参考信号测量到出发角的映射的制作方法
参考信号测量到出发角的映射
1.公开背景
2.1.公开领域
3.本公开的各方面一般涉及无线通信。
4.2.相关技术描述
5.无线通信系统已经过了数代的发展,包括第一代模拟无线电话服务(1g)、第二代(2g)数字无线电话服务(包括过渡的2.5g和2.75g网络)、第三代(3g)具有因特网能力的高速数据无线服务和第四代(4g)服务(例如,长期演进(lte)或wimax)。目前在用的有许多不同类型的无线通信系统,包括蜂窝以及个人通信服务(pcs)系统。已知蜂窝系统的示例包括蜂窝模拟高级移动电话系统(amps),以及基于码分多址(cdma)、频分多址(fdma)、时分多址(tdma)、全球移动通信系统(gsm)等的数字蜂窝系统。
6.第五代(5g)无线标准(被称为新无线电(nr))要求更高的数据传输速度、更大数目的连接和更好的覆盖、以及其他改进。根据下一代移动网络联盟,5g标准被设计成向成千上万个用户中的每一者提供数十兆比特每秒的数据率,以及向办公楼层里的数十位员工提供1千兆比特每秒的数据率。应当支持几十万个同时连接以支持大型传感器部署。因此,相比于当前的4g标准,5g移动通信的频谱效率应当显著提高。此外,相比于当前标准,信令效率应当提高并且等待时间应当大幅减少。
7.概述
8.以下给出了与本文所公开的一个或多个方面相关的简化概述。由此,以下概述既不应被认为是与所有构想的方面相关的详尽纵览,以下概述也不应被认为标识与所有构想的方面相关的关键性或决定性要素或描绘与任何特定方面相关联的范围。相应地,以下概述的唯一目的是在以下给出的详细描述之前以简化形式呈现与关于本文所公开的机制的一个或多个方面相关的某些概念。
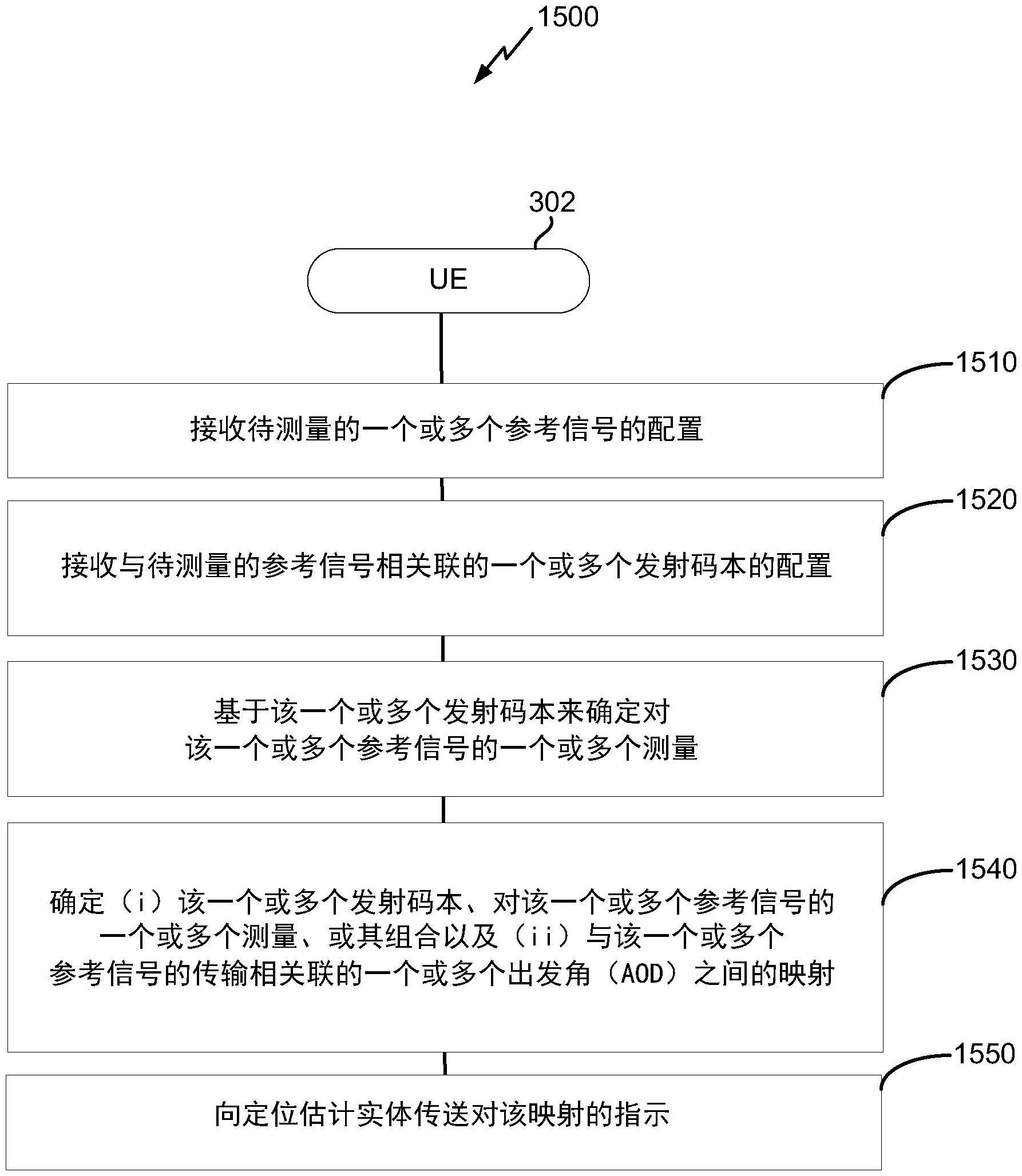
9.在一方面,一种操作用户装备(ue)的方法包括:接收待测量的一个或多个参考信号的配置;接收与待测量的参考信号相关联的一个或多个发射码本的配置;基于该一个或多个发射码本来确定对一个或多个参考信号的一个或多个测量;确定(i)对该一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射;以及向定位估计实体传送对该映射的指示。
10.在一些方面,该映射基于与一个或多个测试用户装备(ue)相关联地执行的现场测试,或者该映射基于与一个或多个ue相关联地众包,或者其组合。
11.在一些方面,定位估计实体对应于该ue、另一ue、基站、位置管理功能(lmf)、或其组合。
12.在一些方面,一个或多个参考信号包括一个或多个侧链路(sl)参考信号,或者一个或多个参考信号包括一个或多个下行链路(dl)信号。
13.在一些方面,该映射是与一个或多个参考信号的接收相关联的不同测量以及与一个或多个参考信号的传输相关联的不同的相应一个或多个aod之间的多个映射中的一者。
14.在一些方面,每一测量使用与一个或多个发射码本以及一个或多个参考信号相关
联的至少一个或多个预编码矩阵指示符(pmi)来推导。
15.在一些方面,一个或多个测量包括:使参考信号在至少一个路径上的收到功率最大化的一个或多个预编码矩阵指示符(pmi)、或一个或多个相对参考信号收到功率(rsrp)测量、或一个或多个抵达时间(toa)测量、或其组合。
16.在一些方面,一个或多个aod包括:单个方位角aod或方位角aod的单个范围、或者多个方位角aod或方位角aod的多个范围、或者单个天顶角aod或天顶角aod的单个范围、或者多个天顶角aod或天顶角aod的多个范围、或者单个天顶角和方位角aod或天顶角和方位角aod的单个范围、或者多个天顶角和方位角aod或天顶角和方位角aod的多个范围、或其组合。
17.在一些方面,多个方位角aod、多个天顶角aod、多个天顶角和方位角aod、方位角aod的多个范围、天顶角aod的多个范围、和/或天顶角和方位角aod的多个范围与一个或多个参考信号的不同多径相关联。
18.在一些方面,该映射经由单播或广播位置辅助数据被配置在ue处。
19.在一些方面,该映射经由新无线电定位协议a(nrppa)信令被传送到位置管理功能(lmf)。
20.在一些方面,该方法包括针对一个或多个其他参考信号测量执行基于公式的aod计算来代替基于映射的aod查找。
21.在一些方面,一个或多个参考信号包括用于定位的参考信号(rs-p)、信道状态指示(csi)-rs、同步信号块(ssb)、跟踪rs(trs)、或解调rs(dmrs)。
22.在一些方面,一个或多个参考信号包括下行链路定位参考信号(dl-prs),或者一个或多个参考信号包括侧链路定位参考信号(sl-prs)。
23.在一些方面,该映射被确定为使第一性能特性比第二性能特性加权更重。
24.在一些方面,第一性能特性与传输的频谱效率相关联并且第二性能特性与信号传输的最早路径的参考信号收到功率(rsrp)相关联,并且一个或多个参考信号与数据通信相关联,或者第二性能特性与传输的频谱效率相关联并且第一性能特性与信号传输的最早路径的参考信号收到功率(rsrp)相关联,并且一个或多个参考信号与ue的定位相关联。
25.在一些方面,接收一个或多个发射码本的配置包括接收发射天线配置并基于发射天线配置来推导一个或多个发射码本。
26.在一方面,一种操作定位估计实体的方法包括:从用户装备(ue)接收对(i)基于一个或多个发射码本对一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射的指示;以及至少部分地基于该一个或多个aod来确定ue的定位估计。
27.在一些方面,该映射基于与一个或多个测试用户装备(ue)相关联地执行的现场测试,或者该映射基于与一个或多个ue相关联地众包,或者其组合。
28.在一些方面,定位估计实体对应于该ue、另一ue、基站、位置管理功能(lmf)、或其组合。
29.在一些方面,一个或多个参考信号包括一个或多个侧链路(sl)参考信号,或者一个或多个参考信号包括一个或多个下行链路(dl)信号。
30.在一些方面,该映射是与一个或多个参考信号的接收相关联的不同测量以及与一
个或多个参考信号的传输相关联的不同的相应一个或多个aod之间的多个映射中的一者。
31.在一些方面,每一测量使用与一个或多个发射码本以及一个或多个参考信号相关联的至少一个或多个预编码矩阵指示符(pmi)来推导。
32.在一些方面,一个或多个测量包括:使参考信号在至少一个路径上的收到功率最大化的一个或多个预编码矩阵指示符(pmi)、或一个或多个相对参考信号收到功率(rsrp)测量、或一个或多个抵达时间(toa)测量、或其组合。
33.在一些方面,一个或多个aod包括:单个方位角aod或方位角aod的单个范围、或者多个方位角aod或方位角aod的多个范围、或者单个天顶角aod或天顶角aod的单个范围、或者多个天顶角aod或天顶角aod的多个范围、或者单个天顶角和方位角aod或天顶角和方位角aod的单个范围、或者多个天顶角和方位角aod或天顶角和方位角aod的多个范围、或其组合。
34.在一些方面,该映射经由单播或广播位置辅助数据被配置在ue处。
35.在一些方面,一个或多个信号包括用于定位的参考信号(rs-p)、信道状态指示(csi)-rs、同步信号块(ssb)、跟踪rs(trs)、或解调rs(dmrs)。
36.在一些方面,一个或多个参考信号包括下行链路定位参考信号(dl-prs),或者一个或多个参考信号包括侧链路定位参考信号(sl-prs)。
37.在一方面,一种用户装备(ue)包括:存储器;至少一个收发机;以及通信地耦合到该存储器和该至少一个收发机的至少一个处理器,该至少一个处理器被配置成:接收待测量的一个或多个参考信号的配置;接收与待测量的参考信号相关联的一个或多个发射码本的配置;基于一个或多个发射码本来确定对该一个或多个参考信号的一个或多个测量;确定(i)对该一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射;以及向定位估计实体传送对该映射的指示。
38.在一些方面,一个或多个参考信号包括一个或多个侧链路(sl)参考信号,或者一个或多个参考信号包括一个或多个下行链路(dl)信号。
39.在一些方面,一个或多个测量包括:使参考信号在至少一个路径上的收到功率最大化的一个或多个预编码矩阵指示符(pmi)、或一个或多个相对参考信号收到功率(rsrp)测量、或一个或多个抵达时间(toa)测量、或其组合。
40.在一些方面,一个或多个aod包括:单个方位角aod或方位角aod的单个范围、或者多个方位角aod或方位角aod的多个范围、或者单个天顶角aod或天顶角aod的单个范围、或者多个天顶角aod或天顶角aod的多个范围、或者单个天顶角和方位角aod或天顶角和方位角aod的单个范围、或者多个天顶角和方位角aod或天顶角和方位角aod的多个范围、或其组合。
41.在一些方面,一个或多个参考信号包括用于定位的参考信号(rs-p)、信道状态指示(csi)-rs、同步信号块(ssb)、跟踪rs(trs)、或解调rs(dmrs)。
42.在一方面,一种定位估计实体包括:存储器;至少一个收发机;以及通信地耦合到该存储器和该至少一个收发机的至少一个处理器,该至少一个处理器被配置成:从用户装备(ue)接收对(i)基于一个或多个发射码本对一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射的指
示;以及至少部分地基于该一个或多个aod来确定ue的定位估计。
43.在一些方面,一个或多个参考信号包括一个或多个侧链路(sl)参考信号,或者一个或多个参考信号包括一个或多个下行链路(dl)信号。
44.在一些方面,一个或多个测量包括:使参考信号在至少一个路径上的收到功率最大化的一个或多个预编码矩阵指示符(pmi)、或一个或多个相对参考信号收到功率(rsrp)测量、或一个或多个抵达时间(toa)测量、或其组合。
45.在一些方面,一个或多个aod包括:单个方位角aod或方位角aod的单个范围、或者多个方位角aod或方位角aod的多个范围、或者单个天顶角aod或天顶角aod的单个范围、或者多个天顶角aod或天顶角aod的多个范围、或者单个天顶角和方位角aod或天顶角和方位角aod的单个范围、或者多个天顶角和方位角aod或天顶角和方位角aod的多个范围、或其组合。
46.在一些方面,一个或多个参考信号包括用于定位的参考信号(rs-p)、信道状态指示(csi)-rs、同步信号块(ssb)、跟踪rs(trs)、或解调rs(dmrs)。
47.基于附图和详细描述,与本文所公开的各方面相关联的其他目标和优点对本领域技术人员而言将是显而易见的。
48.附图简述
49.给出附图以帮助对本公开的各方面进行描述,且提供附图仅用于解说各方面而非对其进行限定。
50.图1解说了根据本公开的各方面的示例无线通信系统。
51.图2a和2b解说了根据本公开的各方面的示例无线网络结构。
52.图3a至3c是可在用户装备(ue)、基站、以及网络实体中分别采用并且被配置成支持如本文所教导的通信的组件的若干样本方面的简化框图。
53.图4是解说根据本公开的各方面的示例基站与示例ue通信的示图。
54.图5是解说根据本公开的各方面的与基于下行链路角或上行链路角的定位方法相关联的定位误差类型的示图。
55.图6是解说根据本公开的各方面的下行链路出发角(aod)定位的各方面的示图。
56.图7是解说根据本公开的各方面的基站在方位角域中朝向ue的可能位置传送第一定位参考信号(prs)资源的示图。
57.图8是解说根据本公开的各方面的图7中的第一prs资源在方位角域中的示例波束响应的图形。
58.图9是解说根据本公开的各方面的基站在方位角域中朝向ue的可能位置传送第二prs资源的示图。
59.图10是解说根据本公开的各方面的图9中的第二prs资源在方位角域中的示例波束响应的图形。
60.图11是解说根据本公开的各方面的三个不同prs资源在方位角域中的示例波束响应的图形。
61.图12和13是根据本公开的各方面的其中基站在六个下行链路发射波束上传送参考信号的示例场景的示图。
62.图14描绘了根据本公开的一方面的天线布置。
63.图15和16解说了根据本公开的各方面的示例无线通信方法。
64.详细描述
65.本公开的各方面在以下针对出于解说目的提供的各种示例的描述和相关附图中提供。可设计替换方面而不脱离本公开的范围。另外,本公开中众所周知的元素将不被详细描述或将被省去以免湮没本公开的相关细节。
66.措辞“示例性”和/或“示例”在本文中用于意指“用作示例、实例或解说”。本文中描述为“示例性”和/或“示例”的任何方面不必被解释为优于或胜过其他方面。同样地,术语“本公开的各方面”不要求本公开的所有方面都包括所讨论的特征、优点或操作模式。
67.本领域技术人员将领会,以下描述的信息和信号可使用各种不同技术和技艺中的任何一种来表示。例如,贯穿以下描述可能被述及的数据、指令、命令、信息、信号、位(比特)、码元以及码片可部分地取决于具体应用、部分地取决于所期望的设计、部分地取决于对应技术等而由电压、电流、电磁波、磁场或磁粒子、光场或光粒子、或其任何组合表示。
68.此外,许多方面以由例如计算设备的元件执行的动作序列的形式来描述。将认识到,本文中所描述的各种动作能由专用电路(例如,专用集成电路(asic))、由正被一个或多个处理器执行的程序指令、或由这两者的组合来执行。另外,本文中所描述的动作序列可被认为是完全体现在任何形式的非瞬态计算机可读存储介质内,该非瞬态计算机可读存储介质中存储有一经执行就将使得或指令设备的相关联处理器执行本文中所描述的功能性的相应计算机指令集。由此,本公开的各个方面可以数种不同形式体现,所有这些形式都已被构想为落在所要求保护的主题内容的范围内。另外,对于本文中所描述的每一方面,任何此类方面的对应形式可在本文中被描述为例如“被配置成执行所描述的动作的逻辑”。
