一种光视融合一体化设备的制作方法
1.本实用新型涉及智能交通技术领域,更具体地,涉及一种光视融合一体化设备。
背景技术:
2.随着网络通信技术的不断发展,整个智能交通领域也在由智能交通系统向智能协作系统演变。即由现在的单车智能向车路协同发展,在整个过程中除需提高单车智能化程度以外,整个道路交通体现也要向着智慧高速、智能交通转变。智慧公路首先需要解决的是完善公路感知网络,发展车路协同和自动驾驶。目前单车智能已经可以满足有条件地自动驾驶,但由于受车速及单车探测路况的有效距离等因素。目前自动驾驶车辆难以实现自动驾驶功能,结合以上条件智慧公路在建设过程中需满足以下两点条件:1.路侧感知系统需支持对路况信息全天候、全要素、高精准、高可靠的采集;2.对采集到的信息需要实现高性能处理以及低延时传输。
3.目前已通车或在建设的智慧高速整体技术方案,仍是采用传统监控视频加毫米波雷达部分路段增设激光雷达的形式。在整个实施过程中包括以下几步:1.首先将激光雷达、摄像机等传感器的数据在设备内部或外置处理器内进行初步的数据解析,按照预设规则将输出整个探测区域内所有交通参与者类型、id、航向角、位移等信息至前端融合服务器;2.前端融合服务器内置数据融合算法,结合各种传感器上传的交通参与者实时航向角及位置信息,进行参与者的信息绑定;3.融合服务器将采集到的交通参与者信息与预设交通事件逻辑信息进行比对,实时输出当前监控区域的交通事件信息;4.若传感器之间上报的信息不一致时,融合处理软件结合各传感器上报事件的可信度进行处理上报。以上多传感器融合技术是目前智慧高速及智能交通建设过程中常用的后融合事件检测方法,该方法在实际应用中主要存在以下几点问题:1.设置的大量激光雷达、摄像机的数据均需要远程上传融合服务器,数据输出时延较长;2.不能充分实现各传感器之间的深度融合,传感器之间不能做到优势互补;3.需要部署大量的采集设备,整体工程建设量大、后续维护量大,难以实现大面积推广。
4.有鉴于此,本实用新型提供一种光视融合一体化设备,不存在延时传输,设备部署量少,并且各传感器之间能够进行深度融合。
技术实现要素:
5.本实用新型的目的在于,提供一种光视融合一体化设备,不存在延时传输,设备部署量少,并且各传感器之间能够进行深度融合。
6.本技术的光视融合一体化设备,将激光雷达、摄像机和处理器设置在同一个设备中,处理器对每台设备采集的数据经过处理后再上传终端用户平台。第一方面,传感器的数据不需要远程传输,直接用设备内置的处理器进行处理,数据传输延时极低,几乎没有数据传输延时的问题。第二方面,本技术一台设备融合了多个采集设备和处理器,设备量少。第三方面,本技术的处理器对每台设备采集的图像及点云数据处理后再上传,不存在现有技
术大量数据融合的问题。本技术人在此基础上完成了本技术。
7.一种光视融合一体化设备,所述设备包括:壳体1,以及设置在壳体1内部的摄像机2、激光雷达3和处理器4,所述摄像机2和激光雷达3并排设置,摄像机2和激光雷达3分别与处理器4连接,所述壳体1包括上壳体11、下壳体12和前壳体13,摄像机2、激光雷达3和处理器4的下表面与下壳体12固定,前壳体13具有第一通孔131和第二通孔132,摄像机2的镜头21的位置与第一通孔131对应,摄像机2用于采集图像及视频数据,激光雷达3的端面31的位置与第二通孔132对应,激光雷达3用于采集点云数据,处理器4用于将图像数据和点云数据进行处理并上传至终端用户平台。
8.在一些实施方式中,所述激光雷达3设置在中间,摄像机2设置在激光雷达3的左边,处理器4设置在激光雷达3的右边,摄像机2、激光雷达3及处理器4之间均具有间隙。
9.进一步的,所述摄像机2的镜头21与第一通孔131之间具有间隙,所述第一通孔131内设置有保护盖133,保护盖133与前壳体13固定,保护盖133用于保护摄像机2的镜头21。
10.进一步的,所述摄像机2还包括感光传感器22和处理芯片23,感光传感器22和处理芯片23设置在摄像机2内。
11.进一步的,所述摄像机2用于拍摄照片或视频,完成对整个探测区域内物体的成像与视频监控。
12.在一些实施方式中,所述激光雷达3的端面31与第二通孔132的上表面持平,激光雷达3的端面31与第二通孔132的形状相同,所述激光雷达3还包括激光发射器、棱镜和激光接收器。
13.在一些实施方式中,所述处理器4用于对摄像机2的图像数据和激光雷达3的点云数据进行处理,并上传至终端用户平台。
14.在一些实施方式中,所述上壳体11由上盖板、左盖板、右盖板和后盖板组成,所述下壳体12为下盖板,所述前壳体13为前盖板,第一通孔131的形状与镜头21的形状相同,第一通孔131为圆形,第二通孔132为正方形或长方形。
