一种城市环境中多无人机中继优化部署方法
1.本发明涉及无人机无线通信技术领域,更具体地,涉及一种城市环境中多无人机中继(无人机一般也叫无人机中继)优化部署方法。
背景技术:
2.无人机系统中,保持机器人与基站间的无线通信质量非常重要。然而在灾后搜救场景或监控场景中,回程网络通常要么因灾害而中断不可用,要么传输容量有限,同时城市中障碍物很可能导致通信发生严重延迟、通信质量受损或者通信范围受限。由于无人机具有快速的移动性和灵活的部署能力以及更易于与地面机器人构建直视通信,利用无人机作为中继,为面向任务的地面机器人与远处的基站之间建立链接、实现多跳无线回程网络是一个种保障通信质量的方式。
3.多无人机中继系统中,由地面移动机器人在地面执行任务,比如采集数据,并将任务数据发送给空中无人机中继。然后空中无人机中继对数据进行转发,发送回远处的基站。但由于环境中障碍物会导致通信质量受损,从而导致任务表现不佳,因此如何部署无人机为最大数量的地面移动机器人服务,并在满足通信质量约束的情况下将时间延迟降到最低是多机器人系统中多无人机中继通信领域面临的一个挑战。
4.目前,已有部分研究提出关于多无人机中继系统优化部署的方法。u.challita和c.bettstetter等人在2018年发表在ieee international conference on communications的论文“deep reinforcement learning for interference-aware path planning of cellular-connected uavs(用于蜂窝连接无人机干扰感知路径规划的深度强化学习方法)”采用锐利衰减信道模型,提出一种深度强化学习方法解决能源效率最大化、通信干扰和无线延迟最小化的综合优化问题,但是该方法没有对有障碍物的环境进行研究,因此只能适用于一种理想的无障碍物环境的综合优化。u.challita和w.saad在2017年发表在ieee global communications conference的论文“network formation in the sky:unmanned aerial vehicles for multi-hop wireless backhauling(空中网络形成:多跳无线无人机回程网络)”考虑了环境中存在障碍物的情况,并采用概率直视通信信道,基于网络形成博弈框架提出了短视网络的形成算法以综合优化数据速率和数据传输延迟,简称背景技术一。但是该方法假设环境中障碍物均匀分布,不能直接适用于障碍物散乱分布的现实环境中。
5.综上所述,现有的多无人机中继系统优化部署方法主要是考虑环境中不存在障碍物的情况,或者假设环境中障碍物均匀分布的情况,在实际情况下都有性能缺陷。还没有公开文献涉及在障碍物散乱分布的现实环境中优化网络传输数据量及时延的多无人机中继系统的优化部署方法。
技术实现要素:
6.本发明要解决的技术问题是提供一种城市环境中多无人机中继优化部署方法,解
决存在障碍物的环境中多无人机中继系统优化部署的问题,通过规划无人机中继的最优部署位置、无人机中继之间的连接关系、无人机中继与地面移动机器人的匹配关系,满足最低通信质量需求,在最大化服务地面移动机器人数量的同时尽量减小传输时延。
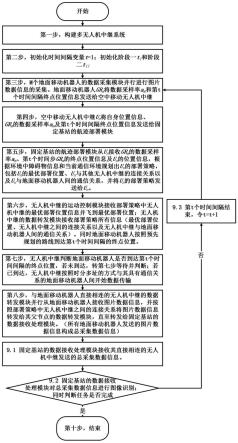
7.为解决上述技术问题,本发明的技术方案是:构建由m个地面移动机器人、n个空中移动无人机中继u和固定基站bso组成的多无人机中继系统。将任务执行时间量化为多个时间间隔,时间间隔包括时长固定的阶段一和时长不固定的阶段二。在一个时间间隔内,阶段一时,地面移动机器人按照预先规划好的路线从起点到达终点,固定基站根据无人机转发来的位置信息,以及地面移动机器人发送的当前时间间隔终点位置、总数据信息、环境中障碍物信息和当前通信环境规划出空中移动无人机中继部署(包括u的最优部署位置、u之间的连接关系、u与地面移动机器人的匹配关系),并发送给空中移动无人机中继。阶段二的时长取决于数据传输的时间。阶段二时当所有空中移动无人机中继及地面移动机器人都到达规划的部署位置或当前时间间隔的终点位置后,空中移动无人机中继及所有地面移动机器人按规划的匹配关系进行数据传输;u接收的数据同步转发给bso,bso接收数据并处理数据,并判断任务是否完成(若采集到关注目标的信息,表示任务完成,关注目标可以是重点公共设施、监测的建筑物等)。至此,当前时间间隔结束,下一个时间间隔开始,直至任务完成。
8.本发明包括以下步骤:
9.第一步,构建多无人机中继系统,多无人机中继系统由n个空中移动无人机中继(用u1,
…
,un,
…
,un表示,1≤n≤n)、m个地面移动机器人(用gr1,
…
,grm,
…
,grm表示,1≤m≤m)和一个固定基站(用bso表示)组成,m和n均为正整数。地面移动机器人是同构或异构机器人,如无人车、人形机器人等。空中移动无人机中继是具有数据转发功能的旋翼无人机。固定基站是具有良好计算能力的资源可控的计算设备,可以运行计算密集型或者知识密集型的机器人应用,主要用于部署空中移动无人机中继并处理接收的数据信息。地面移动机器人与空中移动无人机中继之间通过存在障碍物的空对地通信链路进行通信,空中移动无人机中继之间、空中移动无人机中继和固定基站之间通过无障碍物的空对空通信链路进行通信,一个空中移动无人机中继可以与多个地面移动机器人通信,但一个地面移动机器人只能与一个空中移动无人机中继通信。
10.m个地面移动机器人上安装的软件相同,第m个地面移动机器人grm除了装有操作系统(如ubuntu16.04)、机器人操作系统(ros,版本要求ros kinetic或以上版本)、定位装置外,还装有数据采集模块(如kinect传感器、摄像头这样的数据采集设备)。将时间离散为多个时间间隔,每个时间间隔分为时长固定的阶段一和时长不固定的阶段二。阶段一时,地面移动机器人grm根据用户预先规划的任务路线前进。数据采集模块进行数据采集,将采集到的数据信息存储起来,在阶段一起点位置处将预先规划好的阶段一的终点位置信息和数据采样率am(即每秒采集的数据量,单位:比特/秒)(kinect传感器或摄像头自带)发送给与其通信的空中移动无人机中继。阶段二时,数据采集模块在地面移动机器人grm阶段一所处的终点位置处向与其通信的空中移动无人机中继发送当前时间段的图片数据信息(如kinect传感器获取的图片数据信息(一般为关注目标的彩色照片、深度照片或者视频信息,关注目标可以是重点公共设施、监测的建筑物等),或摄像头获取的图片数据信息(关注目标的彩色照片、视频信息,与kinect传感器的不同处在于没有深度照片))。
11.n个空中移动无人机中继上安装的软件相同,第n个无人机中继un除了装有操作系
统(如ubuntu16.04)、机器人操作系统(ros)(其上安装的操作系统和机器人操作系统与地面移动机器人上的相同)、定位装置外,还装有数据转发模块和运动控制模块。un的数据转发模块接收与un通信的地面移动机器人(令为grm)发送的数据采样率am、第t个时间间隔终点grm位置信息,并通过定位装置获取un位置信息,将am、t和un位置信息转发给与un通信的前一个空中移动无人机中继u
n-1
,按此规律依次转发,直至转发给固定基站。un的数据转发模块接收固定基站传来的un与其它空中移动无人机中继的通信关系、un与地面移动机器人间的通信关系,并转发给与un通信的其它空中移动无人机中继节点;un的数据转发模块还接收并转发与其通信的所有地面移动机器人发送的总图片数据信息(总图片数据信息指与单独一个空中移动无人机中继un进行通信的所有地面移动机器人发送的图片数据信息(单位:比特)的总和)给固定基站。同时,un的运动控制模块通过定位装置获取当前位置,并根据从固定基站传来的最优部署位置,飞行到最优部署位置。