69.如本文中所使用的,术语“用户装备”(ue)和“基站”并非旨在专用于或以其他方式被限定于任何特定的无线电接入技术(rat),除非另有说明。一般而言,ue可以是被用户用来在无线通信网络上进行通信的任何无线通信设备(例如,移动电话、路由器、平板计算机、膝上型计算机、消费者资产跟踪设备、可穿戴设备(例如,智能手表、眼镜、增强现实(ar)/虚拟现实(vr)头戴式设备等)、交通工具(例如,汽车、摩托车、自行车等)、物联网(iot)设备等)。ue可以是移动的或者可以(例如,在某些时间)是驻定的,并且可与无线电接入网(ran)进行通信。如本文中所使用的,术语“ue”可以互换地被称为“接入终端”或“at”、“客户端设备”、“无线设备”、“订户设备”、“订户终端”、“订户站”、“用户终端”或“ut”、“移动设备”、“移动终端”、“移动站”、或其变型。一般而言,ue可以经由ran与核心网进行通信,并且通过核心网,ue可与外部网络(诸如因特网)以及与其他ue连接。当然,连接到核心网和/或因特网的其他机制对于ue而言也是可能的,诸如通过有线接入网、无线局域网(wlan)网络(例如,基于电气与电子工程师协会(ieee)802.11规范等)等等。
70.基站可取决于该基站被部署在其中的网络而根据若干rat之一进行操作来与ue通信,并且可以替换地被称为接入点(ap)、网络节点、b节点、演进型b节点(enb)、下一代enb(ng-enb)、新无线电(nr)b节点(也被称为gnb或gnodeb)等等。基站可主要被用于支持由ue进行的无线接入,包括支持关于所支持ue的数据、语音、和/或信令连接。在一些系统中,基站可提供纯边缘节点信令功能,而在其他系统中,基站可提供附加的控制和/或网络管理功能。ue可籍以向基站发送信号的通信链路被称为上行链路(ul)信道(例如,反向话务信道、反向控制信道、接入信道等)。基站可籍以向ue发送信号的通信链路被称为下行链路(dl)或
前向链路信道(例如,寻呼信道、控制信道、广播信道、前向话务信道等)。如本文所使用的,术语话务信道(tch)可以指上行链路/反向话务信道或下行链路/前向话务信道。
71.术语“基站”可以指单个物理传送接收点(trp)或者可以指可能或可能不共置的多个物理trp。例如,在术语“基站”指单个物理trp的情况下,该物理trp可以是与基站的蜂窝小区(或若干个蜂窝小区扇区)相对应的基站天线。在术语“基站”指多个共置的物理trp的情况下,该物理trp可以是基站的天线阵列(例如,如在多输入多输出(mimo)系统中或在基站采用波束成形的情况下)。在术语“基站”指多个非共置的物理trp的情况下,该物理trp可以是分布式天线系统(das)(经由传输介质来连接到共用源的在空间上分离的天线的网络)或远程无线电头端(rrh)(连接到服务基站的远程基站)。替换地,非共置的物理trp可以是从ue接收测量报告的服务基站和该ue正在测量其参考射频(rf)信号的邻居基站。由于trp是基站从其传送和接收无线信号的点,如本文中所使用的,因此对来自基站的传输或在基站处的接收的引用应被理解为引用该基站的特定trp。
72.在支持ue定位的一些实现中,基站可能不支持ue的无线接入(例如,可能不支持关于ue的数据、语音、和/或信令连接),但是可以替代地向ue传送要被ue测量的参考信号、和/或可以接收和测量由ue传送的信号。此类基站可被称为定位塔台(例如,在向ue传送信号的情况下)和/或被称为位置测量单元(例如,在接收和测量来自ue的信号的情况下)。
[0073]“rf信号”包括通过传送方与接收方之间的空间来传输信息的给定频率的电磁波。如本文中所使用的,传送方可向接收方传送单个“rf信号”或多个“rf信号”。然而,由于通过多径信道的各rf信号的传播特性,接收方可接收到与每个所传送rf信号相对应的多个“rf信号”。传送方与接收方之间的不同路径上所传送的相同rf信号可被称为“多径”rf信号。
[0074]
图1解说了示例无线通信系统100。无线通信系统100(也可被称为无线广域网(wwan))可包括各个基站102和各个ue 104。基站102可包括宏蜂窝小区基站(高功率蜂窝基站)和/或小型蜂窝小区基站(低功率蜂窝基站)。在一方面,宏蜂窝小区基站可包括enb和/或ng-enb(其中无线通信系统100对应于lte网络)、或者gnb(其中无线通信系统100对应于nr网络)、或两者的组合,并且小型蜂窝小区基站可包括毫微微蜂窝小区、微微蜂窝小区、微蜂窝小区等等。
[0075]
各基站102可共同形成ran并通过回程链路122与核心网170(例如,演进型分组核心(epc)或5g核心(5gc))对接,并通过核心网170连接到一个或多个位置服务器172(其可以是核心网170的一部分或者可在核心网170外部)。除了其他功能,基站102还可执行与传递用户数据、无线电信道暗码化和暗码解译、完整性保护、报头压缩、移动性控制功能(例如,切换、双连通性)、蜂窝小区间干扰协调、连接设立和释放、负载平衡、非接入阶层(nas)消息的分发、nas节点选择、同步、ran共享、多媒体广播多播服务(mbms)、订户和装备追踪、ran信息管理(rim)、寻呼、定位、以及警报消息的递送中的一者或多者相关的功能。基站102可通过回程链路134(其可以是有线的或无线的)直接或间接地(例如,通过epc/5gc)彼此通信。
[0076]
基站102可与ue 104进行无线通信。每个基站102可为各自相应的地理覆盖区域110提供通信覆盖。在一方面,一个或多个蜂窝小区可由每个地理覆盖区域110中的基站102支持。“蜂窝小区”是用于与基站(例如,在某个频率资源上,被称为载波频率、分量载波、载波、频带等等)进行通信的逻辑通信实体,并且可与标识符(例如,物理蜂窝小区标识符(pci)、虚拟蜂窝小区标识符(vci)、蜂窝小区全局标识符(cgi))相关联以区分经由相同或
不同载波频率操作的蜂窝小区。在一些情形中,可根据可为不同类型的ue提供接入的不同协议类型(例如,机器类型通信(mtc)、窄带iot(nb-iot)、增强型移动宽带(embb)或其他)来配置不同蜂窝小区。由于蜂窝小区由特定的基站支持,因此术语“蜂窝小区”可取决于上下文而指代逻辑通信实体和支持该逻辑通信实体的基站中的任一者或两者。在一些情形中,在载波频率可被检测到并且被用于地理覆盖区域110的某个部分内的通信的意义上,术语“蜂窝小区”还可以指基站的地理覆盖区域(例如,扇区)。
[0077]
虽然相邻宏蜂窝小区基站102的各地理覆盖区域110可部分地交叠(例如,在切换区域中),但是一些地理覆盖区域110可能基本上被较大的地理覆盖区域110交叠。例如,小型蜂窝小区(sc)基站102'可具有基本上与一个或多个宏蜂窝小区基站102的地理覆盖区域110交叠的地理覆盖区域110'。包括小型蜂窝小区和宏蜂窝小区基站两者的网络可被称为异构网络。异构网络还可包括家用enb(henb),该henb可向被称为封闭订户群(csg)的受限群提供服务。
[0078]
基站102与ue 104之间的通信链路120可包括从ue 104到基站102的上行链路(亦称为反向链路)传输和/或从基站102到ue 104的下行链路(亦称为前向链路)传输。通信链路120可使用mimo天线技术,包括空间复用、波束成形、和/或发射分集。通信链路120可通过一个或多个载波频率。载波的分配可以关于下行链路和上行链路是非对称的(例如,与上行链路相比可将更多或更少载波分配给下行链路)。
[0079]
无线通信系统100可进一步包括在无执照频谱(例如,5ghz)中经由通信链路154与wlan站(sta)152处于通信的无线局域网(wlan)接入点(ap)150。当在无执照频谱中进行通信时,wlan sta 152和/或wlan ap 150可在进行通信之前执行畅通信道评估(cca)或先听后讲(lbt)规程以确定信道是否可用。
[0080]
小型蜂窝小区基站102'可在有执照和/或无执照频谱中操作。当在无执照频谱中操作时,小型蜂窝小区基站102'可采用lte或nr技术并且使用与由wlan ap 150使用的频谱相同的5ghz无执照频谱。在无执照频谱中采用lte/5g的小型蜂窝小区基站102'可推升对接入网的覆盖和/或增加接入网的容量。无执照频谱中的nr可被称为nr-u。无执照频谱中的lte可被称为lte-u、有执照辅助式接入(laa)、或multefire。
[0081]
无线通信系统100可进一步包括毫米波(mmw)基站180,该mmw基站180可在mmw频率和/或近mmw频率中操作以与ue 182处于通信。极高频(ehf)是电磁频谱中的rf的一部分。ehf具有30ghz到300ghz的范围以及1毫米到10毫米之间的波长。该频带中的无线电波可被称为毫米波。近mmw可向下扩展至具有100毫米波长的3ghz频率。超高频(shf)频带在3ghz到30ghz之间扩展,其还被称为厘米波。使用mmw/近mmw射频频带的通信具有高路径损耗和相对短的射程。mmw基站180和ue 182可利用mmw通信链路184上的波束成形(发射和/或接收)来补偿极高路径损耗和短射程。此外,将领会,在替换配置中,一个或多个基站102还可使用mmw或近mmw以及波束成形来进行传送。相应地,将领会,前述解说仅仅是示例,并且不应当被解读成限定本文中所公开的各个方面。
[0082]
发射波束成形是一种用于将rf信号聚焦在特定方向上的技术。常规地,当网络节点(例如,基站)广播rf信号时,该网络节点在所有方向上(全向地)广播该信号。利用发射波束成形,网络节点确定给定目标设备(例如,ue)(相对于传送方网络节点)位于哪里,并在该特定方向上投射较强下行链路rf信号,从而为接收方设备提供较快(就数据率而言)且较强
的rf信号。为了在发射时改变rf信号的方向性,网络节点可在正在广播该rf信号的一个或多个发射机中的每个发射机处控制该rf信号的相位和相对振幅。例如,网络节点可使用产生rf波的波束的天线阵列(被称为“相控阵”或“天线阵列”),rf波的波束能够被“引导”指向不同的方向,而无需实际地移动这些天线。具体地,来自发射机的rf电流以正确的相位关系被馈送到个体天线,以使得来自分开的天线的无线电波在期望方向上相加在一起以增大辐射,而同时在不期望方向上抵消以抑制辐射。
[0083]
发射波束可以是准共置的,这意味着它们在接收方(例如,ue)看来具有相同的参数,而不论该网络节点的发射天线本身是否在物理上是共置的。在nr中,存在四种类型的准共置(qcl)关系。具体而言,给定类型的qcl关系意味着:关于目标波束上的目标参考rf信号的某些参数可以从关于源波束上的源参考rf信号的信息推导出。如果源参考rf信号是qcl类型a,则接收方可以使用源参考rf信号来估计在相同信道上传送的目标参考rf信号的多普勒频移、多普勒扩展、平均延迟、以及延迟扩展。如果源参考rf信号是qcl类型b,则接收方可以使用源参考rf信号来估计在相同信道上传送的目标参考rf信号的多普勒频移和多普勒扩展。如果源参考rf信号是qcl类型c,则接收方可以使用源参考rf信号来估计在相同信道上传送的目标参考rf信号的多普勒频移和平均延迟。如果源参考rf信号是qcl类型d,则接收方可以使用源参考rf信号来估计在相同信道上传送的目标参考rf信号的空间接收参数。
[0084]
在接收波束成形中,接收机使用接收波束来放大在给定信道上检测到的rf信号。例如,接收机可在特定方向上增大天线阵列的增益设置和/或调整天线阵列的相位设置,以放大从该方向接收到的rf信号(例如,增大其增益水平)。由此,当接收机被称为在某个方向上进行波束成形时,这意味着该方向上的波束增益相对于沿其他方向的波束增益而言是较高的,或者该方向上的波束增益相比于对该接收机可用的所有其他接收波束在该方向上的波束增益而言是最高的。这导致从该方向接收的rf信号有较强的收到信号强度(例如,参考信号收到功率(rsrp)、参考信号收到质量(rsrq)、信号与干扰加噪声比(sinr)等等)。
[0085]
接收波束可以是空间相关的。空间关系意味着用于第二参考信号的发射波束的参数可以从关于第一参考信号的接收波束的信息推导出。例如,ue可使用特定的接收波束从基站接收一个或多个参考下行链路参考信号(例如,定位参考信号(prs)、跟踪参考信号(trs)、相位跟踪参考信号(ptrs)、因蜂窝小区而异的参考信号(crs)、信道状态信息参考信号(csi-rs)、主同步信号(pss)、副同步信号(sss)、同步信号块(ssb)等等)。ue随后可以基于接收波束的参数来形成发射波束以用于向该基站发送一个或多个上行链路参考信号(例如,上行链路定位参考信号(ul-prs)、探通参考信号(srs)、解调参考信号(dmrs)、ptrs等等)。
[0086]
注意,取决于形成“下行链路”波束的实体,该波束可以是发射波束或接收波束。例如,若基站正形成下行链路波束以向ue传送参考信号,则该下行链路波束是发射波束。然而,若ue正形成下行链路波束,则该下行链路波束是用于接收下行链路参考信号的接收波束。类似地,取决于形成“上行链路”波束的实体,该波束可以是发射波束或接收波束。例如,若基站正形成上行链路波束,则该上行链路波束是上行链路接收波束,而若ue正形成上行链路波束,则该上行链路波束是上行链路发射波束。
[0087]
在5g中,无线节点(例如,基站102/180、ue 104/182)在其中操作的频谱被划分成
