投影机系统的制作方法
1.本实用新型是关于一种投影机系统,特别涉及一种投影机系统无须产生图案(pattern)或定位坐标而执行自动梯形校正的投影机系统。
背景技术:
2.随着科技的进步,各类型投影(微投影)技术因应科技的演化,提高了其应用的灵活性与机动性。大画面、高解析度、轻薄不受限空间而携带方便的投影技术,已与生活密不可分。上述投影技术扩展了其在家庭及公共领域应用的无限可能的同时,然而其在室内外的应用皆可能因受限于周遭环境或常态的移动架设而造成水平及垂直画面偏转,产生如梯形般的画面失真。其中尤以短焦系统最为严重,当展开的视场(field of view,fov)角度越大,在调整上会因其细腻的变化而变得愈困难。
3.除了手动调整外,目前部分投影机已具备自动校正的方法。传统使用的自动校正的方法是利用产生图像定位坐标的方式,经由分离式(例如手机)摄像头或是固定于投影机的摄像头取得矩形偏移坐标,再计算四角点修正来完成。但是,此方法执行效率不佳,易受环境背景光影响,甚至有边框条件或投影幕材质的限制,自动校正的精确度往往受到外在环境影响而造成其品质不稳定,使得定位条件复杂且成本高。使用固定摄像头的投影机运用于微投影技术时更是困难,因其受限于镜头与摄像头不得取于同一个fov夹角的限制,于相对短的夹角其解析度必须提升,成本因素造成普及困难。
技术实现要素:
4.鉴于上述的问题,本实用新型提出一种具有全自动的画面校正的投影机系统,投影机系统被配置为:利用扫描式多点飞行时间(tof)测距元件以及重力感测元件,以该飞行时间(tof)测距元件取得该投影机系统投影至一平面的全视场坐标作为第一基准画面;利用该重力感测元件补偿动态扫描的时间差,作为校正该投影机系统的水平与垂直移动时视场扫描线因该时间差造成的错误;以及利用固定视场角度的方式环绕该基准画面的水平与垂直对称轴取得建构线,达到快速的动态的梯形校正。投影机系统设计后仅为一微小模组,无须摄像头且不受装设fov角度限制,装设于同一投影机本体上,不易受环境或是背景光源、或凹凸不平墙面的影响,无须边框且无投影幕的限制。该方法结合重力感测器与飞行时间(time of flight,tof)测距元件,精算相对垂直于法线的误差予以修正;并可在移动定点后,以小于0.3sec完成一次调整的速度,动态微幅调整至最佳位置,不再因产生的图像遮蔽画面,而需反复施作调整。
5.本实用新型另一实施例为应用于超短焦投影机的实施例,用以克服tof测距装置在短距离取fov线会产生较大误差率的问题,其是利用倾斜水平与垂直角度于投影机的安装方式,维持固定fov的水平与垂直角度,放大对角线的差异比率,可补偿超短焦投影机于正投画面的fov误差率并达到与一般焦距相同准确的功效。
6.为达上述fov垂直或全部调整的目的,本实用新型的实施例提出一种包括单一投
影机、投影平面以及本实用新型开发的处理器。单投影机可以投射任意角度方向影像,本实用新型开发的处理器计算投影机投影画面fov的水平与垂直法线夹角。取处理器与投影机方向基于同一垂直与水平旋转的轴点,侦测同步投影成像的梯形变形量,以使处理器调整后的变形修正达到正矩形的目的,并保持原有的长宽比例。
7.本实用新型核心为取得视场(fov)梯形变形后的水平与垂直偏移,可应用于任何焦距长度(含超短焦)及光源种类的投影技术,且具有梯形修正的系统,可以直接结合,无须再增加其他定位或读取坐标的装置,即可于一投影平面完成梯形的校正。处理器启动时间约数秒即可完成第一次定位,并可起始循环动态与静态侦测,对于投影机使用过程、或投影机使用前的架设或环境需求的预设置步骤,将无须任何人工介入,可以达到全自动校正的目的。本实用新型包含可使用九轴(三轴加速度、三轴角速度及三轴磁力计)的重力感测器实现,导入包含三轴磁力计算法,求得对于欧拉角(euler angle)变化率和角速度的影响,建构出适应环境变化的侦测,达到近似指北针效果的定向投影功能,可配合输出转动量于云端平台,应用于展览会馆或移动载具中使用。
8.此些优点及其他优点从以下较佳实施例的叙述及权利要求将使读者得以清楚了解本实用新型。
附图说明
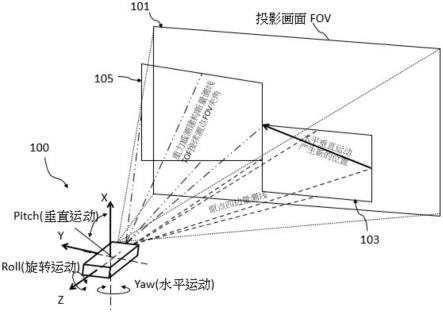
