一种双向窃听信道中无人机辅助协作干扰安全通信
1.本发明涉及安全通信技术领域,具体为一种双向窃听信道中无人机辅助协作干扰安全通信。
背景技术:
2.通信安全不同于信息安全,它是建立在信号层面的安全,不涉及具体的数据信息内容,通信安全是信息安全的基础,为信息的正确,可靠传输提供了物理保障,无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,无人机实际上是无人驾驶飞行器的统称,从技术角度定义可以分为:无人直升机、无人固定翼机、无人多旋翼飞行器、无人飞艇、无人伞翼机这几大类。
3.现有信道中信息安全存在很大的隐患,存在被双向窃听的风险,对于传输的信息安全不能进行很好的保障和保护,导致较多的重要信息出现泄露的问题。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种双向窃听信道中无人机辅助协作干扰安全通信,解决了存在被双向窃听的风险,对于传输的信息安全不能进行很好的保障和保护,导致较多的重要信息出现泄露的问题。
5.为实现以上目的,本发明通过以下技术方案予以实现:一种双向窃听信道中无人机辅助协作干扰安全通信,包括通信双方alice和bob、窃听者eve和发送干扰信号的无人机,所述地面用户位置已知,分别为wa=[xa,ya]
t
、wb=[xb,yb]
t
和we=[xe,ye]
t
,无人机固定飞行高度为h,为了便于分析,将无人机飞行时间分成n个时隙,每个时隙为δ,即t=nδ,令ν={1,2,
…
,n}表示离散时隙的集合,设置无人机水平坐标为q[n]=[x[n],y[n]]
t
,且满足以下约束:
[0006]
||q[n+1]-q[n]||2≤s2,n=1,2,
…
,n
ꢀꢀ
(1a)
[0007]
||q[1]-q[0]||2≤s2,q[n]=qfꢀꢀ
(1b)
[0008]
设置无人机初始位置和最终位置为(x[0],y[0],h)和(x[n],y[n],h),且采用视距通信,因此,alice、bob和eve与无人机的信道增益可以被表示为:
[0009][0010][0011][0012]
令pa[n],pb[n]表示在时隙n时,alice,bob的平均功率,pu[n]表示无人机的干扰功率,则alice、bob和无人机发送干扰的功率约束表示如下:
[0013][0014][0015][0016]
因此,alice与bob的平均可达通信速率可表示为:
[0017][0018]
采用双向信道,则整个通信系统的合法用户可达通信速率可表示为:
[0019][0020]
则窃听用户eve的可达通信速率可表示为:
[0021][0022]
因此,通信系统的安全容量可表示为:
[0023][0024]
其中,[x]
+
=max(x,0),设置在第n各时隙中,无人机飞行轨迹为q={q[n],n∈n},用户功率为pa={pa[n],n∈n},pb={pb[n],n∈n},pu={pu[n],n∈n}。
[0025]
因此,此优化问题可以被表示为(p1):
[0026][0027]
由于(p1)的非凸性和约束的离散限制,难以解决,因此为简化此问题,rd[n]和re[n]分别被其上界与下界替代,即
[0028][0029]
[0030][0031]
其中
[0032]
因此(p1)可被简化为(p2),
[0033][0034]
优选的,所述式(1a)和式(1b)中,s=vδ,v是无人机最大速率,因为δ足够小,因此在每个时隙中无人机可以视为静止的。
[0035]
优选的,所述式(2a)、(2b)和式(2c)中,alice与bob之间的信道可以被视为独立的瑞利衰落,且信道增益可以表示为同理,alice与eve和bob与eve之间的可以表示为和ρ0表示在参考距离为d=1m时的无线信道功率增益,为路径衰落指数,ξ
ab
和ξ
ab
都是单位期望的独立指数分布随机变量。
[0036]
优选的,所述式(3a)、(3b)和式(3c)中,c)中,
[0037]
优选的,所述式(6)中,xn=x
ngab
,yn=y
ngab
,,
[0038]
优选的,所述子问题1:pa优化,当给定pb、pu和q时,(p2)可以被表示为(p3):
[0039][0040]
其中,其中,
[0041]
尽管(p3)时非凸的,它的最优解可以被表示为:
[0042]
[0043]
其中,
[0044]
μ1是一个保证的非负值,可以通过二分法找到。
[0045]
优选的,所述子问题2:pb优化,采用的双向信道,因此对于bob的功率优化与alice相同,即(p2)可以被表示为(p4):
