一种基于物联网的安防装置及其工作方法
1.本发明涉及安防装置技术领域,具体为一种基于物联网的安防装置及其工作方法。
背景技术:
2.智能建筑的安防包括信息通信网络的安防、建筑设备安防监控、火灾报警及安全防范、综合布线系统、电源与接地、环境以及住宅的安防等。
3.如申请号为cn114615420a名为一种基于物联网的智能建筑安防装置,包括:外壳、安防检测机构、角度调节机构、散热除尘机构以及除虫清理机构;所述外壳的底部设置有圆形底壳,所述外壳的顶部安装有遮罩;其中,安防检测机构安装于外壳的外部,安防检测结构用于检测智能建筑区域的空气质量以及影像信息;其中,角度调节机构安装于外壳的内部,角度调节机构用于改变安防检测机构的检测角度,散热除尘机构安装于安防检测机构内部。
4.上述装置在使用的过程中,仅能对施工环境进行安防检测,功能性低;所以我们提出了一种基于物联网的安防装置及其工作方法,以便于解决上述中提出的问题。
技术实现要素:
5.本发明的目的在于提供一种基于物联网的安防装置及其工作方法,以解决上述背景技术中提出的现有装置在使用的过程中,仅能对施工环境进行安防检测,功能性低的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于物联网的安防装置,包括动力台,所述动力台的上方安装有u形支座,所述u形支座的内部安装有安防机构;
7.还包括:
8.图像采集模块,其设置在所述安防机构的内部,所述安防机构前端的中间位置处安装有镜头,所述镜头的四周安装有红外感温探头,且红外感温探头设置有四个,所述图像采集模块的内部安装有光学映射模块;
9.驱动柜,其设置在所述动力台的下方;
10.控制柜,其设置所述驱动柜的下方,所述控制柜的内部安装有中央处理器、无线数传模块、gps定位模块、gsm模块和电机驱动模块,所述控制柜下端的前方安装有万向轮,所述控制柜下端的后方安装有定向轮,所述万向轮和定向轮的一侧均安装有刹车片;
11.推杆,其安装在所述动力台的后端;
12.柜门,其安装在所述驱动柜和控制柜的前端面,所述柜门的一侧通过铰链与驱动柜和控制柜转动连接,所述柜门的另一侧安装有弹跳锁。
13.优选的,所述中央处理器的输出端与gsm模块的输入端电性连接,所述图像采集模块、红外感温探头、光学映射模块和gps定位模块的输出端均与中央处理器的输入端电性连接。
14.优选的,所述安防机构前端的外壁上安装有定位盘,所述定位盘的后端安装有框架套筒,且框架套筒通过螺钉与定位盘螺纹连接,所述框架套筒的外壁设置有无纺布层,所述安防机构的前端面上安装有uv保护镜。
15.优选的,所述框架套筒的后端安装有散热风扇,所述散热风扇的外壁上安装有隔尘网。
16.优选的,所述隔尘网的后端安装有烟雾传感器,所述散热风扇的一侧设置有温度传感器,且温度传感器的检测端贯穿并延伸至框架套筒的内部,所述温度传感器和烟雾传感器的输出端均与中央处理器的输入端电性连接。
17.优选的,所述中央处理器通过无线数传模块与物联网终端双向连接,所述物联网终端与bim系统和图像处理系统双向连接。
18.优选的,所述u形支座一侧的外壁上安装有第一步进电机,所述第一步进电机的输出端贯穿并延伸至u形支座的内部,且安装有主动齿轮,所述主动齿轮的上端安装有从动齿轮,所述安防机构的两侧均安装有转轴,且安防机构一侧的转轴与从动齿轮固定连接,所述安防机构另一侧的转轴与u形支座的连接处安装有轴承,所述u形支座的下端安装有涡轮台,且涡轮台设置在动力台的内部,所述涡轮台的外壁上安装有涡轮,所述涡轮的一侧安装有蜗杆,所述蜗杆的一端安装有支架,所述蜗杆的另一端安装有第二步进电机,所述中央处理器的输出端通过电机驱动模块与第一步进电机和第二步进电机的输入端电性连接。
