一种无人机辅助NOMA网络的路径规划和功率分配方法
一种无人机辅助noma网络的路径规划和功率分配方法
技术领域
1.本发明涉及无线通信技术领域,具体涉及一种基于无人机辅助非正交多址(non-orthogonal multiple access,noma)网络的路径规划和功率分配联合优化方法。
背景技术:
2.第五代(the fifth generation,5g)和超过5g(beyond 5g,b5g)的无线网络在满足高可靠性和超高容量无线通信的需求方面面临挑战。基于mmwave的mimo通信作为5g/b5g网络的关键技术之一,可以大大提高频谱效率。
3.由于基于mmwave的mimo系统中硬件结构的约束和射频链的高成本,射频链的数量远远少于天线数量,导致连接用户数量受到。因此,多重访问技术被认为是支持大规模连接的最有前途的技术之一,特别是对于大规模的物联网连接。多址接入方案主要有两类,即oma技术和noma技术。与oma方案不同,noma技术允许多个用户共享相同的物理资源,可以在系统se方面实现更好的性能。
4.然而,当物联网设备位于农村和地理位置图形受限的地区时,使用bss来提供无线接入服务效率不高。无人机具有自主性、灵活性和移动性等优势,可以快速部署,为边缘物联网设备提供具有成本效益的无线服务。因此,无人机在基于mmwave的mimo-noma系统中的应用引起了人们的广泛关注。研究人员曾提出利用随机几何方法对基于mimo-noma的辅助无人机网络中的用户位置和干扰进行建模,给出了系统中断概率和遍历率的闭式表达式。为了保证无源地面接收机在使用swipt的无人机辅助noma网络中的安全传输,一种联合预编码优化方案被提出,其中对时间比、功率分配比以及预编码矢量进行了优化。波束扫描方法也受到研究人员的关注,通过优化波束扫描的方法以最大限度地提高无人机辅助noma网络的可达和率。可见提高基于无人机辅助物联网的无线通信网络的和速率是十分重要的。
5.现有技术中,hou等人采用随机几何方法对uav辅助mimo-noma系统中ue位置和干扰进行建模,并推导出系统中断概率和遍历速率的闭环表达式(hou t.,liu y.,song z.,et al.multiple antenna aided noma in uav networks:a stochastic geometry approach[j].ieee trans.commun.,2018,67(2):1031-1044.)。rupasinghe等人研究了一种波束扫描方案以最大化uav辅助noma网络的可达速率,并推导了中断概率和平均和速率的闭环表达式(nadisanka r.,yavuz y.,ismail g.,et al.non-orthogonal multiple access for mmwave drone networks with limited feedback[j].ieee trans.commun.,2018,67(1):762-777.)。上述现有技术均旨在于研究uav辅助mimo-noma网络的中断概率,但没有考虑uav的3d位置和功率分配对系统性能的影响。
技术实现要素:
[0006]
本发明通过联合优化无人机的三维位置、波束模式和传输功率等多变量,研究了基于多波束和功率分配的无人机辅助noma网络通信系统的和速率最大化问题。
[0007]
本发明的目的至少通过如下技术方案之一实现。
[0008]
一种基于无人机辅助noma网络的路径规划和功率分配联合优化方法,包括以下步骤:
[0009]
s1、构建基于多波束和功率分配的无人机辅助noma网络通信系统;
[0010]
s2、在基于多波束和功率分配的无人机辅助noma网络通信系统的基础上,建立信道模型,进而制定noma系统的收发策略;
[0011]
s3、制定系统和速率最大化问题,将无人机的三维布局、波束方向和发射功率三者结合起来进行优化系统和速率最大化;
