一种用于相位调制同步解调的装置及方法与流程
1.本发明属于软件无线电技术领域,具体涉及一种用于相位调制同步解调的装置及方法。
背景技术:
2.解调技术分为相干解调和非相干解调,其中,相干解调适用于所有线性调制信号的解调。而实现相干解调最为关键的一步就是在接收端恢复出一个与发送端调制载波严格同频同相的相干载波,恢复的载波将极大影响系统的性能。
3.目前已经有了许多种针对于各种调制的载波同步方法,针对一些相位调制,主要有costas环、四相松尾环等方法,针对一些非相位调制,有cordic算法、dft算法等方法。然而,将cordic算法应用于相位调制的方法却非常少。
技术实现要素:
4.本发明提供了一种用于相位调制同步解调的装置及方法,主要是将cordic算法应用于相位调制相干解调中最为关键的载波同步,并使用fpga进行实现。
5.本发明通过以下技术方案予以实现:
6.本发明提供一种用于相位调制同步解调的装置,包括映射模块、相角存储模块、cordic算法模块、区域判决模块以及减法器;
7.所述映射模块输入为低通滤波器输出信号,所述映射模块输出端与cordic算法模块连接,用于简化区域判决模块的计算;
8.所述相角存储模块存入所用调制相邻两星座点相角的平均值的量化值,所述相角存储模块输出的相角量化值送入区域判决模块;
9.所述cordic算法模块输入为映射后的低通滤波信号,与区域判决模块相连,用于计算星座点相角;
10.所述区域判决模块输入为cordic算法模块计算的相角与相角存储模块输出的相邻星座点的平均相角量化值,所述区域判决模块输出星座点相角量化值和信号相角量化值与减法器相连,用来判决当前信号所属星座点;
11.所述减法器输入为区域判决模块输出的星座点相角量化值和信号相角量化值,所述减法器输出相差与二阶环路滤波器相连,用来控制本地载波相位。
12.本发明还提供一种用于相位调制同步解调的方法,包括以下步骤:
13.步骤1,对相干解调低通滤波后的两路数据进行映射;
14.将两路数据分别视作坐标轴里的横坐标与纵坐标,根据原点对称原理,有以下规则:
15.第一象限的横坐标与纵坐标不变;
16.第二象限的横坐标取反赋给纵坐标,赋值之前的纵坐标赋给横坐标;
17.第三象限的横坐标和纵坐标取反,横坐标赋给横坐标,纵坐标赋给纵坐标;
18.第四象限的横坐标赋给纵坐标,赋值之前的纵坐标取反赋给横坐标;
19.步骤2,将相位调制位于第一象限的星座点的角度量化成固定值存入寄存器,此处以16psk调制举例,其第一象限的星座点的角度分别为11.25
°
、33.75
°
、56.25
°
、78.75
°
,根据自定义寄存器的位宽将这四个角度量化成固定值;
20.步骤3,将星座点以原点为起点划分多个区域,以16psk调制为例,将其第一象限划分为四个区域,0
°
~22.5
°
为第一区域,22.5
°
~45
°
为第二区域,45
°
~67.5
°
为第三区域,67.5
°
~90
°
为第四区域,其中22.5
°
为11.25
°
与33.75
°
的平均值,45
°
为33.75
°
与56.25
°
的平均值,67.5
°
为56.25
°
与78.75
°
的平均值;
21.步骤4,将步骤3所划分区域,将0
°
、22.5
°
、45
°
、67.5
°
、90
°
根据自定义寄存器的位宽将这五个角度根据所定义位宽量化成固定值;
22.步骤5,使用cordic算法对步骤1所映射的横坐标与纵坐标求相角;
23.步骤6,根据步骤5所得相角按照步骤3的划分,判断相角所属区域;
24.步骤7,根据步骤6判断的区域,将区域对应相角与步骤5所得相角相减,以16psk为例,所述第一区域对应角度为步骤2所提及的11.25
°
,第二区域对应角度为步骤2所提及的33.75
°
,第三区域对应角度为步骤2所提及的56.25
°
,第四区域对应角度为步骤2所提及的78.75
°
;相减结果即为本地载波与接收信号载波的相位差,通过相位差即可调整本地载波相位实现相干解调。
25.与现有技术相比,本发明有益效果是:
26.1、普适性强,适用于所有星座图中心对称的相位调制。
27.2、相比于科斯塔斯环,本发明方法不使用乘法器,占用资源更少。
附图说明
28.图1为本发明装置的结构示意图;
29.图2为载波同步模块结构图;
30.图3为映射模块结构图;
31.图4为鉴相器模块结构图;
32.图5为16psk调制星座图;
33.图6为环路滤波器结构图;
34.图7为抽样判决模块结构图。
具体实施方式
35.以下结合附图和实施例对本发明作进一步说明。
