基于无人机的外场基站天线方向图和射频测试系统和方法与流程
1.本公开涉及无线通信技术领域,具体涉及一种基于无人机的外场基站天线方向图和射频测试系统和方法。
背景技术:
2.随着电子信息技术的迅猛发展,无人机技术正在逐步推进和快速发展。得益于无人机自身所具有的小体积、高灵活性、低成本的等特点,使得它被广泛地应用于农业、地质、气象、电力等行业,逐步进入大众视野,在各行业保持着较高的热度。由此,将无人机应用到基站天线测试,已成为国内外研究人员新的研究方向。基站天线测试的理想场地是微波暗室,但该场地将通信基站的测试场地局限在室内,对于大量已经部署在外场环境的通信基站,要获取这些基站天线的实际性能指标,需要在外场环境中对其进行检测。因此提出一种基于无人机的外场基站天线方向图和射频测试系统,可对基站天线方向图和典型射频指标进行外场测试。
技术实现要素:
3.本公开实施例提供一种基于无人机的外场基站天线方向图和射频测试系统。
4.第一方面,本公开实施例中提供了一种基于无人机的外场基站天线方向图和射频测试系统,包括:地面站系统、无人机、无人机搭载的数据采集系统和无人机搭载的数据传输系统;其中,所述地面站系统包括全站仪、定位模块和地面控制计算机;所述定位模块用于测量所述定位模块的位置信息,并将所述定位模块的位置信息传送给全站仪;
5.所述全站仪瞄准待测基站后,基于所述定位模块的位置信息解算出所述待测基站的位置信息,并将所述待测基站的位置信息传送至地面控制计算机;
6.所述地面控制计算机基于所述待测基站的位置信息生成无人机航迹规划指令,并将所述无人机航迹规划指令上传至无人机,以指示所述无人机按照所述无人机航迹规划指令绕所述待测基站飞行;
7.所述数据采集系统包括无人机飞控设备、信号接收天线、信号采集设备和天空控制计算机;其中,所述无人机飞控设备在所述无人机飞行时实时获取无人机的位置信息;
8.所述信号接收天线在所述无人机绕所述待测基站飞行过程中,接收待测基站天线发出的信号;
9.所述信号采集设备用于测量所述信号接收天线接收到的天线信号的强度,得到测量数据,并将所述测量数据传送至所述天空控制计算机;
10.所述天空控制计算机存储所述测量数据,并将所述测量数据通过所述数据传输系统回传至所述地面站系统。
11.第二方面,本发明实施例中提供了一种基于无人机的外场基站天线方向图和射频测试方法,其特征在于,所述方法在第一方面所述的基于无人机的外场基站天线方向图和射频测试系统上执行,包括:
12.利用全站仪测量待测基站天线的位置信息;
13.地面控制计算机基于待测基站天线的位置信息规划无人机的飞行航线,并通过数据传输系统将所规划的无人机航线发送给无人机;
14.无人机在地面控制计算机的控制下起飞,并按照所述无人机航线环绕所述待测基站天线飞行;
15.无人机环绕所述待测基站天线飞行时,利用数据采集系统获取对应空间位置的功率信息,天空控制计算机利用数据传输系统将获取的功率信息及对应的无人机的空间位置回传至地面控制计算机。
16.本公开实施例提供的技术方案可以包括以下有益效果:
17.本公开实施例主要针对在实际使用过程中的外场基站天线方向图和典型射频指标进行测试,适用于基站天线外场测试,同样适用于其他类型天线的外场测试场景。该系统可方便、快速、低成本地对基站天线开展外场测试,获取基站天线方向图、trp、evm等天线和射频指标。
18.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
19.结合附图,通过以下非限制性实施方式的详细描述,本公开的其它特征、目的和优点将变得更加明显。在附图中:
20.图1示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试系统的结构框图;
21.图2示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试的结构布局示意图;
22.图3示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试方法的一种实现流程图;
23.图4示出根据本公开一实施方式的无人机系统的外观示意图。
24.图5示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试方法的完整流程示意图。
具体实施方式
25.下文中,将参考附图详细描述本公开的示例性实施方式,以使本领域技术人员可容易地实现它们。此外,为了清楚起见,在附图中省略了与描述示例性实施方式无关的部分。
26.在本公开中,应理解,诸如“包括”或“具有”等的术语旨在指示本说明书中所公开的特征、数字、步骤、行为、部件、部分或其组合的存在,并且不排除一个或多个其他特征、数字、步骤、行为、部件、部分或其组合存在或被添加的可能性。
27.另外还需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本公开。
28.本公开提出了一种基于无人机的外场基站天线方向图和射频测试系统,包括无人