12.固定基站上除了装有操作系统(如ubuntu16.04,与地面移动机器人上的相同)外,还装有数据接收处理模块以及航迹部署模块。数据接收处理模块并行接收并处理与固定基站通信的无人机中继发送来的总采集数据信息(同一时间虽只有部分无人机与基站直接相连,但是所有无人机的数据都会通过网络传给基站。总采集数据信息指与固定基站通信的所有无人机中继发送给固定基站的总图片数据信息的总和,单位:比特。),根据总采集数据信息判断发送该信息的空中移动无人机中继(令为un)的任务是否完成并决定是否继续进行下一时间间隔的对关注目标的信息采集。航迹部署模块接收un转发的地面移动机器人在第t个时间间隔终点位置信息、数据采样率am、un位置信息,根据环境中障碍物信息以及当前通信环境信息规划出满足通信质量条件且能在较少时延内传输更多地面移动机器人采集的数据的un的部署策略(包括un的最优部署位置、un与其它空中移动无人机中继的通信关系、un与地面移动机器人的通信关系),将un的部署策略发送给un。
13.第二步,初始化时间间隔序号t=1;初始化阶段一ti和阶段二t
ii
,ti和t
ii
以秒为单位。ti时长固定,一般设置为30秒。t
ii
时长不固定,一般设置为地面移动机器人通过无人机中继传到固定基站的数据传输时长。
14.第三步,m个地面移动机器人的数据采集模块并行进行图片数据信息的采集,m个地面移动机器人进行数据采集的方法相同,但是m个地面移动机器人的数据采集能力不同,用am表示地面第m个移动机器人grm的数据采样率,即每秒采集的数据量(单位为比特/秒),am即为数据采集模块(即kinect传感器或摄像头)的采样速率。在第t个时间间隔开始时,grm的数据采集模块将数据采样率am和第t个时间间隔终点grm位置信息发送给与其通信的空中移动无人机中继(令为un)。(因为地面移动机器人的路线是固定的规划好的,所以第t个时间间隔开始时能得到第t个时间间隔终点grm位置信息)。
15.第四步,un的数据转发模块将grm的数据采样率am和第t个时间间隔终点grm位置信息发送给固定基站的航迹部署模块。同时,un通过定位装置获取un的位置信息,并将un的位置信息转发给固定基站的航迹部署模块。
16.第五步,固定基站的航迹部署模块从un接收grm的数据采样率am、第t个时间间隔grm终点位置信息以及un的位置信息,根据环境中障碍物信息和当前通信环境信息规划出un的部署策略(即最终网络g的信息),即un的最优部署位置、un与其他无人机中继的连接关系以及un与地面移动机器人间的通信关系,并将un的部署策略发送给un。方法是:
17.5.1航迹部署模块从un接收grm的数据采样率am、第t个时间间隔grm终点位置信息以及空中移动无人机中继un的位置信息,构建以在较短时延内传输更多地面移动机器人采集的数据的网络为目标的多空中移动无人机中继部署(包括u的最优部署位置、u之间的连接关系、u与地面移动机器人的匹配关系)的数学模型,该数学模型由公式
⑴
表示:
[0018][0019]
其中,x
un
表示空中移动无人机中继un的位置。j表示优化目标,含义为带权重的(ω)时延与传输数据量的差值(要“构建以在较短时延内传输更多地面移动机器人采集的数据的网络为目标的多空中移动无人机中继部署”,本质上目标是两个,一个是更小时延,一个是更大数据量。所以为多目标优化问题。可以转化为这样一个带权重的差值,就能得到相对更小时延和更大数据量。这是一个惯常的处理多目标优化问题的方法),j越小说明网络g效果越好。采用时分多址(time division multiple access,tdma)来避免不同通信信道之间的相互干扰,即每个通信链路都被分配一个专属的数据传输时隙。定义t
nn'
表示空中移动无人机中继un与u
n’通信时的传输时隙,t
nm
表示空中移动无人机中继un与地面移动机器人grm通信时的传输时隙,t
on
表示基站bso与空中移动无人机中继un与通信时的传输间隙。ω表示一个权衡参数,可以权衡更小的数据传输延迟和传输更多数据之间的重要性,一般根据经验设置为0到0.2之间的数字,数字越小表示传输更多数据越重要。表示m个地面移动机器人采集的数据经过多无人机中继系统之间的通信网络g(即u1,
…
,un,
…
,un之间的通信关系、u1,
…
,un,
…
,un与gr1,
…
,grm,
…
,grm的通信关系;u1,
…
,un,
…
,un的最优部署位置)传输到固定基站bso所需的时间(即时延)。为了表示通信网络g中的时延,定义从与地面移动机器人grm直接相连的无人机中继u
l
到固定基站bso的路径为pa
l
=u
l1ul2
...u
lkulk+1
...u
lk
,1≤l≤m,1≤k《k,k≤n,k是pa
l
中经过无人机的总数,k和k都是正整数,u
l1
=u
l
,u
lk
=bso,u
l2
是与u
l1
通信的空中移动无人机中继,u
lk+1
是与u
lk
通信的空中移动无人机中继(路径pa
l
的开头是与地面移动机器人grm直接相连的无人机中继u
l
,路径pa
l
的结尾是固定基站bso),且路径pa
l
上的相邻无人机中继间都存在通信链路。则t
delay_m
由公式
⑵
计算:
[0020]
[0021]
其中,t
m,l1
表示地面移动机器人grm与路径pa
l
上无人机中继u
l1
间数据的传输时间,t
lk,lk+1
表示路径pa
l
上无人机中继u
lk
与无人机中继u
lk+1
间数据的传输时间,t
lk-1,o
表示路径pa
l
上无人机中继u
lk-1
与基站bso间数据的传输时间。这三个参数统一表示为信息发送方i与信息接收方j(i可以代表地面移动机器人、无人机中继中任意一个,j可以代表无人机中继、固定基站中任意一个)间的数据传输时长,由式
⑶
计算:
[0022]
t
ij
=am/(bsu)
ꢀꢀ⑶
[0023]
其中,am表示在时长为ti时地面移动机器人grm采集的数据量(amti),su表示任意一台空中移动无人机中继传输数据的频谱效率(单位为bit/s/hz),b表示所有空对空及空对地通信链路信道带宽(因为采用时分多址的方式,所以所有通信信道的带宽相同)。
[0024]
表示m台地面移动机器人采集的总数据量。t
nm
为无人机中继un和地面移动机器人grm间的数据传输时长。φ(t
nm
)为映射函数,当t
nm
》0时,φ(t
nm
)=1;反之,φ(t
nm
)=0。φ(t
nm
)实际含义是将时隙分配映射为通信网络拓扑结构,φ(t
nm
)=1表示如果t
nm
被分配给无人机中继un和地面移动机器人grm(t
nm
》0),则un和grm之间存在通信链路;φ(t
nm
)=0表示如果t
nm
被分配给无人机中继un和地面移动机器人grm,un和grm之间不存在通信链路。
[0025]
式
⑴
中snr
min
表示信道满足通信质量所需的最小信噪比阈值。snr
nn'
表示无人机un与u
n’之间信道的接收信噪比,snr
nm
表示无人机un与地面移动机器人grm之间信道的接收信噪比,snr
no
表示无人机un与基站bso之间信道的接收信噪比。snr
nn'
,snr
nm
,snr
no
这三个参数统一表示为信息发送方i与信息接收方j之间信道的接收信噪比,由式
⑷
计算:
[0026][0027]
其中,φ(t
ij
)表示i与j之间是否存在通信链路,pi表示信息发送方i的发射功率,n0表示加性高斯白噪声的功率谱密度,β表示路径损耗指数,d
ij
表示信息发送方i与信息接收方j之间的欧氏距离,ψ
ij
表示信息发送方i与信息接收方j之间的考虑衍射和多径的阴影衰落参数,ψ
ij
服从高斯随机分布,根据式
⑸
计算:
[0028][0029]
其中,ψ
ij,los
表示直视通信时的ψ
ij
,当通信信道不经过障碍物时,为直视通信(line of sight,los)时,ψ
ij,los
的高斯分布参数均值为μ
ij,los
,方差为ψ
ij,nlos
表示非直视通信时的ψ
ij
,当通信信道经过障碍物时,为非直视通信(none line of sight,nlos)时,ψ
ij,los
的高斯分布参数均值为μ
ij,nlos
,方差为上述参数(μ
ij,los
、μ
ij,nlos
和)由信息发送方i与信息接收方j之间的通信夹角(即i与j形成的连线与水平线之间的夹角)共同决定,μ
ij,los
、μ
ij,nlos
和具体数值与计算方法可以参考p.ladosz和h.oh等人2019年发表在ieee robotics and automation letters第四期的论文“a hybrid approach of learning and model-based channel prediction for communication relay uavs in dynamic urban environments(动态城市环境下一种基于