多个频率范围:fr1(从450到6000mhz)、fr2(从24250到52600mhz)、fr3(高于52600mhz)、以及fr4(在fr1与fr2之间)。在多载波系统(诸如5g)中,载波频率之一被称为“主载波”或“锚载波”或“主服务蜂窝小区”或“pcell”,并且剩余载波频率被称为“辅载波”或“副服务蜂窝小区”或“scell”。在载波聚集中,锚载波是在由ue 104/182利用的主频率(例如,fr1)上并且在ue 104/182在其中执行初始无线电资源控制(rrc)连接建立规程或发起rrc连接重建规程的蜂窝小区上操作的载波。主载波携带所有共用控制信道以及因ue而异的控制信道,并且可以是有执照频率中的载波(然而,并不总是这种情形)。辅载波是在第二频率(例如,fr2)上操作的载波,一旦在ue 104与锚载波之间建立了rrc连接就可以配置该载波,并且该载波可被用于提供附加无线电资源。在一些情形中,辅载波可以是无执照频率中的载波。辅载波可仅包含必要的信令信息和信号,例如,因ue而异的信令信息和信号可能不存在于辅载波中,因为主上行链路和下行链路载波两者通常都是因ue而异的。这意味着蜂窝小区中的不同ue 104/182可具有不同下行链路主载波。这对于上行链路主载波而言同样成立。网络能够在任何时间改变任何ue 104/182的主载波。例如,这样做是为了平衡不同载波上的负载。由于“服务蜂窝小区”(无论是pcell还是scell)对应于某个基站正用于进行通信的载波频率/分量载波,因此术语“蜂窝小区”、“服务蜂窝小区”、“分量载波”、“载波频率”等等可被可互换地使用。
[0088]
例如,仍然参照图1,由宏蜂窝小区基站102利用的频率之一可以是锚载波(或“pcell”),并且由该宏蜂窝小区基站102和/或mmw基站180利用的其他频率可以是辅载波(“scell”)。对多个载波的同时传送和/或接收使得ue 104/182能够显著增大其数据传输和/或接收速率。例如,多载波系统中的两个20mhz聚集载波与由单个20mhz载波获得的数据率相比较而言理论上将导致数据率的两倍增加(即,40mhz)。
[0089]
无线通信系统100可进一步包括ue 164,该ue 164可在通信链路120上与宏蜂窝小区基站102进行通信和/或在mmw通信链路184上与mmw基站180进行通信。例如,宏蜂窝小区基站102可支持pcell和一个或多个scell以用于ue 164,并且mmw基站180可支持一个或多个scell以用于ue 164。
[0090]
在图1的示例中,一个或多个地球轨道卫星定位系统(sps)航天器(sv)112(例如,卫星)可被用作任何所解说ue(为了简单起见在图1中示为单个ue 104)的位置信息的独立源。ue 104可包括一个或多个专用sps接收机,这些专用sps接收机专门设计成从sv 112接收sps信号124以推导地理位置信息。sps通常包括传送方系统(例如,sv 112),其被定位成使得接收方(例如,ue 104)能够至少部分地基于从传送方接收到的信号(例如,sps信号124)来确定这些接收方在地球上或上方的位置。此类传送方通常传送用设定数目个码片的重复伪随机噪声(pn)码来标记的信号。虽然传送方通常位于sv 112中,但是有时也可位于基于地面的控制站、基站102、和/或其他ue 104上。
[0091]
sps信号124的使用能通过各种基于卫星的扩增系统(sbas)来扩增,该sbas可与一个或多个全球性和/或区域性导航卫星系统相关联或者以其他方式被启用以与一个或多个全球性和/或区域性导航卫星系统联用。例如,sbas可包括提供完整性信息、差分校正等的扩增系统,诸如广域扩增系统(waas)、欧洲对地静止导航覆盖服务(egnos)、多功能卫星扩增系统(msas)、全球定位系统(gps)辅助地理扩增导航或gps和地理扩增导航系统(gagan)等等。由此,如本文中所使用的,sps可包括一个或多个全球性和/或区域性导航卫星系统
和/或扩增系统的任何组合,并且sps信号124可包括sps、类sps、和/或与此类一个或多个sps相关联的其他信号。
[0092]
无线通信系统100可进一步包括一个或多个ue(诸如ue 190),该一个或多个ue经由一个或多个设备到设备(d2d)对等(p2p)链路(被称为“侧链路”)间接地连接到一个或多个通信网络。在图1的示例中,ue 190具有与连接到一个基站102的一个ue 104的d2d p2p链路192(例如,ue 190可通过其间接地获得蜂窝连通性),以及与连接到wlan ap 150的wlan sta 152的d2d p2p链路194(ue 190可通过其间接地获得基于wlan的因特网连通性)。在一示例中,d2d p2p链路192和194可以使用任何公知的d2d rat(诸如lte直连(lte-d)、wifi直连(wifi-d)、等)来支持。
[0093]
图2a解说了示例无线网络结构200。例如,5gc 210(也被称为下一代核心(ngc))可在功能上被视为控制面功能214(例如,ue注册、认证、网络接入、网关选择等)和用户面功能212(例如,ue网关功能、对数据网络的接入、ip路由等),它们协同地操作以形成核心网。用户面接口(ng-u)213和控制面接口(ng-c)215将gnb 222连接到5gc 210,尤其连接到控制面功能214和用户面功能212。在附加配置中,ng-enb 224也可经由至控制面功能214的ng-c 215以及至用户面功能212的ng-u 213来连接到5gc 210。此外,ng-enb 224可经由回程连接223直接与gnb 222进行通信。在一些配置中,新ran 220可以仅具有一个或多个gnb 222,而其他配置包括一个或多个ng-enb 224和一个或多个gnb 222两者。gnb 222或ng-enb 224可与ue 204(例如,图1中所描绘的任何ue)进行通信。另一可任选方面可包括位置服务器230,位置服务器230可与5gc 210处于通信以为ue 204提供位置辅助。位置服务器230可被实现为多个分开的服务器(例如,物理上分开的服务器、单个服务器上的不同软件模块、跨越多个物理服务器扩展的不同软件模块等等),或者替换地可各自对应于单个服务器。位置服务器230可被配置成支持用于ue 204的一个或多个位置服务,ue 204能够经由核心网、5gc 210和/或经由因特网(未解说)连接到位置服务器230。此外,位置服务器230可被集成到核心网的组件中,或者替换地可在核心网外部。
[0094]
图2b解说了另一示例无线网络结构250。例如,5gc 260可在功能上被视为控制面功能(由接入和移动性管理功能(amf)264提供)以及用户面功能(由用户面功能(upf)262提供),它们协同地操作以形成核心网(即,5gc 260)。用户面接口263和控制面接口265将ng-enb 224连接到5gc 260,尤其分别连接到upf 262和amf 264。在附加配置中,gnb 222也可经由至amf 264的控制面接口265以及至upf 262的用户面接口263来连接到5gc 260。此外,ng-enb 224可在具有或没有至5gc 260的gnb直接连通性的情况下经由回程连接223直接与gnb 222进行通信。在一些配置中,新ran 220可以仅具有一个或多个gnb 222,而其他配置包括一个或多个ng-enb 224和一个或多个gnb 222两者。gnb 222或ng-enb 224可与ue 204(例如,图1中所描绘的任何ue)进行通信。新ran 220的基站通过n2接口与amf 264进行通信,并且通过n3接口与upf 262进行通信。
[0095]
amf 264的功能包括注册管理、连接管理、可达性管理、移动性管理、合法拦截、在ue 204与会话管理功能(smf)266之间的会话管理(sm)消息的传输、用于路由sm消息的透明代理服务、接入认证和接入授权、在ue 204与短消息服务功能(smsf)(未示出)之间的短消息服务(sms)消息的传输、以及安全锚功能性(seaf)。amf 264还与认证服务器功能(ausf)(未示出)和ue 204交互,并接收作为ue 204认证过程的结果而确立的中间密钥。在基于
umts(通用移动电信系统)订户身份模块(usim)来认证的情形中,amf 264从ausf中检索安全材料。amf 264的功能还包括安全上下文管理(scm)。scm从seaf接收密钥,该密钥被scm用来推导因接入网而异的密钥。amf 264的功能性还包括:用于监管服务的位置服务管理、在ue 204与位置管理功能(lmf)270(其充当位置服务器230)之间的位置服务消息的传输、在新ran 220与lmf 270之间的位置服务消息的传输、用于与演进分组系统(eps)互通的eps承载标识符分配、以及ue 204移动性事件通知。另外,amf 264还支持非3gpp(第三代伙伴项目)接入网的功能性。
[0096]
upf 262的功能包括:充当rat内/rat间移动性的锚点(在适用时)、充当互连至数据网络(未示出)的外部协议数据单元(pdu)会话点、提供分组路由和转发、分组检视、用户面策略规则实施(例如,选通、重定向、话务引导)、合法拦截(用户面收集)、话务使用报告、用于用户面的服务质量(qos)处置(例如,上行链路/下行链路速率实施、下行链路中的反射性qos标记)、上行链路话务验证(服务数据流(sdf)到qos流映射)、上行链路和下行链路中的传输级分组标记、下行链路分组缓冲和下行链路数据通知触发、以及向源ran节点发送和转发一个或多个“结束标记”。upf 262还可支持位置服务消息在用户面上在ue 204与位置服务器(诸如安全用户面定位(supl)位置平台(slp)272)之间的传输。
[0097]
smf 266的功能包括会话管理、ue网际协议(ip)地址分配和管理、用户面功能的选择和控制、在upf 262处用于将话务路由到正确目的地的话务引导配置、对策略实施和qos的部分控制、以及下行链路数据通知。smf 266用于与amf 264进行通信的接口被称为n11接口。
[0098]
另一可任选方面可包括lmf 270,lmf 270可与5gc 260处于通信以为ue 204提供位置辅助。lmf 270可被实现为多个分开的服务器(例如,物理上分开的服务器、单个服务器上的不同软件模块、跨越多个物理服务器扩展的不同软件模块等等),或者替换地可各自对应于单个服务器。lmf 270可被配置成支持用于ue 204的一个或多个位置服务,ue 204能够经由核心网、5gc 260和/或经由因特网(未解说)连接到lmf 270。slp 272可支持与lmf 270类似的功能,但是lmf270可在控制面上(例如,使用旨在传达信令消息而非语音或数据的接口和协议)与amf 264、新ran 220、以及ue 204进行通信,slp 272可在用户面上(例如,使用旨在携带语音和/或数据的协议,如传输控制协议(tcp)和/或ip)与ue 204和外部客户端(图2b中未示出)进行通信。
[0099]
图3a、3b和3c解说了可被纳入ue 302(其可对应于本文中所描述的任何ue)、基站304(其可对应于本文中所描述的任何基站)、以及网络实体306(其可对应于或体现本文中所描述的任何网络功能,包括位置服务器230和lmf 270)中的若干示例组件(由对应的框来表示)以支持如本文所教导的文件传输操作。将领会,这些组件在不同实现中可在不同类型的装置中(例如,在asic中、在片上系统(soc)中等)实现。所解说的组件也可被纳入到通信系统中的其他装置中。例如,系统中的其他装置可包括与所描述的那些组件类似的组件以提供类似的功能性。此外,给定装置可包含这些组件中的一个或多个组件。例如,装置可包括使得该装置能够在多个载波上操作和/或经由不同技术进行通信的多个收发机组件。
[0100]
ue 302和基站304各自分别包括无线广域网(wwan)收发机310和350,从而提供用于经由一个或多个无线通信网络(未示出)(诸如nr网络、lte网络、gsm网络等等)进行通信的装置(例如,用于传送的装置、用于接收的装置、用于测量的装置、用于调谐的装置、用于
抑制进行传送的装置等等)。wwan收发机310和350可分别连接到一个或多个天线316和356,以用于经由至少一个指定rat(例如,nr、lte、gsm等)在感兴趣的无线通信介质(例如,特定频谱中的某个时间/频率资源集)上与其他网络节点(诸如其他ue、接入点、基站(例如,enb、gnb)等)进行通信。wwan收发机310和350可根据指定rat以各种方式分别被配置成用于传送和编码信号318和358(例如,消息、指示、信息等),以及反之分别被配置成用于接收和解码信号318和358(例如,消息、指示、信息、导频等)。具体地,wwan收发机310和350分别包括一个或多个发射机314和354以分别用于传送和编码信号318和358,并分别包括一个或多个接收机312和352以分别用于接收和解码信号318和358。
[0101]
至少在一些情形中,ue 302和基站304还分别包括一个或多个短程无线收发机320和360。短程无线收发机320和360可分别连接到一个或多个天线326和366,并且提供用于经由至少一个指定rat(例如,wifi、lte-d、d、pc5、专用短程通信(dsrc)、车载环境无线接入(wave)、近场通信(nfc)等)在感兴趣的无线通信介质上与其他网络节点(诸如其他ue、接入点、基站等)进行通信的装置(例如,用于传送的装置、用于接收的装置、用于测量的装置、用于调谐的装置、用于抑制进行传送的装置等)。短程无线收发机320和360可根据指定rat以各种方式分别被配置成用于传送和编码信号328和368(例如,消息、指示、信息等),以及反之分别被配置成用于接收和解码信号328和368(例如,消息、指示、信息、导频等)。具体地,短程无线收发机320和360分别包括一个或多个发射机324和364以分别用于传送和编码信号328和368,并分别包括一个或多个接收机322和362以分别用于接收和解码信号328和368。作为特定示例,短程无线收发机320和360可以是wifi收发机、收发机、和/或收发机、nfc收发机、或交通工具到交通工具(v2v)和/或车联网(v2x)收发机。
