无线耳机防水透气膜组装设备的制作方法
1.本实用新型涉及透气膜组装,具体涉及一种无线耳机防水透气膜组装设备。
背景技术:
2.无线耳机现已广泛应用于日常生活中,并受到广大用户的喜爱,无线耳机一般包括外壳、组装于所述外壳内的电池、电路板、连接线及发声单元。外壳上孔内需要贴附防水透气膜,且贴完膜后需要将防水透气膜上的离型膜剥离。目前防水透气膜组装多采用人工完成,效率低下且产品质量不稳定。
技术实现要素:
3.为了克服上述缺陷,本实用新型提供一种无线耳机防水透气膜组装设备,该设备中利用多个单元之间的相互配合,而自动完成透气膜的上料、耳机的上料、耳机的贴膜和撕膜、下料等操作,工作效率高、组装的良品率高。
4.本实用新型为了解决其技术问题所采用的技术方案是:
5.一种无线耳机防水透气膜组装设备,包括上料搬运单元、飞达上料单元、机械手、第二流线模组、下料搬运单元、ccd模组单元和保压撕膜单元,所述上料搬运单元包括第一搬运模组、第一夹紧模组和第一流线模组,所述下料搬运单元包括第二搬运模组、第二夹紧模组和第三流线模组,所述保压撕膜单元包括保压模组、撕膜模组和第四流线模组,所述第一夹紧模组用于夹紧外部输送机构上的存放耳机的载具并在第一搬运模组的驱动下将载具放于第一流线模组上,所述第一流线模组用于将载具输送至第二流线模组,所述飞达上料单元用于透气膜的上料,所述机械手用于吸取飞达上料单元上的透气膜并将透气膜贴覆于第二流线模组中载具中的耳机上,所述第二流线模组用于将载具输送至第四流线模组,所述保压模组用于对载具中的耳机进行保压,所述撕膜模组用于将耳机上透气膜中的离型膜撕掉,所述第四流线模组用于将载具输送至第三流线模组,所述第二夹紧模组用于将第三流线模组上的载具夹紧并在第二搬运模组的驱动下将载具送至外部输送机构,所述ccd模组单元用于耳机和透气膜的拍照。
6.优选地,所述上料搬运单元还包括第一支架,所述第一搬运模组包括第一y轴移动模组和第一z轴移动模组,所述第一y轴移动模组水平地安装于所述第一支架上,所述第一z轴移动模组垂直地安装于所述第一y轴移动模组上,所述第一夹紧模组竖直地安装于所述第一z轴移动模组上,所述第一z轴移动模组能够驱动第一夹紧模组进行上下运动,所述第一y轴移动模组能够驱动第一z轴移动模组和第一夹紧模组进行y轴方向运动。
7.优选地,所述第一夹紧模组包括第一支撑板、第一旋转气缸、第二支撑板、第一夹紧气缸和第一夹爪组,所述第一支撑板安装于所述第一z轴移动模组上,所述第一旋转气缸固定安装于所述第一支撑板,所述第一夹紧气缸通过第二支撑板安装于第一旋转气缸上,所述第一夹爪组安装于所述第一夹紧气缸。
8.优选地,所述机械手为六轴或四轴机械手,该机械手上安装吸料架,所述吸料架上
安装压力传感器和用于吸取电池的吸杆,所述ccd模组单元包括ccd取料模组、ccd透气膜模组和ccd耳机模组。
9.优选地,所述第二流线模组包括框架、阻挡模组、限位气缸、限位板和扫码模组,所述框架上设有用于产品输送的输送带以及用于驱动该输送带传送的步进电机,所述阻挡模组包括阻挡气缸和阻挡块,所述阻挡气缸能够驱动阻挡块伸出将载具挡住,所述限位气缸上连接一顶升板且该限位气缸能够驱动该顶升板上升而将载具顶出输送带,所述限位板用于定位载具,所述扫码模组用于对载具上的二维码进行扫码。
10.优选地,所述下料搬运单元还包括第二支架,所述第二搬运模组包括第二y轴移动模组和第二z轴移动模组,所述第二y轴移动模组水平地安装于所述第二支架上,所述第二z轴移动模组垂直地安装于所述第二y轴移动模组上,所述第二夹紧模组竖直地安装于所述第二z轴移动模组上,所述第二z轴移动模组能够驱动第二夹紧模组进行上下运动,所述第二y轴移动模组能够驱动第二z轴移动模组和第二夹紧模组进行y轴方向运动。
