一种风电叶片自动追踪扫描探测系统与方法与流程
1.本发明涉及风电领域的检测设备与方法,具体是一种基于全视觉的风电叶片自动追踪扫描探测系统与方法。
背景技术:
2.风电叶片是风电机组中将自然界风能转换为风力发电机组中基础和关键部件。叶片的设计直接影响风能的转换效率,直接影响其年发电量。叶片性能优劣将直接影响整个发电机组系统能否可靠运行,也是衡量风电机组设计和技术水平的主要依据。
3.因叶片整体常年裸露在野外,工作条件恶劣,叶片损坏失效事故时有发生,甚至叶片完全断裂。当叶片发生损坏特别是断裂时,平衡旋转状态被破坏,发电机组瞬间剧烈振动、损害严重。叶片在运行中突然断裂,可能撞击相邻叶片或塔筒,甚至可能会导致整个机组倒塌的严重事故。叶片开裂严重并断裂,将直接导致风机机组被迫长时间停运,经济损失巨大。叶片的维修非常困难,需要托运到厂家去修理,维修的费用和维修的时间等成本都非常高。因此,加强叶片状态检测监测,及早发现叶片的潜在问题或事故的苗头,采取措施防患于未然,势在必行,也是整个风电行业的大势所趋。
4.目前,风电叶片缺陷检测主要采用人工巡检、通过望远镜目视观测的方法,效率低、周期长、检查不到位、检查结果可信度低等弊端,而且必须停机检查、耗时耗力,无法满足要求。国内外学者专家不断研究新的自动化叶片缺陷检测方法,可以分为离线静态检测方法和在线动态监测方法两大类。离线静态监测方法主要包括x射线法、超声波法、激光散斑法、无人机视觉法等,只能在风机停机状态下对静止叶片进行检测,维修周期长、经济损失大、社会影响不佳。在线动态检测方法主要包括光纤法、声发射法、红海外热成像法等,虽然都可以在风机不停机的条件下对运转的叶片缺陷进行检测,但是都存在可靠性差、约束条件多等各种不同的问题,而没有得到实际的广泛应用。
5.近年来,视觉法因其智能化程度高、探测结果可靠、系统构成相对简单、现场使用方便、扩展能力很强等卓越特点,成为未来发展的主要趋势之一。目前基于视觉的叶片检测方法大豆采样无人机搭载视觉设备对叶片进行检测,为了安全的考虑,叶片必须停机进行检测,因此属于离线镜头检测,不符合行业共发展需求。
6.但是,将视觉技术用于正常工作的叶片检测具有十分严峻的挑战:(1)叶片尺寸大:目前风电行业里叶片尺寸巨大而且差异巨大,叶片长度大约处在50m~100m的范围。如果直接采用全尺寸检测方式,则分辨率太低,无法识别危险缺陷与损伤。只能采用长焦镜头来获取很小的视场范围,以保障识别的灵敏度。此时镜头的景深仅为m级,而不同叶片位置的物距差异远远大于景深。因此,常规的固定焦点的方式无法在叶片全长范围内保障获得清晰的图像。
7.(2)叶片速度快:目前叶片转速大约每转2~3秒,对于直径100m~160m的叶片,末端线速度可达100m/s ~300m/s。为了识别mm级别的微小缺陷,快门打开时间应为ms级。由于快门时间缩短,导致曝光不足,会明显影响图像质量。
8.(3)目标不连续:在叶片旋转过程中,三支叶片分别依次快速进入相机的视场,并又迅速移出视场,而且视场中出现叶片的概率远远小于视场中没有叶片的概率(约1%)。因此,无法通过高清相机高速采集图像来捕获目标。
9.大连维德公司提出一种“视觉触发模块”,可将光信号转变为电信号,当图像出现已知规则变化时,则判断时间生成,无需经过集成电路分析,通过集成电路处理直接发出触发指令,进行图像采集。但是,这种方法存在明显的滞后(ms级),根本无法保障能够及时采集到叶片的图像。
10.国防科大提出一种长焦相机随动测量系统,长焦相机安装于随动云台之上,随动云台,随动云台受控于信息处理分析与控制系统,可随叶片不同局部区域而转动,长焦相机拍摄叶片局部高清图像。由于叶片转动速度快且并不稳定,因此这个电动随动云台根本无法快速而准确地追踪到高速转动的叶片。另一方面,风电现场环节条件恶劣(高低温、灰尘、湿度等),随动云台长时间高速机械转动是不可靠的,这种方法没有实际有效应用的可能性。