[0102]
包括至少一个发射机和至少一个接收机的收发机电路系统在一些实现中可包括集成设备(例如,实施为单个通信设备的发射机电路和接收机电路),在一些实现中可包括分开的发射机设备和分开的接收机设备,或者在其他实现中可按其他方式来实施。在一方面,发射机可包括或耦合到诸如天线阵列之类的多个天线(例如,天线316、326、356、366),该多个天线准许该相应装置执行发射“波束成形”,如本文中所描述的。类似地,接收机可包括或耦合到诸如天线阵列之类的多个天线(例如,天线316、326、356、366),该多个天线准许该相应装置执行接收波束成形,如本文中所描述的。在一方面,发射机和接收机可共享相同的多个天线(例如,天线316、326、356、366),以使得该相应装置在给定时间只能进行接收或传送,而不是同时进行两者。ue 302和/或基站304的无线通信设备(例如,收发机310和320中的一者或两者和/或收发机350和360中的一者或两者)还可包括用于执行各种测量的网络监听模块(nlm)等。
[0103]
至少在一些情形中,ue 302和基站304还包括卫星定位系统(sps)接收机330和370。sps接收机330和370可分别连接到一个或多个天线336和376,并且可分别提供用于接收和/或测量sps信号338和378的装置,这些sps信号诸如全球定位系统(gps)信号、全球导航卫星系统(glonass)信号、伽利略信号、北斗信号、印度区域性导航卫星系统(navic)、准天顶卫星系统(qzss)等。sps接收机330和370可分别包括用于接收和处理sps信号338和378的任何合适的硬件和/或软件。sps接收机330和370在适当时向其他系统请求信息和操作,并执行必要的计算以使用由任何合适的sps算法获得的测量来确定ue 302和基站304的定
位。
[0104]
基站304和网络实体306各自分别包括至少一个网络接口380和390,从而提供用于与其他网络实体进行通信的装置(例如,用于传送的装置、用于接收的装置等)。例如,网络接口380和390(例如,一个或多个网络接入端口)可被配置成经由基于有线的回程连接或无线回程连接来与一个或多个网络实体通信。在一些方面,网络接口380和390可被实现为被配置成支持基于有线的信号通信或无线信号通信的收发机。该通信可涉及例如发送和接收:消息、参数、和/或其他类型的信息。
[0105]
ue 302、基站304和网络实体306还包括可结合如本文中所公开的操作来使用的其他组件。ue 302包括处理器电路系统,其实现用于提供例如与无线定位有关的功能性、以及用于提供其他处理功能性的处理系统332。基站304包括用于提供例如与如本文中所公开的无线定位有关的功能性、以及用于提供其他处理功能性的处理系统384。网络实体306包括用于提供例如与如本文中所公开的无线定位有关的功能性、以及用于提供其他处理功能性的处理系统394。处理系统332、384和394因此可提供用于处理的装置,诸如用于确定的装置、用于计算的装置、用于接收的装置、用于传送的装置、用于指示的装置等等。在一方面,处理系统332、384和394可包括例如一个或多个处理器,诸如一个或多个通用处理器、多核处理器、asic、数字信号处理器(dsp)、现场可编程门阵列(fpga)、其他可编程逻辑器件或处理电路系统、或其各种组合。
[0106]
ue 302、基站304和网络实体306包括存储器电路系统,其分别实现用于维持信息(例如,指示所保留资源、阈值、参数等等的信息)的存储器组件340、386和396(例如,各自包括存储器设备)。存储器组件340、386和396因此可提供用于存储的装置、用于检索的装置、用于维持的装置等。在一些情形中,ue 302、基站304和网络实体306可分别包括定位组件342、388和398。定位组件342、388和398分别可以是作为处理系统332、384和394的一部分或与其耦合的硬件电路,这些硬件电路在被执行时使得ue 302、基站304和网络实体306执行本文所描述的功能性。在其他方面,定位组件342、388和398可以在处理系统332、384和394的外部(例如,调制解调器处理系统的一部分、与另一处理系统集成等等)。替换地,定位组件342、388和398分别可以是存储在存储器组件340、386和396中的存储器模块,这些存储器模块在由处理系统332、384和394(或调制解调器处理系统、另一处理系统等)执行时使得ue 302、基站304和网络实体306执行本文所描述的功能性。图3a解说了定位组件342的可能位置,该定位组件342可以是wwan收发机310、存储器组件340、处理系统332、或其任何组合的一部分,或者可以是自立组件。图3b解说了定位组件388的可能位置,该定位组件388可以是wwan收发机350、存储器组件386、处理系统384、或其任何组合的一部分,或者可以是自立组件。图3c解说了定位组件398的可能位置,该定位组件398可以是(诸)网络接口390、存储器组件396、处理系统394、或其任何组合的一部分,或者可以是自立组件。
[0107]
ue 302可包括耦合到处理系统332的一个或多个传感器344,以提供用于感测或检测移动和/或取向信息的装置,该移动和/或取向信息独立于从由wwan收发机310、短程无线收发机320、和/或sps接收机330接收到的信号推导出的运动数据。作为示例,传感器344可包括加速度计(例如,微机电系统(mems)设备)、陀螺仪、地磁传感器(例如,罗盘)、高度计(例如,气压高度计)和/或任何其他类型的移动检测传感器。此外,传感器344可包括多个不同类型的设备并将它们的输出进行组合以提供运动信息。例如,(诸)传感器344可使用多轴
加速度计和取向传感器的组合来提供计算2d和/或3d坐标系中的定位的能力。
[0108]
另外,ue 302包括用户接口346,用户接口346提供用于向用户提供指示(例如,可听和/或视觉指示)和/或用于(例如,在用户致动感测设备(诸如按键板、触摸屏、话筒等)之际)接收用户输入的装置。尽管未示出,但基站304和网络实体306也可包括用户接口。
[0109]
更详细地参照处理系统384,在下行链路中,来自网络实体306的ip分组可被提供给处理系统384。处理系统384可以实现用于rrc层、分组数据汇聚协议(pdcp)层、无线电链路控制(rlc)层和媒体接入控制(mac)层的功能性。处理系统384可提供与系统信息(例如,主信息块(mib)、系统信息块(sib))广播、rrc连接控制(例如,rrc连接寻呼、rrc连接建立、rrc连接修改、以及rrc连接释放)、rat间移动性、以及ue测量报告的测量配置相关联的rrc层功能性;与报头压缩/解压缩、安全性(暗码化、暗码解译、完整性保护、完整性验证)、以及切换支持功能相关联的pdcp层功能性;与上层pdu的传递、通过自动重复请求(arq)的纠错、rlc服务数据单元(sdu)的级联、分段和重组、rlc数据pdu的重新分段、以及rlc数据pdu的重新排序相关联的rlc层功能性;以及与逻辑信道与传输信道之间的映射、调度信息报告、纠错、优先级处置、以及逻辑信道优先级排序相关联的mac层功能性。
[0110]
发射机354和接收机352可实现与各种信号处理功能相关联的层1(l1)功能性。包括物理(phy)层的层-1可包括传输信道上的检错、传输信道的前向纠错(fec)译码/解码、交织、速率匹配、映射到物理信道上、物理信道的调制/解调、以及mimo天线处理。发射机354基于各种调制方案(例如,二进制相移键控(bpsk)、正交相移键控(qpsk)、m相移键控(m-psk)、m正交振幅调制(m-qam))来处置至信号星座的映射。经译码和经调制的码元可随后被拆分成并行流。每个流随后可被映射到正交频分复用(ofdm)副载波,在时域和/或频域中与参考信号(例如,导频)复用,并且随后使用快速傅里叶逆变换(ifft)组合到一起以产生携带时域ofdm码元流的物理信道。该ofdm码元流被空间预编码以产生多个空间流。来自信道估计器的信道估计可被用来确定编码和调制方案以及用于空间处理。信道估计可从由ue 302传送的参考信号和/或信道状况反馈推导出。每个空间流随后可被提供给一个或多个不同的天线356。发射机354可用相应空间流来调制rf载波以供传输。
[0111]
在ue 302,接收机312通过其相应的天线316来接收信号。接收机312恢复调制到rf载波上的信息并将该信息提供给处理系统332。发射机314和接收机312实现与各种信号处理功能相关联的层1功能性。接收机312可对该信息执行空间处理以恢复出以ue 302为目的地的任何空间流。若有多个空间流以ue 302为目的地,则它们可由接收机312组合成单个ofdm码元流。接收机312随后使用快速傅里叶变换(fft)将该ofdm码元流从时域转换到频域。频域信号对ofdm信号的每个副载波包括单独的ofdm码元流。通过确定最有可能由基站304传送的信号星座点来恢复和解调每个副载波上的码元、以及参考信号。这些软判决可基于由信道估计器计算出的信道估计。这些软判决随后被解码和解交织以恢复出原始由基站304在物理信道上传送的数据和控制信号。这些数据和控制信号随后被提供给实现层3(l3)和层2(l2)功能性的处理系统332。
[0112]
在上行链路中,处理系统332提供传输信道与逻辑信道之间的解复用、分组重组、暗码解译、报头解压缩以及控制信号处理以恢复出来自核心网的ip分组。处理系统332还负责检错。
[0113]
类似于结合由基站304进行的下行链路传输所描述的功能性,处理系统332提供与
系统信息(例如,mib、sib)捕获、rrc连接、以及测量报告相关联的rrc层功能性;与报头压缩/解压缩和安全性(暗码化、暗码解译、完整性保护、完整性验证)相关联的pdcp层功能性;与上层pdu的传递、通过arq的纠错、rlc sdu的级联、分段和重组、rlc数据pdu的重新分段、以及rlc数据pdu的重新排序相关联的rlc层功能性;以及与逻辑信道与传输信道之间的映射、将mac sdu复用到传输块(tb)上、从tb解复用mac sdu、调度信息报告、通过混合自动重复请求(harq)的纠错、优先级处置、以及逻辑信道优先级排序相关联的mac层功能性。
[0114]
由信道估计器从由基站304传送的参考信号或反馈中推导出的信道估计可由发射机314用来选择恰适的编码和调制方案、以及促成空间处理。由发射机314生成的空间流可被提供给不同天线316。发射机314可用相应空间流来调制rf载波以供传输。
[0115]
在基站304处以与结合ue 302处的接收机功能所描述的方式相类似的方式来处理上行链路传输。接收机352通过其相应的天线356来接收信号。接收机352恢复调制到rf载波上的信息并将该信息提供给处理系统384。
[0116]
在上行链路中,处理系统384提供传输信道与逻辑信道之间的解复用、分组重组、暗码解译、报头解压缩、控制信号处理以恢复出来自ue 302的ip分组。来自处理系统384的ip分组可被提供给核心网。处理系统384还负责检错。
[0117]
为方便起见,ue 302、基站304和/或网络实体306在图3a-图3c中被示为包括可根据本文中描述的各种示例来配置的各种组件。然而将领会,所解说的框在不同设计中可具有不同功能性。
[0118]
ue 302、基站304和网络实体306的各种组件可分别在数据总线334、382和392上彼此通信。图3a-图3c的各组件可按各种方式来实现。在一些实现中,图3a-图3c的组件可实现在一个或多个电路(举例而言,诸如一个或多个处理器和/或一个或多个asic(其可包括一个或多个处理器))中。此处,每个电路可使用和/或纳入用于存储由该电路用来提供这一功能性的信息或可执行代码的至少一个存储器组件。例如,由框310至346表示的功能性中的一些或全部功能性可由ue 302的处理器和存储器组件来实现(例如,通过执行恰适的代码和/或通过恰适地配置处理器组件)。类似地,由框350至388表示的功能性中的一些或全部功能性可由基站304的处理器和存储器组件来实现(例如,通过执行恰适的代码和/或通过恰适地配置处理器组件)。此外,由框390至398表示的功能性中的一些或全部功能性可由网络实体306的处理器和存储器组件来实现(例如,通过执行恰适的代码和/或通过恰适地配置处理器组件)。为了简单起见,各种操作、动作和/或功能在本文中被描述为“由ue”、“由基站”、“由网络实体”等来执行。然而,如将领会的,此类操作、动作、和/或功能实际上可由ue 302、基站304、网络实体306等等的特定组件或组件组合来执行,这些组件诸如处理系统332、384、394、收发机310、320、350和360、存储器组件340、386和396、定位组件342、388和398等。
[0119]
nr支持数个基于蜂窝网络的定位技术,包括基于下行链路的定位方法、基于上行链路的定位方法、以及基于下行链路和上行链路的定位方法。基于下行链路的定位方法包括:lte中的观察抵达时间差(otdoa)、nr中的下行链路抵达时间差(dl-tdoa)、以及nr中的下行链路出发角(dl-aod)。在otdoa或dl-tdoa定位规程中,ue测量从成对基站接收到的参考信号(例如,prs、trs、csi-rs、ssb等)的抵达时间(toa)之间的差值(被称为参考信号时间差(rstd)或抵达时间差(tdoa)测量),并且将这些差值报告给定位实体。更具体而言,ue在