9.图1显示本实用新型的动态偏移系统图;
10.图2显示本实用新型所提出的动态校正原理示意图;
11.图3显示本实用新型所提出的去抖动的原理示意图;
12.图4显示本实用新型的硬件系统功能方块图;
13.图5显示本实用新型的系统程序流程图。
14.符号说明
15.100 投影机系统
16.101 投影画面
17.103 第一成像视场
18.105 第二成像视场
19.211、212、213、214、215 取样线
20.310、310a、311a、312a、310b、311b、312b 运动强度变化线
21.420 微控制器
22.422 电位转换装置
23.424 tof感测器
24.426 重力感测器
25.428 稳压器
26.500 流程图
27.501、503、505、506、507、509、511、513、517 步骤
具体实施方式
28.现在将对本实用新型不同的实施方式进行说明。下列描述提供本实用新型特定的
施行细节,以使阅者彻底了解这些实施例的实行方式。然本领域技术人员须了解本实用新型亦可在不具备这些细节的条件下实行。此外,文中不会对一些已熟知的结构或功能或是作细节描述,以避免各种实施例间不必要相关描述的混淆,以下描述中使用的术语将以最广义的合理方式解释,即使其与本实用新型某特定实施例的细节描述一起使用。
29.图1显示本实用新型的动态偏移系统图,本实用新型的处理器固定装置于投影机投影成像系统上,投影机投影成像系统内设置有投影所需的硬件例如光源、镜面等光学系统以及重力感测器(已经整合加速度计accelerometer与陀螺仪gyro)以及相关控制电路,因此当系统的处理器固定设置于投影机投影成像系统上即整合为一投影机系统100,其具有同一区域坐标系(local coordinate system),该坐标系可以依据重力感测器设置方位定义出三轴方向(x、y、z方向)以及俯仰角(pitch)、偏航角(yaw)以及滚转角(roll)。投影系统包括投影机、处理器、可成像的平面,其中可成像的平面可为墙面、投影幕、凸面的壁纸/装潢材质、或其他适于观赏投影画面101的较平整平面。这里首要考虑的情况是,当投影机系统因倾斜以及震动而造成水平及垂直画面偏转,产生如梯形般的画面失真,投影机系统如何进行修正。这里提出包含静态、静态转动态以及动态转静态等修正方式,利用结合重力感测器与飞行时间(time of flight,tof)测距元件,精算相对垂直于法线的误差予以修正;并可在移动定点后,以小于0.3sec完成一次调整的速度,动态微幅调整至最佳位置,不再因产生的图像遮蔽画面,而需反复施作调整。投影机系统(处理器)的第一成像视场(field of view,fov)103表示为前一动态或静态取得的fov,取样四边测量长度(即图示中所注记的原点四边量测线)可得水平与垂直的夹角;投影机系统(处理器)第二成像视场(fov)105表示后一动态或静态取得的fov,其中动态取得的fov由重力感测(包含三轴线加速度以及三轴线角速度)计算欧拉角(euler angle)变化率以及姿态四元数以建构新的量测线,然后tof测距元件接续测点取得四边测量长度以及fov固定夹角,在连续的动态行为中反复施作,以一较佳实施例而言,上述tof测距元件可以是一个扫描式多点tof测距元件。以一较佳实施例而言,本实用新型的投影机系统可以与是任一形式的投影机结合,例如,镭射投影机、数字光学处理投影机、短焦投影机或其他形式的投影机。其他具有平面成像或定位的设备亦可以应用于本实用新型的投影机系统。针对投影机的应用上,本实用新型投影机系统通常设置一单一处理器,如需要较大的投影涵盖范围或是于超短焦投影机需要更精确微调时,可装设多个处理器。以一较佳实施例而言,本实用新型的处理器可以是电脑中央处理装置、微处理器、逻辑运算单元(fpga)、亦可整合于投影机内,例如内建scalar具嵌入式微处理微运算处理单元。以一较佳实施例而言,任何合理的整合重力感测器结合tof测距元件的投影机技术或是硬件,相关等同变更都属于本实用新型所揭露的投影机系统的范畴。
