一种设备定位轨迹优化及功耗优化方法、装置及介质与流程
1.本发明涉及设备定位技术领域,特别涉及一种设备定位轨迹优化及功耗优化方法、装置及介质。
背景技术:
2.随着社会的发展,人们对各种定位需求的使用越来越多,除了室外gps定位外,基于蓝牙、wifi、lbs等室内定位技术的需求也越来越广。室内定位方案解决了高楼林立的城市区域,或者建筑物内部,以及隧道、地下空间、地下管廊、城市轨道交通建设等卫星系统的覆盖盲区。
3.各种定位技术都有自己的适应场所,gps定位精度高但只能在室外有4颗以上卫星时才能用、定位速度慢、功耗较大;lbs的覆盖广同时适用于室内外,定位精度依赖于基站会有50-3000米的误差,只能用于粗略定位;wifi定位居于gps和lbs之间,但有10-100米的误差,适用于室内外定位。
4.目前智能设备大部分集成gps、wifi和移动网络模块,借助现有的定位技术可基本实现室内外一体化定位,也有许多的室内外定位自适应无缝切换方法。现有技术中的技术方案,通过执行wifi+lbs定位实现粗略定位,从而提高定位速度,同时为了保证定位精度,后续通过gps定位进行补充从而保证定位精度。然而,由于wifi定位的10-100米误差,定位一段时间后(如:半天时间)的历史轨迹效果不好,当设备在一个位置不动时定位轨迹却会在一个位置点周围来回移动,使得定位轨迹形成一片区域,且由于需要经常执行wifi或gps定位,wifi搜索ap信号列表及gps搜索定位信息时均需要cpu处于工作状态,定位模块功耗较大和定位时cpu工作功耗较大。
技术实现要素:
5.本发明要解决的技术问题,在于提供一种设备定位轨迹优化及功耗优化方法、装置及介质,结合计步器和lbs定位功能,在步数和lbs定位都不发生变化时直接使用上一次定位数据,从而优化定位历史轨迹及降低功耗。
6.第一方面,本发明提供了一种设备定位轨迹优化及功耗优化方法,包括:
7.当接收到定位指令时,获取设备当前的计步器的读数和lbs定位数据以及上一次的定位结果;
8.若获取不到上一次的定位结果,则根据设备设置的响应时间要求获取当前定位数据,将定位数据返回给定位指令,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令;
9.若获取到上一次的定位结果,则比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值;
10.当差值小于等于阈值时,将上一次的定位结果返回给定位指令,并等待接收下一次定位指令;
11.当差值大于阈值时,根据设备设置的响应时间要求获取当前定位数据并响应,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令。
12.进一步地,比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值具体包括:
13.计算当前的计步器的读数与上一次的定位结果中的计步器的读数的差值,判断差值是否小于等于设定步数,若否,则判断结果为大于阈值;若是,则进行下一步;
14.判断当前lbs定位数据与上一次的定位结果中的lbs定位数据中,除基站的信号强度以外的其它数据是否一致,若一致则判断结果为小于等于阈值,若不一致则判断结果为大于阈值。
15.进一步地,所述根据设备设置的响应时间要求获取当前定位数据并响应,具体为:
16.当设备设置的响应时间要求高时,先执行wifi+lbs定位实现粗略定位并响应,然后执行gps定位;
17.当设备设置的响应时间要求低时,先执行gps定位,当在预设时间内未获取到gps定位时,执行wifi+lbs定位并响应。
18.第二方面,本发明提供了一种设备定位轨迹优化及功耗优化装置,包括:比较模块、直接响应模块以及定位更新模块;
19.所述比较模块,用于当接收到定位指令时,获取设备当前的计步器的读数和lbs定位数据以及上一次的定位结果;
20.若获取不到上一次的定位结果,则根据设备设置的响应时间要求获取当前定位数据,将定位数据返回给定位指令,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令;
21.若获取到上一次的定位结果,则比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值;
22.所述直接响应模块,用于当差值小于等于阈值时,将上一次的定位结果返回给定位指令,并等待接收下一次定位指令;
