及可拆卸运动轨道的局部结构示意图;
22.图7是本实用新型的实施例1提供的一种拆卸掉活动轨道的运动轨道的局部结构
示意图;
23.图8是本实用新型的实施例1提供的一种活动轨道的结构示意图;
24.图9是本实用新型的实施例1提供的一种巡检轨道的轨迹分布示意图;
25.图10是本实用新型的实施例1提供的另一种巡检轨道的轨迹分布示意图;
26.图11是本实用新型的实施例2提供的一种巡检机器人的结构示意图。
27.10、巡检机器人;11、底板;12、动力装置;121、第二太阳能板;122、l型固定板;13、图像监测装置;131、底座;132、增高柱;133、保护壳体;134、第一太阳能板;135、摄像头;14、超声波监测装置;141、超声波监测装置外壳;142、球形网罩;143、骨架;144、声压传感器;15、主动滚轮;151、动力轮;152、限位轮;16、从动滚轮;20、巡检轨道;21、运动轨道;211、上顶板;212、中支柱;213、下底板;22、支撑柱;23、活动轨道;30、维护阶梯;40、矩形通槽。
具体实施方式
28.下面结合一些具体实施方式,对本实用新型做进一步说明。
29.实施例1
30.如图1至图8所示,一种用于变电站的巡检系统,包括巡检机器人10、巡检轨道20、中控站和监管平台,所述中控站、所述巡检机器人10和巡检轨道20都设置在待监测的变电站内;所述巡检轨道20包括运动轨道21和多个支撑柱22,多个所述支撑柱22沿变电站待监测区域的监测轨迹均匀分布;所述运动轨道21设置在所述支撑柱22的顶部,所述运动轨道21首尾相连;所述巡检机器人10包括底板11、动力装置12、图像监测装置13、超声波监测装置14、至少两个主动滚轮15、至少两个从动滚轮16、第一无线模块、第二无线模块和第三无线模块;所述从动滚轮16与底板11活动连接;所述图像监测装置13设置在靠近所述从动滚轮16的底板11顶部,所述第一无线模块设置在所述图像监测装置13内;所述动力装置12设置在远离所述从动滚轮16的底板11顶部,并与所述底板11固定,所述第二无线模块位于所述动力装置12内;所述主动滚轮15位于所述动力装置12的两侧,并互相对称,所述主动滚轮15通过转轴与所述动力装置12内的电机连接;所述从动滚轮16和所述主动滚轮15与所述运动轨道21配合;所述超声波监测装置14设置在所述动力装置12的顶部,所述第三无线模块位于所述超声波监测装置14内;所述中控站包括相互连接的主控模块、显示模块、报警模块、存储数据库和第四无线模块;所述第四无线模块分别与所述第一无线模块、所述第二无线模块、所述第三无线模块和所述监管平台无线连接。
31.支撑柱22的高度根据待监测变电站内的设备高度等因素确定,支撑柱22用于支撑运动轨道21,每间隔一段距离设置一个,以保证运动轨道21的稳定性;运动轨道21通过支撑柱22设置在高处,巡检机器人10在运动轨道21上运动并巡检,增加巡检机器人10的视野范围,提高变电站监测的效果;运动轨道21首尾相连,巡检机器人10可以根据轨道的轨迹做循环运动,无需人员干预调整方向,而且轨道对巡检机器人10也能进行一定的限位作用,在大风天气下也不会偏移轨道。巡检机器人10通过动力装置12和主动滚轮15提供动力,从动滚轮16增加支点,提高整体的稳定性,防止机器人倾倒;图像监测装置13获取变电站的图像信息进行监控;超声波监测装置14用于定位变电站内电力设备高压放电的位置,如变压器等,在发生高压放电时会产生超声波,长期会对电气设备造成损害以及发生事故;第一无线模块用于无线传输图像监测装置13获取的变电站图像视频数据,第二无线模块用于无线接收
无线传输的命令指令,运维人员可以通过显示模块手动并控制动力装置12内电机的启动或关闭等操作,显示模块包括触控液晶屏和控制按键等,第三无线模块用于无线传输超声波监测装置14获取的高压放电信息;由于需要处理分析的数据信息较多,中控站作为信息中转站设置在变电站内,与巡检机器人10的距离较近,无线信号强,数据交换较快,在处理、计算和分析获取的图像视频数据上效率更高,主控模块用于对图像监测装置13获取变电站的图像信息进行预处理、计算和分析,与存储数据库预存的数据进行比对,判断当前设备是否有安全隐患、潜在故障或有无外来人员入侵,通过报警模块警报,以及第四无线模块与远处的监管平台发送报警信息,监管平台一般距离变电站很远,监管多个变电站,监管平台能收到不同变电站中控站的报警信息,集中管控,及时提醒监管人员做出应对的措施,提高计算效率。