[0012]
s4、对系统和速率最大化问题进行分解,分别优化无人机位置、波束图和无人机发射功率。
[0013]
进一步地,步骤s1中,构建毫米波(millimeter wave,mmwave)下基于多波束和功率分配的无人机辅助noma网络通信系统,具体如下:
[0014]
无人机在服务区域上空飞行,并在每个航路点同时向多个物联网设备传播数据;假设无人机的二维位置为zu=(xu,yu)矩形,高度为h;第k个物联网设备在地面的位置为zk=(xk,yk),k∈{1,2,...k};k为物联网设备的数量;
[0015]
每个无人机安装有m
×
n天线阵列,并且每个物联网设备都配备有单个天线;
[0016]
提出一个多波束方案合成多波束分别指向多个物联网设备,具体如下:
[0017]
将一个模拟波束形成(beamforming,bf)结构分离为多个子阵,每个子阵辐射出的波束方向由移相器的值决定;在模拟波束形成结构中,考虑了子阵中两个阵元之间的相互耦合,子阵间的相互耦合可以忽略。
[0018]
进一步地,步骤s2中,建立信道模型,具体如下:
[0019]
由于无人机可以在三维自由空间中灵活部署和移动,假设无人机与地面通道以los(line-of-sight,los)为主,无人机与第k个物联网设备之间的通道hk可以表示为:
[0020][0021]
其中,α表示路径损耗因子,α》2;dk为无人机与第k个物联网设备之间的距离,β0表示无人机与用户之间的距离d0=1m时的信道功率增益;
[0022]
设λ和d
array
分别表示相邻的天线单元之间的波长和间距,则m
×
n天线阵列的转向矢量a(θ,φ)与仰角θ和方位角φ的关系可以表示为:
[0023][0024]
其中,m和n分别m
×
n天线阵列中第m行第n列的天线单元;设w为波束形成向量,无人机与第k个物联网设备之间的有效信道增益可以表示为
[0025][0026]
其中,e(θ,φ)=ah(θ,φ)w是m
×
n天线阵列的合成图,w=[w
1n
,...,w
mn
,...,w
mn
]
t
,wmn
=p
mn
(θ,φ)i
mn
表示m
×
n天线阵列中第m行第n列的天线单元;表示m
×
n天线阵列中第m行第n列的天线单元的幅值激励和相位,p
mn
(θ,φ)和i
mn
分别表示m
×
n天线阵列中第m行第n列的天线单元的有源模式和幅值激励;表示无人机与第k个物联网设备之间的信道;h表示共轭转置;
[0027]
合成图e(θ,φ)可以等价表示为:
[0028][0029]
其中,β
mn
是可由移相器控制的渐进相移,以确定主波束方向;其中,β
mn
可通过moea/d算法获得;
[0030]
af表示m
×
n天线阵列的阵因子,
[0031]
进一步地,步骤s2中,noma系统的收发策略具体如下:
[0032]
无人机服务分为γ组,所有物联网设备共用同一副载波,基于此设计可以获得显著的性能收益;无人机向第k个物联网设备发送信号sk,发射功率为pk,则第k个物联网设备处接收到的信号可以表示为:
[0033][0034]
其中,nk~cn(0,σ2)表示第k个物联网设备处功率σ2的加性高斯白噪声(awgn);根据noma方案,采用连续干扰抵消(sic)对用户进行解码;为了不失一般性,假设||h1||<||h2||<
…
<||hk||;
[0035]
因此,k={1,2,...,k-1}时,第k个物联网设备的信噪比sinrk(signal-to-interferenceplus-noise-radio,sinr)表示为
[0036][0037]
第k个物联网设备的信噪比sinrk可以表示为:
[0038][0039]
将第k个物联网设备的可达率记为rk,具体如下:
[0040]rk
=log2(1+sinrk),k=1,2,...,k。
ꢀꢀ
(8)
[0041]