学习和模型的中继无人机通信信道的混合预测方法)”第三页的公式(4)、公式(5)和第七页的表格四,该文中第三页的表格一对应μ
ij,los
和μ
ij,nlos
的数值,将第七页的表格四中数值代入第三页的公式(4)、公式(5)可求得和的值。
[0030]
式
⑴
中dis(un,un′
)表示un与u
n’之间的欧氏距离,d
safe
表示不同无人机之间的最小安全距离,若距离小于安全距离则可能相撞。
[0031]
式
⑴
中φ(t
no
)表示un与基站之间是否存在通信链路,若存在通信链路,φ(t
no
)=1,若不存在通信链路,φ(t
no
)=0;表示至少有一个无人机un与基站bso相连;φ(t
nm
)表示un与grm之间是否存在通信链路,若存在通信链路,φ(t
nm
)=1,若不存在通信链路,φ(t
nm
)=0;表示grm至多与一个无人机相连;φ(t
nn
′
)表示un与u
n’之间是否存在通信连接,若存在通信连接,φ(t
nn
′
)=1,若不存在通信连接,φ(t
nn
′
)=0;表示无人机与基站之间及无人机之间形成的边(信息发送方i与信息接收方j之间有边则表示信息发送方i与信息接收方j之间存在通信连接)的数量等于空中移动无人机中继的数量n。这几个约束保证了通信网络g的树状网络拓扑结构。树状的网络拓扑结构含义为一个以固定基站为根的双向树状结构的网络,它允许每个空中移动无人机中继或地面移动机器人最多通过一条路径连接到固定基站。
[0032]
式
⑴
中表示时隙约束,即分配给每个链路的时隙都要有足够长的时间让un传输完相关数据。un不仅要传输来自与其通信的grm的数据,还要传输来自与其通信的其它空中移动无人机中继的数据,an表示un需要转发的数据量,am是地面移动机器人grm采集的数据量。
[0033]
5.2初始化运行次数y为零。
[0034]
5.3令运行次数y=y+1。根据赋予的权重(权重可以是认为重要的参数,如剩余电量、与固定基站间的距离等)从n个空中移动无人机中继选择一台无人机,令为un,随机且均匀的激活另一空中移动无人机中继u
n’,将所有未与当前网络g连接(即通信)的地面移动机器人放到未连接移动机器人集合ungrs中。对ungrs根据位置进行聚类(将物理或抽象对象的集合分成由类似的对象组成的多个类的过程被称为聚类。由聚类所生成的簇是一组数据对象的集合,这些对象与同一个簇中的对象彼此相似,与其他簇中的对象相异),得到多个簇(同一簇中的位置比较接近),可以使用经典聚类方法(比如k均值聚类算法)。将采样数据信息总和最大的簇中的未连接移动机器人放到备用移动机器人集合targrs中。
[0035]
5.4航迹部署模块假定u1,
…
,un,
…
,un与相连的地面移动机器人间的所有链路都为直视传播,将公式
⑴
构造为网络g形成问题,其目标是形成空中多跳回程网络,允许每个空中移动无人机中继通过最多一条路径连接到基站,并通过较少的跳数连接尽可能多的地面移动机器人。在网络g中,将固定基站定义为根节点。若存在直接互相通信的两个空中移动无人机中继ua和ub,若ua更靠近根节点,则称ua为ub的父节点,称ub为ua的子节点。直接通信的意思是ua和ub之间的通信链路的信噪比大于等于最小信噪比阈值snr
min
。定义直接通信为匹配,即若grm与un匹配,意味着grm与un间的通信链路的信噪比大于等于最小信噪比阈值
snr
min
。构造网络g的方法是:
[0036]
5.4.1航迹部署模块检查网络g的效用函数值。效用函数用式
⑴
的目标函数计算。具体计算方法为:例如,若网络路径如下:bs0连u1,u1连u2,gr1连u1,gr2连u2,则u2跳数为2,u1跳数为1。a1为gr1数据信息数量,a2为gr2数据信息数量,则ω取0.1。此例子中
[0037]
5.4.2航迹部署模块判断g中un和u
n’间是否存在通信连接,若不存在,转至5.4.3;若存在,转至5.4.7。
[0038]
5.4.3记录un原始位置;为使un与u
n’建立临时通信链路,并在位置上离集合targrs中心更近,施加虚拟斥力在un上,将un推至新位置使得离targrs更近(虚拟斥力为来自不同无人机的防撞排斥力和来自地面移动机器人或固定基站的吸引力的合力,具体计算方法参见u.challita和w.saad于2017年发表在ieee global communications conference的论文“network formation in the sky:unmanned aerial vehicles for multi-hop wireless backhauling(空中网络形成:多跳无线无人机回程网络)”的第四页);
[0039]
5.4.4若新位置导致un与其子节点无人机中继u
n”超过了最大连接距离d,即断开了连接,则转至5.4.5;若un没有子节点无人机中继,或者新位置没有导致un与子节点无人机中继断开连接,转至5.4.6。无人机中继un与其子节点无人机中继u
n'’间的最大连接距离d根据公式(6)计算,
[0040][0041]
其中,pn为无人机中继un的发射功率、b为空对空通信链路信道带宽。
[0042]
5.4.5un退回原始位置。定义与u
n’连接的地面移动机器人为集合gr
un’(假设有m2个,1≤m2≤m,m2为正整数)。对gr
un’中每个地面移动机器人(令其中任意一个为grf,1≤f≤m2)进行如下操作:判断grf与un间的通信链路的接收信噪比是否大于等于最小信噪比阈值snr
min
(一般设为-4db(分贝)),若满足则断开grf与u
n’间的连接,构建grf与un间的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则令g=g’;若g更好,保留g。对gr
un’中所有地面移动机器人判断完后转至5.5。
[0043]
5.4.6根据式
⑷
,分别计算targrs中的地面移动机器人与un构建的通信链路的接收信噪比,看其是否大于等于最小信噪比阈值snr
min
。对targrs中满足的地面移动机器人构建其与un间的通信链路,构建un和u
n’的连接代替un与其父节点之间的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则令g=g’,转5.5;若g更好,则un退回原始位置,保留g,转5.5。
[0044]
5.4.7删除un和u
n’的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则将g’赋值给g;若g更好,保留g。判断与u
n’连接的gr
un’是否与un连接会更好,判断方法同5.4.5,即对gr
un’中每个地面移动机器人(令其中任意一个为grq,1≤q≤m)进行如下操作:判断grq与un间的通信链路的接收信噪比是否大于等于最小信噪比阈值snr
min
),若满足则断开grq与u
n’间的连接,构建grq与un间的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则令g=g’;
若g更好,保留g。对gr
un’中所有地面移动机器人判断完后表示网络g构建完毕,转至5.5。
[0045]
5.5定义与un相连的地面移动机器人的集合为gr
un
。判断gr
un
是否为空,若不为空,转至5.6;若为空,转至5.7。
[0046]
5.6根据网络g的拓扑结构,将公式
⑴
转化为一个多目标优化问题,再通过将最大的权重分给离固定基站较近的无人机,越远的无人机权重越小,将其转换为多个单目标优化问题,求解得到无人机中继的最优部署位置x
un
。具体步骤为:
[0047]
5.6.1定义从固定基站到无人机un的路径为ρn,ρn={u
l1
,u
l2
,...,u
ln
}(u
l1
=bs0,u
ln
=un);根据网络g的拓扑结构,公式
⑴
转化为一个多目标优化问题,即优化无人机的位置以满足通信质量和传输更多数据,由式(7)表示:
[0048][0049]