11.优选地,所述第二夹紧模组包括第三支撑板、第二旋转气缸、第四支撑板、第二夹紧气缸和第二夹爪组,所述第三支撑板安装于所述第二z轴移动模组上,所述第二旋转气缸固定安装于所述第三支撑板,所述第二夹紧气缸通过第四支撑板安装于第二旋转气缸上,所述第二夹爪组安装于所述第二夹紧气缸。
12.优选地,所述保压撕膜单元还包括第三搬运模组,且保压撕膜单元包括两条第四流线模组,所述第三搬运模组用于将一条第四流线模组上的载具搬运至另一条第四流线模组上,所述第三搬运模组包括第三支架、第一y轴气缸、第一z轴气缸、第三旋转气缸和第三夹爪气缸,所述第一y轴气缸水平地安装于所述第三支架,所述第一z轴气缸通过第四支架连接于所述第一y轴气缸,所述第三旋转气缸通过第五支架连接于所述第一y轴气缸,所述第三夹爪气缸连接于所述第三旋转气缸,所述第三夹爪气缸上安装第三夹爪组。
13.优选地,所述保压模组包括第六支架以及安装于所述第六支架的顶升气缸和上下气缸,所述顶升气缸安装于所述上下气缸的下方且该顶升气缸上安装一夹板,所述上下气缸上安装一保压块,所述撕膜模组包括第七支架和废料筒,所述第七支架上安装第二y轴气缸,所述第二y轴气缸上连接一第二z轴气缸,所述第二z轴气缸上安装吸膜气缸和夹膜气缸。
14.本实用新型的有益效果是:本实用新型包括上料搬运单元、飞达上料单元、机械手、第二流线模组、下料搬运单元、ccd模组单元和保压撕膜单元,所述上料搬运单元用于将装有耳机的载具的上料并将载具输送至第二流线模组,所述飞达上料单元用于透气膜的上料,所述机械手用于将透气膜吸取后贴合于第二流线模组中的耳机内,所述保压撕膜单元用于将贴合透气膜的耳机进行保压并将透气膜外层的离型膜撕掉,所述下料搬运单元用于将载具搬运至外部输送机构,而完成耳机的整个贴膜、撕膜操作,所述ccd模组单元用于辅助个单元精确地取料、放料和贴膜。本实用新型利用上料搬运单元、飞达上料单元、机械手、第二流线模组、下料搬运单元、ccd模组单元和保压撕膜单元之间的相互配合,而自动完成透气膜的上料、耳机的上料、透气膜贴覆于耳机以及撕离型纸、下料等操作,本实用新型工作效率高、贴膜良品率高,具有很强的实用性。
附图说明
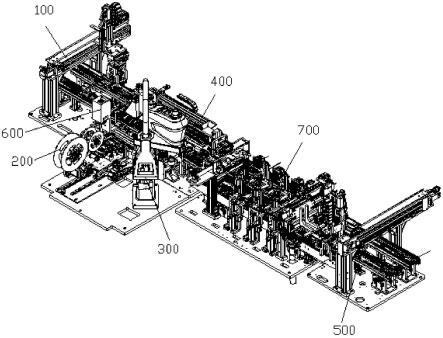
15.图1为本实用新型的结构示意图;
16.图2为本实用新型中上料搬运单元的结构示意图;
17.图3为图2中a处的放大图;
18.图4为本实用新型中飞达上料单元的结构示意图;
19.图5为本实用新型中机械手的结构示意图;
20.图6为图5中b处的放大图;
21.图7为本实用新型中部分单元的结构示意图;
22.图8为本实用新型中第二流线模组的结构示意图;
23.图9为本实用新型中下料搬运单元的结构示意图;
24.图10为图9中c处的放大图;
25.图11为本实用新型中保压撕膜单元的结构示意图;
26.图12为本实用新型中第三搬运模组的结构示意图;
27.图13为本实用新型中保压模组的结构示意图;
28.图14为本实用新型中撕膜模组的结构示意图;
29.图中:100-上料搬运单元,101-第一支架,110-第一搬运模组,111-第一y轴移动模组,112-第一z轴移动模组,120-第一夹紧模组,121-第一支撑板,122-第一旋转气缸,123-第二支撑板,124-第一夹紧气缸,125-第一夹爪组,130-第一流线模组,
30.200-飞达上料单元,
31.300-机械手,301-吸料架,302-压力传感器,303-吸杆,
32.400-第二流线模组,401-框架,402-输送带,403-步进电机,404-阻挡模组,405-限位气缸,406-顶升板,407-限位板,408-扫码模组,
