一种无人机相机曝光度调节方法及存储介质与流程
1.本发明涉及无人机拍照技术领域,具体涉及一种无人机相机曝光度调节方法及存储介质。
背景技术:
2.无人机自动驾驶技术已经日趋成熟,正在被越来越多行业使用,一般情况下,自动驾驶的无人机将按照航线飞行,航线中包含了飞机作业的详细数据,每一个拍照点的空间坐标,航向角,镜头俯仰角等信息。飞控系统根据航线提供的参数,控制飞机沿航线飞行,并在拍照点进行拍照操作。无人机自动驾驶巡检主要是飞到拍摄目标面前,与拍摄目标基本水平,镜头水平朝前,近距离拍照,以达到看清目标细节的目的。
3.无人机的飞行环境一般都是广阔的天空,在自然环境下,相机的成像效果很容易受到外部环境的影响,如太阳光照射,天气阴沉等情况,造成照片曝光过度或色彩暗沉,无法看清拍摄目标,对后续的照片使用造成了很大的麻烦。由于无人机拍照角度大部分是水平及向下,所以可以选择在风和日丽的正午,太阳无法直射相机的时候作业,但是,这就大大缩短了无人机的可作业时间,严重降低作业效率,增加作业成本。或者可以通过遥控器上的波轮手动控制相机曝光度,但是自动驾驶时,飞机的飞行和拍摄动作都是全自动完成,人工很难在拍照前调整好合适的曝光度,往往是还没有调好,飞机就拍照飞走了,或者这个方向调整合适了,飞机转个角度曝光度又不行了。所以,相机曝光度成为了影响无人机自动驾驶拍照效果的棘手问题之一。
技术实现要素:
4.针对上述问题,发明人提供了一种无人机相机曝光度调节方法,以实现自动驾驶无人机的相机曝光度自动调节,从而保证拍摄的照片亮度适宜,提高照片清晰度。
5.根据第一方面,本发明提供了一种无人机相机曝光度调节方法,包括如下步骤:
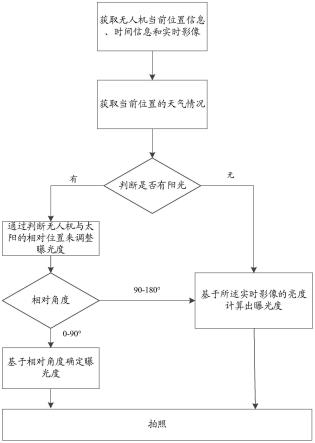
6.步骤s1:获取无人机当前位置信息、时间信息和实时影像;所述当前位置信息包括:经纬度信息和海拔数据;所述时间信息包括日期和时间;
7.步骤s2:基于所述当前位置信息及时间信息获取当前位置的天气情况;
8.步骤s3:判断当前位置的天气情况,若有阳光,则通过判断无人机与太阳的相对位置来调整曝光度;若无阳光,则基于所述实时影像的亮度计算出曝光度,并基于该曝光度进行拍照。
9.进一步地,所述步骤s3中,所述通过判断无人机与太阳的相对位置来调整曝光度的步骤包括:
10.基于当前位置信息及时间信息计算出当前位置的太阳高度角和太阳方位角;
11.获取无人机当前的航向角和镜头俯仰角;
12.将太阳方位角与航向角、太阳高度角与镜头俯仰角进行比对,得到太阳与无人机镜头的相对角度;所述相对角度为0-180度;
13.若所述相对角度在0-90度之间,则基于相对角度确定曝光度;若所述相对角度在90-180度之间,则基于所述实时影像的亮度确定曝光度;
14.进一步地,所述相对角度为:
15.相对角度=相对镜头的方位角
×
50%+相对镜头的高度角
×
50%
16.相对镜头的方位角=|太阳方位角-飞机航向角|
17.相对镜头的高度角=|太阳高度角-镜头俯仰角|。
18.进一步地,相对角度在0-90度之间时,所述曝光度为:
19.曝光度=相机最小曝光度+(方位角/角度范围)
×
曝光度范围。
20.进一步地,所述步骤s3中,无阳光状态或相对角度在90-180度之间时,曝光度为:
21.曝光度=相机最大曝光度-(图像亮度/亮度范围)
×
曝光度范围。
22.根据第二方面,本发明还提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序能够被处理器执行以实现如上所述的方法的步骤。
23.相比现有技术,本发明的有益效果:
24.(1)本发明提供的无人机相机曝光度调节方法,利用高精度的微气象数据,结合天文学太阳空间位置算法,智能判断和分析无人机作业区域的光照情况,自动对无人机相机的曝光度进行调整,保证拍摄的照片亮度适宜,解决了不干预的情况下,无人机拍摄照片因为光线不好或曝光过高导致的目标不清晰的问题,也拓宽了无人机的可作业时间,提高作业效率。