30.图2显示本实用新型所提出的动态校正原理示意图,其揭示本实用新型在处理移动曲线的变化,动态校正原理示意图是基于本实用新型的投影机系统(处理器与投影机)定轴于相同的三轴法线上,使投影画面的fov矩形变化为相等量,因此描绘于同一成像面上表示。本实用新型的重点在于开始并完成第一成像定位后,投影机或装置位移运作,经过防颤抖运算排除误动作后,即时动态计算、测距线取样、并补偿时间差达到即时修正的效果,并于装置稳定投射角后精确修正,经由tof取得周边线与中心点绝对距离,计算在固定夹角差内的全展开、中心点至四点展开的精确角度修正,获得投影机系统的处理器与投影面的水
平与垂直夹角。相关防抖动运算将于图3详述。
31.于图2中,投影机系统100的水平与垂直移动表示为由第一成像视场103往第二成像视场105方向偏移,图式中显示在固定时间于水平与垂直测得五条取样线(211、212、213、214、215),并分别计算欧拉角(euler angle)变化率取得俯仰角(pitch)以及偏航角(yaw)方向的旋转角度,以第一成像视角为原点,动态改变每一取样线的水平与垂直变化。取样线为连续时间动作,端视时间动作延伸,并无取样线数的限制。结合图1与图2所示,本实用新型的技术要点为先静态后动态且无尽循环自动补足的fov角度校正系统的呈现,其中静态转动态的侦测是以重力感测器(g sensor)为主,可以补足tof测距元件进行移动测量所导致的精确度失真的不可靠性问题;动态恢复静态对实时(real time)投影面的fov成像是以tof测距元件测量四边与中心线来修正水平与垂直方向的最终夹角,最终获得去梯形化并保持投影长宽比。任何利用合理变换欧拉角(euler angle)变化率达到水平与垂直方向夹角的累计与角度修正关系的方式,都属于本实用新型所揭露的范畴。
32.图3为本实用新型所提出的去抖动的原理示意图,阐述于球状局限时间运动空间(相位空间)中,内容主要显示的概念为利用计算重力感测的欧拉角速度,三轴运动(即x、y、z方向运动)在一时间段内(period of time)围绕运动核心、感测器受外力刺激而产生位移量的变化,形成加速度与重力值的变化,进而算出俯仰角(pitch)、偏航角(yaw)以及滚转角(roll)三个运动角度(其中,于坐标系中pitch对应于θ、yaw对应于roll对应于φ)与强度。图3(a)为针对三轴的运动强度以及对应坐标系进行说明,图示中显示了俯仰角(pitch)、偏航角(yaw)以及滚转角(roll)三个运动角度与三轴的对应关系;其中,原点表示运动核心,垂直运动欧拉角即表示俯仰方向(pitch)角度变化率、水平运动欧拉角即表示偏航方向(yaw)角度变化率、而侧向旋转欧拉角即表示滚转方向(roll)角度变化率;圆球边界外部即表示局限时间运动空间中无效抖动范围,即表示圆球形边界外部为有效运动。图3(b)显示针对单轴的运动强度随时间演化的说明,以水平运动为例(偏航方向(yaw)角度变化率),其中由运动核心向外扩展的虚线同心圆表示由起始时间轴线to向外以一固定时间刻度δt的位移增量δr,而δt与重力感测器设置反应时间频率有关。图示中的运动强度变化线310显示水平运动于最长时间轴线截止时(相同于图3(a)所显示的时空边界),未大于最大运动强度,于运算时将累计至此的轴线归零计数。另外,考虑正常移动具有连续性以及于三轴方向(x、y、z方向)各自呈现单调递增/递减(monotonic increasing/decreasing)的单调函数(monotonic function)特性,而抖动运动具有于三轴方向(x、y、z方向)各自呈现反复的非单调函数(non-monotonic function)特性,将重力产生的影响融入计算可得到在一时间段(period of time)运动的三个方向的正负抵消作用,由此可以更为可靠的判别抖动与运动之间的区别,防止误动作产生。判别方式请参见图3(c)-(d),其中图3(c)为针对抖动的判别,图3(c)中绘出水平运动、侧向运动以及垂直运动的运动强度变化线(分别表示为310a、311a、312a),利用欧拉(euler)防抖动-三轴融合演算法于水平运动不为零时开始计量;起始计算至第二阶时侧向运动不为零,加入至该时间计量;接着起始计算至第四阶时垂直运动不为零,加入至该时间计量;当达到时间轴线动强度标线前,三个运动方向都开始反转,结束此循环,融合演算归零。图3(d)为针对运动的判别,图3(d)中绘出水平运动、侧向运动以及垂直运动的运动强度变化线(分别表示为310b、311b、312b),利用欧拉(euler)防抖动-三轴融合演算法于侧向运动不为零时开始计量;起始计算至第二阶时水平运动不为零,