33.500-下料搬运单元,501-第二支架,510-第二搬运模组,511-第二y轴移动模组,512-第二z轴移动模组,520-第二夹紧模组,521-第三支撑板,522-第二旋转气缸,523-第四支撑板,524-第二夹紧气缸,525-第二夹爪组,530-第三流线模组,
34.600-ccd模组单元,601-ccd取料模组,602-ccd透气膜模组,603-ccd耳机模组;
35.700-保压撕膜单元,710-第三搬运模组,711-第三支架,712-第一y轴气缸,713-第四支架,714-第一z轴气缸,715-第五支架,716-第三旋转气缸,717-第三夹爪气缸,718-第三夹爪组,
36.720-保压模组,721-第六支架,722-顶升气缸,723-夹板,724-上下气缸,725-保压块,
37.730-撕膜模组,731-第七支架,732-第二y轴气缸,733-第二z轴气缸,734-吸膜气缸,735-夹膜气缸,736-废料筒,740-第四流线模组。
具体实施方式
38.下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
39.需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以使这里描述的本技术的实施方式例如能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
40.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
41.实施例:如图1-14所示,一种无线耳机防水透气膜组装设备,包括上料搬运单元100、飞达上料单元200、机械手300、第二流线模组400、下料搬运单元500、ccd模组单元600和保压撕膜单元700,所述上料搬运单元100包括第一搬运模组110、第一夹紧模组120和第一流线模组130,所述下料搬运单元500包括第二搬运模组510、第二夹紧模组520和第三流线模组530,所述保压撕膜单元700包括保压模组720、撕膜模组730和第四流线模组740,所述第一夹紧模组120用于夹紧外部输送机构上的存放耳机的载具并在第一搬运模组110的驱动下将载具放于第一流线模组130上,所述第一流线模组130用于将载具输送至第二流线模组400,所述飞达上料单元200用于透气膜的上料,所述机械手300用于吸取飞达上料单元上的透气膜并将透气膜贴覆于第二流线模组中载具中的耳机上,所述第二流线模组400用于将载具输送至第四流线模组740,所述保压模组720用于对载具中的耳机进行保压,所述撕膜模组730用于将耳机上透气膜中的离型膜撕掉,所述第四流线模组740用于将载具输送至第三流线模组530,所述第二夹紧模组520用于将第三流线模组530上的载具夹紧并在第二搬运模组510的驱动下将载具送至外部输送机构,所述ccd模组单元600用于耳机和透气膜的拍照。
42.如图1所示,所述上料搬运单元100、第二流线模组400、保压撕膜单元700和下料搬运单元500依次沿着设备的前后方向布置,且第一流线模组、第二流线模组、第四流线模组和第三流线模组依次对接,所述飞达上料单元200位于第二流线模组400的左侧,所述机械手300位于飞达上料单元与第二流线模组之间,其中飞达上料单元200(如图4所示)中的飞达上料器通过驱动机构能够进行左右方向的运行,以便于透气膜的上下料,飞达上料器为本领域常用装置,在此不作详细介绍。操作时,第一搬运模组110控制第一夹紧模组120将装有耳机的载具搬运至第一流线模组130上,第一流线模组130将载具输送至第二流线模组400上,第二流线模组400将载具固定至预设的组装位置,同时飞达上料单元200将透气膜输送至预设的上料位置,机械手300吸取透气膜并将之贴覆于第二流线模组400上载具的耳机上,贴好透明膜后载具在第二流线模组400的作用下流入第四流线模组740,保压模组720按