[0046][0047]
其中,其中,
[0048]
可以利用子问题1中的公式寻找。
[0049]
优选的,所述子问题3:pu优化,令优化,令优化,令
[0050]
给定传输功率pa,pb和飞行轨迹q时,(p2)可以被描述为(p5):
[0051][0052]
令作为第k此迭代的无人机干扰功率,因为式(14)式关于pu[n]的凸函数,则
[0053][0054]
[0055]
其中,其中,其中,
[0056]
综上所述,(p5)可以被近似为(p6):
[0057][0058]
优选的,所述子问题4:无人机轨迹q优化,对给定传输功率pa,pb,pu,通过引入l1={l1(n)=||q[n]-wa||+h2,n∈n},l2={l2(n)=||q[n]-wb||+h2,n∈n}和m={m(n)=||q[n]-we||+h2,n∈n},(p2)可以被描述为(p7):
[0059][0060]
从上述式子中可以发现约束(20b)、(20c)和(20d)取等式时,(p7)可以获得最优解,利用sco定理将-||q[n]-wa||2和-||q[n]-wb||2转化成为他们各自的凸上界,qk={q[n],n∈n}为第k此迭代时给定的初始轨迹,则我们可以得:
[0061]
[0062][0063][0064][0065]
其中,
[0066][0067]
mk[n]=||qk[n]-we||2,,,
[0068]
将(21)、(22)代入(p7),则(p8)可以表示为:
[0069][0070]
需要特别注意的是,(p8)已经被转化为了一个凸问题,因此他可以被凸优化工具箱有效解决,同样,(21)与(22)中采用的上界确保(p8)得到的解是(p7)的子集,综上,给定qk时,通过(p8)得出的解,可以得出(p7)的次优解。
[0071]
有益效果
[0072]
本发明提供了一种双向窃听信道中无人机辅助协作干扰安全通信。与现有技术相比具备以下有益效果:该双向窃听信道中无人机辅助协作干扰安全通信,地面用户位置已知,分别为wa=[xa,ya]
t
、wb=[xb,yb]
t
和we=[xe,ye]
t
,无人机固定飞行高度为h,为了便于分析,将无人机飞行时间分成n个时隙,每个时隙为δ,即t=nδ,令ν={1,2,
…
,n}表示离散时隙的集合,设置无人机水平坐标为q[n]=[x[n],y[n]]
t
,通过联合优化双向信道中通信双方的发送功率、无人机的干扰功率和飞行轨迹最大化通信系统的安全容量,提出了无人机
协作干扰辅助安全通信系统下的功率分配和飞行轨迹优化方案,分析得出了在平均传输功率和最大传输功率约束下无人机飞行过程中可达安全速率的下界,因此利用块坐标下降法和连续凸优化提出了一种有效地次优化算法,将此非凸问题转换为凸问题,有效提升通信系统的通信安全,联合优化合法用户功率、无人机干扰功率和飞行轨迹以防止窃听者窃听有用信息,提高通信系统安全性能,同时,飞行时间足够长来确保无人机可以飞到离窃听者更近的位置来施加更强的干扰。
附图说明
[0073]
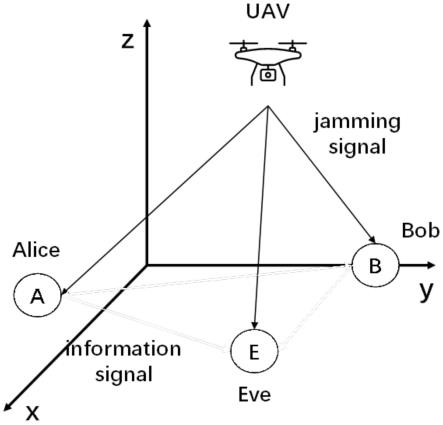
图1为本发明无人机辅助干扰双向窃听信道模型图。
具体实施方式
[0074]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0075]
请参阅图1,本发明提供一种技术方案:一种双向窃听信道中无人机辅助协作干扰安全通信,包括通信双方alice和bob、窃听者eve和发送干扰信号的无人机,所述地面用户位置已知,分别为wa=[xa,ya]
t
、wb=[xb,yb]
t
和we=[xe,ye]
t
,无人机固定飞行高度为h,为了便于分析,将无人机飞行时间分成n个时隙,每个时隙为δ,即t=nδ,令ν={1,2,
…
,n}表示离散时隙的集合,设置无人机水平坐标为q[n]=[x[n],y[n]]
t
,且满足以下约束:
[0076]
||q[n+1]-q[n]||2≤s2,n=1,2,
…
,n
ꢀꢀ
(1a)
[0077]
||q[1]-q[0]||2≤s2,q[n]=qfꢀꢀ
(1b)
[0078]
设置无人机初始位置和最终位置为(x[0],y[0],h)和(x[n],y[n],h),且采用视距通信,因此,alice、bob和eve与无人机的信道增益可以被表示为:
[0079][0080][0081][0082]