进一步地,步骤s3中,系统和速率最大化问题具体如下:
[0042]
本发明目标是最大化所有物联网设备的总和速率;由式(3)和式(6)可以看出,物联网设备的总和速率与无人机的三维位置、发射功率和波束模式有关;
[0043]
在数学上,系统和速率最大化问题p1可以表述为:
[0044][0045]
s.t.||z
k-zu||2≤h2tan2θ
ꢀꢀꢀꢀꢀꢀꢀꢀ
(10)
[0046]hmin
≤h≤h
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0047]rk
>rkꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0048][0049]
约束(10)中2θ表示光束的有效照度,约束(10)表示无人机与物联网设备之间的水平距离小于无人机的覆盖半径htanθ;
[0050]
约束(11)表示无人机高度的边界约束;
[0051]
约束(12)表示第k个物联网设备的传输速率rk不小于速率阈值rk;
[0052]
约束(13)为传输功率约束,其中p
max
为noma网络通信系统的总传输功率。
[0053]
这里的累加率最大化问题是一种混合组合非凸问题,将无人机的三维布局、波束方向和发射功率三者结合起来进行优化,因此难以解决。
[0054]
进一步地,步骤s4中,构建一种联合优化三维部署、波束图设计和功率分配的迭代算法,将系统和速率最大化问题分解为优化无人机位置、优化波束方向图和优化无人机发射功率三个子问题,包括以下步骤:
[0055]
s4.1、优化无人机的三维位置;
[0056]
s4.2、基于moea/d的波束方向图优化算法对波束方向图进行优化;
[0057]
s4.3、采用基于fp的次优化算法来优化无人机的发射功率。
[0058]
进一步地,步骤s4.1中,对于给定的固定的第k个物联网设备的发射功率pk和m
×
n天线阵列的合成图e(θ,φ),系统和速率最大化问题p1表示为第二问题p2,具体如下:
[0059][0060]
s.t.||z
k-zu||2≤h2tan2θ
ꢀꢀꢀꢀꢀꢀꢀ
(15)
[0061]hmin
≤h≤h
max
ꢀꢀꢀꢀꢀꢀꢀꢀ
(16)
[0062]
第二问题p2中,由于目标函数和约束条件(15)的非凸性,属于非凸优化问题;由于无人机与地面的通信主要由视距链路控制,无人机与第k个物联网设备之间的视距链路路径损耗模型可表示为:
[0063][0064]
其中,fc和c分别表示光的载频和速度。表示无人机与第k个物联网设备之间的los链路的路径损耗;η
los
为los传输的平均附加损失(请结合符号上下标的含义说明符号的含义);因此,第k个物联网设备的接收功率可以表示为:
[0065][0066]
从公式(18)开始,第k个物联网设备的接收功率取决于路径损耗指数;为使受无人机高度和无线覆盖面积影响的总路径损失最小,可以修改第二问题p2为第三问题p3,具体如下:
[0067][0068]
s.t.||z
k-zu||2≤h2tan2θ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(20)
[0069]hmin
≤h≤h
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0070]
min{xi}≤xu≤max{xi},1≤i≤k
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(22)
[0071]
min{yi}≤yu≤max{yi},1≤i≤k
ꢀꢀꢀꢀꢀ
(23)
[0072]
第三问题p3的目标函数随着无人机与第k个物联网设备之间的距离dk的增加而单调增加,而无人机与第k个物联网设备之间的距离dk由无人机部署决定;
[0073]