36.如图1所示,本发明实施方式的一方面提供一种用于相位调制同步解调的装置,总体由载波同步模块、抽样判决模块、逆映射模块以及并串转换模块构成。载波同步模块结构如图2所示,包括ad采样模块、nco模块、乘法器模块、低通滤波器、映射模块、鉴相器模块、环路滤波器。
37.ad采样模块主要将模拟信号转为数字信号,本发明主要针对于相位调制,相位调制对应信号公式如下:
38.s(t)=acos(ωt)+bsin(ωt)
39.其中a和b分别为相位调制星座点的对应幅值的量化值,ω为角频率。
40.所述量化值与ad采样模块输出的数据宽度有关。
41.nco模块为数控振荡器,根据输入频率控制字产生指定频率的两路正交载波,使用fpga实现时可使用dds的ip核生成,设产生两路信号其中一路为i路,另一路为q路。给出信号对应公式如下:
42.s
carrieri
=cos(ωt+δθ)=cos(ωt)cos(δθ)-sin(ωt)sin(δθ)
43.s
carrierq
=sin(ωt+δθ)=sin(ωt)cos(δθ)+cos(ωt)sin(δθ)
44.其中δθ为本地载波与发送端信号的相差,所述频率控制字与发送端频率有对应关系如下:
45.m=f0*2n/fc46.其中m为频率控制字,f0为发送端频率,fc为dds的ip核所使用的工作时钟,n为设置ip核时频率控制字的数据宽度。
47.乘法器模块主要将ad转换后的信号与nco产生的两路正交载波相乘,使用fpga实现时可调用乘法器ip核进行实现,给出信号对应公式如下:
48.s
multi
=acos2(ωt)cos(δθ)-acos(ωt)sin(ωt)sin(δθ)+
49.bcos(ωt)sin(ωt)cos(δθ)-bsin2(ωt)sin(δθ)
50.s
multq
=acos(ωt)sin(ωt)cos(δθ)+acos2(ωt)sin(δθ)+
51.bsin2(ωt)cos(δθ)+bcos(ωt)sin(ωt)sin(δθ)
52.其中s
multi
为相乘后的i路信号,s
multq
为相乘后的q路信号,其它各个符号含义均与上文相同。
53.低通滤波器主要用于滤除经过乘法器后信号中的高频分量。使用fpga进行实现时,可使用matlab设计滤波器系数,再将数据导出,使用fpga内的滤波器ip核将来自matlab生成的滤波器系数导入,滤除高频分量后对应公式如下:
[0054][0055][0056]
其中s
filteri
为低通滤波后的i路信号,s
filterq
为低通滤波后的q路信号,c为所使用相位调制星座点的模值对应量化值,θ1为星座点对应角度。
[0057]
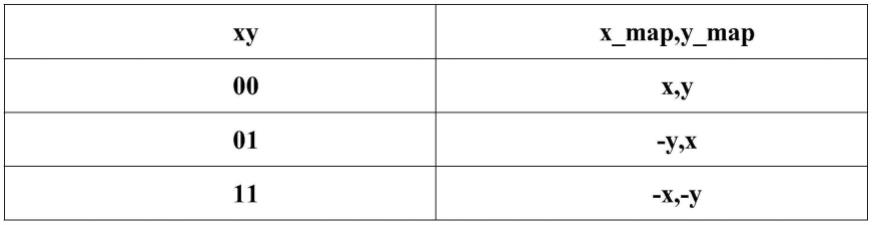
映射模块如图3所示,主要负责将坐标轴的第二、三、四象限根据零点对称关系,映射到第一象限。模块将输入值分别取反与原输入值进入四选二选择器,原输入值的符号位作为控制信号,设低通滤波后的i路信号为x,q路信号为y,信号表如表1所示,以下给出映射关系:
[0058][0059]
其中,x和y分别是i路和q路低通滤波后的信号,x1和y1分别为映射后的i路和q路信号。
[0060]
表1映射模块控制信号表
[0061][0062][0063]
鉴相器模块如图4所示,其核心为cordic算法模块,fpga进行实现时,可调用fpga内部ip核生成cordic模块,模块功能是求出映射后的i路和q路信号的相角。通过阈值判决相角所属区域,此阈值与星座图有关,以16psk为例,其星座图如图5所示,其第一象限四个星座点的相角分别为11.25
°
、33.75
°
、56.25
°
和78.75
°
,则阈值应设置为两两相角的中间值,即为22.5
°
、45
°
、67.5
°
,则0
°
~22.5
°
区域对应相角即为11.25
°
,其它以此类推,将区域对应相角与求得相角相减,即可得出发送端载波与接收端载波的相差,通过不断改变本地载波的相差即可完成相位同步。
[0064]
环路滤波器为二阶环路滤波器,其结构框图如图6所示。环路滤波器是本发明的一个重要组成部分,在结构图中,c1与c2表示滤波器系数,其计算公式如下:
[0065][0066][0067]
其中,ε为阻尼系数,一般取值为0.707;ωn为环路阻尼振荡频率;kd为环路增益;t为采样周期。
[0068]
实现过程中,c1与c2均可提前计算好并量化存入寄存器中使用,量化值与寄存器位宽有关。
[0069]
抽样判决模块结构如图7所示,通过输入频率控制字产生工作时钟,在每个时钟的上升沿对信号进行采样,将采样信号与按照星座图存入的固定值相对比,进行判决,将在一个固定值上下波动的信号全部转换为固定值。所述频率控制字公式如下:
[0070]
ftw=f0*2n/fc[0071]
其中ftw为频率控制字,f0为发送端频率,fc为开发板晶振频率,n为寄存器数据宽度。
[0072]
逆映射模块与发送端所使用的星座图有关,实现过程中把两个抽样判决模块的输出信号作为坐标,根据星座图找到星座点,再根据星座点恢复出原本符号。
[0073]
并串转换模块主要将并行信号转换成串行信号,具体实现可通过调用fpga内部fifo完成,设置fifo输入为并行信号,输出为串行信号即可实现。
[0074]
工作原理:模拟信号经过ad采样模块后转换为数字信号给fpga进行处理,接着nco模块分别产生一路正弦信号和一路余弦信号,此处将上方乘法器一路称为i路,下方乘法器
一路称为q路。i路信号与余弦波信号相乘,q路与正弦波信号相乘,接着i、q两路信号分别通过低通滤波器滤除高频分量,接着通过映射模块将四个象限映射为一个象限进行处理,接着使用cordic算法模块求出相角,通过划分区域将对应固定相角与求得相角相减求出相差,完成鉴相。再将相差通过二阶环路滤波器后作为nco模块的控制信号完成载波同步功能。之后抽样判决模块对信号进行抽样判决,通过逆映射模块恢复符号,最后通过并串转换模块恢复出原始信号。
[0075]
本发明实施方式的另一方面还提供一种用于相位调制同步解调的方法,包括以下步骤:
[0076]
(1)相位调制接收端接收来自发送端的信号,将信号输出两路;
[0077]
(2)将步骤(1)输出两路信号分别与nco产生的正弦波和余弦波相乘,得到两路信号;
[0078]
(3)将步骤(2)相乘后的两路数据通过低通滤波器;
[0079]
(4)对步骤(3)滤波后的两路数据进行映射;
[0080]
将两路数据分别视作坐标轴里的横坐标与纵坐标,根据原点对称原理,有以下规则:
[0081]
第一象限的横坐标与纵坐标不变;
[0082]
第二象限的横坐标取反赋给纵坐标,赋值之前的纵坐标赋给横坐标;
[0083]
第三象限的横坐标和纵坐标取反,横坐标赋给横坐标,纵坐标赋给纵坐标;
[0084]
第四象限的横坐标赋给纵坐标,赋值之前的纵坐标取反赋给横坐标。
[0085]
(5)将相位调制位于第一象限的星座点的角度量化成固定值存入寄存器,此处以16psk调制举例,其第一象限四个星座点的相角分别为11.25
°
、33.75
°
、56.25
°
和78.75
°
,根据自定义寄存器的位宽将这四个角度量化成固定值。
[0086]
(6)将星座点以原点为起点划分多个区域,以16psk调制为例,将其第一象限划分为四个区域,0
°
~22.5
°
为第一区域,22.5
°
~45
°
为第二区域,45
°
~67.5
°
为第三区域,67.5
°
~90
°
为第四区域,其中22.5
°
为11.25
°
与33.75
°
的平均值,45
°
为33.75
°
与56.25
°
的平均值,67.5
°
为56.25
°
与78.75
°
的平均值。
[0087]
(7)将步骤(6)所划分区域,将0
°
、22.5
°
、45
°
、67.5
°
、90
°
根据自定义寄存器的位宽将这五个角度根据所定义位宽量化成固定值。
[0088]
(8)使用cordic算法对步骤(4)所映射的横坐标与纵坐标求相角;
[0089]
(9)根据步骤(8)所得相角按照步骤(6)的划分,判断相角位于哪个区域;
[0090]
(10)根据步骤(9)判断的区域,将区域对应相角与步骤(8)所得相角相减,以16psk为例,前文所述第一区域对应角度为步骤(5)所提及的11.25
°
,第二区域对应角度为步骤(5)所提及的33.75
°
,第三区域对应角度为步骤(5)所提及的56.25
°
,第四区域对应角度为步骤(5)所提及的78.75
°
,如使用cordic算法求反正切得角度为30
°
,则判断当前点位于第二区域,将求得角度减去33.75
°
即为相差。
[0091]
(11)将步骤(10)所得相差通过二阶环路滤波器。
[0092]
(12)将步骤(11)环路滤波器输出值用来控制nco相位。
[0093]
(13)将步骤(3)滤除高频分量的信号进行抽样判决。
[0094]
(14)对步骤(13)抽样判决后的信号进行逆映射恢复出符号。
[0095]
(15)对步骤(14)恢复的符号进行并串转换恢复出基带信号。
[0096]
以上所述仅表达了本发明的优选实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形、改进及替代,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1