其中,由式
⑸
可知,当无人机在与地面移动机器人构成直视通信的区域时(x
un
∈d
los
,d
los
为能与地面移动机器人构成直视通信的空中区域),ψ
nm
的高斯分布参数均值为μ
ij,los
,方差为当无人机在与地面移动机器人构成非直视通信的区域时(x
un
∈d
nlos
,d
nlos
为与地面移动机器人构成非直视通信的空中区域),ψ
nm
的高斯分布参数均值为μ
ij,nlos
,方差为因此ψ
nm
是x
un
的阶梯函数,式(7)是一个非凸优化问题。
[0050]
5.6.2类似于自然界中树根的方向可以决定树的生长方向,靠近树根(固定基站)的无人机的位置也可决定网络可以连接的地面移动机器人。因此将最大的权重分给离固定基站较近的无人机,越远的无人机权重越小。基于此,可以先优化离固定基站较近的无人机,再优化其子节点无人机。因此,式(7)的多目标优化问题转化为多个单目标优化问题。
[0051]
5.6.3由于无人机离地面移动机器人越近,他们之间是直视通信的可能性就越大,因此将式(7)的目标函数近似为最小化un和targrs中心(集合中心的计算方法是取集合内所有地面移动机器人坐标的平均值)之间的距离。此时,若ψ
nm
的值是确定的(ψ
nm
的值可以取μ
ij,los
和μ
ij,nlos
两种,若ψ
nm
可以固定为其中一种则ψ
nm
为确定的),则式(7)为凸问题,可以使用经典凸问题求解方法解决(比如内点法)。因此需将ψ
nm
的值转化为确定的值,采用基于los条件的划分方法(可以参照s.yang和d.shi等人2021年发表在ieee secon上的论文“joint communication motion planning for uav relaying in urban areas(城市地区无人机中继的联合通信运动规划)的第五页)将ψ
nm
的值转化为确定的值。
[0052]
5.6.4将ψ
nm
的值转化为确定的值后,用经典凸问题求解方法求解(比如内点法)式(7)得到最终解,即最优部署位置x
un
。
[0053]
5.7此时的x
un
就是规划出的满足通信条件的无人机中继un的部署位置;此时的网络g就是满足通信条件的网络g,判断网络g是否收敛。(判断收敛的标准是将现在的网络与上一次的网络进行对比,若两次网络相同的次数超过一定相同次数阈值(相同次数阈值一般设为100次),则认为收敛;或者运行次数y超过运行次数阈值(运行次数阈值一般设为600次),也认为收敛)。若未收敛,转至5.3;若收敛,则得到最终网络g(包含u的最优部署位置、u之间的连接关系、u与地面移动机器人的匹配关系),将最终网络g的信息(即u的最优部署位置、u之间的连接关系、u与地面移动机器人的匹配关系)发送给与固定基站相连的空中移动无人机中继u1,u2,
…
,ua,
…
,u
a’的运动控制模块,1≤a’≤n,a’为与固定基站相连的空中移动无人机中继的个数。
[0054]
第六步,空中移动无人机中继u1,u2,
…
,un,
…
,un的运动控制模块接收最终网络g中u的最优部署位置,根据u的最优部署位置控制u1,u2,
…
,un,
…
,un到达部署位置,u1,u2,
…
,un,
…
,un的数据转发模块接收最终网络g的信息。同时,地面移动机器人gr1,
…
,grm,
…
,grm按照预先规划到达第t个时间间隔的终点位置。具体步骤为:
[0055]
6.1与固定基站直接相连的空中移动无人机中继u1,u2,
…
,ua,
…
,u
a’的数据转发模块并行接收从固定基站传来的最终网络g的信息。
[0056]
6.2u1,u2,
…
,ua,
…
,u
a’根据当前网络信息并行判断自身有无子节点并将最终网络g的信息传输给自身的子节点,各子节点的运动控制模块按照最终网络g的最优部署信息控制各子节点飞行到各子节点的最优部署位置;按此方法,直到各个节点全部飞行到最优部署位置。其中ua根据当前网络信息判断自身有无子节点并将最终网络g的信息传输给ua的子节点,直至与ua相连的子节点、子节点的子节点、
…
、最终叶子节点均按最终网络g的信息飞行到最优部署位置的方法是:
[0057]
6.2.1根据当前网络信息,若ua无子节点,转6.2.2;若ua有子节点,则ua将最终网络g的信息发送给ua的b个子节点并按最终网络g的信息飞行到ua的最优部署位置。令b个子节点中的任意一个为ub(1≤b≤n,b为与ua直接相连的空中移动无人机中继的个数),b个子节点的数据转发模块并行接收父节点ua传来的最终网络g的信息。令ua=ub,即把子节点赋值给父节点,相当于路径往后走了一跳,转6.2.1。循环实现子节点按最终网络g的信息部署到最优部署位置;
[0058]
6.2.2ua的运动控制模块从定位装置获得ua当前位置,若ua当前位置不是ua的最优部署位置,则飞行到最终网络g的信息中ua的最优部署位置,转第七步;若ua当前位置恰好是ua的最优部署位置,则直接转第七步。
[0059]
第七步,u1,u2,
…
,un,
…
,un判断gr1,
…
,grm,
…
,grm是否已到达第t个时间间隔的终点位置,若未到达,转第七步等待并判断;若已到达,u1,u2,
…
,un,
…
,un按照时分多址的方式与其具有通信关系的地面移动机器人间开始数据传输,方法为:
[0060]
7.1此时u1,u2,
…
,un,
…
,un到达了最终网络g的最优部署位置,gr1,
…
,grm,
…
,grm到达了第t个时间间隔的终点位置,u1,u2,
…
,un,
…
,un的数据转发模块根据最终网络g的信息中空中移动无人机中继与地面移动机器人的匹配关系,与地面移动机器人构建通信连接。
[0061]
7.2gr1,
…
,grm,
…
,grm的数据采集模块根据构建的通信连接将各自的图片数据信息(如kinect传感器或摄像机采集的图片数据信息)根据最终网络g的信息中空中移动无人
机中继与地面移动机器人的匹配关系发送给与其直接相连的空中移动无人机中继(令为u1,u2,
…
,uc,
…
,uc(1≤c≤n,c为与地面移动机器人直接相连的空中移动无人机中继个数,c为正整数))的数据转发模块,具体的,假设uc与grm构建通信连接,grm的数据采集模块将grm的图片数据信息发送给uc的数据转发模块。
[0062]
第八步,与地面移动机器人直接相连的空中移动无人机中继u1,u2,
…
,uc,
…
,uc的数据转发模块并行从地面移动机器人接收图片数据信息,将所有地面移动机器人的图片数据信息构成的总采集数据信息按照最终网络g的信息中的u1,u2,
…
,un,
…
,un之间连接关系转发给其父节点的数据转发模块,直至转发给固定基站的数据接收处理模块。其中uc将与其通信的所有地面移动机器人发送的总图片数据信息按最终网络g的信息中u1,u2,
…
,un,
…
,un之间连接关系转发给固定基站的数据接收处理模块的方法是:
[0063]
8.1uc根据最终网络g的信息判断自身父节点是否为固定基站。若uc父节点为固定基站,转8.1.2;若uc父节点不是固定基站,则将父节点令为ud,uc的数据转发模块将总图片数据信息传给ud,令uc=ud,把父节点赋值给子节点相当于路径往基站走了一跳,转8.1.1循环实现子节点按最终网络g的信息将总图片数据信息传递给父节点,最终传递给固定基站。
[0064]
8.2uc的数据转发模块将总图片数据信息发送给固定基站的数据接收处理模块。
[0065]
第九步,固定基站的数据接收处理模块接收与其相连的u1,u2,
…
,ua,
…
,u
a’发送的总采集数据信息,对总采集数据信息进行处理;同时判断采集任务是否完成,若完成则结束任务,若未完成则待第t个时间间隔结束,转入下一时间间隔。具体方法是:
[0066]
9.1数据接收处理模块接收u1,u2,
…
,ua,
…
,u
a’发送的总采集数据信息。
[0067]
9.2数据接收处理模块对总采集数据信息(即地面移动机器人利用kinect采集的图片数据信息)进行图像识别,得到图像识别结果;同时数据接收处理模块根据总采集信息的数据内容判断任务是否完成,若已经采集到关注目标(关注目标可以是重点公共设施、监测的建筑物等)的信息,表示任务完成,转至第十步;若没有相关信息,表示不充足,转至9.3。
