隧道定位方法、装置、系统及存储介质与流程
本技术涉及无线通讯,尤其涉及一种隧道定位方法、装置、系统及存储介质。
背景技术:
1、随着交通运输业的飞速发展,隧道在人们的日常生活中越来越常见,如地铁、高铁、火车等交通工具在行驶过程中常常需要经过隧道。目前隧道内部署的通讯基站系统能够为隧道提供无线通讯信号的覆盖,但不能够提供隧道定位功能。现有技术中虽然可以采用蓝牙系统和超宽带(ultrawide band,简称为uwb)系统来实现隧道内设备的定位功能,但采用该方式实现的硬件成本较高,且施工难度较大。因此,如何提供一种硬件成本较低,且施工难度较小的隧道定位方法,成为亟待解决的技术问题。
技术实现思路
1、本技术提供了一种隧道定位方法、装置、系统及存储介质,以解决现有技术中实现隧道定位功能所需的硬件成本较高,且施工难度较大的问题。
2、第一方面,本技术提供了一种隧道定位方法,所述方法包括:
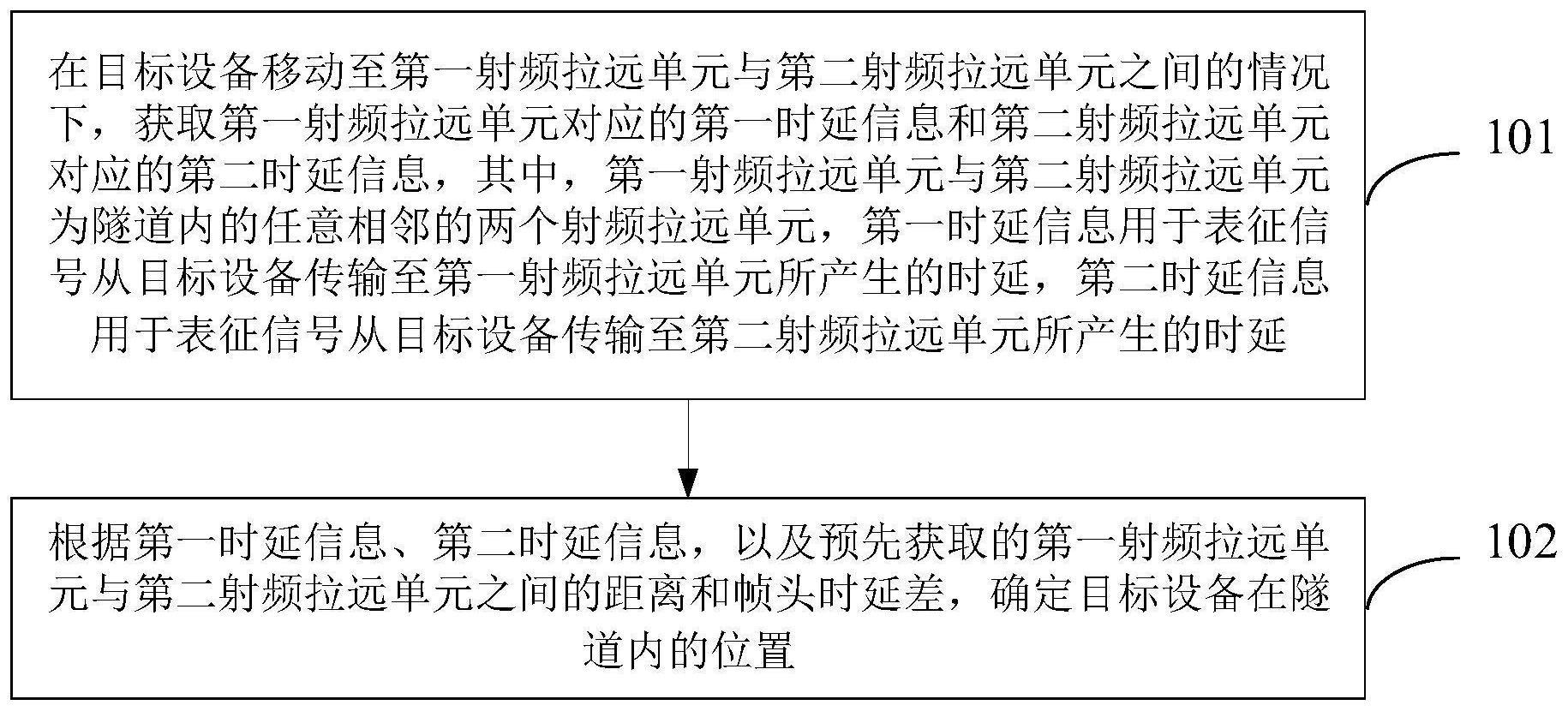
3、在目标设备移动至第一射频拉远单元与第二射频拉远单元之间的情况下,获取所述第一射频拉远单元对应的第一时延信息和所述第二射频拉远单元对应的第二时延信息,其中,所述第一射频拉远单元与所述第二射频拉远单元为隧道内的任意相邻的两个射频拉远单元,所述第一时延信息用于表征信号从所述目标设备传输至所述第一射频拉远单元所产生的时延,所述第二时延信息用于表征信号从所述目标设备传输至所述第二射频拉远单元所产生的时延;
4、根据所述第一时延信息、所述第二时延信息,以及预先获取的所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差,确定所述目标设备在所述隧道内的位置。
5、可选地,所述根据所述第一时延信息、所述第二时延信息,以及预先获取的所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差,确定所述目标设备在所述隧道内的位置,包括:
6、根据所述第一时延信息、所述第二时延信息,以及预先获取的所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差,分别计算所述目标设备至所述第一射频拉远单元的第一距离和所述目标设备至所述第二射频拉远单元的第二距离;
7、根据所述第一距离和所述第二距离,确定所述目标设备在所述隧道内的位置。
8、可选地,采用如下公式计算所述第一距离和所述第二距离:
9、
10、其中,l1b表示所述第一距离,l2b表示所述第二距离,l12表示所述第一射频拉远单元与所述第二射频拉远单元之间的距离,ck表示光在介质电缆的传输速度,dif21表示所述第一射频拉远单元与所述第二射频拉远单元之间的帧头时延差,表示所述第一时延信息,表示所述第二时延信息。
