用于三维建模的图像获取方法、系统及三维建模方法与流程
1.本发明涉及图像处理技术领域,尤其涉及一种用于三维建模的图像获取方法、系统及三维建模方法。
背景技术:
2.影像拍摄建模是一种只使用光学摄影就可以重建三维模型的方法,其需要遵循以下原则:
3.1.距离合适,以保证模型纹理的清晰程度和目标物体本身更多的特征点。
4.2.要有足够的照片重叠度。照片重叠度是指相邻两张照片重叠区域占整个画幅的比例,一般而言为60%比较好,其可以使模型纹理贴合的更加完整。
5.3.需要多层级拍摄,以通过空三解算等方式生成目标物体的三维几何构造,以获取物体的三维模型。
6.但现有技术中缺乏对于上述原则的用户操作引导。而用户一般情况下是完全不知以上原则对于建模成功率具有何种影响,少数用户知道此原理,但是实际操作时也不知当前图像拍摄过程是否满足上述原则要求,只能依靠主观判别,缺乏数据依据,最终导致三维建模不佳。
技术实现要素:
7.为解决上述技术问题,本发明提供了一种用于三维重建的图像获取方法、系统及三维建模方法,其可以可视化的方式引导用户完成图片拍摄,获取符合三维建模要求的高质量图片。
8.为实现上述目的,本发明提供如下技术方案:
9.一种用于三维建模的图像获取方法,其包括:
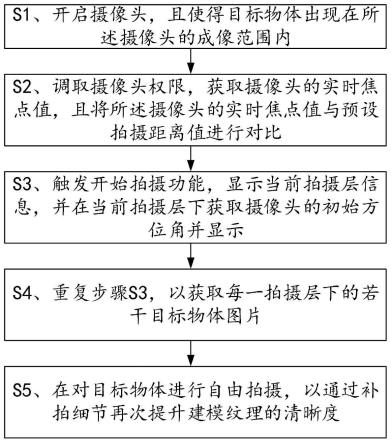
10.s1、开启摄像头,且使得目标物体出现在所述摄像头的成像范围内;
11.s2、获取摄像头的实时焦点值,且将所述摄像头的实时焦点值与预设拍摄距离值进行对比,并根据对比结果显示与其对应的当前拍摄距离状态提示信息;
12.s3、触发开始拍摄功能,显示当前拍摄层信息;再使得摄像头围绕目标物体转动至预定位置,以及在该预定位置下通过摄像头拍摄获取目标物体图片;
13.重复使得摄像头围绕目标物体转动至预定位置,以及在该预定位置下通过摄像头拍摄获取目标物体图片的步骤,直至获取当前摄像层下的若干目标物体图片;
14.s4、重复步骤s3,以获取每一拍摄层下的若干目标物体图片。
15.优选的,根据对比结果显示与其对应的当前拍摄距离状态提示信息包括如下步骤:
16.s21、设置不同的拍摄距离提示标签以及设置距离游标;
17.s22、所述距离游标根据对比结果实时移动至对应的拍摄距离提示标签处。
18.优选的,步骤s3中,显示当前拍摄层信息后,在当前拍摄层下获取摄像头的初始方
位角并显示;
19.以及,摄像头围绕目标物体转动至预定位置后,获取该预定位置下摄像头的当前方位角信息并显示。
20.优选的,摄像头每次围绕目标物体转动的角度为30
°
。
21.优选的,不同的拍摄角度对应不同的拍摄层,所述拍摄角度为摄像头的镜头和目标物体的连线与水平面之间的夹角。
22.优选的,所述拍摄角度的确定包括如下步骤:
23.获取搭载所述摄像头的智能移动终端的重力值在x,y,z轴上的分量,并根据在x,y轴的重力值分量获取智能移动终端在水平面的重力值分量atan2(x,y);其中,摄像头的镜头的朝向为z轴;
24.根据z轴的重力值分量获取智能移动终端与水平面的弧度;
25.将智能移动终端与水平面的弧度换算成所述拍摄角度。
26.优选的,步骤s3中,摄像头围绕目标物体转动至预定位置的过程中,同步提示转动速度信息。
27.还提供一种三维建模方法,其包括权利要求1-7任一项所述的图片获取方法,且在步骤s5后还具有步骤s6:通过拍摄获取的图片完成目标物体的三维建模。