因此,可以通过最小化无人机与地面传输的总路径损失来计算无人机的最佳三维布局;另外,可以表示为因此,利用不等式第三问题p3可以等价地表示为所有物联网设备与对应的无人机之间的距离之和最小化问题p3.1,具体如下:
[0074][0075]
s.t.||z
k-zu||2≤h2tan2θ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(25)
[0076]hmin
≤h≤h
max
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0077]
min{xi}≤xu≤max{xi},1≤i≤k
ꢀꢀꢀꢀꢀꢀ
(27)
[0078]
min{yi}≤yu≤max{yi},1≤i≤k
ꢀꢀꢀꢀꢀꢀ
(28)
[0079]
可以看出,随着无人机的飞行高度h的增大,无人机与第k个物联网设备之间的距离dk也增大;因此,在无人机与物联网设备的最小阈值h
min
的范围内,最优飞行高度h应尽可能小,具体如下:
[0080][0081]
其中,d
max
=maxk=
1,...,k
||z
k-zu||2表示无人机与物联网设备之间的最大水平距离;h
*
为无人机能够对同一组内所有物联网设备提供无线覆盖的最小飞行高度,同时保证了总路径损失和高度约束的最小化;根据式(29),表明满足约束(25)和约束(26)中的h
*
可以去除,因此可以将总距离最小化问题p3.1重新表述为第二最小化问题p3.2,具体如下:
[0082][0083]
s.t.min{xi}≤xu≤max{xi},1≤i≤k
ꢀꢀꢀꢀꢀꢀꢀ
(31)
[0084]
min{yi}≤yu≤max{yi},1≤i≤k
ꢀꢀꢀꢀꢀꢀ
(32)
[0085]
第二最小化问题p3.2是一个凸优化问题;因此,利用xu和yu的一阶导数可以有效地解决该问题,其中xu和yu为:
[0086][0087]
在得到无人机的三维布局后,利用分支定界算法设计无人机的飞行轨迹,使无人机的总飞行距离最小化,节约无人机的能耗。
[0088]
进一步地,步骤s4.2中,给定无人机的固定三维位置和发射功率pk,系统和速率最大化问题p1可表示为第四问题p4,具体如下:
[0089][0090]
由公式(3)可知,无人机与第k个物联网设备之间的有效信道增益随着波
束形成增益|e(θ,φ)|2的增加而增加;由于无人机与第k个物联网设备之间的有效信道增益的增加,显著提高了无人机与地面通信的质量,从而提高了基于无人机辅助noma网络的可达速率;为了形成可操纵的波束图,其关键思想是优化旁瓣电平、阵列增益和波束宽度;这样,第四问题p4可以转化为波束图合成问题p4.1,具体如下:
[0091][0092]ek
(θ,φ)表示天线阵列转向到第k个物联网设备的波束方向图;(θ,φ)表示天线阵列转向到第k个物联网设备的波束方向图;为了解决波束图合成问题p4.1,可以通过调整天线的旁瓣电平、阵列增益和波束宽度来优化m
×
n天线阵β的相位,因此可表示为一个多目标优化问题;该多目标优化问题可采用基于moea/d的算法进行解决,可以收敛到pareto最优前沿,得到最优波束方向图。
[0093]
进一步地,步骤s4.3中,对于无人机固定的三维布置和无人机的天线阵列转向到第k个物联网设备的波束方向图ek(θ,φ),系统和速率最大化问题p1表示为第五问题p5,具体如下:
[0094][0095]
s.t.rk>rkꢀꢀ
(37)
[0096][0097]
由于目标函数和约束(37)的非凸性,第五问题p5是非凸的;根据步骤s2中的noma系统的收发策略,物联网设备的解码顺序取决于物联网设备的信道质量;采用基于moea/d的自适应波束形成算法,可以得到了一组pareto最优解,从而确定有效的信道功率增益;为了便于后面的分析,假设了便于后面的分析,假设通过选择合适的帕累托最优解;根据(6)和式(7),第五问题p5可以改写为累加率最大化问题p5.1,具体如下:
[0098][0099]
s.t.rk≥rkꢀꢀ
(40)
[0100][0101]
然而,累加率最大化问题p5.1仍然是非凸优化问题;一般情况下,约束(40)由于分数项是非凸的,因此约束(40)是解决累加率最大化问题p5.1的一个障碍;为了解决这个问题,将约束(40)重写为:
[0102][0103]
不等式(42)是一个关于pk的线性函数,因此是凸函数;因此,将(42)代入累加率最大化问题p5.1,表示为第二累加率最大化问题p5.2,具体如下:
[0104][0105][0106][0107]
从(43)开始,和均为正函数,目标函数为若干非递减函数;因此,为了便于求解,利用引理将目标函数转化为凸函数;令ck(pk)=ak(pk)/bk(pk);ck可以采用替代,因此第二累加率最大化问题p5.2等价表示为第三累加率最大化问题p5.3,具体如下:
[0108][0109][0110][0111]
其中,
[0112][0113][0114]
第三累加率最大化问题p5.3是一个具有固定yk的凸问题。
[0115]
进一步地,步骤s4.3中,提出了一种基于fp的次优算法来解决第三累加率最大化问题p5.3,具体如下:
[0116]
c1初始化:
[0117]
c1.1初始化pk到可行点;
[0118]
c1.2采用替代问题(p5.2)的ak(pk)/bk(pk);
[0119]
c2重复以下过程,直到公式(50)收敛:
[0120]
c2.1通过公式(49)更新yk;
[0121]
c2.2固定yk,yk解决优化第三累加率最大化问题p5.3来更新pk:
[0122]
其中,在每一步中,首先用公式(50)更新yk;然后,在保持yk不变的情况下,gk比pk最大;由于gk不随每次迭代而减小,基于fp的次优算法可以收敛到一个平稳点,其收敛性能分析如下:
[0123]
基于fp的次优化算法对yk和pk进行迭代优化,收敛于给定的最优yk的一个驻点上:
[0124][0125]
第三累加率最大化问题p5.3是一个yk固定的凸优化问题,用公式(50)来更新yk的值,因此基于fp的次优化算法每次迭代都能得到一个不动点;由于采用的迭代算法为块坐标上升算法,因此可以根据公式(51)得到最优yk收敛到一个站位点;另一方面,优化问题的转化,第二累加率最大化问题p5.2与第三累加率最大化问题p5.3是等价的,因为两个问题的解和目标函数是等价的;由于第二累加率最大化问题p5.2的解与第三累加率最大化问题p5.3的解是相同的,基于fp的次优算法应用于第二累加率最大化问题p5.2时也可以收敛到一个平稳点;但由于第二累加率最大化问题p5.2的非凸性,所提方法只能收敛于局部最优。
[0126]
相比于现有技术,本发明的优点在于:
[0127]
与传统的用户接入机制相比,本发明结合了毫米波mimo-noma系统和uav通信技术,不仅可以显著增加物联网节点的连接密度,而且可以提升频谱效率。具体地,在考虑最小传输速率、无人机覆盖半径以及发送功率等约束下,本发明以最大化系统吞吐量为目标构建联合非凸优化问题。为了解决这个问题,我们首先将非凸问题转化为路径损耗最小化问题,进一步利用凸优化方法获得最优的无人机位置部署。接着,我们提出基于moea/d的波束赋形算法寻找最优的波束权值。最后,为了降低计算复杂度,我们还提出一种基于分式规划以优化发射功率。数值结果表明,与正交频分复用(orthogonal frequency division multiple access,ofdma)方案相比,以上两种算法可以显著提升物联网节点的吞吐量。
附图说明
[0128]
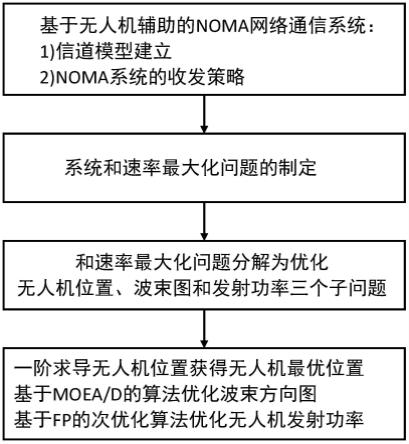
图1为本发明实施例一种基于无人机辅助noma网络的路径规划和功率分配联合优化方法流程图;
[0129]
图2为本发明实施例基于多波束和功率分配的无人机辅助noma网络通信系统示意图;