11、可选地,在所述根据所述第一时延信息、所述第二时延信息,以及预先获取的所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差,分别计算所述目标设备至所述第一射频拉远单元的第一距离和所述目标设备至所述第二射频拉远单元的第二距离之前,所述方法还包括:
12、在测试设备移动至第一位置的情况下,获取所述第一射频拉远单元对应的第三时延信息和所述第二射频拉远单元对应的第四时延信息,其中,所述第一位置为位于所述第一射频拉远单元的远离所述第二射频拉远单元一侧的位置,所述第三时延信息用于表征信号从所述目标设备传输至所述第一射频拉远单元所产生的时延,所述第四时延信息用于表征信号从所述目标设备传输至所述第二射频拉远单元所产生的时延;
13、在所述测试设备移动至第二位置的情况下,获取所述第一射频拉远单元对应的第五时延信息和所述第二射频拉远单元对应的第六时延信息,其中,所述第二位置为位于所述第二射频拉远单元的远离所述第一射频拉远单元一侧的位置,所述第五时延信息用于表征信号从所述目标设备传输至所述第一射频拉远单元所产生的时延,所述第六时延信息用于表征信号从所述目标设备传输至所述第二射频拉远单元所产生的时延;
14、根据所述第三时延信息、所述第四时延信息、所述第五时延信息和所述第六时延信息,计算得到所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差。
15、可选地,采用如下公式计算得到所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差:
16、
17、其中,l12表示所述第一射频拉远单元与所述第二射频拉远单元之间的距离,dif21表示所述第一射频拉远单元与所述第二射频拉远单元之间的帧头时延差,表示所述第三时延信息,表示所述第四时延信息、表示所述第五时延信息和表示所述第六时延信息,ck表示光在介质电缆的传输速度。
18、可选地,采用如下公式确定所述目标设备的位置:
19、
20、其中,xposb表示所述目标设备在预设坐标系中的横坐标,yposb表示所述目标设备在预设坐标系中的纵坐标,xrru1表示所述第一射频拉远单元在预设坐标系中的横坐标,yrru1表示所述第一射频拉远单元在预设坐标系中的纵坐标,xrru2表示所述第二射频拉远单元在预设坐标系中的横坐标,yrru2表示所述第二射频拉远单元在预设坐标系中的纵坐标,l12表示所述第一射频拉远单元与所述第二射频拉远单元之间的距离,l1b表示所述第一距离,l2b表示所述第二距离。
21、可选地,所述获取所述第一射频拉远单元对应的第一时延信息和所述第二射频拉远单元对应的第二时延信息,包括:
22、获取所述第一射频拉远单元和所述第二射频拉远单元接收到的来自所述目标设备在同一时刻发送的定位信号,其中,所述第一射频拉远单元和所述第二射频拉远单元之间设置有至少一个漏缆口,所述定位信号通过不同所述漏缆口至所述第一射频拉远单元的时延不同,且所述定位信号通过不同所述漏缆口至所述第二射频拉远单元的时延不同;