机、无人机搭载的数据采集系统、无人机搭载的数据传输系统、地面站系统。所述地面站系统包括全站仪、定位模块和地面控制计算机;所述定位模块用于测量所述定位模块的位置信息,并将所述定位模块的位置信息传送给全站仪;
29.所述全站仪瞄准待测基站后,基于所述定位模块的位置信息解算出所述待测基站的位置信息,并将所述待测基站的位置信息传送至地面控制计算机;
30.所述地面控制计算机基于所述待测基站的位置信息生成无人机航迹规划指令,并将所述无人机航迹规划指令上传至无人机,以指示所述无人机按照所述无人机航迹规划指令绕所述待测基站飞行;
31.所述数据采集系统包括无人机飞控设备、信号接收天线信号采集设备和天空控制计算机;其中,所述无人机飞控设备在所述无人机飞行时实时获取无人机的位置信息;
32.所述信号接收天线在所述无人机绕所述待测基站飞行过程中,接收所述待测基站天线信号;
33.所述信号采集设备用于测量所述信号接收天线接收到的天线信号的强度,得到测量数据,并将所述测量数据传送至所述天空控制计算机;
34.所述天空控制计算机存储所述测量数据,并将所述测量数据通过所述数据传输系统回传至所述地面站系统。
35.该系统主要针对在实际使用过程中的外场基站天线方向图和典型射频指标进行测试,具体可以测试基站天线方向图、trp、evm等天线和射频指标。测试过程为无人机搭载数据采集系统与数据传输系统,按照设定航线以待测基站为中心进行绕飞。在绕飞过程中,数据采集系统获取无人机所处空间位置的功率数据。数据采集系统通过数据传输系统将功率数据回传至地面站系统。本公开适用于基站天线外场测试,同样适用于其他类型天线的外场测试场景。该系统可方便、快速、低成本地对基站天线开展外场测试,获取基站天线方向图、trp、evm等天线和射频指标。
36.在一些实施例中,数据采集系统包括无人机飞控设备、光学云台、信号接收天线、同轴开关矩阵、信号采集设备、天空控制计算机;数据传输系统包括地面数据透传模块和天空数据透传模块;地面站系统包括全站仪、定位模块和地面控制计算机。本公开提出基于无人机的外场基站天线测试解决方案,相比于微波暗室,测试成本低,部署便捷。
37.本公开采用宽频带双极化天线作为机载的信号接收天线,可对工作在不同频段的基站天线进行测量。
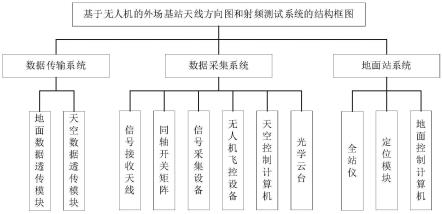
38.图1示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试系统的结构框图。如图1所示,该基于无人机的外场基站天线方向图和射频测试系统包括:无人机、无人机搭载的数据采集系统、无人机搭载的数据传输系统、和地面站系统;
39.所述数据采集系统包括无人机飞控设备、光学云台、信号接收天线、同轴开关矩阵、信号采集设备、天空控制计算机;其中,该无人机飞控设备获取无人机的当前位置信息,当前位置信息包括无人机当前的经度、纬度和高度gps坐标,并在串口上持续不断刷新此坐标。光学云台连接所述无人机飞控设备上的串口,获取无人机的当前位置信息,并基于当前位置信息中的gps坐标解算出信号接收天线的位置信息,此位置信息中包含信号接收天线相对于待测基站的俯仰角与方位角。信号接收天线装载于光学云台正下方,信号接收天线和光学云台以杆状碳纤维架为支撑结构,二者同时探出机身。
40.光学云台内置控制器与转向舵机,可在俯仰、方位方向调整指向角度,信号接收天线方位角与俯仰角受控于光学云台,始终指向无人机的机头方向。
41.同轴开关矩阵是信号接收天线与信号采集设备的中间连接结构,具有选通信号的作用,用于选通信号接收天线的一个极化接收到的信号至信号采集设备。
42.同轴开关矩阵、信号接收天线与信号采集设备三者以射频电缆连接,信号采集设备位于链路末端,测量信号接收天线的选通极化接收到信号的功率,该功率数据与接收天线的位置信息一一对应,用于描述基站天线在所述无人机绕飞球面上的功率分布。信号采集设备的测量数据被天空控制计算机采集并存储,并通过数据传输系统回传至地面站系统;
43.数据传输系统包括地面数据透传模块和天空数据透传模块。实现数据采集系统中的天空控制计算机与地面站系统的地面控制计算机二者之间的通信;
44.地面站系统包括全站仪、定位模块和地面控制计算机。定位模块功能是测量定位模块所在的位置,包括经度、纬度、高度gps坐标,将其输入全站仪,全站仪瞄准待测基站后,以定位模块gps坐标为参考解算出待测基站的位置信息,包括经度、纬度、高度gps坐标。地面控制计算机将待测基站的位置信息作为已知条件,生成无人机航迹规划指令,该无人机航迹规划指令用于控制无人机在天空中按照设定航线以待测基站为中心进行绕飞。
45.在一些实施例中,无人机在执行航迹规划指令时,需尽量保证机载信号接收天线指向对准基站天线中心,否则将引入测量误差,导致信号采集设备测量的功率值在数值上偏离预期值、基站天线辐射方向图测量结果畸变。因此,本系统运用光学云台指向实时矫正方法,保证信号接收天线尽量对准基站天线中心;信号接收天线采用宽波束信号接收天线,有效改善辐射方向图畸变问题。
46.在一些实施例中,信号接收天线是一种双极化天线,两个极化方向分别为正45