28.还提供一种用于上述图片获取方法的图片获取系统,其包括:
29.摄像头,其用于获取目标物体的图片信息;
30.拍摄距离计算单元,其用于获取摄像头的实时焦点值,且将所述摄像头的实时焦点值与预设拍摄距离值进行对比;
31.拍摄距离提示单元,其用于根据摄像头的实时焦点值与预设拍摄距离值的对比结果显示与其对应的当前拍摄距离状态提示信息;
32.拍摄角度计算单元,其用于获取摄像头的镜头和目标物体的连线与水平面之间的夹角,该夹角即为拍摄角度;
33.拍摄层显示单元,其用于根据拍摄角度显示不同的拍摄层。
34.优选的,所述摄像头搭载在智能移动终端上。
35.相比于现有技术,本发明通过全程可视化的方式辅助用户完成三维建模的拍照过程,其可以直观、动态展示用户拍照时,摄像头与目标物体之间的距离、拍照的重叠度是否达到要求,以及显示当前拍摄的层数,提醒用户进行拍摄角度、距离的实时调整,提高图片质量,进一步提高后续三维建模的效果,减少建模失败的概率。
附图说明
36.图1为本发明用于三维重建的图像获取方法的步骤流程图;
37.图2为本发明中显示拍摄层、拍摄距离、方位角的界面示意图;
38.图3为本发明中获取拍摄角度时摄像头与目标物体的位置关系示意图;
39.图4为本发明中获取拍摄角度时xyz三轴的示意图;
40.图5为本发明中显示转动速度信息以及转动至a1方位角时的界面示意图;
41.图6为本发明中显示转动速度信息以及转动至a2方位角时的界面示意图;
42.图7为本发明中图像获取系统的结构示意图。
43.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
44.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
45.实施例1:
46.本实施例提供了一种用于三维建模的图像获取方法,如图1所示,其包括如下步骤:
47.s1、开启摄像头,且使得目标物体出现在所述摄像头的成像范围内,所述摄像头搭载在智能移动终端上,且所述智能移动终端包括但不限于是便携计算机、平板电脑、智能手机以及可穿戴设备等;
48.s2、调取摄像头权限,获取摄像头的实时焦点值,且将所述摄像头的实时焦点值与预设拍摄距离值进行对比,并根据对比结果显示与其对应的当前拍摄距离状态提示信息;
49.并根据所述当前拍摄距离状态提示信息调整摄像头与目标物体之间的距离,直至摄像头与目标物体之间的距离满足拍摄距离要求;
50.其中,所述预设拍摄距离值为摄像头与目标物体之间的标准拍摄距离,该标准拍摄距离下,摄像头所获取的目标物体图片满足目标物体三维模型重建要求,该预设拍摄距离值可根据以往经验设置;
51.进一步的,“根据对比结果显示与其对应的当前拍摄距离状态提示信息”包括如下步骤:
52.s21、设置不同的拍摄距离提示标签1,如图2中黄色的“距离太远”、浅绿的“欠佳”、蓝色的“合适”、紫色的“距离太近”等;
53.以及设置距离游标2;
54.s22、所述距离游标2根据对比结果实时移动至对应的拍摄距离提示标签1处,且以音频和/或视频和/或文字和/或图形的方式同步提示当前拍摄距离是否满足要求;
55.例如,图2中,距离游标2根据对比结果移动至蓝色的“合适”拍摄距离提示标签1处,且界面上以文字框3的形式同步显示“距离合适”,以提示当前拍摄距离满足要求;