令pa[n],pb[n]表示在时隙n时,alice,bob的平均功率,pu[n]表示无人机的干扰功率,则alice、bob和无人机发送干扰的功率约束表示如下:
[0083][0084][0085][0086]
因此,alice与bob的平均可达通信速率可表示为:
[0087][0088]
采用双向信道,则整个通信系统的合法用户可达通信速率可表示为:
[0089][0090]
则窃听用户eve的可达通信速率可表示为:
[0091][0092]
因此,通信系统的安全容量可表示为:
[0093][0094]
其中,[x]
+
=max(x,0),设置在第n各时隙中,无人机飞行轨迹为q={q[n],n∈n},用户功率为pa={pa[n],n∈n},pb={pb[n],n∈n},pu={pu[n],n∈n}。
[0095]
因此,此优化问题可以被表示为(p1):
[0096][0097]
由于(p1)的非凸性和约束的离散限制,难以解决,因此为简化此问题,rd[n]和re[n]分别被其上界与下界替代,即
[0098][0099][0100][0101]
其中
[0102]
因此(p1)可被简化为(p2),
[0103][0104]
本发明中,式(1a)和式(1b)中,s=vδ,v是无人机最大速率,因为δ足够小,因此在每个时隙中无人机可以视为静止的。
[0105]
本发明中,式(2a)、(2b)和式(2c)中,alice与bob之间的信道可以被视为独立的瑞利衰落,且信道增益可以表示为同理,alice与eve和bob与eve之间的可以表示为和ρ0表示在参考距离为d=1m时的无线信道功率增益,为路径衰落指数,ξ
ab
和ξ
ab
都是单位期望的独立指数分布随机变量。
[0106]
本发明中,式(3a)、(3b)和式(3c)中,
[0107]
本发明中,式(6)中,xn=x
ngab
,yn=y
ngab
,,
[0108]
本发明中,子问题1:pa优化,当给定pb、pu和q时,(p2)可以被表示为(p3):
[0109][0110]
其中,其中,
[0111]
尽管(p3)时非凸的,它的最优解可以被表示为:
[0112][0113]
其中,
[0114]
μ1是一个保证的非负值,可以通过二分法找到。
[0115]
本发明中,子问题2:pb优化,采用的双向信道,因此对于bob的功率优化与alice相同,即(p2)可以被表示为(p4):
[0116][0117]
其中,其中,
[0118]
可以利用子问题1中的公式寻找。
[0119]
本发明中,子问题3:pu优化,令优化,令优化,令
[0120]
给定传输功率pa,pb和飞行轨迹q时,(p2)可以被描述为(p5):
[0121][0122]
令作为第k此迭代的无人机干扰功率,因为式(14)式关于pu[n]的凸函数,则
[0123][0124][0125]
其中,其中,其中,
[0126]
综上所述,(p5)可以被近似为(p6):
[0127][0128]
本发明中,子问题4:无人机轨迹q优化,对给定传输功率pa,pb,pu,通过引入l1={l1(n)=||q[n]-wa||+h2,n∈n},l2={l2(n)=||q[n]-wb||+h2,n∈n}和m={m(n)=||q[n]-we||+h2,n∈n},(p2)可以被描述为(p7):
[0129][0130]
从上述式子中可以发现约束(20b)、(20c)和(20d)取等式时,(p7)可以获得最优解,利用sco定理将-||q[n]-wa||2和-||q[n]-wb||2转化成为他们各自的凸上界,qk={q[n],n∈n}为第k此迭代时给定的初始轨迹,则我们可以得:
[0131][0132][0133][0134]
[0135]
其中,
[0136][0137]
mk[n]=||qk[n]-we||2,,,
[0138]
将(21)、(22)代入(p7),则(p8)可以表示为:
[0139][0140]
需要特别注意的是,(p8)已经被转化为了一个凸问题,因此他可以被凸优化工具箱有效解决,同样,(21)与(22)中采用的上界确保(p8)得到的解是(p7)的子集,综上,给定qk时,通过(p8)得出的解,可以得出(p7)的次优解。
[0141]
同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
[0142]
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0143]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1