[0068]
9.3等待第t个时间间隔结束,令t=t+1,转至第三步,进入下一时间间隔的中继部署数据传输过程。
[0069]
第十步,结束。
[0070]
本发明提供的技术方案的有益效果是:
[0071]
1、本发明联合考虑无人机位置规划、无人机之间的连接关系、无人机与地面移动机器人的匹配关系以及环境中障碍物的存在,与其他方法相比在保障中继任务的前提下,可确保部署的无人机与地面移动机器人间均为直视通信,这样能保障系统所需的通信质量,使得部署的网络能传输回更多数据,提升任务完成性能(指能传输回更多数据,更有可能能发现目标信息)。
[0072]
2、本发明考虑空对地通信间存在障碍物的情况,考虑了直视通信与非直视通信的处理,比现有研究只考虑直视通信或考虑概率直视通信的方法更符合实际情况且更有实际应用价值。
[0073]
3、本发明方法第五步通过将问题构造为空对地网络形成问题和多目标优化问题交替求解,通过先确定网络拓扑后细化具体位置的方式,降低求解难度的同时且能保障更准确的空中移动无人机中继的位置,使得最终构建的通信链路更可靠。
附图说明
[0074]
图1为本发明总体流程图;
[0075]
图2是本发明第一步构建的多无人机中继系统总体逻辑结构图;
[0076]
图3为本发明第五步中构建的树状网络拓扑结构示意图;
[0077]
图4为本发明与背景技术一方法规划出的多无人机中继部署结果对比图,图(a)为背景技术一方法,图(b)为本发明方法;
[0078]
图5为在空中移动无人机中继数量不同情况下,本发明与背景技术一在空对地通信信道有效率方面的效果对比图。
[0079]
图6为在空中移动无人机中继数量不同情况下,本发明与背景技术一在总采集数据信息方面的效果对比图。
具体实施方式
[0080]
下面将结合附图和实施例对本发明的技术方案作进一步的说明。
[0081]
实施例1
[0082]
以下以多无人机中继多地面移动机器人监测场景为例说明本发明的具体实施方式。本发明中选取改装的轮式移动机器人turtlebot作为地面移动机器人,地面移动机器人上装载定位装置、kinect传感器、摄像头、数据信号发射接收器。选取四旋翼无人机作为空中移动无人机中继,并装载定位装置、数据信号发射接收器。
[0083]
图1是本发明的整体流程图。如图1所示,实施例1包括以下步骤:
[0084]
第一步,构建如图2所示的多无人机中继系统,多无人机中继系统由n个空中移动无人机中继(用u1,
…
,un,
…
,un表示,1≤n≤n)、m个地面移动机器人(用gr1,
…
,grm,
…
,grm表示,1≤m≤m)和一个固定基站(用bso表示)组成,m和n均为正整数。地面移动机器人是同构或异构机器人,如无人车、人形机器人等。空中移动无人机中继是具有数据转发功能的旋翼无人机。固定基站是具有良好计算能力的资源可控的计算设备,可以运行计算密集型或者知识密集型的机器人应用,主要用于部署空中移动无人机中继并处理接收的数据信息。地面移动机器人与空中移动无人机中继之间通过存在障碍物的空对地通信链路进行通信,空中移动无人机中继之间、空中移动无人机中继和固定基站之间通过无障碍物的空对空通信链路进行通信,一个空中移动无人机中继可以与多个地面移动机器人通信,但一个地面移动机器人只能与一个空中移动无人机中继通信。
[0085]
m个地面移动机器人上安装的软件相同,第m个地面移动机器人grm除了装有操作系统ubuntu16.04、机器人操作系统ros ros kinetic、定位装置外,还装有数据采集模块(kinect传感器)。将时间离散为多个时间间隔,每个时间间隔分为时长固定的阶段一和时长不固定的阶段二。阶段一时,地面移动机器人grm根据用户预先规划的任务路线前进。数据采集模块进行数据采集,将采集到的数据信息存储起来,在阶段一起点位置处将预先规划好的阶段一的终点位置信息和数据采样率am(即每秒采集的数据量,单位:比特/秒)(kinect传感器自带)发送给与其通信的空中移动无人机中继。阶段二时,数据采集模块在地面移动机器人grm阶段一所处的终点位置处向与其通信的空中移动无人机中继发送当前时间段的图片数据信息(如kinect传感器获取的图片数据信息,或摄像头获取的图片数据信息。
[0086]
n个空中移动无人机中继上安装的软件相同,第n个无人机中继un除了装有操作系统(ubuntu16.04)、机器人操作系统(ros kinetic)、定位装置外,还装有数据转发模块和运动控制模块。un的数据转发模块接收与un通信的地面移动机器人(令为grm)发送的数据采样率am、第t个时间间隔终点grm位置信息,并通过定位装置获取un位置信息,将am、t和un位置信息转发给与un通信的前一个空中移动无人机中继u
n-1
,按此规律依次转发,直至转发给固定基站。un的数据转发模块接收固定基站传来的un与其它空中移动无人机中继的通信关系、un与地面移动机器人间的通信关系,并转发给与un通信的其它空中移动无人机中继节点;un的数据转发模块还接收并转发与其通信的所有地面移动机器人发送的总图片数据信息给固定基站。同时,un的运动控制模块通过定位装置获取当前位置,并根据从固定基站传来的最优部署位置,飞行到最优部署位置。
[0087]
固定基站上除了装有操作系统(ubuntu16.04)外,还装有数据接收处理模块以及航迹部署模块。数据接收处理模块并行接收并处理与固定基站通信的无人机中继发送来的总采集数据信息(同一时间虽只有部分无人机与基站直接相连,但是所有无人机的数据都会通过网络传给基站。根据总采集数据信息判断发送该信息的空中移动无人机中继(令为un)的任务是否完成并决定是否继续进行下一时间间隔的对关注目标的信息采集。航迹部署模块接收un转发的地面移动机器人在第t个时间间隔终点位置信息、数据采样率am、un位置信息,根据环境中障碍物信息以及当前通信环境信息规划出满足通信质量条件且能在较少时延内传输更多地面移动机器人采集的数据的un的部署策略(包括un的最优部署位置、un与其它空中移动无人机中继的通信关系、un与地面移动机器人的通信关系),将un的部署策略发送给un。
[0088]
第二步,初始化时间间隔序号t=1;初始化阶段一ti和阶段二t
ii
,ti和t
ii
以秒为单位。ti时长固定,一般设置为30秒。t
ii
时长设置为地面移动机器人通过无人机中继传到固定基站的数据传输时长。
[0089]
第三步,m个地面移动机器人的数据采集模块并行进行图片数据信息的采集,m个地面移动机器人进行数据采集的方法相同,但是m个地面移动机器人的数据采集能力不同,用am表示地面第m个移动机器人grm的数据采样率,即每秒采集的数据量(单位为比特/秒),am即为数据采集模块(即kinect传感器)的采样速率。在第t个时间间隔开始时,grm的数据采集模块将数据采样率am和第t个时间间隔终点grm位置信息发送给与其通信的空中移动无人机中继(令为un)。
[0090]
第四步,un的数据转发模块将grm的数据采样率am和第t个时间间隔终点grm位置信息发送给固定基站的航迹部署模块。同时,un通过定位装置获取un的位置信息,并将un的位置信息转发给固定基站的航迹部署模块。
[0091]
第五步,固定基站的航迹部署模块从un接收grm的数据采样率am、第t个时间间隔grm终点位置信息以及un的位置信息,根据环境中障碍物信息和当前通信环境信息规划出un的部署策略(即最终网络g的信息),即un的最优部署位置、un与其他无人机中继的连接关系以及un与地面移动机器人间的通信关系,并将un的部署策略发送给un。方法是:
[0092]
5.1航迹部署模块从un接收grm的数据采样率am、第t个时间间隔grm终点位置信息以及空中移动无人机中继un的位置信息,构建以在较短时延内传输更多地面移动机器人采集的数据的网络为目标的多空中移动无人机中继部署(包括u的最优部署位置、u之间的连
接关系、u与地面移动机器人的匹配关系)的数学模型,该数学模型由公式
⑴
表示:
[0093][0094]
其中,x
un
表示空中移动无人机中继un的位置。j表示优化目标,含义为带权重的(ω)时延与传输数据量的差值,j越小说明网络g效果越好。采用时分多址来避免不同通信信道之间的相互干扰,即每个通信链路都被分配一个专属的数据传输时隙。定义t
nn'