15.进一步的,所述壳体1为铝塑外壳,其密封防护等级为ip67。
16.在一些实施方式中,所述光视融合一体化设备还包括散热器和电源转换器,散热器用于散热保证设备的稳定运行,所述电源转换器与摄像机2、激光雷达3和处理器4连接,电源转换器用于将市电进行电压转换后给摄像机2、激光雷达3和处理器4提供电能。
17.进一步的,所述电源转换器用于将220v交流电转换为5v、9v、12v或24v直流电。
附图说明
18.结合以下附图一起阅读时,将会更加充分地描述本技术内容的上述和其他特征。可以理解,这些附图仅描绘了本技术内容的若干实施方式,因此不应认为是对本技术内容范围的限定。通过采用附图,本技术内容将会得到更加明确和详细地说明。
19.图1为本技术的光视融合一体化设备的结构示意图。
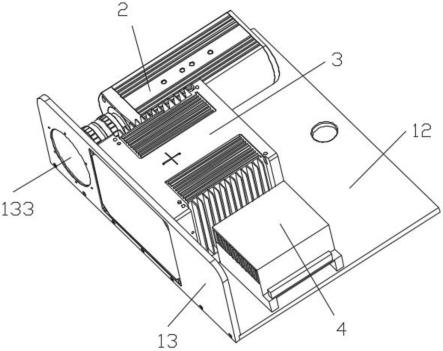
20.图2为本技术的光视融合一体化设备去除上壳体后的结构示意图。
21.图3为本技术的光视融合一体化设备去除上壳体、前壳体和保护盖后的结构示意图。
22.图4为本技术的光视融合一体化设备的摄像机的结构示意图。
23.主要元件符号说明:
24.壳体1、摄像机2、激光雷达3、处理器4、上壳体11、下壳体12、前壳体13、第一通孔131、第二通孔132、保护盖133、镜头21、感光传感器22、处理芯片23、端面31。
具体实施方式
25.描述以下实施例以辅助对本技术的理解,实施例不是也不应当以任何方式解释为限制本技术的保护范围。
26.在以下描述中,本领域的技术人员将认识到,在本论述的全文中,组件可描述为单独的功能单元(可包括子单元),但是本领域的技术人员将认识到,各种组件或其部分可划分成单独组件,或者可整合在一起(包括整合在单个的系统或组件内)。
27.同时,组件或系统之间的连接并不旨在限于直接连接。相反,在这些组件之间的数据可由中间组件修改、重格式化、或以其它方式改变。另外,可使用另外或更少的连接。还应注意,术语“联接”、“连接”、或“输入”“固定”应理解为包括直接连接、通过一个或多个中间媒介来进行的间接的连接或固定。
28.实施例1:
29.一种光视融合一体化设备,如图1-图4所述,所述设备包括:壳体1,以及设置在壳体1内部的摄像机2、激光雷达3和处理器4,所述摄像机2和激光雷达3并排设置,摄像机2和激光雷达3分别与处理器4连接,所述壳体1包括上壳体11、下壳体12和前壳体13,摄像机2、激光雷达3和处理器4的下表面与下壳体12固定,前壳体13具有第一通孔131和第二通孔132,摄像机2的镜头21的位置与第一通孔131对应,摄像机2用于采集图像及视频数据,激光雷达3的端面31的位置与第二通孔132对应,激光雷达3用于采集点云数据,处理器4用于将图像数据和点云数据进行处理并上传至终端用户平台。
30.所述激光雷达3设置在中间,摄像机2设置在激光雷达3的左边,处理器4设置在激光雷达3的右边,摄像机2、激光雷达3及处理器4之间均具有间隙。所述摄像机2的镜头21与第一通孔131之间具有间隙,所述第一通孔131内设置有保护盖133,保护盖133与前壳体13固定,保护盖133用于保护摄像机2的镜头21。所述摄像机2还包括感光传感器22和处理芯片23,感光传感器22和处理芯片23设置在摄像机2内。所述摄像机2用于拍摄照片或视频,完成对整个探测区域内物体的成像与视频监控。
31.所述激光雷达3的端面31与第二通孔132的上表面持平,激光雷达3的端面31与第二通孔132的形状相同,所述激光雷达3还包括激光发射器、棱镜和激光接收器。所述处理器4用于对摄像机2的图像数据和激光雷达3的点云数据进行处理,并上传至终端用户平台。
32.所述上壳体11由上盖板、左盖板、右盖板和后盖板组成,所述下壳体12为下盖板,所述前壳体13为前盖板,第一通孔131的形状与镜头21的形状相同,第一通孔131为圆形,第二通孔132为正方形或长方形。所述壳体1为铝塑外壳,其密封防护等级为i p67。所述光视融合一体化设备还包括散热器和电源转换器,散热器用于散热保证设备的稳定运行,所述电源转换器与摄像机2、激光雷达3和处理器4连接,电源转换器用于将市电进行电压转换后给摄像机2、激光雷达3和处理器4提供电能。所述电源转换器用于将220v交流电转换为24v直流电。
33.尽管本技术已公开了多个方面和实施方式,但是其它方面和实施方式对本领域技
术人员而言将是显而易见的,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。本技术公开的多个方面和实施方式仅用于举例说明,其并非旨在限制本技术,本技术的实际保护范围以权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1