25.(2)整个过程全自动执行,不必作业人员全神贯注盯着屏幕以便及时调整曝光度,减轻作业人员负担,降低作业人员技术门槛,间接降低作业成本,有利于无人机自动巡检技术的推广与应用,让无人机自动驾驶巡检真正发挥高效、高质量的优势。
附图说明
26.图1为实施例1中无人机相机曝光度调节方法的流程图;
27.图2为无人机与太阳相对位置示意图。
具体实施方式
28.下面通过具体实施方式结合附图对本发明作进一步详细说明。
29.实施例1
30.如图1所示,本发明提供了本发明提供了一种无人机相机曝光度调节方法,包括如下步骤:
31.步骤s1:获取无人机当前位置信息、时间信息和实时影像;当前位置信息包括:经纬度信息和海拔数据;所述时间信息包括日期和时间。
32.步骤s2:基于当前位置信息及时间信息从气象数据服务器获取当前位置的天气情况。
33.步骤s3:判断当前位置的天气情况,若有阳光,则通过判断无人机与太阳的相对位置来调整曝光度;若无阳光,则基于所述实时影像的亮度计算出曝光度,并基于该曝光度进行拍照。
34.具体地,若有阳光,则基于当前位置信息及时间信息计算出当前位置的太阳高度
角和太阳方位角。太阳高度角hs的计算公式为:
[0035][0036]
太阳方位角as计算公式为:
[0037][0038]
其中,为地理纬度;δ为太阳赤纬;ω为太阳时角。
[0039]
δ=[0.006918-0.399912cos(b)+0.070257sin(b)-0.006758cos(2b)+0.000907sin(2b)-0.002697cos(3b)+0.001 48sin(3b)](180/pi)
[0040]
pi=3.1415926;b=360n/365;n为日数,自每年1月1日开始计算;
[0041]
ω=(真太阳时-12)
×
15
°
[0042]
真太阳时=时钟时+真太阳时时差-标准时时差
[0043]
时钟时是当前位置的时间,真太阳时时差可通过查寻真太阳时时差表获得,标准时时差=(当地标准时的地理经度-当前位置地理经度)
×
4(单位为分钟)。
[0044]
然后获取无人机当前的航向角和镜头俯仰角;将太阳方位角与航向角、太阳高度角与镜头俯仰角进行比对,得到太阳与无人机镜头的相对角度。
[0045]
相对角度=相对镜头的方位角
×
50%+相对镜头的高度角
×
50%
[0046]
相对镜头的方位角=|太阳方位角-飞机航向角|
[0047]
相对镜头的高度角=|太阳高度角-镜头俯仰角|
[0048]
相对角度设定为0-180度,180-360度之间的相对角度则用360度减去该角度后换算得到0-180度范围内的相对角度。
[0049]
若相对角度在0-90度之间,此时无人机镜头被太阳直射会产生光晕,无法通过图像亮度分析曝光度,故利用相对角度来确定曝光度;即:
[0050]
曝光度=相机最小曝光度+(方位角/角度范围)
×
曝光度范围
[0051]
然后相机以该曝光度进行拍照。
[0052]
若所述相对角度在90-180度之间,此时无人机镜头不会受到太阳照射,可看作无无阳光状态来分析曝光度,采用与无阳光时相同的方法来计算曝光度,即通过图像亮度来分析曝光度:
[0053]
曝光度=相机最大曝光度-(图像亮度/亮度范围)
×
曝光度范围
[0054]
其中,亮度=r
×
0.299+g
×
0.587+b
×
0.114,
[0055]
r为图像中每个像素中红色的颜色值;g为图像中每个像素中绿色的颜色值;r为图像中每个像素中蓝色的颜色值。
[0056]
以上应用了具体个例对本发明进行阐述,只是用于帮助理解本发明,并不用以限制本发明。对于本发明所属技术领域的技术人员,依据本发明的思想,还可以做出若干简单推演、变形或替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1