56.由此,所述摄像头的实时焦点值与预设拍摄距离值的对比结果与不同的当前拍摄距离状态提示信息动态对应,即,距离游标2可根据对比结果实时移动至对应的拍摄距离提示标签1处,用户可直观知晓当前拍摄距离是否满足拍摄要求,并根据距离游标2和/或同步提示的当前拍摄距离是否满足要求的信息实时调整摄像头与目标物体之间的拍摄距离,使其满足条件,如达到“距离合适”的要求;
57.s3、触发开始拍摄功能,显示当前拍摄层信息,并在当前拍摄层下获取摄像头的初始方位角并显示;
58.再使得摄像头围绕目标物体转动至预定位置,获取该预定位置下摄像头的当前方位角信息并显示,以及在该预定位置下通过摄像头拍摄获取目标物体图片;
59.重复上述“使得摄像头围绕目标物体转动至预定位置,获取该预定位置下摄像头的当前方位角信息并显示,以及在该预定位置下通过摄像头拍摄获取目标物体图片”的步骤,直至获取当前摄像层下的若干目标物体图片;优选的,摄像头每次围绕目标物体转动的角度为30
°
,以满足图片重叠度要求;
60.具体的,如图3所示,摄像头4和目标物体100的连线与水平面s之间的夹角为拍摄角度,不同的拍摄角度对应不同的拍摄层,如图4所示,所述拍摄角度的确定包括如下步骤:
61.获取搭载所述摄像头4的智能移动终端200(如智能手机)的重力值在x,y,z轴上的分量(可通过陀螺仪获取),并根据在x,y轴的重力值分量获取智能移动终端200在水平面s的重力值分量atan2(x,y);其中,摄像头4镜头的朝向为z轴,智能移动终端200屏幕所在平面为xy平面,此时xz平面也即为水平面s;
62.根据z轴的重力值分量获取智能移动终端200与水平面s的弧度;例如,可利用智能移动终端200在水平面s的重力值分量atan2(x,y)获取xyz轴原点到点(x,y)的方位角,其返回值即为智能移动终端200与水平面s的弧度,其中,参数x,y分别代表x轴,y轴坐标的浮点值;
63.将智能移动终端200与水平面s的弧度换算成所述拍摄角度,例如,可利用公式angle/(.pi*180)将智能移动终端200与水平面s的弧度转换为拍摄角度,其中,angle为智能移动终端200与水平面s的弧度,.pi是系统定值;
64.进一步的,拍摄层的数量可人为进行设置,如图2所示,本实施例设有第一拍摄层l1、第二拍摄层l2、第三拍摄层l3,其分别对应的拍摄角度范围为0
°‑
30
°
、30
°‑
75
°
、75
°‑
90
°
,其中,第一拍摄层l1可以捕捉目标物体的正视面和略带角度的俯视面,第二拍摄层l2可以捕捉更多目标物体俯视和正视交界处的细节,帮助后期构建空间几何构造,第三拍摄层l3可以捕捉目标物体俯视面和略带角度的正视面;
65.摄像头的当前方位角可通过陀螺仪等计算摄像头在转动至预定位置时,其相对于初始方位角的偏移量来获得;
66.下面以第三拍摄层l3为例对步骤s3进行说明:
67.用户点击开始拍摄功能按钮,且调整拍摄姿势,搭载所述摄像头4的智能移动终端200自动计算所述拍摄角度,且根据所述拍摄角度自动确定当前拍摄层并显示(如第二拍摄层l2的角度范围30
°‑
75
°
被点亮等),用户则根据显示的当前拍摄层信息调整拍摄姿势,直至所述拍摄角度与预期的拍摄层(如第三拍摄层l3)对应,并显示该拍摄层(如第三拍摄层l3的角度范围75
°‑
90
°
被点亮等);
68.如图2所示,所述拍摄角度与预期的拍摄层对应后,在当前拍摄层(如第三拍摄层l3)下,获取摄像头4的初始方位角a0并显示;