压耳机上的透气膜使之紧密贴合于耳机上,撕膜模组将透气膜外侧的离型膜撕掉,然后载具在第四流线模组740的作用下流入第三流线模组530,第二夹紧模组520在第二搬运模组510的作用下将第三流线模组上的载具搬运至外部输送流线。本实用新型利用上料搬运单元100、飞达上料单元200、机械手300、第二流线模组400、下料搬运单元500、ccd模组单元600和保压撕膜单元700之间的相互配合,而自动完成透气膜的上料、耳机的上料、透气膜贴覆于耳机以及将离型纸撕掉等操作,本实用新型工作效率高、贴膜良品率高,具有很强的实用性。
43.如图2所示,所述上料搬运单元100还包括第一支架101,所述第一搬运模组110包括第一y轴移动模组111和第一z轴移动模组112,所述第一y轴移动模组111水平地安装于所述第一支架101上,所述第一z轴移动模组112垂直地安装于所述第一y轴移动模组111上,所述第一夹紧模组120竖直地安装于所述第一z轴移动模组112上,所述第一z轴移动模组112能够驱动第一夹紧模组120进行上下运动,所述第一y轴移动模组111能够驱动第一z轴移动模组112和第一夹紧模组120进行y轴方向运动。所述第一y轴移动模组111沿着第一支架101的左右方向布置,将此方向定义为y轴方向,第一流线模组130沿着第一支架的前后方向布置,且该第一流线模组位于第一y轴移动模组的下方,第一z轴移动模组112竖直地安装于第一y轴移动模组111,则第一y轴移动模组111能够驱动第一z轴移动模组112和第一夹紧模组120进行左右方向的运动,而在第一流线模组130与外部输送机构之间移动,所述第一z轴移动模组112能够驱动第一夹紧模组120上下运动而完成载具的取料和放料动作,所述第一y轴移动模组和第一z轴移动模组可为直线模组、丝杆模组等;运行时,当外部输送机构将存放耳机的载具运送至上料搬运单元100一侧时,所述第一y轴移动模组111驱动第一z轴移动模组112移动至载具的正上方,所述第一夹紧模组120在第一z轴移动模组112驱动下移动至载具处,并将夹具夹紧,然后在第一y轴移动模组111和第一z轴移动模组112的驱动下将载具放入第一流线模组130上。
44.如图3所示,所述第一夹紧模组120包括第一支撑板121、第一旋转气缸122、第二支撑板123、第一夹紧气缸124和第一夹爪组125,所述第一支撑板121安装于所述第一z轴移动模组112上,所述第一旋转气缸122固定安装于所述第一支撑板121,所述第一夹紧气缸124通过第二支撑板123安装于第一旋转气缸122上,所述第一夹爪组125安装于所述第一夹紧气缸124。所述第一支撑板121固定安装于所述第一z轴移动模组的滑板上,所述第一支撑板121的下方安装第一旋转气缸122,所述第一旋转气缸122能够驱动第一夹紧气缸124进行旋转,所述第一夹紧气缸124能够驱动第一夹爪组125开合,而将载具夹紧或松开;运行时,第一旋转气缸122驱动第一夹紧气缸124旋转而调整第一夹爪组125的合适位置,所述第一夹紧气缸124能够驱动第一夹爪组125将载具夹紧,当第一搬运模组110将载具搬运至第一流线模组130上时,第一夹紧气缸驱动第一夹爪组松开载具而将载具放置于所述第一流线模组130上。
45.如图5-6所示,所述机械手300为六轴或四轴机械手,该机械手上安装吸料架301,所述吸料架301上安装压力传感器302和用于吸取电池的吸杆303,所述ccd模组单元600包括ccd取料模组601、ccd透气膜模组602和ccd耳机模组603。所述吸杆303通过形成真空而将电池吸气,所述压力传感器302用于测量吸杆的压力,如图7所示,ccd透气膜模组602用于对透气膜的位置进行拍照,ccd耳机模组603用于对耳机的位置进行拍照,所述ccd取料模组用