辅助数据中接收参考基站(例如,服务基站)和多个非参考基站的标识符(id)。ue随后测量参考基站与每个非参考基站之间的rstd。基于所涉及基站的已知位置和rstd测量,定位实体可以估计ue的位置。对于dl-aod定位,基站测量被用于与ue进行通信的下行链路发射波束的角度和其他信道属性(例如,信号强度)以估计该ue的位置。
[0120]
基于上行链路的定位方法包括上行链路抵达时间差(ul-tdoa)和上行链路抵达角(ul-aoa)。ul-tdoa类似于dl-tdoa,但是ul-tdoa基于由ue传送的上行链路参考信号(例如,srs)。对于ul-aoa定位,基站测量被用于与ue进行通信的上行链路接收波束的角度和其他信道属性(例如,增益水平)以估计该ue的位置。
[0121]
基于下行链路和上行链路的定位方法包括:增强型蜂窝小区id(e-cid)定位和多往返时间(rtt)定位(也被称为“多蜂窝小区rtt”)。在rtt规程中,发起方(基站或ue)将rtt测量信号(例如,prs或srs)传送给响应方(ue或基站),该响应方将rtt响应信号(例如,srs或prs)传送回发起方。rtt响应信号包括rtt测量信号的toa与rtt响应信号的传送时间之间的差值(被称为接收至传送(rx-tx)测量)。发起方计算rtt测量信号的传送时间与rtt响应信号的toa之间的差值(被称为“tx-rx”测量)。发起方与响应方之间的传播时间(也被称为“飞行时间”)可以从tx-rx测量和rx-tx测量来计算。基于传播时间和已知的光速,可以确定发起方与响应方之间的距离。对于多rtt定位,ue执行与多个基站的rtt规程以使得该ue的位置能够基于各基站的已知位置来三角定位。rtt和多rtt方法可与其他定位技术(诸如,ul-aoa和dl-aod)组合以提高位置准确性。
[0122]
e-cid定位方法基于无线电资源管理(rrm)测量。在e-cid中,ue报告服务蜂窝小区id、定时提前(ta)、以及所检测到的邻居基站的标识符、估计定时和信号强度。随后,基于该信息和基站的已知位置来估计ue的位置。
[0123]
为了辅助定位操作,位置服务器(例如,位置服务器230、lmf 270、slp 272)可向ue提供辅助数据。例如,辅助数据可包括:测量来自其的参考信号的基站(或基站的蜂窝小区/trp)的标识符、参考信号配置参数(例如,连贯定位子帧的数目、定位子帧的周期性、静默序列、跳频序列、参考信号标识符、参考信号带宽等)和/或适用于特定定位方法的其他参数。替换地,辅助数据可直接源自基站自身(例如,在周期性地广播的开销消息中等)。在一些情形中,ue自身可以能够检测邻居网络节点而无需使用辅助数据。
[0124]
在otdoa或dl-tdoa定位规程的情形中,辅助数据可进一步包括预期rstd值和相关联的不确定性、或围绕预期rstd的搜索窗口。在一些情形中,预期rstd的值范围可以是+/-500微秒(μs)。在一些情形中,当被用于定位测量的任何资源处于fr1中时,预期rstd的不确定性的值范围可以是+/-32μs。在其他情形中,当被用于(诸)定位测量的所有资源处于fr2中时,预期rstd的不确定性的值范围可以是+/-8μs。
[0125]
位置估计可通过其他名称来称呼,诸如定位估计、位置、定位、定位锁定、锁定等等。位置估计可以是大地式的并且包括坐标(例如,纬度、经度和可能的海拔),或者可以是市政式的并且包括街道地址、邮政地址、或某个其他口头上的位置描述。位置估计可进一步相对于某个其他已知位置来定义或以绝对项来定义(例如,使用纬度、经度和可能的海拔)。位置估计可包括预期误差或不确定性(例如,通过包括位置预期将以某个指定或默认的置信度被包含在其内的面积或体积)。
[0126]
图4是解说基站(bs)402(可对应于本文描述的任何基站)与ue 404(可对应于本文
描述的任何ue)通信的示图400。参照图4,基站402可以在一个或多个发射波束402a、402b、402c、402d、402e、402f、402g、402h上向ue 404传送经波束成形信号,该一个或多个发射波束各自具有可由ue 404用来标识相应波束的波束标识符。在基站402使用单个天线阵列(例如,单个trp/蜂窝小区)朝向ue 404进行波束成形的情况下,基站402可以通过以下操作来执行“波束扫掠”:发射第一波束402a、然后发射波束402b并以此类推,直到最后发射波束402h。替代地,基站402可以按某一模式发射波束402a
–
402h,诸如波束402a,然后波束402h,然后波束402b,然后波束402g,等等。在基站402使用多个天线阵列(例如,多个trp/蜂窝小区)朝向ue 404进行波束成形的情况下,每个天线阵列可以执行波束402a
–
402h的子集的波束扫掠。替代地,波束402a-402h中的每一者可以对应于单个天线或天线阵列。
[0127]
图4进一步解说分别在波束402c、402d、402e、402f和402g上传送的经波束成形信号所遵循的路径412c、412d、412e、412f和412g。每个路径412c、412d、412e、412f、412g可对应于单个“多径”,或者由于射频(rf)信号通过环境的传播特性,可包括多个“多径”(“多径”群集)。注意,尽管仅示出了用于波束402c-402g的路径,但这是为了简单起见,并且在每个波束402a-402g上传送的信号将遵循某一路径。在所示出的示例中,路径412c、412d、412e和412f是直线,而路径412g从障碍物420(例如,建筑物、交通工具、地形特征等)反射离开。
[0128]
ue 404可在一个或多个接收波束404a、404b、404c、404d上从基站402接收经波束成形信号。注意到,为了简单起见,图4中解说的波束表示发射波束或接收波束,这取决于基站402和ue 404中的哪一者正在进行传送以及哪一者正在进行接收。由此,ue 404还可以在波束404a
–
404d中的一个或多个波束上向基站402传送经波束成形信号,并且基站402可以在波束402a
–
402h中的一个或多个波束上从ue 404接收经波束成形信号。
[0129]
在一方面,基站402和ue 404可执行波束训练以对齐基站402和ue 404的发射波束和接收波束。例如,取决于环境状况和其他因素,基站402和ue 404可确定最佳发射波束和接收波束分别为402d和404b或者分别为波束402e和404c。针对基站402的最佳发射波束的方向可以与最佳接收波束的方向相同或不同,同样针对ue 404的最佳接收波束的方向可以与最佳发射波束的方向相同或不同。然而,注意,对齐发射和接收波束并非是执行下行链路出发角(dl-aod)或上行链路抵达角(ul-aoa)定位规程所必需的。
[0130]
为了执行dl-aod定位规程,基站402可以在波束402a-402h中的一个或多个波束上向ue 404传送参考信号(例如,prs、crs、trs、csi-rs、pss、sss等),其中每个波束具有不同的发射角。波束的不同发射角将导致ue 404处的不同收到信号强度(例如,rsrp、rsrq、sinr等)。具体地,对于更远离基站402和ue 404之间的视线(los)路径410的发射波束402a-402h,收到信号强度将比距离los路径410更近的发射波束402a-402h更低。
[0131]
在图4的示例中,如果基站402在波束402c、402d、402e、402f和402g上向ue 404传送参考信号,则发射波束402e与los路径410最佳地对齐,而发射波束402c、402d、402f和402g不与los路径410最佳地对齐。如此,波束402e在ue 404处可能具有比波束402c、402d、402f和402g更高的收到信号强度。注意到,在一些波束(例如,波束402c和/或402f)上传送的参考信号可能不会到达ue 404,或者从这些波束到达ue 404的能量可能如此之低以至于能量可能无法检测或者至少可被忽略。
[0132]
ue 404可向基站402报告每个被测发射波束402c-402g的收到信号强度,以及可选地,相关联的测量质量,或者替换地,具有最高收到信号强度的发射波束的身份(在图4的示
例中为波束402e)。附加地或替换地,在ue 404还分别参与和至少一个基站402或多个基站402的往返时间(rtt)或抵达时间差(tdoa)定位会话的情况下,ue 404可分别向服务基站402或其他定位实体报告接收到传输(rx-tx)或参考信号时间差(rstd)测量(以及可选地相关联的测量质量)。在任何情形中,定位实体(例如,基站402、位置服务器、第三方客户端、ue 404等)可将从基站402到ue 404的角度估计为在ue 404处具有最高收到信号强度的发射波束(这里是发射波束402e)的aod。
[0133]
在基于dl-aod的定位的一个方面,其中仅存在一个所涉及的基站402,基站402和ue 404可执行往返时间(rtt)规程以确定基站402和ue 404之间的距离。因此,定位实体可确定到ue 404的方向(使用dl-aod定位)和到ue 404的距离(使用rtt定位)两者以估计ue 404的位置。注意到,具有最高收到信号强度的发射波束的aod不一定沿los路径410定位,如图4中所示。然而,出于基于dl-aod的定位目的,假定这样做。
[0134]
在基于dl-aod的定位的另一个方面,其中存在多个所涉及的基站402,每个基站402可将所确定的到ue 404的aod报告给定位实体。定位实体从用于ue 402的多个所涉及的基站404(或其他地理上分离的传送点)接收多个此类aod。通过该信息以及基站402的地理位置的知识,定位实体可将ue 404的位置估计为接收到的aod的交叉点。对于二维(2d)位置解决方案,应该存在至少两个所涉及基站402,但是如将领会的,定位规程中所涉及基站402越多,ue 404的所估计位置将越准确。
[0135]
为了执行ul-aoa定位规程,ue 404在上行链路发射波束404a-404d中的一者或多者上向基站402传送上行链路参考信号(例如,ul-prs、srs、dmrs等)。基站402在上行链路接收波束402a-402h中的一者或多者上接收上行链路参考信号。基站402将用于从ue 404接收一个或多个参考信号的接收波束402a
–
402h中的最佳波束的角度确定为从其自身到ue 404的aoa。具体而言,接收波束402a-402h中的每一个波束将得到基站402处的一个或多个参考信号的不同收到信号强度(例如,rsrp、rsrq、sinr等)。进一步,对于更远离基站402和ue 404之间的实际los路径的接收波束402a-402h,一个或多个参考信号的信道冲击响应将小于更靠近该los路径的接收波束402a-402h。同样,对于更远离los路径的接收波束402a-402h,收到信号强度将低于更接近该los路径的接收波束402a-402h。如此,基站402标识得到最高收到信号强度以及可选地最强信道冲击响应的接收波束402a-402h,并将从其自身到ue 404的角度估计为该接收波束402a-402h的aoa。注意,如同基于dl-aod的定位那样,得到最高收到信号强度(和在测量的情况下的最强信道冲击响应)的接收波束402a
–
402h的aoa不一定沿los路径410定位。然而,出于基于ul-aoa的定位目的,假定这样做。
[0136]
注意到,虽然ue 404被解说为能够进行波束成形,但这对于dl-aod和ul-aoa定位规程而言不是必需的。相反,ue 404可在全向天线上进行接收和传送。
[0137]
在ue 404正在估计其位置(即,ue是定位实体)的情况下,需要获得基站402的地理位置。ue 404可从例如基站402自身或位置服务器(例如,位置服务器230、lmf 270、slp 272)获得位置。利用到基站402的距离(基于rtt或定时提前)、基站402和ue 404之间的角度(基于最佳接收波束402a-402h的ul-aoa)以及基站402的已知地理位置的知识,ue 404能够估计其位置。
[0138]
替换地,在定位实体(诸如基站402或位置服务器)正在估计ue 404的位置的情况下,基站402报告得到从ue 404接收到的参考信号的最高收到信号强度(以及可选地最强信
道冲击响应)的接收波束402a
–
402h的aoa,或针对所有接收波束502的所有收到信号强度和信道冲击响应(这允许定位实体确定最佳接收波束402a
–
402h)。基站402可以附加地报告到ue 404的距离。定位实体可随后基于ue 404到基站402的距离、所标识的接收波束402a
–
402h的aoa以及基站402的已知地理位置来估计ue 404的位置。
[0139]
存在用于增强基于角度的定位方法(例如,dl-aod、ul-aoa)的各种动机。例如,测得信号的带宽不显著影响基于角度的方法的精度。作为另一示例,基于角度的方法对网络同步误差不敏感。作为又一示例,大规模mimo在fr1和fr2两者中可用,藉此实现角度测量。作为另一示例,dl-aod对于基于ue的定位受到支持,并且ul-aoa可自然地补充rtt或基于上行链路的定位方法而没有附加开销。
[0140]
图5是解说根据本公开的各方面的与基于下行链路角或上行链路角的定位方法(例如,dl-aod、ul-aoa)相关联的定位误差类型的示图。在图5的示例中,基站502(例如,本文所描述的任何基站)正朝向ue 504(例如,本文所描述的任何ue)进行波束成形。基站502可在多个波束510上向ue 504传送下行链路参考信号(例如,prs)和/或从ue 504接收上行链路参考信号(例如,srs)。在前一情形中,波束510可以是下行链路发射波束,并且在后一情形中,波束510可以是上行链路接收波束。
[0141]