19.优选的,所述驱动柜内部的一侧安装有电源模块,所述驱动柜内部的另一侧安装有气泵,所述电源模块与气泵之间安装有隔板,所述气泵的进气口处安装有进气管,且进气管的一端延伸至驱动柜的外部,所述进气管的内部安装有活性炭过滤筒,所述气泵的出气口处安装有出气管,所述出气管的一端安装有电动三通阀,所述电动三通阀的外壁上安装有三通阀电机,所述电动三通阀的第一接头处安装有涡流管制冷器,所述涡流管制冷器的下方安装有热气流管,且热气流管的一端贯穿并延伸至驱动柜的外部,所述涡流管制冷器的一侧安装有冷气流管,所述u形支座底面的上端安装有喷嘴,所述喷嘴通过导气管与冷气流管相连通,所述气泵的输入端与中央处理器的输出端电性连接。
20.优选的,所述电动三通阀的第二接头处安装有绕流管,且绕流管的一端与冷气流管相连通,所述冷气流管的内部安装有止逆阀。
21.优选的,所述一种基于物联网的安防装置的工作方法,包括以下步骤:
22.步骤一:由bim系统完成施工建筑的预制模型,根据预制模型确定合适的安防装置布设点,由物联网将位置信息反馈至多个安防装置;
23.步骤二:由施工人员根据安防装置内置的gps定位模块,结合bim系统反馈的位置信息,将安防装置推行至布设点位;
24.步骤三:架设完毕后,由安防装置内的中央处理器驱动电机驱动模块运行,利用第一步进电机和第二步进电机带动安防机构上下左右偏转,由图像采集模块全面采集施工图像,安防机构内置光学映射模块,通过光学映射和数学计算可得出真实坐标点信息,完毕后通过无线数传模块将图像以及坐标信息上传至物联网终端;
25.步骤四:物联网终端在接收到施工图像和坐标信息后,进一步将其反馈至图像处理系统,图像处理系统内置opencv,可对图像中建筑结构的角点以及边缘位置进行捕捉,建立半稠密点云图,之后反馈至物联网终端,物联网通过特征匹配和坐标对其的方式,将获取
的半稠密点云图与bim系统中虚拟模型比对,确认实际施工与模型设计不一致之处,及时做出调整和记录;
26.步骤五:安防机构运行过程中,后端的红外感温探头实时检测内部温度,当温度较高时,首先由安防机构后端的散热风扇排出内部热量,安防机构外壳采用框架套筒与无纺布层相结合制成,透风性强,保证了散热效果,当环境温较高,红外感温探头检测温度无明显变化时,中央处理器会发送信号至气泵,由气泵将外部空气低压导入涡流管制冷器,外部空气通过涡流管内涡流腔的能量转换,一端产生热空气从热气流管排出装置外部,另一端则产生冷空气经由冷气流管以及导气管进入喷嘴,有喷嘴将冷空气喷吹至安防机构,经由散热风扇引导高效带走内部热量,保证安防机构长效运行;
27.步骤六:拍摄图像过程中,若图像处理系统判断图像信息颗粒较多,即代表安防机构的uv保护镜表面沾染粉尘较多,此时由中央处理器发送信号至电机驱动模块,利用第一步进电机带动安防机构的uv保护镜朝向下方的喷嘴,此时三通阀电机驱动,带动电动三通阀换路,由气泵将外部空气高压导入绕流管,经由导气管将气体导入喷嘴,高压喷射至uv保护镜表面,除尘后,安防机构复位,继续进行拍摄,以保证图像采集效果。
28.与现有技术相比,本发明的有益效果是:
29.1、本发明通过由bim系统完成施工建筑的预制模型,根据预制模型确定合适的安防装置布设点,安防装置架设完毕后,由装置内的中央处理器驱动电机驱动模块运行,利用第一步进电机和第二步进电机带动安防机构上下左右偏转,由图像采集模块全面采集施工图像,安防机构内置光学映射模块,通过光学映射和数学计算可得出真实坐标点信息,完毕后通过无线数传模块42将图像以及坐标信息上传至物联网终端,物联网终端在接收到施工图像和坐标信息后,进一步将其反馈至图像处理系统,图像处理系统内置opencv,可对图像中建筑结构的角点以及边缘位置进行捕捉,建立半稠密点云图,之后反馈至物联网终端,物联网通过特征匹配和坐标对其的方式,将获取的半稠密点云图与bim系统中虚拟模型比对,确认实际施工与模型设计不一致之处,及时做出调整和记录,提升施工质量和效率,避免错误导致的返工成本,解决了现有安防装置在使用的过程中,仅能对施工环境进行安防检测,功能性低的问题。