于对机械手取料时的吸杆位置进行拍照并结合透气膜的位置而指导机械手准确吸取电池。
46.如图8所示,所述第二流线模组400包括框架401、阻挡模组404、限位气缸405、限位板407和扫码模组408,所述框架401上设有用于产品输送的输送带402以及用于驱动该输送带传送的步进电机403,所述阻挡模组404包括阻挡气缸和阻挡块,所述阻挡气缸能够驱动阻挡块伸出将载具挡住,所述限位气缸405上连接一顶升板406且该限位气缸405能够驱动该顶升板406上升而将载具顶出输送带402,所述限位板407用于定位载具,所述扫码模组408用于对载具上的二维码进行扫码。运行时,当载具从第一流线模组130流入第二流线模组的预设位置后,阻挡模组中的阻挡块伸出将载具挡住后,限位气缸驱动顶升板406带着载具上升至预设安装位置后载具上端被限位板407压紧,而将载具与输送带402脱离,机器人从飞达上料单元200处吸取透气膜后将之贴合于该位置上载具的耳机内。
47.如图9-10所示,所述下料搬运单元500还包括第二支架501,所述第二搬运模组510包括第二y轴移动模组511和第二z轴移动模组512,所述第二y轴移动模组511水平地安装于所述第二支架501上,所述第二z轴移动模组512垂直地安装于所述第二y轴移动模组511上,所述第二夹紧模组520竖直地安装于所述第二z轴移动模组512上,所述第二z轴移动模组512能够驱动第二夹紧模组520进行上下运动,所述第二y轴移动模组511能够驱动第二z轴移动模组512和第二夹紧模组520进行y轴方向运动。
48.所述第二夹紧模组520包括第三支撑板521、第二旋转气缸522、第四支撑板523、第二夹紧气缸524和第二夹爪组525,所述第三支撑板521安装于所述第二z轴移动模组512上,所述第二旋转气缸522固定安装于所述第三支撑板521,所述第二夹紧气缸524通过第四支撑板523安装于第二旋转气缸522上,所述第二夹爪组525安装于所述第二夹紧气缸524。所述下料搬运单元500是将第三流线模组530上的载具搬运至外部机构,其工作原理与上料搬运单元100相同,在此不作重复描述。
49.如图11-12所述,所述保压撕膜单元700还包括第三搬运模组710,且保压撕膜单元包括两条第四流线模组740,所述第三搬运模组710用于将一条第四流线模组740上的载具搬运至另一条第四流线模组上,所述第三搬运模组710包括第三支架711、第一y轴气缸712、第一z轴气缸714、第三旋转气缸716和第三夹爪气缸717,所述第一y轴气缸712水平地安装于所述第三支架711,所述第一z轴气缸714通过第四支架713连接于所述第一y轴气缸712,所述第三旋转气缸716通过第五支架715连接于所述第一y轴气缸712,所述第三夹爪气缸717连接于所述第三旋转气缸716,所述第三夹爪气缸717上安装第三夹爪组718。所述第三支架711沿着左右方向布置,所述第一y轴气缸712为笔形气缸且该第一y轴气缸712水平地设置于所述第三支架711上,所述第一z轴气缸714垂直地安装于第一y轴气缸712上,所述第三旋转气缸716安装于第一z轴气缸714的下端,第三夹爪气缸717安装于第三旋转气缸716的下端,两条第四流线模组740上都安装一组保压模组720和撕膜模组730,当组装好的载具流入其中一条第四流线模组740时,第三搬运模组710将其中一部分的载具搬运至另外一条第四流线模组上,以便于两条流线上的保压模组和撕膜模组同时对载具中的耳机进行操作。操作时,所述第一y轴气缸712能够驱动第一z轴气缸等组件进行左右运行,所述第一z轴气缸能够驱动第三旋转气缸716等进行上下运动,所述第三旋转气缸716能够驱动第三夹爪气缸717进行旋转,所述第三夹爪气缸717能够控制第三夹爪组718开合而将载具夹紧或松开。