技术实现要素:
11.为了解决现有的风电叶片在线检测存在的问题,本发明提出一种基于全图像的风电叶片自动追踪扫描探测系统及方法,该探测系统采用三可变电动长焦镜头和千万像素级工业相机,安装于电控云台之上。首先,将镜头置于广角端,获取一组全域叶片图像序列,通过分析处理得到叶片的转动速度。然后,将镜头置于长焦端并对准叶片下边缘位置,以叶片转动周期作为图像采集周期,通过自适应调节算法控制图像采样时刻,实现对高速转动叶片的自动追踪,并获得叶片局部区域的高清图像。此后,调节云台俯仰角,上下扫描整个叶片长度区域,通过图像拼接技术获得整个叶片全长的完整高清图像。最后,通过识别算法探测叶片损伤缺陷。这种叶片自动追踪探测系统和方法的优势是响应迅速、鲁棒性好,适合叶片高速旋转的情形,而且智能化程度高、全自动完整成整个叶片的扫描探测,完全适应风电叶片不停机在线检测的需求。
12.本发明是通过以下技术方案实现的:本发明的风电叶片自动追踪扫描探测系统的特殊之处在于,所述的探测系统包括有光源、镜头、相机、滤光片、防护罩、云台、触摸屏、控制器、电源、机箱,其中:所述的光源为激光扩束照明光源,波长为可见光范围,便于观察;扩束角度应保证到达叶片位置的照明范围为叶片宽度的2倍左右;所述的镜头为三可变长焦镜头,倍数、焦点、光圈均可以电控调节;倍数调节用于不同距离目标的探测,广角端用于观测叶片全域范围、获取叶片转动速度,长焦端用于观测局部叶片、识别细小叶片损伤缺陷;焦点调节用于对叶片全长进行扫描探测时自动改变焦点位置,从而始终保证叶片局部图像始终清晰;光圈调节用于适应不同叶片表面、不同天气环境照度条件下的图像质量,实现全天候探测;所述的相机为千万像素工业级相机,以保证获得投影图像具有足够的清晰度、能够识别mm级叶片损伤缺陷;所述的相机采用千兆网接口输出图像数据,并于系统集成,保证抗干扰能力;所述的滤光片为窄带滤光片,其中心波长与激光器的波长一致,只允许激光器的
光线及其反射光线通过,滤除其他波长的光线,由此可由提高对环境光(特别是天空和太阳光)干扰的抑制能力,提高图像质量,保证探测灵敏度;所述的防护罩具有良好的防护能力,保证防水、防尘、防污能力;所述的防护罩具有电加热功能,可以适应高寒地区的低温气候条件;所述的云台为电控云台,左右转角和上下俯仰角可电动调节,左右转角调节用于对准叶片位置,上下俯仰调节用于对叶片全长进行扫描探测;所述的触摸屏为工业级电阻触摸屏,可以适应风电现场条件下的灰尘、雨水、油污等恶劣条件,保证可靠工作;所述的控制器为一体式无风扇工控机,负责控制云台转动、镜头调节、相机图像采集、数据处理等工作;所述的电源为可充电式锂电池组,可为整个探测系统提供电力;所述的电源采用统一的单一规格12vdc,可由汽车电源供电和充电,满足车载运输和操作的需求;所述的机箱为高防护等级工业机箱,可以防水、防雨、防尘、抗震,适应风电现场的探测需求;所述的机箱具有滚轮底脚,可以短距离移动,方便现场操作运输。
13.本发明的风电叶片自动追踪扫描探测系统的特殊之处还在于,所述的镜头的调节与所述的云台的调节均采用标准串行通讯接口进行控制,可由控制器进行自动控制云台的姿态与镜头的状态,以保证探测过程的自动化与智能化。
14.本发明的风电叶片自动追踪扫描探测系统的特殊之处还在于,所述的镜头在将变倍置于广角端时,应保证视场范围略大于叶片回转直径;相机连续采集若干幅叶片图像,通过计算图像中叶片的角度变化量与图像之间的时间差得到叶片旋转的速度。