如图5中所示,ue 504的位置在由蜂窝小区的半径(即,基站502与ue 504之间的距离)以及用于与ue 504进行通信的最佳波束510的角度和宽度定义的圆周上。ue 504的位置因此可基于基站502的位置、蜂窝小区半径以及最佳波束510的角度和宽度来估计。然而,ue 504的估计位置经受不同类型的误差。具体地,存在角度估计误差(即,最佳波束510的估计角度的误差)以及沿圆周的定位误差(即,ue 504在由最佳波束510的角度和宽度定义的圆周上的位置的误差)。
[0142]
以下的表解说了基于不同角度估计误差的示例定位误差(沿圆周)。具体地,各行示出了给定特定角度误差(最左列)和蜂窝小区半径的定位误差。最后一行示出了每一示例蜂窝小区半径的隐含标准差(isd)。
[0143][0144]
表1
[0145]
如以上表1中所示,角度准确性(或角度误差)应当在几度以内以提供对定位准确性的明显影响。例如,如表1中所示,在200米isd下,角度误差应当在一度到两度以内以使定位误差保持在三米以下。
[0146]
图6是解说根据本公开的各方面的dl-aod的其他方面的示图600。在图6的示例中,
trp 602(例如,本文所描述的任何基站的trp)正朝向ue 604(例如,本文所描述的任何ue)进行波束成形。trp 602可在多个下行链路发射波束(被标记为“1”、“2”、“3”、“4”和“5”)上向ue 604传送下行链路参考信号(例如,prs)。
[0147]
在方位角域中ue 604围绕trp 602的每一潜在位置可以被表示为φk。为简明起见,图6仅解说了ue 604围绕trp 602的四个可能位置,标示为φ1、φ2、φ3和φn。对于dl-aod定位会话,ue 604测量来自trp 602的每一可检测下行链路发射波束的信号强度(例如,rsrp)。trp 602与所解说的ue 604位置之间的每一条线上的圆圈点指示可测波束上将取得信号强度测量的位置。即,圆圈表示ue 604将针对与线相交的每一波束测量的相对信号强度,其中圆圈越接近ue 604指示越高的信号强度。
[0148]
对于ue 604可能位于的每一潜在φk∈[φ1,...,φn],并且对于正被传送的每一波束l∈[1,...,n
波束
],trp 602计算ue 604处的预期信号强度/收到功率p
i,k
。trp 602针对每一k∈[1,...n]推导归一化向量pk为:
[0149][0150]
trp 602接着在下行链路发射波束上向ue 604传送prs资源。每一波束可对应于不同的prs资源,或者相同的prs可在每一波束上传送,或者其某种组合。ue 604可报告至多达八个rsrp,其中针对每一prs资源一个rsrp。trp 602(或其他定位实体)将标示为归一化rsrp的收到向量,并且找到导致接近于的
[0151]
为了推导向量所涉及的基站需要向位置服务器或ue(即,定位实体)报告这些向量或报告针对每一prs资源的波束响应。图7是解说在方位角域中trp 702(例如,本文所描述的任何基站的trp)朝向ue 704(例如,本文所描述的任何ue)的可能位置传送第一prs资源(标记为“prs1”)的示图700。图8是解说在方位角域中来自图7的prs1的波束响应的图形。波束响应是由基站(此处为trp 702)传送的波束的形状。图形800的水平轴表示方位角(以度为单位)并且垂直轴表示波束响应(归一化到
‘1’
)。
[0152]
图9是解说在方位角域中trp 902(例如,本文所描述的任何基站的trp)朝向ue 904(例如,本文所描述的任何ue)的可能位置传送第二prs资源(标记为“prs2”)的示图900。图10是解说在方位角域中来自图9的prs2的波束响应的图形1000。图形1000的水平轴表示方位角(以度为单位)并且垂直轴表示波束响应(归一化到
‘
1)。’[0153]
图11是解说在方位角域中三个不同prs的波束响应的图形1100。即,图形1100解说了基站在其上传送dl-prs的三个下行链路波束的波束形状。图形1100的水平轴表示方位角(以度为单位)并且垂直轴表示波束响应(归一化到
‘1’
)。对于每一方位角角度,相对波束响应是正被用于对照所报告的相对rsrp进行比较的信息。例如,在方位角域中位于-20度处的ue将预期报告三个下行链路发射波束的rsrp值,其对应于所解说的波束响应上与-20度的垂直线相交的点。注意,ue可以不报告准确的预期rsrp值,但是其报告的一系列rsrp值应当
能够基于波束响应而匹配到方位角域中的位置,此处为-20度。即,ue可以报告一系列rsrp值,并且定位实体可基于所报告的rsrp测量与测得下行链路发射波束的波束响应一致的位置(例如,图11中的-20度)来确定方位角域中ue的位置。
[0154]
由此,定位实体需要知晓下行链路发射波束的波束响应以便确定波束响应上对应于测得rsrp的点。已经提出了用于向定位实体报告下行链路发射波束的波束响应(被称为“波束形状辅助信息”)的不同选项。作为第一选项,基站可报告针对每一可能角度的其中p是预期接收功率(例如,rsrp),n是角度数目,并且k是角度索引。具体地,基站可报告角度列表(aod和/或aoa、或者天顶出发角(zod)和/或天顶抵达角(zoa)、或者aod和/或aoa与zod和/或zoa的组合)。对于每一角度,基站可报告该角度下的prs资源标识符列表以及辐射功率(密度)列表,每一辐射功率与prs资源标识符相关联。作为第二选项,基站可报告每一prs资源跨aod和/或zod的波束响应。具体地,基站可报告prs资源标识符列表。对于每一prs资源标识符,基站可报告角度列表(aod和/或aoa、或者zod和/或zoa、或者aod和/或aoa以及zod和/或zoa的组合)以及prs资源的辐射功率(密度)列表,每一辐射功率与该角度相关联。
[0155]
本公开的至少一个方面涉及用于减少包含波束形状辅助信息的波束响应/形状报告(也被称为“波束响应报告”或“波束形状报告”或简称为“波束报告”)所需的信令量的技术。作为一个示例,基站可传送八个prs资源并且需要在方位角和天顶角(仰角)域中针对120度的范围报告每0.5度的角度粒度。每一值五个比特(提供1db粒度)导致常规波束响应/形状报告大小为每trp 2.3兆字节(mb)(即5*8*240*240=2.3mb)。这一波束响应报告大小对于基站到位置服务器的报告(如针对ue辅助式定位)可以是可准许的,但是对于到ue的空中(ota)信令(如在基于ue的定位中在ue是定位实体的情况下)而言太大了。
[0156]
相应地,本公开的至少一个方面涉及在波束报告中仅包括波束响应/形状的最显著部分。这能够显著减小信令开销并且仅具有较小的性能影响。例如,基站可仅报告波束响应中增益在波束响应的主峰的
‘
x’db内的角度(例如,在图10的示例中高于归一化增益0.1的任何角度或在约-3到-15度)。
‘
x’的值可以是可配置的。例如,
‘
x’的值可由操作、维护和管理(oam)配置决定,并且可被发信号通知给所有所涉及的实体(例如,所涉及的基站/trp、ue、和/或位置服务器)。
[0157]
经截短(或经减小)的波束响应/形状可按不同方式来发信号通知/报告。作为第一信令格式,波束报告可将经截短的波束响应表示为元组的集合(例如,表格),元组表示具有大于或等于
‘
x’的增益值的每一方位角角度和仰角角度下的增益值。即,对于波束响应中具有大于
‘
x’的增益的部分,波束报告将包括{方位角角度,仰角角度,增益}元组的集合,其中每一元组指示特定方位角和仰角角度递增(例如,0.5度)下波束响应的增益。因而,例如,如果需要五个比特来表示增益值,存在八个要报告的prs资源,方位角和仰角角度的范围是10度,并且角度报告粒度(或量化)是0.5度,则报告大小将是针对增益值的16千字节(kb)(即,5*8*20*20=16kb)加上表示80个角度值(即,0.5度递增下的20个方位角角度和20个仰角角度)所需的比特数目。此第一信令格式具有两个附加字段的增大开销(方位角和仰角字段)但是在所报告的波束宽度非常小(例如,几度)的情况下是有益的。
[0158]
作为第二信令格式,波束报告可包括最小和最大方位角角度、最小和最大仰角角度、以及针对那些最小和最大角度之间的方位角和仰角角度的波束增益的矩阵。最小和最
大角度是在它们之间波束响应的增益值大于或等于
‘
x’的那些角度。矩阵可以是二维(2d)矩阵,其具有表示方位角角度的一个轴以及表示仰角角度的另一轴。每一轴将表示从最小角度到最大角度的角度值。这些轴可具有预定义的粒度(或量化),诸如0.5度。因而,例如,对于从-30度到-20度的角度范围(即10度),矩阵将具有20行和20列(各自表示0.5-度递增下的10个角度)。此信令格式相对于第一信令格式减少了开销,因为仅报告了针对方位角和仰角的最小和最大角度值而非每一增益值的方位角和仰角角度。ue经由某一配置(例如,在适用标准、较高层信令等中指定)将知晓角度粒度并且因此将知晓如何解读增益值的矩阵。因而,例如,如果需要五个比特来表示增益值,存在八个要报告的prs资源,最小角度值与最大角度值之间存在20度差,并且粒度为0.5度,则报告大小将是针对增益值的64kb(即,5*8*40*40=64kb)加上表示四个角度值(即,两个最大角度值和两个最小角度值)所需的比特数目。
[0159]
作为第三信令格式,波束报告可针对波束响应的显著部分使用第一或第二信令格式,接着包括几个其他稀疏{方位角角度,仰角角度,增益}元组来更好地捕捉波束形状的特征。例如,参考图10,波束报告可针对具有大于0.1的归一化增益的角度值(约-3度到-15度)使用第一或第二信令格式。波束报告接着可包括几个其他{方位角角度,仰角角度,增益}元组来捕捉在约-22、5、12和20度处的较小的峰。
[0160]
作为量化波束响应(或波束形状)的替换技术,如上所述,波束响应可使用基函数来报告。基函数是在给定某些参数的情况下可被用于近似波束响应/形状的函数。更具体地,基函数将某些参数作为输入(例如,波峰、波束宽度、波束角度、天线振子数目)并输出针对那些参数的波束响应/形状的近似。
[0161]
图12是其中trp 1202(例如,本文所描述的任何基站的trp)在六个下行链路发射波束(标记为“1”到“6”)上传送参考信号(例如,prs)的示例场景的示图1200。trp 1202可正朝向一个或多个ue 1204(例如,本文所描述的任何ue)对参考信号进行波束成形。在图12的示例中,每一波束的结构(例如,波束形状)是相同的,仅波束方向不同。注意,在波束上应用天线振子模式将改变有效波束模式。还要注意,离形成波束的天线面板的视轴越远,与视轴方向相比的波束宽度就越大,如图5中所示。因而,代替椭圆,波束形状将由圆锥体更准确地表示。
[0162]
图13是其中trp 1302(例如,本文所描述的任何基站的trp)在六个下行链路发射波束(标记为“1”到“6”)上传送参考信号(例如,prs)的示例场景的示图1300。trp 1302可正朝向一个或多个ue 1304(例如,本文所描述的任何ue)对参考信号进行波束成形。在图13的示例中,存在不同的波束形状的集合。具体地,在图13的示例中,波束“1”、“3”、“5”和“6”具有相同的形状,而波束“2”和“4”具有相同的形状。
[0163]
相同的基函数可被用于具有相同结构/形状的每一波束。因而,单个基函数可被用于图12中所解说的所有波束,而针对图13中所解说的波束将需要两个基函数(即,一个基函数用于波束“1”、“3”、“5”和“6”以及一个不同的基函数用于波束“2”和“4”)。
[0164]
(由基站或位置服务器)提供给ue的波束响应报告可包括用于具有相同形状的每一波束集的波束基函数、要被输入每一基函数的描述波束形状的一个或多个参数(例如,波峰、波束宽度、波束角度、天线振子数目)、每一波束的天线振子模式、以及从波束索引到波束形状及其相关联的参数的映射。
[0165]
基函数可以是经预定义的函数,诸如正弦函数(用于离散傅立叶变换(dft)波束)、高斯函数、小波函数等。基站可经由nr定位协议类型a(nrppa)或lte定位协议(lpp)类型a(lppa)信令向位置服务器发送不同的基函数、通过rrc或定位sib(pos-sib)信令向ue发送不同的基函数、或这两者。替换地,位置服务器可经由lpp信令向ue中继基函数。(诸)基函数被预期在本质上是静态的并且不随着时间变化(因为由该基函数表示的波束形状在给定相同的输入参数下应当是相同的)。由此,ue和/或位置服务器仅需要在定位会话期间接收(诸)基函数一次。
[0166]
如果使用基函数,则所有的基站的下行链路发射波束可被表示为基函数的线性组合。在一方面,波束i可被表示为由此,基站将仅需要发送基函数(f)以及参数集{a
ki
}(对于i=1到n)。如果基站使用经预定义的参数,则仅需要发送{a
ki
}(对于i=1到n)以及基函数类型(例如,正弦、高斯、小波等)。
[0167]
波束码本(或发射码本)包括码字集合,其中码字是应用于天线振子以便形成模拟波束的模拟相移值的集合或幅度加相移值的集合。在基于相位差的dl-aod中,码本被配置到ue,并且ue测量x个prs资源并(例如,从过采样的dft波束的网格中)选择单个dft波束以用于对与最早toa相对应的每一prs资源进行预编码。
[0168]
在基于相位差的dl-aod中,传送方设备发送多个prs资源,每一prs资源经由这些物理天线中的每一物理天线。在来自阵列中的天线的每一prs抵达接收方的单个天线时,由于每一prs从传送方行进的不同距离而与先前的prs产生相移,如图14中以图形示出的。图14描绘了根据本公开的一方面的天线布置1400。天线布置1400包括发射天线(或发射机)1402和1404以及接收天线(或接收机)1406。发射天线1402和1404分别传送由接收机1406测量的参考信号1408和1410。在图14中,每一参考信号的aod被标示为θ。