23、根据所述定位信号的信号强度,选取出所述第一射频拉远单元接收到的信号强度最大的定位信号所对应的时延作为所述第一时延信息,并选取所述第二射频拉远单元接收到的信号强度最大的定位信号所对应的时延作为所述第二时延信息。
24、第二方面,本技术还提供了一种隧道内设备的定位装置,所述装置包括:
25、获取模块,用于在目标设备移动至第一射频拉远单元与第二射频拉远单元之间的情况下,获取所述第一射频拉远单元对应的第一时延信息和所述第二射频拉远单元对应的第二时延信息,其中,所述第一射频拉远单元与所述第二射频拉远单元为隧道内的任意相邻的两个射频拉远单元,所述第一时延信息用于表征信号从所述目标设备传输至所述第一射频拉远单元所产生的时延,所述第二时延信息用于表征信号从所述目标设备传输至所述第二射频拉远单元所产生的时延;
26、确定模块,用于根据所述第一时延信息、所述第二时延信息,以及预先获取的所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差,确定所述目标设备在所述隧道内的位置。
27、第三方面,本技术还提供了一种隧道定位系统,包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
28、存储器,用于存放计算机程序;
29、处理器,用于执行存储器上所存放的程序时,实现第一方面任一项实施例所述的隧道定位方法的步骤。
30、第四方面,本技术还提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现第一方面任一项实施例所述的隧道定位方法的步骤。
31、在本技术实施例中,通过在目标设备移动至第一射频拉远单元与第二射频拉远单元之间的情况下,获取所述第一射频拉远单元对应的第一时延信息和所述第二射频拉远单元对应的第二时延信息,其中,所述第一射频拉远单元与所述第二射频拉远单元为隧道内的任意相邻的两个射频拉远单元,所述第一时延信息用于表征信号从所述目标设备传输至所述第一射频拉远单元所产生的时延,所述第二时延信息用于表征信号从所述目标设备传输至所述第二射频拉远单元所产生的时延;根据所述第一时延信息、所述第二时延信息,以及预先获取的所述第一射频拉远单元与所述第二射频拉远单元之间的距离和帧头时延差,确定所述目标设备在所述隧道内的位置。通过这种方式,可以根据目标设备所处位置附近的第一射频拉远单元所产生的第一时延信息和第二射频拉远单元所产生的第二时延信息,确定出目标设备在隧道中的位置,以实现隧道定位功能,而无需在隧道内部署蓝牙系统和超宽带系统来实现,从而降低了隧道定位的硬件成本和施工难度。
- 还没有人留言评论。精彩留言会获得点赞!