°
与负45
°
。
47.信号接收天线与基站天线在进行信号传输时,二者极化方向要一致,同时需要将二者的距离保持在合适的距离,此距离应满足远场条件,具体为:r≥2d2/λ,r是信号接收天线和待测基站天线之间的距离,d是待测基站天线口径,λ是待测基站天线辐射信号的波长。
48.在一些实施例中,无人机机身材料包括碳纤维,具有导电特性。测量时,需关注碳纤维结构对信号接收天线本身辐射方向图的影响,因此,对信号接收天线及其工装结构进行共形设计,即在信号接收天线辐射方向图后瓣方向、光学云台金属结构等位置配置吸波材料,同时调整天线外形,如修改信号接收天线馈电巴伦外形后改善馈电端口位置阻抗匹配情况,降低环境对测试的干扰。
49.图2示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试的结构布局示意图。如图2所示,201为待测试基站天线;202为无人机的飞行轨迹示意;203为无人机及其挂载设备;204为gnss,即全球导航卫星系统;205为地面站控制计算机;206为全站仪;207为定位模块。
50.图3示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试方法的一种实现流程图。如图3所示,该基于无人机的外场基站天线方向图和射频测试方法包括以下步骤:
51.在步骤s301中,利用全站仪测量待测基站天线的位置信息;
52.在步骤s302中,地面控制计算机基于待测基站天线的位置信息规划无人机的飞行航线;在所述飞行航线下,无人机以所述基站天线为球心,环绕所述待测基站天线飞行,环绕球面轨迹直径为r,r值由远场条件决定,具体为:
[0053][0054]
其中,r是信号接收天线和待测基站天线之间的距离,d是待测基站天线口径,λ是待测基站天线辐射信号的波长。
[0055]
在步骤s303中,地面控制计算机通过数据传输系统将所规划的无人机航线发送给无人机;
[0056]
在步骤s304中,无人机在地面控制计算机的控制下起飞,并按照所述无人机航线环绕所述待测基站天线飞行;
[0057]
在步骤s305中,无人机系统环绕所述待测基站天线飞行时,利用数据采集系统的信号采集设备获取对应空间位置的功率信息,天空控制计算机利用数据传输系统将获取的功率信息及对应的无人机的空间位置回传至地面控制计算机,地面控制计算机将回传数据存储并在显示器展示功率信息。
[0058]
本实施例中,该方法在基于无人机的外场基站天线方向图和射频测试系统上执行,该基于无人机的外场基站天线方向图和射频测试系统的细节可以参见上文中对图1的描述,在此不再赘述。
[0059]
在一些实施例中,所述基站天线的位置信息包括经度、纬度和高度信息。可以通过定位模块与全站仪测量得到基站天线的位置信息。
[0060]
在无人机系统起飞前,先完成飞行安全检查,启动基于无人机的外场基站天线方向图和射频测试系统。还需要打开地面控制计算机上的地面站软件、数据采集软件,并与无人机系统建立通信。
[0061]
地面控制计算机执行无人机航线规划功能,通过地面站软件输入基站天线的位置信息后,地面控制计算机生成无人机规划航线,并触发无人机起飞,使得无人机系统进入预定飞行轨道。
[0062]
在测试过程中,地面控制计算机实时显示回传数据,直到测试结束。在环绕任务结束后,无人机系统降落,测试结束。
[0063]
在一些实施例中,无人机在飞行过程中,信号接收天线指向跟随云台调整,始终指向基站天线中心,信号采集设备获取对应空间位置的功率,并将功率数据传送给天空控制计算机;光学云台将采集该功率信息时无人机的位置信息传输给天空控制计算机;天空控制计算机利用数据传输系统将功率数据和无人机系统的位置信息回传至地面控制计算机。无人机系统的外观示意图如图4所示。
[0064]
图5示出根据本公开一实施方式的基于无人机的外场基站天线方向图和射频测试方法的完整流程示意图。如图5所示,该方法包括以下步骤:
[0065]
使用定位模块与全站仪测量基站天线经度、纬度、高度信息;
[0066]
完成起飞前安全检查,无人机上电,测试系统启动并执行自检;
[0067]
打开地面控制计算机地面站软件、数据采集软件,与无人机建立通信;
[0068]
在地面站软件中输入基站天线经纬度以及海拔高度,执行航迹规划功能,生成无
人机三维航迹;
[0069]
无人机起飞,按照设定航线执行飞行任务,飞行过程中,信号接收天线指向跟随光学云台调整,始终指向基站天线中心,信号采集设备获取对应空间位置的功率,控制计算机利用数据传输系统将功率数据回传至地面控制计算机。
[0070]
地面控制计算机实时显示回传数据,直到测试结束。
[0071]
以上描述仅为本公开的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本公开中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本公开中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1