15.本发明的风电叶片自动追踪扫描探测系统的特殊之处还在于,所述的镜头在将变倍置于长焦端时,应保证视场范围为叶片宽度的2倍左右;相机连续不断地采集图像,图像采集周期等于叶片转动周期;当视场中无叶片或只有部分叶片时,自动调节图像采样的时刻,使得叶片逐渐出现在视场之中,由此实现对高速转动叶片的自动追踪。
16.本发明提出一种基于上述探测系统的风电叶片转动速度探测方法,具体过程如下:(1)打开电源,调节云台的角度与俯仰,使得相机镜头对准叶片中心。
17.(2)控制镜头变倍至广角端,保证视场范围略大于叶片直径。
18.(3)控制相机,采用固定周期连续采集若干幅图像。
19.(4)控制器计算每一幅图像中某个或多个叶片的角度。
20.(5)控制器计算相邻两幅图像之间的叶片角度差,并除以图像采集周期,得出此时叶片转动速度。
21.(6)控制器将得到多个叶片速度取计算平均值,作为最终的叶片转定速度。
22.本发明提出一种基于上述探测系统的风电叶片自动追踪方法,具体过程如下:(1)打开电源,调节云台的角度与俯仰,使得相机镜头对准叶片的下端点。
23.(2)控制镜头变倍至长焦端,保证视场范围约为叶片宽度的2倍左右。
24.(3)采用叶片转动周期作为固定的图像采样周期,连续不断地采集图像。
25.(4)如果图像中没有叶片出现,则对下一次图像采集增加一定的延时,直至图像中出现叶片位置。
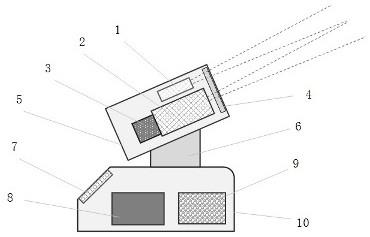
26.附图说明:图1是本发明的风电叶片自动追踪探测系统组成原理示意图。
27.图2是本发明的叶片转动速度探测原理示意图。
28.图3是本发明的叶片自动追踪原理示意图图中,1-光源,2-镜头,3-相机,4-滤光片,5-防护罩,6-云台,7-触摸屏,8-控制器,9-电源,10-机箱。
29.具体实施方式:下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
30.本发明的风电叶片自动追踪扫描探测系统的组成如图1所示,探测系统的特殊之处在于,所述的探测系统包括有光源1、镜头2、相机3、滤光片4、防护罩5、云台6、触摸屏7、控制器8、电源9、机箱10,其中:所述的光源1为激光扩束照明光源,波长为可见光范围,例如红光650nm,便于观察;扩束角度应保证到达叶片位置的照明范围为叶片宽度的2倍左右,例如探测系统距离风机的距离为80m,风机中心高度80m,叶片宽度为2m,则光源1的扩束角度约为2
°
左右;所述的镜头2为三可变长焦镜头,其倍数、焦点、光圈均可以电控调节;倍数调节用于不同距离目标的探测,广角端用于观测叶片全域范围、获取叶片转动速度(例如叶片直径120m,1/2
″
镜头所需焦距约为8mm),长焦端用于观测局部叶片、识别细小叶片损伤缺陷(例如视场范围为4m,1/2
″
镜头所需焦距约为240mm);焦点调节用于对叶片全长进行扫描探测时自动改变焦点位置,从而始终保证叶片局部图像始终清晰(例如叶片长度60m,镜头所需焦点范围约为82m-110mm左右);光圈调节用于适应不同叶片表面、不同天气环境照度条件下的图像质量,实现全天候探测;所述的相机3为千万像素工业级相机,以保证获得投影图像具有足够的清晰度、能够识别mm级叶片损伤缺陷;假设视场范围为4m,相机水平像素为4000pixel,则单个像素对应尺寸约为1mm;所述的相机3采用千兆网接口输出图像数据,并于系统集成,保证抗干扰能力;所述的滤光片4为窄带滤光片,其中心波长与激光器1的波长一致,只允许激光器1的光线及其反射光线通过,滤除其他波长的光线,由此可由提高对环境光(特别是天空和太阳光)干扰的抑制能力,提高图像质量,保证探测灵敏度;例如上述激光器1,中心波长650nm,滤光