表示空中移动无人机中继un与u
n’通信时的传输时隙,t
nm
表示空中移动无人机中继un与地面移动机器人grm通信时的传输时隙,t
on
表示基站bso与空中移动无人机中继un与通信时的传输间隙。ω表示一个权衡参数,可以权衡更小的数据传输延迟和传输更多数据之间的重要性,一般根据经验设置为0到0.2之间的数字,数字越小表示传输更多数据越重要。表示m个地面移动机器人采集的数据经过多无人机中继系统之间的通信网络g(即u1,
…
,un,
…
,un之间的通信关系、u1,
…
,un,
…
,un与gr1,
…
,grm,
…
,grm的通信关系;u1,
…
,un,
…
,un的最优部署位置)传输到固定基站bso所需的时间(即时延)。为了表示通信网络g中的时延,定义从与地面移动机器人grm直接相连的无人机中继u
l
到固定基站bso的路径为pa
l
=u
l1ul2
...u
lkulk+1
...u
lk
,1≤l≤m,1≤k《k,k≤n,k是pa
l
中经过无人机的总数,k和k都是正整数,u
l1
=u
l
,u
lk
=bso,u
l2
是与u
l1
通信的空中移动无人机中继,u
lk+1
是与u
lk
通信的空中移动无人机中继(路径pa
l
的开头是与地面移动机器人grm直接相连的无人机中继u
l
,路径pa
l
的结尾是固定基站bso),且路径pa
l
上的相邻无人机中继间都存在通信链路。则t
delay_m
由公式
⑵
计算:
[0095][0096]
其中,t
m,l1
表示地面移动机器人grm与路径pa
l
上无人机中继u
l1
间数据的传输时间,t
lk,lk+1
表示路径pa
l
上无人机中继u
lk
与无人机中继u
lk+1
间数据的传输时间,t
lk-1,o
表示路径pa
l
上无人机中继u
lk-1
与基站bso间数据的传输时间。这三个参数统一表示为信息发送方i与信息接收方j(i代表地面移动机器人、无人机中继中任意一个,j代表无人机中继、固定基站中任意一个)间的数据传输时长,由式
⑶
计算:
[0097]
t
ij
=am/(bsu)
⑶
[0098]
其中,am表示在时长为ti时地面移动机器人grm采集的数据量(amti),su表示任意一
台空中移动无人机中继传输数据的频谱效率(单位为bit/s/hz),b表示所有空对空及空对地通信链路信道带宽。
[0099]
表示m台地面移动机器人采集的总数据量。t
nm
为无人机中继un和地面移动机器人grm间的数据传输时长。φ(t
nm
)为映射函数,当t
nm
》0时,φ(t
nm
)=1;反之,φ(t
nm
)=0。φ(t
nm
)实际含义是将时隙分配映射为通信网络拓扑结构,φ(t
nm
)=1表示如果t
nm
被分配给无人机中继un和地面移动机器人grm(t
nm
》0),则un和grm之间存在通信链路;φ(t
nm
)=0表示如果t
nm
被分配给无人机中继un和地面移动机器人grm,un和grm之间不存在通信链路。
[0100]
式
⑴
中snr
min
表示信道满足通信质量所需的最小信噪比阈值。snr
nn'
表示无人机un与u
n’之间信道的接收信噪比,snr
nm
表示无人机un与地面移动机器人grm之间信道的接收信噪比,snr
no
表示无人机un与基站bso之间信道的接收信噪比。snr
nn'
,snr
nm
,snr
no
这三个参数统一表示为信息发送方i与信息接收方j之间信道的接收信噪比,由式
⑷
计算:
[0101][0102]
其中,φ(t
ij
)表示i与j之间是否存在通信链路,pi表示信息发送方i的发射功率,n0表示加性高斯白噪声的功率谱密度,β表示路径损耗指数,d
ij
表示信息发送方i与信息接收方j之间的欧氏距离,ψ
ij
表示信息发送方i与信息接收方j之间的考虑衍射和多径的阴影衰落参数,ψ
ij
服从高斯随机分布,根据式
⑸
计算:
[0103][0104]
其中,ψ
ij,los
表示直视通信时的ψ
ij
,当通信信道不经过障碍物时,为直视通信即los时,ψ
ij,los
的高斯分布参数均值为μ
ij,los
,方差为ψ
ij,nlos
表示非直视通信时的ψ
ij
,当通信信道经过障碍物时,为非直视通信即nlos时,ψ
ij,los
的高斯分布参数均值为μ
ij,nlos
,方差为上述参数(μ
ij,los
、μ
ij,nlos
和)由信息发送方i与信息接收方j之间的通信夹角(即i与j形成的连线与水平线之间的夹角)共同决定,μ
ij,los
、μ
ij,nlos
和具体数值与计算方法参考p.ladosz和h.oh等人2019年发表在ieee robotics and automation letters第四期的论文“a hybrid approach of learning and model-based channel prediction for communication relay uavs in dynamic urban environments(动态城市环境下一种基于学习和模型的中继无人机通信信道的混合预测方法)”第三页的公式(4)、公式(5)和第七页的表格四,该文中第三页的表格一对应μ
ij,los
和μ
ij,nlos
的数值,将第七页的表格四中数值代入第三页的公式(4)、公式(5)可求得和的值。
[0105]
式
⑴
中dis(un,un′
)表示un与u
n’之间的欧氏距离,d
safe
表示不同无人机之间的最小安全距离,若距离小于安全距离则可能相撞。
[0106]
如图3所示,空心圆代表空中移动无人机,三角形代表固定基站bso,黑色圆代表地
面移动机器人。式
⑴
中φ(t
no
)表示un与基站之间是否存在通信链路,若存在通信链路,φ(t
no
)=1,若不存在通信链路,φ(t
no
)=0;表示至少有一个无人机un与基站bso相连;φ(t
nm
)表示un与grm之间是否存在通信链路,若存在通信链路,φ(t
nm
)=1,若不存在通信链路,φ(t
nm
)=0;表示grm至多与一个无人机相连;φ(t
nn
′
)表示un与u
n’之间是否存在通信连接,若存在通信连接,φ(t
nn
′
)=1,若不存在通信连接,φ(t
nn
′
)=0;表示无人机与基站之间及无人机之间形成的边(信息发送方i与信息接收方j之间有边则表示信息发送方i与信息接收方j之间存在通信连接)的数量等于空中移动无人机中继的数量n。这几个约束保证了通信网络g的树状网络拓扑结构。如图3所示,树状的网络拓扑结构含义为一个以固定基站为根的双向树状结构的网络,它允许每个空中移动无人机中继或地面移动机器人最多通过一条路径连接到固定基站,如图3中grm通过un与固定基站bso连接。
[0107]
式
⑴
中表示时隙约束,即分配给每个链路的时隙都要有足够长的时间让un传输完相关数据。un不仅要传输来自与其通信的grm的数据,还要传输来自与其通信的其它空中移动无人机中继的数据,an表示un需要转发的数据量,am是地面移动机器人grm采集的数据量。
[0108]
5.2初始化运行次数y为零。
[0109]
5.3令运行次数y=y+1。根据赋予的权重(如剩余电量、与固定基站间的距离、机载通信设备的良好程度等)从n个空中移动无人机中继选择一台无人机,令为un,随机且均匀的激活另一空中移动无人机中继u
n’,将所有未与当前网络g连接的地面移动机器人放到未连接移动机器人集合ungrs中。使用k均值聚类算法对ungrs根据位置进行聚类,得到多个簇,)将采样数据信息总和最大的簇中的未连接移动机器人放到备用移动机器人集合targrs中。
[0110]
5.4航迹部署模块假定u1,
…
,un,
…
,un与相连的地面移动机器人间的所有链路都为直视传播,将公式
⑴
构造为网络g形成问题,其目标是形成空中多跳回程网络,允许每个空中移动无人机中继通过最多一条路径连接到基站,并通过较少的跳数连接尽可能多的地面移动机器人。在网络g中,将固定基站定义为根节点。若存在直接互相通信的两个空中移动无人机中继ua和ub,若ua更靠近根节点,则称ua为ub的父节点,称ub为ua的子节点。直接通信的意思是ua和ub之间的通信链路的信噪比大于等于最小信噪比阈值snr
min
。定义直接通信为匹配,即若grm与un匹配,意味着grm与un间的通信链路的信噪比大于等于最小信噪比阈值snr