23.所述定位更新模块,用于当差值大于阈值时,根据设备设置的响应时间要求获取当前定位数据并响应,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令。
24.进一步地,所述定位更新模块中,根据设备设置的响应时间要求获取当前定位数据并响应,具体为:所述比较模块中,比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值具体包括:
25.计算当前的计步器的读数与上一次的定位结果中的计步器的读数的差值,判断差值是否小于等于设定步数,若否,则判断结果为大于阈值;若是,则进行下一步;
26.判断当前lbs定位数据与上一次的定位结果中的lbs定位数据中,除基站的信号强度以外的其它数据是否一致,若一致则判断结果为小于等于阈值,若不一致则判断结果为大于阈值。
27.进一步地,所述定位更新模块中,根据设备设置的响应时间要求获取当前定位数据并响应,具体为:
28.当设备设置的响应时间要求高时,先执行wifi+lbs定位实现粗略定位并响应,然后执行gps定位;
29.当设备设置的响应时间要求低时,先执行gps定位,当在预设时间内未获取到gps定位时,执行wifi+lbs定位并响应。
30.第三方面,本发明提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现第一方面所述的方法。
31.本发明实施例中提供的技术方案至少具有如下技术效果:
32.1、采用本方法后由于设备静止不动时每次都是上报的相同的定位数据,因此在定位轨迹上就能形成精确的一个点,使得轨迹更为精准有效;
33.2、设备应用此方法后可省下的平均工作电流为0.22ma左右;以800ma的电池为例,使用此方法的前的平均平均工作电流为5.55ma,可工作144小时,应用此方法后的平均工作电流变为5.33ma(5.55ma-0.22ma),可工作时长变成150小时,增加了6小时使用时长。
34.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
35.下面参照附图结合实施例对本发明作进一步的说明。
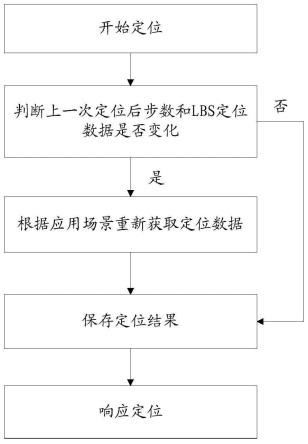
36.图1为本发明方法的总体流程示意图;
37.图2为本发明根据应用场景获取定位数据的流程示意图;
38.图3为现有技术中设备在同一位置放置一天的轨迹图;
39.图4为采用本发明方法设备在同一位置放置一天的轨迹图;
40.图5为本发明实施例二中装置的结构示意图;
41.图6为本发明实施例三中介质的结构示意图。
具体实施方式
42.本技术实施例通过提供一种设备定位轨迹优化及功耗优化方法、装置及介质,结合计步器和lbs定位功能,在步数和lbs定位都不发生变化时直接使用上一次定位数据,从而优化定位历史轨迹及降低功耗。
43.如图1所示,本技术实施例中的技术方案,总体思路如下:
44.由于设备不可能一直改变位置,有大部分的时间它的位置是在同一地方不动的,因此可以通过步数及lbs定位数据的变化来判断它位置的改变,步数用于一般的设备位置移动判断,lbs用于动车类平稳位置移动判断。如果设备步数和lbs定位数据都未变化,则直接使用上一次定位的数据响应定位上报;若设备步数或lbs定位数据发生变化,则根据应用场景重新获取定位数据,并保存本次的定位结果及当前设备步数和lbs数据以便后续定位时使用。
45.如图2所示,根据应用场景获取定位数据包括:
46.当在时间响应要求高的定位场景时,先判断上一次定位后设备步数及lbs是否变化,如果设备步数及lbs未变化则直接使用上一次定位的数据响应定位上报,若设备步数发
生变化则直接使用wifi+lbs先粗略定位,然后补充gps定位数据,并保存本次的定位结果及当前设备步数及lbs以便后续定位时使用。
47.而设备在时间要求不高的定位场景时,先判断上一次定位后设备步数及lbs是否变化,如果设备步数及lbs未变化则直接使用上一次定位的数据响应定位上报,若设备步数发生变化则,先进行gps定位,在预设的时间内(如2分钟,可更改)gps定位取不到数据时再进行wifi+lbs定位,定位不成功时(如室内,无gps信号等)再获取wifi+lbs的数据进行定位,并保存本次的定位结果及当前设备步数及lbs以便后续定位时使用。
48.判断设备位置是否变化及定位结果有可以有多种方法,其中一种实现方式为:
49.a.位置是否发生变化:
50.通过步数(step变量)及lbs(lbs_mcc,lbs_mnc,lbs_cellid,lbs_lac)的变化来进行,因为基站的信号强度是会有所波动的,故判断位置变化时忽略基站的信号强度(lbs_dbm);
51.b.保存定位结果:
52.定位数据包括:lbs,wifi,gps三种定位数据,本发明实例中是通过lbs(lbs_mcc,lbs_mnc,lbs_cellid,lbs_lac,lbs_dbm),wifi,gps这三个成员变量来实现的。
53.加入步数及lbs判断移动后的轨迹效果:现有技术由于wifi定位的10-100米误差,定位一段时间后(如:半天时间)的历史轨迹效果不好(设备呆在一个位置不动时会在一个位置点周围来回各种移动,轨迹形成一片区域,如图3所示)。采用本技术后由于设备放着不动时它每次都是上报的同一个定位数据,在定位轨迹上就能变成精确的一个点,如图4所示。
54.加入步数及lbs判断移动后的功耗优化:以本方法所使用的设备实测为例,cpu休眠功耗0.8ma左右,cpu工作功耗在10ma左右;wifi模块休眠功耗10ua左右,而wifi工作功耗1.5ma左右;gps待机功耗30ua,而gps模块工作功耗在60ma左右。
55.故wifi+cpu工作功耗为:11.5ma左右;而gps+cpu工作功耗为:70ma左右;待机功耗为:0.82ma左右。
56.假定每3分钟定时定位一次数据,以及设备都放在室内位置不变化且每次都以6秒获取wifi的wifi+lbs定位方式工作为例(每3分钟一次wifi+cpu的工作功耗),则可省下的平均工作电流为0.22ma左右。
57.以800ma的电池为例,应用此方法前的平均工作电流为5.55ma,可工作144小时,应用此方法后的平均工作电流变为5.33ma(5.55ma-0.22ma),可工作时长变成150小时,增加了6小时使用时长。
58.实施例一
59.本实施例提供一种设备定位轨迹优化及功耗优化方法,如图1-2所示,包括:
60.当接收到定位指令时,获取设备当前的计步器的读数和lbs定位数据以及上一次的定位结果;
61.若获取不到上一次的定位结果,则根据设备设置的响应时间要求获取当前定位数据(当能获取到gps定位数据时,当前定位数据为gps定位数据;当无法获取到gps定位数据时,当前定位数据为wifi+lbs定位数据),将定位数据返回给定位指令,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令;
62.若获取到上一次的定位结果,则比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值;
63.当差值小于等于阈值时,将上一次的定位结果返回给定位指令,并等待接收下一次定位指令;
64.当差值大于阈值时,根据设备设置的响应时间要求获取当前定位数据并响应,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令。
65.在一种可能的实现方式中,比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值具体包括:
66.计算当前的计步器的读数与上一次的定位结果中的计步器的读数的差值,判断差值是否小于等于设定步数(设定步数可以为5或10,或者根据需要设置为其它值),若否,则判断结果为大于阈值;若是,则进行下一步;
67.判断当前lbs定位数据与上一次的定位结果中的lbs定位数据中,除基站的信号强度以外的其它数据是否一致,若一致则判断结果为小于等于阈值,若不一致则判断结果为大于阈值。
68.在一种可能的实现方式中,所述根据设备设置的响应时间要求获取当前定位数据并响应,具体为:
69.当设备设置的响应时间要求高时,先执行wifi+lbs定位实现粗略定位并响应,然后执行gps定位;
70.当设备设置的响应时间要求低时,先执行gps定位,当在预设时间内未获取到gps定位时,执行wifi+lbs定位并响应。
71.基于同一发明构思,本技术还提供了与实施例一中的方法对应的装置,详见实施例二。
72.实施例二
73.在本实施例中提供了一种设备定位轨迹优化及功耗优化装置,如图5所示,包括:比较模块、直接响应模块以及定位更新模块;
74.所述比较模块,用于当接收到定位指令时,获取设备当前的计步器的读数和lbs定位数据以及上一次的定位结果;