32.具体的,参考图3和图7,所述底板11呈t型,两个所述从动滚轮16分别通过轴承和转轴活动连接在所述底板11前部的两侧,转轴的方向呈竖直设置;所述动力装置12的宽度大于所述底板11的宽度,所述主动滚轮15位于所述动力装置12两侧的底部;所述运动轨道21包括依次连接的上顶板211、中支柱212和下底板213,所述上顶板211和所述下底板213互相平行;所述主动滚轮15包括圆柱体的动力轮151以及位于所述动力轮151两侧的限位轮152,所述限位轮152直径大于所述动力轮151,所述限位轮152与转轴固定并通过转轴与所述电机传动连接,所述动力轮151采用橡胶材质,外表面设置波浪花纹,所述动力轮151的侧部与所述上顶板211的侧部接触并配合滚动;所述从动滚轮16和所述主动滚轮15的形状和大小一致。参考图4,主动滚轮15、从动滚轮16和运动轨道21的横截面都是“工”型,主动滚轮15和从动滚轮16中间的凹槽部吃住运动轨道21的上顶板211边沿,上顶板211的边沿与主动滚轮15中间的动力轮151接触并配合,实现滚动传输动力,橡胶材质和波浪花纹能提高与上顶板211的摩擦力,防止打滑。限位轮152限位主动滚轮15的位置,防止主动滚轮15脱轨,即使在大风天气也不会偏离航线轨道。从动滚轮16除了转轴不具有动力,其它原理与主动滚轮15一致,主要用作支撑底板11的前端,防止巡检机器人10倾斜。
33.参考图3,所述图像监测装置13包括固定在所述底板11上的底座131、固定在所述底座131上的增高柱132、固定在所述增高柱132上的保护壳体133、固定在所述保护壳体133上的第一太阳能板134以及固定在所述保护壳体133侧部的摄像头135;所属保护壳体133为长方体,所述摄像头135数量设置有四个,所述摄像头135分别位于所述保护壳体133的不同侧部;所述增高柱132和所述底座131内部空心,所述底座131内设置有第一电池以及所述第一无线模块,通过电线并穿过所述增高柱132与所述摄像头135和所述第一太阳能板134连接。四个摄像头135的图像摄取部分别位于保护壳体133的前后左右侧,保护壳体133的高度高于底板11后方的动力装置12和超声波监测装置14的总高度,利于保护壳体133后方摄像头135的图像摄取,提高对待监测变电站内的视野监控范围,提高设备安全保障。第一太阳能板134与第一电池连接,可以在光照充足的情况下为第一电池充电,提高巡检机器人10的续航能力;第一无线模块将监控到的视频图像数据传输到近处的中控站用于边缘计算的预处理、计算和分析,快速判断变电站的安全。
34.所述动力装置12内设置有第二备用电池、控制模块、所述电机和所述第二无线模块,所述动力装置12的顶部设置有第二太阳能板121;所述控制模块与所述第二备用电池、所述电机以及所述第二无线模块连接;所述第二备用电池与所述第二太阳能板121连接;所
述电机与所述第二备用电池连接;所述动力装置12通过l型固定板122以及螺钉与所述底板11固定连接,提高结构稳定性。第二备用电池主要作为动力装置12和顶部超声波监测装置14的能源,在光线好的时候可以通过第二太阳能板121进行充电,提高续航能力,第二无线模块向控制模块和中控站交换数据信息,控制模块可以控制电机。
35.参考图3和图5,所述超声波监测装置14包括固定在所述动力装置12顶部的超声波监测装置外壳141以及设置在所述超声波监测装置外壳141顶部的球形网罩142;所述球形网罩142内设置有多个在空间中呈三维阵列几何形状分布的声压传感器144,多个声压传感器144分别固定在所述球形网罩142内的骨架143上,所述声压传感器144的数量大于20个,每个所述声压传感器144之间的距离在5mm-8mm;所述超声波监测装置外壳141内设置有处理模块、检测模块、存储模块和所述第三无线模块;所述处理模块与所述声压传感器144连接,所述检测模块与所述处理模块连接,所述存储模块与所述检测模块连接,所述第三无线模块与所述存储模块连接。