min
。构造网络g的方法是:
[0111]
5.4.1航迹部署模块检查网络g的效用函数值。效用函数用式
⑴
的目标函数计算。具体计算方法为:例如,若网络路径如下:bs0连u1,u1连u2,gr1连u1,gr2连u2,则u2跳数为2,u1跳数为1。a1为gr1数据信息数量,a2为gr2数据信息数量,则ω取0.1。此例子中
[0112]
5.4.2航迹部署模块判断g中un和u
n’间是否存在通信连接,若不存在,转至5.4.3;若存在,转至5.4.7。
[0113]
5.4.3记录un原始位置;为使un与u
n’建立临时通信链路,并在位置上离集合targrs中心更近,施加虚拟斥力在un上,将un推至新位置使得离targrs更近(虚拟斥力为来自不同无人机的防撞排斥力和来自地面移动机器人或固定基站的吸引力的合力,具体计算方法参见u.challita和w.saad于2017年发表在ieee global communications conference的论文“network formation in the sky:unmanned aerial vehicles for multi-hop wireless backhauling(空中网络形成:多跳无线无人机回程网络)”的第四页);
[0114]
5.4.4若新位置导致un与其子节点无人机中继u
n”超过了最大连接距离d,即断开了连接,则转至5.4.5;若un没有子节点无人机中继,或者新位置没有导致un与子节点无人机中继断开连接,转至5.4.6。无人机中继un与其子节点无人机中继u
n'’间的最大连接距离d根据公式(6)计算,
[0115][0116]
其中,pn为无人机中继un的发射功率、b为空对空通信链路信道带宽。
[0117]
5.4.5un退回原始位置。定义与u
n’连接的地面移动机器人为集合gr
un’(假设有m2个,1≤m2≤m,m2为正整数)。对gr
un’中每个地面移动机器人(令其中任意一个为grf,1≤f≤m2)进行如下操作:判断grf与un间的通信链路的接收信噪比是否大于等于最小信噪比阈值snr
min
(设为-4db(分贝)),若满足则断开grf与u
n’间的连接,构建grf与un间的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则令g=g’;若g更好,保留g。对gr
un’中所有地面移动机器人判断完后转至5.5。
[0118]
5.4.6根据式
⑷
,分别计算targrs中的地面移动机器人与un构建的通信链路的接收信噪比,看其是否大于等于最小信噪比阈值snr
min
。对targrs中满足的地面移动机器人构建其与un间的通信链路,构建un和u
n’的连接代替un与其父节点之间的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则令g=g’,转5.5;若g更好,则un退回原始位置,保留g,转5.5。
[0119]
5.4.7删除un和u
n’的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则将g’赋值给g;若g更好,保留g。判断与u
n’连接的gr
un’是否与un连接会更好,判断方法同5.4.5,即对gr
un’中每个地面移动机器人(令其中任意一个为grq,1≤q≤m)进行如下操作:判断grq与un间的通信链路的接收信噪比是否大于等于最小信噪比阈值snr
min
),若满足则断开grq与u
n’间的连接,构建grq与un间的连接,形成网络g’。计算并比较g与g’的效用函数值,效用函数值j更小的网络效果更好。若g’更好,则令g=g’;若g更好,保留g。对gr
un’中所有地面移动机器人判断完后表示网络g构建完毕,转至5.5。
[0120]
5.5定义与un相连的地面移动机器人的集合为gr
un
。判断gr
un
是否为空,若不为空,转至5.6;若为空,转至5.7。
[0121]
5.6根据网络g的拓扑结构,将公式
⑴
转化为一个多目标优化问题,再通过将最大的权重分给离固定基站较近的无人机,越远的无人机权重越小,将其转换为多个单目标优化问题,求解得到无人机中继的最优部署位置x
un
。具体步骤为:
[0122]
5.6.1定义从固定基站到无人机un的路径为ρn,ρn={u
l1
,u
l2
,...,u
ln
}(u
l1
=bs0,u
ln
=un);根据网络g的拓扑结构,公式
⑴
转化为一个多目标优化问题,即优化无人机的位置以满足通信质量和传输更多数据,由式(7)表示:
[0123][0124]
其中,由式
⑸
可知,当无人机在与地面移动机器人构成直视通信的区域时(x
un
∈d
los
,d
los
为能与地面移动机器人构成直视通信的空中区域),ψ
nm
的高斯分布参数均值为μ
ij,los
,方差为当无人机在与地面移动机器人构成非直视通信的区域时(x
un
∈d
nlos
,d
nlos
为与地面移动机器人构成非直视通信的空中区域),ψ
nm
的高斯分布参数均值为μ
ij,nlos
,方差为因此ψ
nm
是x
un
的阶梯函数,式(7)是一个非凸优化问题。
[0125]
5.6.2类似于自然界中树根的方向可以决定树的生长方向,靠近树根(固定基站)的无人机的位置也可决定网络可以连接的地面移动机器人。因此将最大的权重分给离固定基站较近的无人机,越远的无人机权重越小。基于此,可以先优化离固定基站较近的无人机,再优化其子节点无人机。因此,式(7)的多目标优化问题转化为多个单目标优化问题。
[0126]
5.6.3由于无人机离地面移动机器人越近,他们之间是直视通信的可能性就越大,因此将式(7)的目标函数近似为最小化un和targrs中心之间的距离。此时,若ψ
nm
的值是确定的(ψ
nm
的值可以取μ
ij,los
和μ
ij,nlos
两种,若ψ
nm
可以固定为其中一种则ψ
nm
为确定的),则式(7)为凸问题,使用内点法解决。因此需将ψ
nm
的值转化为确定的值,采用基于los条件的划分方法(可以参照s.yang和d.shi等人2021年发表在ieee secon上的论文“joint communication motion planning for uav relaying in urban areas(城市地区无人机中继的联合通信运动规划)的第五页)将ψ
nm
的值转化为确定的值。
[0127]
5.6.4将ψ
nm
的值转化为确定的值后,用经典凸问题求解方法求解(比如内点法)式(7)得到最终解,即最优部署位置x
un
。
[0128]
5.7此时的x
un
就是规划出的满足通信条件的无人机中继un的部署位置;此时的网络g就是满足通信条件的网络g,判断网络g是否收敛。(判断收敛的标准是将现在的网络与上一次的网络进行对比,若两次网络相同的次数超过一定相同次数阈值(相同次数阈值设为100次),则认为收敛;或者运行次数y超过运行次数阈值(运行次数阈值设为600次),也认为收敛)。若未收敛,转至5.3;若收敛,则得到最终网络g(包含u的最优部署位置、u之间的连接关系、u与地面移动机器人的匹配关系),将最终网络g的信息(即u的最优部署位置、u之间的连接关系、u与地面移动机器人的匹配关系)发送给与固定基站相连的空中移动无人机中继u1,u2,
…
,ua,
…
,u
a’的运动控制模块,1≤a’≤n,a’为与固定基站相连的空中移动无人机
中继的个数。
[0129]
第六步,空中移动无人机中继u1,u2,
…
,un,
…
,un的运动控制模块接收最终网络g中u的最优部署位置,根据u的最优部署位置控制u1,u2,
…
,un,
…
,un到达部署位置,u1,u2,
…
,un,
…
,un的数据转发模块接收最终网络g的信息。同时,地面移动机器人gr1,
…
,grm,
…
,grm按照预先规划到达第t个时间间隔的终点位置。具体步骤为:
[0130]
6.1与固定基站直接相连的空中移动无人机中继u1,u2,
…
,ua,
…
,u
a’的数据转发模块并行接收从固定基站传来的最终网络g的信息。
[0131]
6.2u1,u2,
…
,ua,
…
,u