75.若获取不到上一次的定位结果,则根据设备设置的响应时间要求获取当前定位数据,将定位数据返回给定位指令,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令;
76.若获取到上一次的定位结果,则比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值;
77.所述直接响应模块,用于当差值小于等于阈值时,将上一次的定位结果返回给定位指令,并等待接收下一次定位指令;
78.所述定位更新模块,用于当差值大于阈值时,根据设备设置的响应时间要求获取当前定位数据并响应,然后将当前的计步器的读数、lbs定位数据和当前定位数据保存为定位结果,并等待接收下一次定位指令。
79.在一种可能的实现方式中,所述定位更新模块中,根据设备设置的当前响应时间
要求获取定位数据并响应,具体为:所述比较模块中,比较当前的计步器的读数与lbs定位数据与上一次的定位结果中对应数据的差值是否小于阈值具体包括:
80.计算当前的计步器的读数与上一次的定位结果中的计步器的读数的差值,判断差值是否小于等于设定步数,若否,则判断结果为大于阈值;若是,则进行下一步;
81.判断当前lbs定位数据与上一次的定位结果中的lbs定位数据中,除基站的信号强度以外的其它数据是否一致,若一致则判断结果为小于等于阈值,若不一致则判断结果为大于阈值。
82.在一种可能的实现方式中,所述定位更新模块中,根据设备设置的响应时间要求获取当前定位数据并响应,具体为:
83.当设备设置的响应时间要求高时,先执行wifi+lbs定位实现粗略定位并响应,然后执行gps定位;
84.当设备设置的响应时间要求低时,先执行gps定位,当在预设时间内未获取到gps定位时,执行wifi+lbs定位并响应。
85.由于本发明实施例二所介绍的装置,为实施本发明实施例一的方法所采用的装置,故而基于本发明实施例一所介绍的方法,本领域所属人员能够了解该装置的具体结构及变形,故而在此不再赘述。凡是本发明实施例一的方法所采用的装置都属于本发明所欲保护的范围。
86.基于同一发明构思,本技术提供了实施例一对应的存储介质,详见实施例三。
87.实施例三
88.本实施例提供一种计算机可读存储介质,如图6所示,其上存储有计算机程序,该计算机程序被处理器执行时,可以实现实施例一中任一实施方式。
89.由于本实施例所介绍的计算机可读存储介质为实施本技术实施例一中方法所采用的计算机可读存储介质,故而基于本技术实施例一中所介绍的方法,本领域所属技术人员能够了解本实施例的计算机可读存储介质的具体实施方式以及其各种变化形式,所以在此对于该计算机可读存储介质如何实现本技术实施例中的方法不再详细介绍。只要本领域所属技术人员实施本技术实施例中的方法所采用的计算机可读存储介质,都属于本技术所欲保护的范围。
90.本发明在设备静止不动时每次都是上报的相同的定位数据,因此在定位轨迹上就能形成精确的一个点,使得轨迹更为精准有效;设备应用此方法后可省下的平均工作电流为0.22ma左右;以800ma的电池为例,使用此方法的前的平均平均工作电流为5.55ma,可工作144小时,应用此方法后的平均工作电流变为5.33ma(5.55ma-0.22ma),可工作时长变成150小时,增加了6小时使用时长。
91.本领域内的技术人员应明白,本发明的实施例可提供为方法、装置、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。
92.本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流
程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
93.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
94.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
95.虽然以上描述了本发明的具体实施方式,但是熟悉本技术领域的技术人员应当理解,我们所描述的具体的实施例只是说明性的,而不是用于对本发明的范围的限定,熟悉本领域的技术人员在依照本发明的精神所作的等效的修饰以及变化,都应当涵盖在本发明的权利要求所保护的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1