[0169]
在图14中示出的简单场景中,可以通过使用简单公式来测量prs资源之间的相位差来估计出发角。在图14中,无需知晓prs资源的波束响应。接收机1406仅需要知晓prs资源到物理天线的映射、以及trp(p,n,m)的均匀平面阵列(upa)配置(例如,对于csi-rs,在一些系统中存在针对单个面板受支持的13个配置)、天线1402-1404的相对距离d(dh和dv参数,例如,以完成dft索引到角度的映射)、以及过采样因子(q),例如:
[0170]
[0171]
表2:(n1,n2)和(o1,o2)的受支持配置
[0172]
就位置辅助数据开销而言,在一些设计中,每trp 11比特可以是足够的。例如,upa配置可以需要4比特,dh和dv可以需要4比特(例如,dh={0.5,0.8},dv={0.5,0.8,1,2}),并且q可以需要3比特(例如,q={1,2,4,8,16,32,64,128})。此类办法具有低开销。然而,prs资源可能是“未经预编码的”,以使得每一端口映射到upa上的物理天线。此类办法藉此在fr1场景中可能更适用。
[0173]
nr类型i单面板码本使用与用于其中存在至少4个天线端口的场景的lte码本类似的结构。即,nr类型i单面板码本是针对双极化2d upa定制的恒定模量dft码本。直观地,码本的构造可以用以下方式解释。
[0174]
其中被用于使用具有n个天线的单极化均匀线性阵列(ula)对单层传输进行预编码的预编码器向量的dft预编码器可以被定义为:
[0175][0176]
其中k=0,1,...qn-1是预编码器索引并且q是整数过采样因子。
[0177]
如果ue被提供有此类码本配置(如对于csi反馈已经实现的那样)并接收多个单端口prs资源(如对于基于rsrp的dl-aod方法已经需要的那样),则代替仅仅计算rsrp向量,ue将搜索使第一路径的收到功率最大化的码本的预编码矩阵指示符(pmi)(即,通过计算收到信道与经配置码本中的每一pmi的乘积,使用n个端口来推导延迟-角度响应,并且标识最早路径和针对该最早路径的最强峰值)。
[0178]
这与csi反馈规程类似。例如,在关于csi反馈的3gpp规程中,ue测量单csi-rs源的多个端口,并执行pmi扫掠以标识哪个pmi使频谱效率度量最大化,而在这一相位差dl-aod方法中,ue出于扫掠pmi的目的来测量多个端口(每一端口与不同的prs资源相关联)并标识对应于估计toa下的最大收到功率的pmi索引。此类方法将利用附加测量并使得ue能够报告已经与最早路径相关联的角度,而不仅仅是可以是在接收机处被加总的多个路径的结果的rsrp测量。
[0179]
可以通过将两个预编码器向量的克罗内克积取为来创建二维均匀平面阵列(upa)的对应预编码器向量。然后,将用于双极化upa的预编码器进行如下扩展
[0180][0181]
其中e
jφ
是两个正交极化之间的同相因子。各极化之间的最佳同相e
jφ
通常随频率变化,而最佳波束方向w
2d
(k,l)通常在整个csi报告频带上相同。
[0182]
考虑跨第l个码字的rx天线的码本w
l
相位向量,假定:
[0183][0184]
其中q是过采样因子。
[0185]
将第p个子阵列的估计信道的第n个时域抽头的跨rx天线的向量标示为对于第n个时域抽头,针对第p个子阵列计算收到能量如下
[0186][0187]
换言之,对于第n个收到时域抽头,ue可计算跨码本的所有经配置pmi的收到能量,并选择使收到能量最大化的pmi在ue辅助式dl-aod方法中,ue将报告对应于最早抽头的索引并且对于基于ue的dl-aod,ue使用dh的知识和ula配置如下将索引映射回角度
[0188][0189]
用于推导aod的此类办法可以被宽泛地表征为aod推导的“公式化”办法(例如,使用上述公式,ue可以推导aod的估计)。然而,此类推导可能是处理密集的并且可能增大定位等待时间。
[0190]
本公开的一个或多个方面藉此涉及(i)对一个或多个参考信号测量(例如,使参考信号在至少一个路径(诸如用于定位的最早路径或用于通信的与最高收到功率相关联的路径)上的收到功率最大化的一个或多个pmi、(诸)toa测量、(诸)rsrp测量等)或其组合以及(ii)与该一个或多个参考信号的传输相关联的一个或多个aod之间的映射。在一些设计中,此类映射可基于在现场测试的基础上被预配置的表和/或基于众包(例如,随时间)被动态配置,并且可因(诸)特定位置区域、(诸)特定trp等而异。此类方面可提供各种技术优势,诸如改进的aod估计准确性和/或等待时间,这进而可提供改进的ue定位估计准确性和/或等待时间。
[0191]
图15解说了根据本公开的各方面的示例性无线通信过程1500。在一方面,过程1500可以由ue 302执行。
[0192]
在1510,ue 302(例如,接收机312或322等)(例如,从网络组件,诸如服务gnb等)接收待测量的一个或多个参考信号的配置(例如,定时信息、资源、周期性等)。
[0193]
在1520,ue 302(例如,接收机312或322等)(例如,从网络组件,诸如服务gnb等)接收与待测量的参考信号相关联的一个或多个发射码本的配置。在一些设计中,每一发射码本可与多个pmi相关联。在一些设计中,一个或多个发射码本的配置可经由ota信令被直接接收。在其他设计中,用于推导一个或多个发射码本的信息可经由ota信令被接收,这一信息之后被ue 302用来推导(诸)发射码本。例如,ue 302可(例如,经由ota信令)接收发射天线配置,并且可接着基于发射天线配置来推导一个或多个发射码本。因此,在1520接收配置可以是直接的或间接的。
[0194]
在1530,ue 302(例如,接收机312或322、处理系统332等)基于一个或多个发射码
本来确定对该一个或多个参考信号的一个或多个测量。例如,一个或多个测量可包括使参考信号在至少一个路径(例如,诸如(诸)最早路径,其与定位相关)上的收到功率最大化的一个或多个pmi、或一个或多个相对rsrp测量、或一个或多个toa测量、或其组合。
[0195]
在1540,ue 302(例如,接收机312或322、处理系统332、定位组件342等)确定(i)对该一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射。在一些设计中,该映射可经由aod表中的查找来确定,该aod表在图15的过程1500之前由网络(例如,经由单播或广播位置辅助数据)向ue 302供应。
[0196]
在1550,ue 302(例如,发射机314或324、数据总线334等)向定位估计实体传送对该映射的指示。在一些设计中,定位估计实体可对应于该ue(例如,在此情形中,在1550的传输是通过数据总线从一个ue组件到另一ue组件的逻辑传递)、另一ue(例如,经由侧链路)、基站、位置管理功能(lmf)、或其组合。在一些设计中,在1550的传输可包括对(诸)测量被映射到的(诸)aod的(诸)指示。
[0197]
图16解说了根据本公开的各方面的示例性无线通信过程1600。在一方面,过程1600可由定位估计实体执行,定位估计实体诸如ue 302、bs 304(例如,集成在ran中的lmf)、核心网组件(诸如网络实体306(例如,lmf等)、位置服务器等)。
[0198]
在1610,ue 302(例如,接收机312或322、数据总线334等)从ue接收对(i)基于一个或多个发射码本对一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射的指示。在一些设计中,定位估计实体可对应于该ue(例如,在此情形中,在1610的接收是通过数据总线从一个ue组件到另一ue组件的逻辑传递)、另一ue(例如,经由侧链路)、基站、位置管理功能(lmf)、或其组合。在一些设计中,在1610的接收可包括对(诸)测量被映射到的(诸)aod的(诸)指示。
[0199]
在1620,定位估计实体(例如,定位组件342或388或398、处理系统332或384或394等)至少部分地基于该一个或多个aod来确定ue的定位估计。
[0200]
参考图15-16,在一些设计中,该映射可基于在现场测试的基础上被预配置的查找表和/或基于众包(例如,随时间)被动态配置,并且可因(诸)特定位置区域、(诸)特定trp、(诸)特定波束等而异。例如,特定测量或测量组合可提前与特定(诸)aod值或(诸)范围相关。接着,代替使用公式来基于测量值动态计算(诸)aod,ue可改为参照该表(或对恰适映射的某一其他指示)以将(诸)参考信号测量映射到相应的(诸)aod或(诸)aod范围。例如,在现场测试中,在网络运营商控制下的测试ue可被操纵到位置区域中的不同位置,其中测试ue执行测量,这些测量可与那些相应位置处的(诸)aod相关(例如,使用旧式公式化办法)。在另一示例中,作为此类现场测试的附加或替代,由订户操作的ue可在正常操作期间执行测量。此类测量可被包括或“众包”,并且可类似地与那些相应位置处的(诸)aod相关(例如,使用旧式公式化办法)。随着时间,这些相关(经由来自订户ue的众包或从测试ue获得的)可被用于生成(或提炼)上文提及的映射,这随后可被用来减少使用旧式公式化办法的进一步aod推导。
[0201]
参考图15-16,在一些设计中,一个或多个参考信号包括一个或多个侧链路(sl)参考信号(例如,来自另一ue)。在其他设计中,一个或多个参考信号包括一个或多个下行链路(dl)信号(例如,来自服务gnb或非服务gnb)。
[0202]
参考图15-16,在一些设计中,该映射可以是与一个或多个参考信号的接收相关联的不同测量以及与一个或多个参考信号的传输相关联的不同的相应一个或多个aod之间的多个映射中的一者。考虑其中映射是经由查找表实现的示例。表中的每一条目可被索引到特定测量或测量组合,其进而与不同的相应(诸)aod或(诸)aod范围相关联。
[0203]
参考图15-16,在一些设计中,每一测量使用与一个或多个发射码本以及一个或多个参考信号相关联的至少一个或多个pmi来推导。作为示例,一个或多个测量可包括对使参考信号在至少一个路径(例如,用于定位的最早路径、或用于通信的最高收到功率路径)上的收到功率最大化的一个或多个pmi的(诸)指示。在其他示例中,(诸)测量可包括一个或多个相对rsrp测量、一个或多个toa测量、或其组合。在一特定示例中,(诸)测量可包括:
[0204]
·
一个或多个pmi,或者
[0205]
·
一个或多个pmi和(诸)相对rsrp,或者
[0206]
·
一个或多个pmi和(诸)toa测量,或者
[0207]
·
一个或多个pmi和(诸)相对rsrp和(诸)toa测量,或者
·
上述各项的组合
[0208]
参考图15-16,在一些设计中,(诸)测量被映射到的一个或多个aod可包括:
[0209]
·
单个方位角aod或方位角aod的单个范围,或者
[0210]
·
多个方位角aod或方位角aod的多个范围,或者
[0211]
·
单个天顶角aod或天顶角aod的单个范围,或者
[0212]
·
多个天顶角aod或天顶角aod的多个范围,或者
[0213]
·
单个天顶角和方位角aod或天顶角和方位角aod的单个范围,或者
[0214]
·
多个天顶角和方位角aod或天顶角和方位角aod的多个范围,或者
[0215]
·
以上各项的组合
[0216]
在一些设计中,多个aod或多个aod范围可针对其中每一aod(或aod范围)与相应参考信号的不同路径相关联的场景来指示。更具体地,在一示例中,多个方位角aod、多个天顶角aod、多个天顶角和方位角aod、方位角aod的多个范围、天顶角aod的多个范围、和/或天顶角和方位角aod的多个范围可与一个或多个参考信号的不同多径相关联。
[0217]
参考图15-16,在一些设计中,该映射可经由单播或广播位置辅助数据(例如,在广播的情形中定位sib)被配置在ue处。例如,在aod查找表示例中,aod查找表(其可包括任何数目的测量到aod映射)可被包括在单播或广播位置辅助数据中。在一些设计中,该映射(例如,aod查找表)经由新无线电定位协议a(nrppa)信令被传送到位置管理功能(lmf)。在此情形中,在1610接收的指示不必包括对(诸)aod的明确引述,而是可包括引述信息(例如,lmf可用来执行其自己的aod映射的(诸)测量)。在任一情形(例如,明确aod引述或经由lmf实现的映射的隐式aod引述)中,lmf(或其他定位估计实体)能够根据映射指示来确定(诸)aod。
[0218]
参考图15-16,在一些设计中,对于一些(诸)其他参考信号测量,ue可实现基于公式的aod计算来代替基于映射的aod查找。例如,可能存在其中已经执行了不足量的众包和/或现场测试来推导测量到aod映射的场景,在此情形中可使用旧式公式化办法。在其他场景中,一些但不是全部测量(或测量组合)可具有映射。在此情形中,不适合经预定义的映射的(诸)测量可转而使用旧式公式化办法来处理。因此,在aod查找表的情形中,一些表条目可与映射相关联,而其他表条目(或缺少匹配的表条目)可指令ue实现旧式公式化办法来进行aod推导。
[0219]
参考图15-16,在一些设计中,一个或多个参考信号可包括用于定位的rs(rs-p)(例如,(诸)dl-prs、(诸)sl-prs等)、信道状态指示(csi)-rs、同步信号块(ssb)、跟踪rs(trs)、或解调rs(dmrs)。
[0220]