片4的贷款可为50nm左右;所述的防护罩5具有良好的防护能力,保证防水、防尘、防污能力;所述的防护罩5具有电加热功能,可以适应高寒地区的低温气候条件;所述的云台6为电控云台,左右转角和上下俯仰角可电动调节,左右转角调节用于对准叶片位置,上下俯仰调节用于对叶片全长进行扫描探测;所述的触摸屏7为工业级电阻触摸屏,可以适应风电现场条件下的灰尘、雨水、油污等恶劣条件,保证可靠工作;所述的控制器8为一体式无风扇工控机,负责控制云台6的转动、镜头2的调节、相机3的图像采集、数据处理等工作;
所述的电源9为可充电式锂电池组,可为整个探测系统提供电力;所述的电源9采用统一的单一规格12vdc,可由汽车电源供电和充电,满足车载运输和操作的需求;所述的机箱10为高防护等级工业机箱,可以防水、防雨、防尘、抗震,适应风电现场的探测需求;所述的机箱10具有滚轮底脚,可以短距离移动,方便现场操作运输。
31.本发明的风电叶片自动追踪扫描探测系统的特殊之处还在于,所述的镜头2的调节与所述的云台6的调节均采用标准串行通讯接口进行控制,可由控制器8进行自动控制云台6的姿态与镜头2的状态,以保证探测过程的自动化与智能化。例如,可以采样rs-485串行总线。
32.本发明的风电叶片自动追踪扫描探测系统的特殊之处还在于,所述的镜头2在将变倍置于广角端时,应保证视场范围略大于叶片回转直径;如图2所示,例如叶片直径约100m,则视场范围可取为120m左右;相机3连续采集若干幅叶片图像,通过计算图像中叶片的角度变化量与图像之间的时间差得到叶片旋转的速度;例如图2中两幅相邻图像中叶片的角度分别为θ1和θ2,两幅图像对应的采样时刻分别为t1和t2,则叶片转动速度为 v = (θ1-θ2)/( t1-t2)。
33.本发明的风电叶片自动追踪扫描探测系统的特殊之处还在于,所述的镜头2在将变倍置于长焦端时,应保证视场范围为叶片宽度的2倍左右;例如叶片宽度为2m,则视场可选为4m左右;相机3连续不断地采集图像,图像采集周期等于叶片转动周期;此时,采集的图像将会有三种情形,即无叶片、部分叶片、完整叶片;当视场中无叶片或只有部分叶片时,自动调节图像采样的时刻(延后或者超前),使得叶片逐渐出现在视场之中,由此实现对高速转动叶片的自动追踪。
34.本发明提出一种基于上述探测系统的风电叶片转动速度探测方法,具体过程如下:(1)打开电源9,调节云台6的角度与俯仰,使得相机3和镜头2对准叶片中心;(2)控制镜头2变倍至广角端,保证视场范围略大于叶片直径;(3)控制相机3,采用固定周期连续采集若干幅图像;(4)控制器8计算每一幅图像中某个或多个叶片的角度,例如图2中的θ1、θ2、
…
、θn;(5)控制器8计算相邻两幅图像之间的叶片角度差,并除以图像采集周期,得出此时叶片转动速度v1、v2、
…
、vn;(6)将得到多个叶片速度取计算平均值,作为最终的叶片转定速度,即 v = (v1+v2+
…
+vn)/n。
35.本发明提出一种基于上述探测系统的风电叶片自动追踪方法,具体过程如下:(1)打开电源9,调节云台6的角度与俯仰,使得相机3和镜头2对准叶片的下端点;(2)控制镜头2变倍至长焦端,保证视场范围约为叶片宽度的2倍左右;(3)控制器8采用叶片转动周期作为固定的图像采样周期,连续不断地采集图像;(4)如果图像中没有叶片出现,则对下一次图像采集增加一定的延时,直至图像中出现叶片位置;本发明的探测系统与方法可以在叶片不停机的状态下实现叶片损伤缺陷的在线高速追踪扫描探测,具有高智能化、高自动化的优势,同样可以适用于其他高速运动目标的
快速定位与探测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1