50.如图13-14所示,所述保压模组720包括第六支架721以及安装于所述第六支架的顶升气缸722和上下气缸724,所述顶升气缸722安装于所述上下气缸724的下方且该顶升气缸上安装一夹板723,所述上下气缸724上安装一保压块725,所述撕膜模组730包括第七支架731和废料筒736,所述第七支架731上安装第二y轴气缸732,所述第二y轴气缸732上连接一第二z轴气缸733,所述第二z轴气缸733上安装吸膜气缸734和夹膜气缸735。当载具通过第四流线模组740流入保压模组720处时,所述顶升气缸722驱动夹板723上行,上下气缸724驱动保压块725下行,所述保压块和夹板分别从载具的上、下方夹紧载具内的耳机,利用保压块725对耳机上的透气膜进行保压,使得透气膜紧密贴合于耳机上;保压好的耳机流入撕膜模组730,第二y轴气缸732驱动第二z轴气缸733左右移动,使得吸膜气缸734位于耳机上透气膜的正上方,第二z轴气缸733驱动吸膜气缸734朝向透气膜的方向运动,吸膜气缸利用吸嘴将透气膜外层的离型膜吸起后,夹膜气缸735利用夹爪将吸起的离型膜夹住,第二z轴气缸733带动夹膜气缸向上运动而将离型膜撕掉,在第二y轴气缸和第二z轴气缸的作用下夹膜气缸将撕下的离型膜放入废料筒736中,最后载具由第四流线模组740输送至第三流线模组530中。
51.本实用新型的操作方法,包括如下步骤:
52.步骤1:载具上料:当装满耳机的载具从上一工序流入上料搬运单元的一侧时,所述第一搬运模组110驱动第一夹紧模组120运行至载具处并夹紧载具后,再驱动第一夹紧模组120带着载具一起运行至第一流线模组130处并将载具放于第一流线模组130上;
53.步骤2:第一流线模组130驱动载具运行至第二流线模组400的预设位置后,阻挡模组404将载具挡住,同时限位气缸405驱动顶升板406上升而将载具顶出输送带402,利用限位板407将载具定位,所述扫码模组408扫码载具上的二维码,所述ccd耳机模组603对载具内的耳塞进行拍照;
54.步骤3:透气膜上料:所述飞达上料单元200将透气膜输送至预设的取料位置;
55.步骤4:贴合:所述机械手300在ccd取料模组601的辅助下准确将取料位置中的透气膜吸取并将透气膜贴合于第二流线模组400上的载具中的耳机内,完成耳机贴膜的操作;
56.步骤5:限位气缸405驱动载具下行而将载具运送至输送带402上,载具在输送带的作用下流入第四流线模组740,所述第三搬运模组710将一条第四流线模组上的部分载具搬运至另一条第四流线模组;
57.步骤5:保压:当载具流入保压模组720处时,所述顶升气缸722驱动夹板723上行,上下气缸724驱动保压块725下行,所述保压块和夹板分别从载具的上、下方夹紧载具内的耳机,利用保压块725对耳机上的透气膜进行保压,使得透气膜紧密贴合于耳机上;
58.步骤6:保压好的耳机流入撕膜模组730,第二y轴气缸732驱动第二z轴气缸733左右移动,使得吸膜气缸734位于耳机上透气膜的正上方,第二z轴气缸733驱动吸膜气缸734朝向透气膜的方向运动,吸膜气缸利用吸嘴将透气膜外层的离型膜吸起后,夹膜气缸735利用夹爪将吸起的离型膜夹住,第二z轴气缸733带动夹膜气缸向上运动而将离型膜撕掉,然后在第二y轴气缸和第二z轴气缸的作用下夹膜气缸735将撕下的离型膜放入废料筒736中;
59.步骤7:下料:载具由第四流线模组740输送至第三流线模组530,所述第二搬运模组510驱动第二夹紧模组520夹紧第三流线模组530上的载具并将之搬运至外部流线进入下一工序。
60.应当指出,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1