[0130]
图3为本发明实施例基于fp的次优算法的收敛速率与迭代次数关系示意图;
[0131]
图4为本发明实施例在不同资源分配方法下的波束形成增益与速率性能的关系示意图。
具体实施方式
[0132]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合附图并举实施例,对本发明的具体实施进行详细说明。
[0133]
实施例1:
[0134]
一种无人机辅助noma网络的路径规划和功率分配方法,如图1所示,包括以下步
骤:
[0135]
s1、构建基于多波束和功率分配的无人机辅助noma网络通信系统;
[0136]
s2、在基于多波束和功率分配的无人机辅助noma网络通信系统的基础上,建立信道模型,进而制定noma系统的收发策略;
[0137]
s3、制定系统和速率最大化问题,将无人机的三维布局、波束方向和发射功率三者结合起来进行优化系统和速率最大化;
[0138]
s4、对系统和速率最大化问题进行分解,分别优化无人机位置、波束图和无人机发射功率。
[0139]
本实施例中,仿真效果图如图2所示;本实验场景假设k=12个物联网设备随机分布在500
×
500m2的面积内,所有物联网设备划分为γ=4组。系统模型的参数设置为σ2=-110dbm,η
los
=0.1dbm,p
max
=80mw,rk=1bit/s/hz,α=2,和载波频率为25ghz。另外,设置h
min
=21m,h
max
=120m,2θ=80
°
,i
mn
=1a,d
array
=1a,以及一个8
×
8天线阵列;
[0140]
图2研究了基于fp次优算法的收敛行为。从图2可以看出,该算法能够收敛到一个稳定值。结果表明,功率的起始点p
(0)
会影响算法的收敛速度,当p
(0)
=0、0.5pmax、0.25pmax、0.75pmax,经过大约两次迭代,总速率可以收敛到14.6bit/s/hz,而当p
(0)
=pmax时,迭代次数减少到1次。
[0141]
实施例2:
[0142]
本实施例中,一种基于无人机辅助noma网络的路径规划和功率分配联合优化方法的仿真效果图如图3所示。
[0143]
图3的其他参数为:天线阵列分别设置为1
×
1和8
×
8;用户数量分别k=2以及k=4;
[0144]
图3研究了不同功率预算下波束形成增益对总和率的影响,实验中将位置和功率分配算法应用于无人机支持的noma系统中,其中无人机和用户都配备单一天线。结果表明,随着最大发射功率增大的增加,对系统和速率的提高有很大的影响。本实验提出的方案时基于优于最优位置的1*1方案。与无人机安装单天线的最优位置1*1方案相比,本方案允许无人机利用天线阵列产生多波束,为多个用户服务,因此,阵列天线获得的高波束形成增益可以补偿毫米波通信的高传播损耗,并提供更高的自由度,从而提高了系统的和率。
[0145]
实施例3:
[0146]
本实施例中,一种基于无人机辅助noma网络的路径规划和功率分配联合优化方法的仿真效果图如图4所示。
[0147]
图4的其他参数为:无线资源接入方式分别为ofdma和noma;
[0148]
图4研究了基于fp的次优算法和ofdma算法对系统和速率的影响。实验结果表明,所有方案得到的和速率随着最大发射功率时单调递增,但增益随着最大发射功率的增大而减小。可以看出,基于fp的次优算法的noma方案的性能优于ofdma方案,这是因为ofdma方案需要将每个频率资源分配给一个用户。为了满足用户的qos,无人机需要利用较大的发射功率来满足用户的最小速率要求,从而可以分配较少的发射功率来提高总和速率。本发明提出的算法采用noma,使多个用户可以利用相同的带宽资源,充分利用用户多样性,从而达到更高的频谱效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1