参考图15-16,在一些设计中,ue可被配置有码本并被配置成测量多个rs端口。在一示例中,ue可报告所选pmi(例如,其使一个或多个期望路径上的能量最大化)以及辅助式信息(例如,rsrp、toa、rstd、rx-tx测量等)。lmf可能不知晓如何将这些映射到实际角度,因为lmf可能不知晓gnb处使用的波束/预编码器。gnb可以知晓那些波束(其可以是专用的),并且仅发送从测量到角度的映射(例如,aod查找表)。如上所提及的,特定映射可包括映射到角度(或角度范围)的pmi集合。例如,这可对应于ue报告来自波束组合码本(例如,类型ii码本类型)的pmi的情形。
[0221]
参考图15-16,在一些设计中,该映射可被确定为使第一性能特性比第二性能特性加权更重。例如,第一性能特性可与传输的频谱效率相关联(例如,以挑选cqi以用于数据通信),与信道状态信息反馈(csf)中类似,并且第二性能特性可与信号传输的最早路径的rsrp(例如,rsrp的最大化)相关联,并且一个或多个参考信号可与数据通信相关联(例如,因为频谱效率被优先化)。在另一示例中,第二性能特性可与传输的频谱效率相关联并且第一性能特性与信号传输的最早路径的rsrp相关联,并且一个或多个参考信号可与ue的定位相关联(例如,因为最早路径被优先化)。例如,可以配置相同测量数据的不同映射。如果ue正在执行定位测量,则ue将使用与定位相关联的映射,并且如果ue正在执行参考信号测量以促成数据通信,则ue将使用与通信相关联的映射。在一些设计中,不同映射在一些设计中可经由aod查找表中的差分角度值来区分(例如,角度#1是针对定位测量来指示的,其中在通信测量的情形中偏移#1要被应用于角度#1)。
[0222]
在以上详细描述中,可以看到在各示例中不同的特征被分组在一起。这种公开方式不应被理解为示例条款具有比每一条款中所明确提及的特征更多的特征的意图。相反,本公开的各个方面可包括少于所公开的个体示例条款的所有特征。因此,所附条款由此应该被认为是被纳入到该描述中,其中每一条款自身可为单独的示例。尽管每个从属条款在各条款中可以引用与其他条款之一的特定组合,但该从属条款的(诸)方面不限于该特定组合。将领会,其他示例条款还可包括从属条款(诸)方面与任何其它从属条款或独立条款的主题内容的组合或者任何特征与其他从属和独立条款的组合。本文所公开的各个方面明确包括这些组合,除非显式地表达或可以容易地推断出并不旨在特定的组合(例如,矛盾的方面,诸如将元件同时定义为绝缘体和导体)。此外,还旨在使条款的各方面可被包括在任何其他独立条款中,即使该条款不直接从属于该独立条款。
[0223]
在以下经编号条款中描述了各实现示例:
[0224]
条款1。一种操作用户装备(ue)的方法,包括:接收待测量的一个或多个参考信号的配置;接收与待测量的参考信号相关联的一个或多个发射码本的配置;基于一个或多个发射码本来确定对该一个或多个参考信号的一个或多个测量;确定(i)对一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射;以及向定位估计实体传送对该映射的指示。
[0225]
条款2。如条款1的方法,其中该映射基于与一个或多个测试用户装备(ue)相关联地执行的现场测试,或者其中该映射基于与一个或多个ue相关联地众包,或者其组合。
[0226]
条款3。如条款1到2中任一者的方法,其中该定位估计实体对应于该ue、另一ue、基站、位置管理功能(lmf)、或其组合。
[0227]
条款4。如条款1到3中任一者的方法,其中该一个或多个参考信号包括一个或多个侧链路(sl)参考信号,或者其中该一个或多个参考信号包括一个或多个下行链路(dl)信号。
[0228]
条款5。如条款1到4中任一者的方法,其中该映射是与该一个或多个参考信号的接收相关联的不同测量以及与该一个或多个参考信号的传输相关联的不同的相应一个或多个aod之间的多个映射中的一者。
[0229]
条款6。如条款1到5中任一者的方法,其中每一测量使用与该一个或多个发射码本以及该一个或多个参考信号相关联的至少一个或多个预编码矩阵指示符(pmi)来推导。
[0230]
条款7。如条款1到6中任一者的方法,其中该一个或多个测量包括:使参考信号在至少一个路径上的收到功率最大化的一个或多个预编码矩阵指示符(pmi)、或一个或多个相对参考信号收到功率(rsrp)测量、或一个或多个抵达时间(toa)测量、或其组合。
[0231]
条款8。如条款1到7中任一者的方法,其中该一个或多个aod包括:单个方位角aod或方位角aod的单个范围、或者多个方位角aod或方位角aod的多个范围、或者单个天顶角aod或天顶角aod的单个范围、或者多个天顶角aod或天顶角aod的多个范围、或者单个天顶角和方位角aod或天顶角和方位角aod的单个范围、或者多个天顶角和方位角aod或天顶角和方位角aod的多个范围、或其组合。
[0232]
条款9。如条款8的方法,其中多个方位角aod、多个天顶角aod、多个天顶角和方位角aod、方位角aod的多个范围、天顶角aod的多个范围、和/或天顶角和方位角aod的多个范围与该一个或多个参考信号的不同多径相关联。
[0233]
条款10。如条款1到9中任一者的方法,其中该映射经由单播或广播位置辅助数据被配置在该ue处。
[0234]
条款11。如条款1到10中任一者的方法,其中该映射经由新无线电定位协议a(nrppa)信令被传送到位置管理功能(lmf)。
[0235]
条款12。如条款1到11中任一者的方法,进一步包括:针对一个或多个其他参考信号测量执行基于公式的aod计算来代替基于映射的aod查找。
[0236]
条款13。如条款1到12中任一者的方法,其中该一个或多个参考信号包括用于定位的参考信号(rs-p)、信道状态指示(csi)-rs、同步信号块(ssb)、跟踪rs(trs)、或解调rs(dmrs)。
[0237]
条款14。如条款13的方法,其中该一个或多个参考信号包括下行链路定位参考信号(dl-prs),或者其中该一个或多个参考信号包括侧链路定位参考信号(sl-prs)。
[0238]
条款15。如条款1到14中任一者的方法,其中该映射被确定为使第一性能特性比第二性能能特性加权更重。
[0239]
条款16。如条款15的方法,其中第一性能特性与传输的频谱效率相关联并且第二性能特性与信号传输的最早路径的参考信号收到功率(rsrp)相关联,并且该一个或多个参考信号与数据通信相关联,或者其中第二性能特性与传输的频谱效率相关联并且第一性能特性与信号传输的最早路径的参考信号收到功率(rsrp)相关联,并且该一个或多个参考信号与ue的定位相关联。
[0240]
条款17。如条款1到16中任一者的方法,其中接收一个或多个发射码本的配置包括接收发射天线配置并基于发射天线配置来推导一个或多个发射码本。
[0241]
条款18。一种操作定位估计实体的方法,包括:从用户装备(ue)接收对(i)基于一个或多个发射码本对一个或多个参考信号的一个或多个测量以及(ii)与该一个或多个参考信号的传输相关联的一个或多个出发角(aod)之间的映射的指示;以及至少部分地基于该一个或多个aod来确定该ue的定位估计。
[0242]
条款19。如条款18的方法,其中该映射基于与一个或多个测试用户装备(ue)相关联地执行的现场测试,或者其中该映射基于与一个或多个ue相关联地众包,或者其组合。
[0243]
条款20。如条款18到19中任一者的方法,其中该定位估计实体对应于该ue、另一ue、基站、位置管理功能(lmf)、或其组合。
[0244]
条款21。如条款18到20中任一者的方法,其中该一个或多个参考信号包括一个或多个侧链路(sl)参考信号,或者其中该一个或多个参考信号包括一个或多个下行链路(dl)信号。
[0245]
条款22。如条款18到21中任一者的方法,其中该映射是与该一个或多个参考信号的接收相关联的不同测量以及与该一个或多个参考信号的传输相关联的不同的相应一个或多个aod之间的多个映射中的一者。
[0246]
条款23。如条款18到22中任一者的方法,其中每一测量使用与该一个或多个发射码本以及该一个或多个参考信号相关联的至少一个或多个预编码矩阵指示符(pmi)来推导。
[0247]
条款24。如条款18到23中任一者的方法,其中该一个或多个测量包括:使参考信号在至少一个路径上的收到功率最大化的一个或多个预编码矩阵指示符(pmi)、或一个或多个相对参考信号收到功率(rsrp)测量、或一个或多个抵达时间(toa)测量、或其组合。
[0248]
条款25。如条款18到24中任一者的方法,其中该一个或多个aod包括:单个方位角aod或方位角aod的单个范围、或者多个方位角aod或方位角aod的多个范围、或者单个天顶角aod或天顶角aod的单个范围、或者多个天顶角aod或天顶角aod的多个范围、或者单个天顶角和方位角aod或天顶角和方位角aod的单个范围、或者多个天顶角和方位角aod或天顶角和方位角aod的多个范围、或其组合。
[0249]
条款26。如条款18到25中任一者的方法,其中该映射经由单播或广播位置辅助数据被配置在该ue处。
[0250]
条款27。如条款18到26中任一者的方法,其中该一个或多个信号包括用于定位的参考信号(rs-p)、信道状态指示(csi)-rs、同步信号块(ssb)、跟踪rs(trs)、或解调rs(dmrs)。
[0251]
条款28。如条款27的方法,其中该一个或多个参考信号包括下行链路定位参考信号(dl-prs),或者其中该一个或多个参考信号包括侧链路定位参考信号(sl-prs)。
[0252]
条款29。一种装置,其包括:存储器和通信地耦合到该存储器的至少一个处理器,该存储器和该至少一个处理器被配置成执行根据条款1到28中任一者的方法。
[0253]
条款30。一种设备,包括用于执行根据条款1至28中任一者的方法的装置。
[0254]
条款31。一种存储计算机可执行指令的非瞬态计算机可读介质,这些计算机可执行指令包括用于使得计算机或处理器执行根据条款1至28中任一者的方法的至少一条指
令。
[0255]
本领域技术人员将领会,信息和信号可使用各种不同技术和技艺中的任何一种来表示。例如,贯穿上面说明始终可能被述及的数据、指令、命令、信息、信号、比特、码元和码片可由电压、电流、电磁波、磁场或磁粒子、光场或光粒子、或其任何组合来表示。
[0256]
此外,本领域技术人员将领会,结合本文中所公开的方面描述的各种解说性逻辑块、模块、电路、和算法步骤可被实现为电子硬件、计算机软件、或两者的组合。为清楚地解说硬件与软件的这一可互换性,各种解说性组件、块、模块、电路、以及步骤在上面是以其功能性的形式作一般化描述的。此类功能性是被实现为硬件还是软件取决于具体应用和施加于整体系统的设计约束。技术人员可针对每种特定应用以不同方式来实现所描述的功能性,但此类实现决策不应被解读为致使脱离本公开的范围。
[0257]
结合本文中公开的各方面所描述的各种解说性逻辑块、模块、以及电路可以用设计成执行本文所描述的功能的通用处理器、dsp、asic、fpga或其他可编程逻辑器件、分立的门或晶体管逻辑、分立的硬件组件、或其任何组合来实现或执行。通用处理器可以是微处理器,但在替换方案中,该处理器可以是任何常规的处理器、控制器、微控制器、或状态机。处理器还可以被实现为计算设备的组合,例如,dsp与微处理器的组合、多个微处理器、与dsp核心协同的一个或多个微处理器、或任何其他此类配置。
[0258]
结合本文所公开的各方面描述的方法、序列和/或算法可直接在硬件中、在由处理器执行的软件模块中、或在这两者的组合中体现。软件模块可驻留在随机存取存储器(ram)、闪存存储器、只读存储器(rom)、可擦除可编程rom(eprom)、电可擦除可编程rom(eeprom)、寄存器、硬盘、可移动盘、cd-rom或者本领域中所知的任何其他形式的存储介质中。示例存储介质耦合到处理器以使得该处理器能从/向该存储介质读写信息。在替换方案中,存储介质可被整合到处理器。处理器和存储介质可驻留在asic中。asic可驻留在用户终端(例如,ue)中。在替换方案中,处理器和存储介质可作为分立组件驻留在用户终端中。
[0259]
在一个或多个示例方面,所描述的功能可在硬件、软件、固件或其任何组合中实现。若在软件中实现,则各功能可以作为一条或多条指令或代码存储在计算机可读介质上或藉其进行传送。计算机可读介质包括计算机存储介质和通信介质两者,包括促成计算机程序从一地向另一地转移的任何介质。存储介质可以是能被计算机访问的任何可用介质。作为示例而非限定,此类计算机可读介质可包括ram、rom、eeprom、cd-rom或其他光盘存储、磁盘存储或其他磁存储设备、或能用于携带或存储指令或数据结构形式的期望程序代码且能被计算机访问的任何其他介质。同样,任何连接也被正当地称为计算机可读介质。例如,如果软件是使用同轴电缆、光纤电缆、双绞线、数字订户线(dsl)、或诸如红外、无线电、以及微波之类的无线技术从网站、服务器、或其他远程源传送的,则该同轴电缆、光纤电缆、双绞线、dsl、或诸如红外、无线电、以及微波之类的无线技术就被包括在介质的定义之中。如本文所使用的盘(disk)和碟(disc)包括压缩碟(cd)、激光碟、光碟、数字多用碟(dvd)、软盘和蓝光碟,其中盘(disk)往往以磁的方式再现数据,而碟(disc)用激光以光学方式再现数据。以上的组合应当也被包括在计算机可读介质的范围内。
[0260]
虽然前面的公开示出了本公开的解说性方面,但是应当注意,在其中可作出各种变更和修改而不会脱离如所附权利要求定义的本公开的范围。根据本文中所描述的本公开的各方面的方法权利要求中的功能、步骤和/或动作不必按任何特定次序来执行。此外,尽
管本公开的要素可能是以单数来描述或主张权利的,但是复数也是已料想了的,除非显式地声明了限定于单数。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1