69.如图5所示,再使得摄像头围绕目标物体转动至预定位置,获取该预定位置下摄像头的当前方位角信息a1并显示,以及在该预定位置下通过摄像头拍摄获取目标物体图片p1;
70.如图6所示,摄像头围绕目标物体转动至下一预定位置,同样获取该预定位置下摄像头的当前方位角信息a2并显示,以及在该预定位置下通过摄像头拍摄获取目标物体图片p2;如此重复,直至获取当前摄像层下的若干目标物体图片;
71.s4、重复步骤s3,以获取每一拍摄层下的若干目标物体图片;
72.s5、在对目标物体进行自由拍摄,以通过补拍细节再次提升建模纹理的清晰度,所述自由拍摄为摄像头在任意拍摄角度、任意方位角下对目标物体进行拍摄。
73.由此,本实施例中的图片获取方法通过可视化的方式直观展示用户拍照时,摄像头与目标物体之间的距离、拍照的重叠度(通过方位角变化体现)是否达到要求,以及显示
当前拍摄的层数,由此提醒用户所获取的图片是否达到三维建模的基本要求,辅助用户进行拍摄角度、距离的实时调整,提高图片质量,进一步提高后续三维建模的效果,减少建模失败的概率。
74.实施例2:
75.本实施例与实施例1的区别之处仅在于,如图5所示,步骤s3中,再使得摄像头围绕目标物体转动至预定位置的过程中,以音频和/或视频和/或文字和/或图形的方式同步提示转动速度信息5,如图5中通过文字形式显示“您移动得太快了”,以提醒用户降低转动速度,以获得质量更高的图片。
76.通过监控手机陀螺仪,获取到用户对手机施加的加速度,从而获取到x轴、y轴、z轴的加速度值,我们默认定义的加速度值为0.25,当任意轴上的加速度值超过默认值的时候,我们视为用户移动手机过快,从而提醒用户缓慢移动手机进行拍摄.
77.实施例3:
78.本实施例提供了一种三维建模方法,其包括实施例1或2中的图片获取方法,且在步骤s5后还具有步骤s6:通过拍摄获取的图片完成目标物体的三维建模,该过程为现有技术,不再赘述。
79.实施例4:
80.本实施例提供了一种用于实现实施例1或2中所述图片获取方法的图片获取系统,如图7所示,其包括:
81.摄像头4,其用于获取目标物体100的图片信息;
82.拍摄距离计算单元6,其用于获取摄像头4的实时焦点值,且将所述摄像头4的实时焦点值与预设拍摄距离值进行对比;
83.拍摄距离提示单元7,其用于根据摄像头4的实时焦点值与预设拍摄距离值的对比结果显示与其对应的当前拍摄距离状态提示信息;
84.拍摄角度计算单元8,其用于获取摄像头4的镜头和目标物体100的连线与水平面s之间的夹角,该夹角即为拍摄角度;拍摄角度的获取方法与步骤s3相同,不再赘述;
85.拍摄层显示单元9,其用于根据拍摄角度显示不同的拍摄层;
86.转动方位角显示单元10,其用于显示摄像头围绕目标物体转动时的方位角信息;
87.以及转动速度提示单元11,其用于显示摄像头围绕目标物体转动时的速度信息。
88.综上所述,本发明可以通过全程可视化的方式辅助用户完成三维建模的拍照过程,其可以直观、动态展示用户拍照时,摄像头与目标物体之间的距离、拍照的重叠度是否达到要求,以及显示当前拍摄的层数,提醒用户进行拍摄角度、距离的实时调整,提高图片质量,进一步提高后续三维建模的效果,减少建模失败的概率。
89.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到各种等效的修改或替换,这些修改或替换都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1