加入至该时间计量;接着起始计算至第四阶时垂直运动不为零,加入至该时间计量;水平运动超量稳定增加(运动强度变化线310b),重订垂直运动为起点,从第二阶增加二阶模拟阶层;水平运动达稳定增加条件,此循环判读有效。以上判别方式的描述,可以总结为利用欧拉角速度于一时间段内进行环境变换计算,经由判断该环境变换计算的俯仰角(pitch)、偏航角(yaw)以及滚转角(roll)转动变化量,可以预设防抖动的强度门槛于该时间段内数次演变的结果,达到防抖动的目的。此一计算方法在稳定性与可靠度方面的展现,远较传统上利用设置阈(threshold)于重力感测器、陀螺仪、或加速度计上所估计的偏压值更为精确,并且不会产生因低于阈值被排除计算而导致的单笔(或数笔)数据累计的误差。采用六轴(三轴加速度、三轴陀螺仪)以及九轴的重力感测器(九轴即原先六轴加上三轴磁力计)必具备上述鉴别抖动的效能,本实用新型的处理器可以明确揭露此范畴。
33.图4为本实用新型的硬件系统功能方块图,主运算单元为一可程序逻辑微控制器420,其以i2c标准协定经电位转换装置422,并联tof感测器(测距元件)424以及重力感测器(g sensor)426,供电设计由低压线性稳压器(low dropout linear regulator,ldo)428提供感测器核心电压(感测器为低压驱动设计,经ldo稳压及后级滤波,更干净的电源及抑制电杂讯、涟波给予感测器稳定的工作环境)。对投影机或其他应用设备的通讯,本实用新型采用rs232以及预留rs485两种方式,rs232为投影机常用的内部与外部的通讯接口,便利与系统结合以及商品开发效率提升,rs485则为半双工的差动讯号,适用于大型的剧场平台,可支持较长距离的装设于投影机外挂装置使用。
34.图5为本实用新型的系统程序流程图500,以开机自动完成重力感测器的自动校正(g sensor auto-calibration)为第一程序(步骤501),欧拉角(euler angle)变化率的初始化(步骤503)并开始原点侦测的前置防抖动循环侦测(步骤505
→
506
→
507),当排除抖动条件成立,判定为有效欧拉角变化率(步骤509),执行融合三轴角度偏移原始计算(步骤511),并取偏移后的中心线于原点至投影机的合理回旋半径,换算此次偏移角度的最大与最小合理范围(中心线取值累计时间公差于防抖动侦测的计算截止点)(步骤513),如判定为理想的偏移角度(步骤514),则累计三轴的偏移量至新的坐标位置(步骤515),再继续循环防抖动侦测(步骤507)。如否,判定为超量的偏移角度,可能是机台摔落、被携行、转移场地架设或是其他因素影响的环境变动,则重置姿态四元数并重新检查是否为移动中(步骤517),在于新的定位点取得重新定位。本实用新型的系统紧密结合与欧拉角变化率所影响层面的操作方法来设计,任何合理的动态、静态或环境转换使用欧拉角变化率于投影机完成的方法,都属于本实用新型所揭露的范畴。
35.综上所述,本实用新型描述了一种与投影机结合的系统,较传统手动方法或是坐标定位方法更彰显效率,除本实用新型的处理器外,无须增添其他具有定位感测的设备,校正过程不会产生任何遮蔽画面的图案,投影机无须装设摄像头,无需于使用前进行架设或因环境改变装设任何扫描/定位装置,可以随放随用,并可于静态置放后,进行微幅或极微幅动态调整,并使调整过程的投影画面所显示影像与框架均符合预定的投影范围。
36.本实用新型并未局限在此处所描述的特定细节特征。在本实用新型的精神与范畴下,与先前描述与附图相关的许多不同的实用新型变更是可被允许的。因此,本实用新型将由权利要求书来包含其所可能的修改变更,而非由以上描述来界定本实用新型的范畴。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1