36.立体阵列可以对三维空间内的声源目标进行定位,通过阵列处理技术可以使在三维空间中按一定顺序排列的声压传感器144接收到包含传感器阵列信息的信号进行处理,定位准确度较高,声压传感器144阵列中的每个声压传感器144的位置向量方向不同,位置向量是线性无关的,从而能够很好的避免重复空间采样,抑制混叠效应,有效减少鬼影的出现,精准获取目标的达方位角实现局部放电信号的定位,对目标信号进行精确测量;其中,再利用波束形成技术实现空间滤波,使得处理模块在提取有用信号的同时降低背景噪声抑制其它方向的干扰,处理模块可以实现对多变环境下的强噪声干扰过滤,获取电传声波阵元对电气弱声源的识别,当干扰信号和目标信号处于同一频段时,时域滤波的方式无法去除干扰,只能利用空域信息来进行空间滤波;经过检测模块确定信号的空域参数和信源位置,存储模块对处理和分析的这些数据进行存储,可供运维人员或检测模块后续的分析和处理,判断是否为电力设备的高压放电超声波以及方位。不同声压传感器144阵列的排布选择不同的间距,提高超声波测量精度,声压传感器144之间的距离越大,声达时间差就越大,在采样频率一定的情况下,可以降低系统误差,呈不规则三维阵列分布的第一声压传感器144的监测精度较高。
37.其中,处理模块所解决的声源检测采用akaike information criterion(赤池信息量准则),用最小化一个关于带噪信号相关矩阵中噪声特征值的函数的方法;检测模块所解决的参数估计,所述参数估计包括估计信源、信道和波达方向(doa)的参数,doa是指空间信号的到达方向,即各个信号到达阵列阵元的方向角,采用高分辨率谱估计的方法,比如esprit算法或music算法,通过找到最大功率的放电超声波方向,也可用相关延时估计算法;通过空间中不同位置接收到的信号的强度来进行成像显示。第三无线模块向中控站无线传输高压放电超声波的放电信息和位置信息。
38.进一步的,如图6至图8所示,变电站的巡检系统还包括维护阶梯30,所述维护阶梯30设置在任意两个所述支撑柱22之间,位于所述运动轨道21的一侧,高度与所述运动轨道21对应;所述运动轨道21包括至少一段活动轨道23,所述活动轨道23可拆卸,通过螺钉与所述运动轨道21活动连接,位置对应所述维护阶梯30。在巡检机器人10需要返厂维修或更换零部件等操作时需要将其从运动轨道21上取下,活动轨道23原本就是运动轨道21的一部分,可以从运动轨道21上拆卸,当巡检机器人10运动到活动轨道23这部分时,将其取出,活
动轨道23的长度大于所述巡检机器人10的总长,运维人员可以通过维护阶梯30上到活动轨道23的附近进行拆装工作,维护阶梯30两侧可以设置围栏,提高人身安全保障;活动轨道23的顶部两端设置有通孔,通过螺钉与运动轨道21顶部上的螺纹孔活动连接;活动轨道23由上至下呈阶梯状,顶部较长,中间部分较短,可以压在运动轨道21上获得支撑力,减轻螺钉的负担,提高结构稳定性,在安装时从运动轨道21侧部取出或进入,安全方便。如图9和图10所示,巡检轨道20的运动轨迹形状没有限制,具体按所监测的变电站内电气设备和环境的分布来设置,巡检轨道在需要变换方向的边界处设置一定的弧度,方便巡检机器人平稳拐弯。
39.实施例2
40.如图11所示,所述底板11呈长方体,两个所述从动滚轮16分别通过轴承和转轴活动连接在所述底板11前部和后部的中间位置,转轴的方向呈水平设置;所述动力装置12的宽度大于所述底板11的宽度,所述主动滚轮15位于所述动力装置12两侧的底部;所述运动轨道21包括依次连接的上顶板211、中支柱212和下底板213,所述上顶板211和所述下底板213互相平行;所述主动滚轮15包括圆柱体的动力轮151以及位于所述动力轮151两侧的限位轮152,所述限位轮152直径大于所述动力轮151,所述限位轮152与转轴固定并通过转轴与所述电机传动连接,所述动力轮151采用橡胶材质,外表面设置波浪花纹,所述动力轮151的侧部与所述上顶板211的侧部接触并配合滚动。
41.主动滚轮15和运动轨道21的横截面都是“工”型,从动滚轮16呈圆柱体;主动滚轮15中间的凹槽部吃住运动轨道21的上顶板211边沿,上顶板211的边沿与主动滚轮15中间的动力轮151接触并配合,实现滚动传输动力,橡胶材质和波浪花纹能提高与上顶板211的摩擦力,防止打滑。限位轮152限位主动滚轮15的位置,防止主动滚轮15脱轨,即使在大风天气也不会偏离航线轨道。底板11前部和后部的中间位置设置有放置从动滚轮16的矩形通槽40,从动滚轮16的转轴设置在所述矩形通槽40内,方向呈水平设置,从滚滚轮主要用作支撑底板11的前端和后端,防止底板11或者防止限位轮152的底面接触运动轨道21的顶面,减少摩擦阻力。
42.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,本领域普通技术人员对本实用新型的技术方案所做的其他修改或者等同替换,只要不脱离本实用新型技术方案的精神和范围,均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1