a’根据当前网络信息并行判断自身有无子节点并将最终网络g的信息传输给自身的子节点,各子节点的运动控制模块按照最终网络g的最优部署信息控制各子节点飞行到各子节点的最优部署位置;按此方法,直到各个节点全部飞行到最优部署位置。其中ua根据当前网络信息判断自身有无子节点并将最终网络g的信息传输给ua的子节点,直至与ua相连的子节点、子节点的子节点、
…
、最终叶子节点均按最终网络g的信息飞行到最优部署位置的方法是:
[0132]
6.2.1根据当前网络信息,若ua无子节点,转6.2.2;若ua有子节点,则ua将最终网络g的信息发送给ua的b个子节点并按最终网络g的信息飞行到ua的最优部署位置。令b个子节点中的任意一个为ub(1≤b≤n,b为与ua直接相连的空中移动无人机中继的个数),b个子节点的数据转发模块并行接收父节点ua传来的最终网络g的信息。令ua=ub,即把子节点赋值给父节点,相当于路径往后走了一跳,转6.2.1。循环实现子节点按最终网络g的信息部署到最优部署位置;
[0133]
6.2.2ua的运动控制模块从定位装置获得ua当前位置,若ua当前位置不是ua的最优部署位置,则飞行到最终网络g的信息中ua的最优部署位置,转第七步;若ua当前位置恰好是ua的最优部署位置,则直接转第七步。
[0134]
第七步,u1,u2,
…
,un,
…
,un判断gr1,
…
,grm,
…
,grm是否已到达第t个时间间隔的终点位置,若未到达,转第七步等待并判断;若已到达,u1,u2,
…
,un,
…
,un按照时分多址的方式与其具有通信关系的地面移动机器人间开始数据传输,方法为:
[0135]
7.1此时u1,u2,
…
,un,
…
,un到达了最终网络g的最优部署位置,gr1,
…
,grm,
…
,grm到达了第t个时间间隔的终点位置,u1,u2,
…
,un,
…
,un的数据转发模块根据最终网络g的信息中空中移动无人机中继与地面移动机器人的匹配关系,与地面移动机器人构建通信连接。
[0136]
7.2gr1,
…
,grm,
…
,grm的数据采集模块根据构建的通信连接将各自的图片数据信息(如kinect传感器或摄像机采集的图片数据信息)根据最终网络g的信息中空中移动无人机中继与地面移动机器人的匹配关系发送给与其直接相连的空中移动无人机中继(令为u1,u2,
…
,uc,
…
,uc(1≤c≤n,c为与地面移动机器人直接相连的空中移动无人机中继个数,c为正整数))的数据转发模块,具体的,假设uc与grm构建通信连接,grm的数据采集模块将grm的图片数据信息发送给uc的数据转发模块。
[0137]
第八步,与地面移动机器人直接相连的空中移动无人机中继u1,u2,
…
,uc,
…
,uc的数据转发模块并行从地面移动机器人接收图片数据信息,将所有地面移动机器人的图片数据信息构成的总采集数据信息按照最终网络g的信息中的u1,u2,
…
,un,
…
,un之间连接关系转发给其父节点的数据转发模块,直至转发给固定基站的数据接收处理模块。如图3所示,un’的转发路径为:u
n’→
un→
bso。其中uc将与其通信的所有地面移动机器人发送的总图片数据信息按最终网络g的信息中u1,u2,
…
,un,
…
,un之间连接关系转发给固定基站的数据接收处理模块的方法是:
[0138]
8.1uc根据最终网络g的信息判断自身父节点是否为固定基站。若uc父节点为固定基站,转8.1.2;若uc父节点不是固定基站,则将父节点令为ud,uc的数据转发模块将总图片数据信息传给ud,令uc=ud,把父节点赋值给子节点相当于路径往基站走了一跳,转8.1.1循环实现子节点按最终网络g的信息将总图片数据信息传递给父节点,最终传递给固定基站。
[0139]
8.2uc的数据转发模块将总图片数据信息发送给固定基站的数据接收处理模块。
[0140]
第九步,固定基站的数据接收处理模块接收与其相连的u1,u2,
…
,ua,
…
,u
a’发送的总采集数据信息,对总采集数据信息进行处理;同时判断采集任务是否完成,若完成则结束任务,若未完成则待第t个时间间隔结束,转入下一时间间隔。具体方法是:
[0141]
9.1数据接收处理模块接收u1,u2,
…
,ua,
…
,u
a’发送的总采集数据信息。
[0142]
9.2数据接收处理模块对总采集数据信息(即地面移动机器人利用kinect采集的图片数据信息)进行图像识别,得到图像识别结果;同时数据接收处理模块根据总采集信息的数据内容判断任务是否完成,若已经采集到关注目标(关注目标可以是重点公共设施、监测的建筑物等)的信息,表示任务完成,转至第十步;若没有相关信息,表示不充足,转至9.3。
[0143]
9.3等待第t个时间间隔结束,令t=t+1,转至第三步,进入下一时间间隔的中继部署数据传输过程。
[0144]
第十步,结束。
[0145]
本实施例中将背景技术一的采用概率直视通信信道的无人机部署方法作为对照组,图4给出了在相同环境(障碍物环境、通信环境以及固定基站、地面移动机器人部署均相同)下,有n=5架中继无人机和m=8个地面移动机器人执行任务时,在一个时间间隔内,本发明与背景技术一规划出的多无人机中继部署结果图如图4所示,长方体代表环境中的障碍物,三角形代表固定基站,地面的正方形代表地面移动机器人当前时间间隔的终点位置,深色直线代表空对地通信信道,浅色直线代表空对空通信信道,(gr3,1)代表第三个地面移动机器人需传输的数据量为1。空中的圆形代表本发明规划出的5架空中移动无人机中继的部署,空中的五角星代表背景技术一方法规划出的5架空中移动无人机中继的部署。从图4(a)可以看到,背景技术一假设障碍物均匀分布,其优化的无人机中继倾向于移动到概率上是直视通信的地方。而在现实世界中障碍物往往是随机分布的,如图4(a)所示,背景技术一的无人机中继不能保证所有通信都是直视通信,如u3与gr1的连线、u5与gr3的连线均经过障碍物,这样导致背景技术一部署的无人机中继不能保证地面移动机器人所需的通信质量。从图4(b)可以看到,本发明能在有障碍物的环境中规划出合适的多空中移动无人机中继部署,具体为u1直接连固定基站,u2、u3、u4、u5作为u1的子节点。且本发明规划的空中移动无人机中继与地面移动机器人的连线均为直视通信(如u1与gr1、gr3、gr4、gr8之间均不经过障碍物,u5与gr5相连且不经过障碍物。由此可以看出,空中移动无人机中继采用本发明规划后,全部为直视通信,即所有u和gr之间都是不经过障碍物的。这样能很好的满足地面移动机器人的通信需求。
[0146]
如图5、图6所示,进一步分别比较不同无人机中继数量时本发明与背景技术一的
空对地通信信道有效率以及总采集数据信息。空对地通信信道有效率定义为空对地直视通信的数量与地面移动机器人数量的比值。图5、图6分别给出了实施例中,在相同环境(障碍物环境、通信环境以及固定基站、地面移动机器人部署均相同)下,设置m=8个地面移动机器人执行任务时,在无人机中继架数(n)从2架到9架变化时,本发明与背景技术一部署的多无人机中继系统中空对地通信信道有效率(图5)、总采集数据信息(图6)。
[0147]
图5中带有圆形的线代表本发明的空对地通信信道有效率,带有星形的线代表背景技术一方法的空对地通信信道有效率。从图5中可以看到,随着无人机中继数量的增加,空对地通信信道有效率增加直到达到峰值。到达峰值后,本发明的空对地通信信道有效率在80%以上,背景技术一的空对地通信信道有效率在50%附近。本发明在保证通信质量方面有明显性能增益。
[0148]
图6中深色条形图代表本发明部署的多无人机中继系统能传输的总采集数据信息,浅色条形图代表背景技术一部署的多无人机中继系统能传输的总采集数据信息。从图6中可以看到,随着无人机中继数量的增加,两种方法部署的多无人机中继系统能传输的总采集数据信息增加直到达到峰值。到达峰值后,本发明部署的多无人机中继系统可传输的总采集数据信息最高是背景技术一方法的2倍,在系统传输数据量方面有明显性能增益。
[0149]
附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制。
[0150]
显然,本发明的上述实施例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1