30.2、本技术的安防机构运行过程中,后端的红外感温探头可实时检测内部温度,当温度较高时,首先由安防机构后端的散热风扇排出内部热量,安防机构外壳采用框架套筒与无纺布层相结合制成,透风性强,保证了散热效果,当环境温较高,红外感温探头检测温度无明显变化时,中央处理器会发送信号至气泵,由气泵将外部空气低压导入涡流管制冷器,外部空气通过涡流管内涡流腔的能量转换,一端产生热空气从热气流管排出装置外部,另一端则产生冷空气经由冷气流管以及导气管进入喷嘴,有喷嘴将冷空气喷吹至安防机构,经由散热风扇引导高效带走内部热量,保证安防机构长效运行,进一步提高了安装装置的功能性。
31.3、该安防装置在图像采集过程中,若图像处理系统判断图像信息颗粒较多,即代表安防机构的uv保护镜表面沾染粉尘较多,此时由中央处理器发送信号至电机驱动模块,利用第一步进电机带动安防机构的uv保护镜朝向下方的喷嘴,此时三通阀电机驱动,带动电动三通阀换路,由气泵将外部空气高压导入绕流管,经由导气管将气体导入喷嘴,高压喷射至uv保护镜表面,除尘后,安防机构复位,继续进行拍摄,以保证图像采集效果。
附图说明
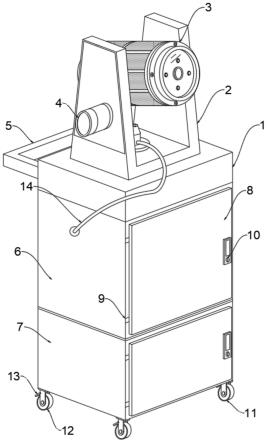
32.图1为本发明的整体结构示意图;
33.图2为本发明的动力台和u形支座传动结构示意图;
34.图3为本发明的驱动柜内部结构示意图;
35.图4为本发明的安防机构局部结构示意图;
36.图5为本发明的安防机构后端面结构示意图;
37.图6为本发明的原理图;
38.图中:1、动力台;2、u形支座;3、安防机构;301、图像采集模块;302、镜头;303、红外感温探头;304、uv保护镜;305、定位盘;306、螺钉;307、框架套筒;308、无纺布层;4、第一步进电机;5、推杆;6、驱动柜;7、控制柜;8、柜门;9、铰链;10、弹跳锁;11、万向轮;12、定向轮;13、刹车片;14、导气管;15、喷嘴;16、转轴;17、从动齿轮;18、主动齿轮;19、轴承;20、涡轮台;21、涡轮;22、蜗杆;23、支架;24、第二步进电机;25、气泵;26、出气管;27、电动三通阀;271、三通阀电机;28、涡流管制冷器;29、冷气流管;30、热气流管;31、绕流管;32、止逆阀;33、进气管;34、活性炭过滤筒;35、电源模块;36、隔板;37、散热风扇;38、隔尘网;39、烟雾传感器;40、温度传感器;41、中央处理器;42、无线数传模块;43、gps定位模块;44、gsm模块;45、光学映射模块;46、电机驱动模块。
具体实施方式
39.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
40.请参阅图1-6,本发明提供的一种实施例:一种基于物联网的安防装置,包括动力台1,动力台1的上方安装有u形支座2,u形支座2的内部安装有安防机构3;
41.还包括:
42.图像采集模块301,其设置在安防机构3的内部,安防机构3前端的中间位置处安装有镜头302,镜头302的四周安装有红外感温探头303,且红外感温探头303设置有四个,图像采集模块301的内部安装有光学映射模块45;
43.驱动柜6,其设置在动力台1的下方;
44.控制柜7,其设置驱动柜6的下方,控制柜7的内部安装有中央处理器41、无线数传模块42、gps定位模块43、gsm模块44和电机驱动模块46,控制柜7下端的前方安装有万向轮11,控制柜7下端的后方安装有定向轮12,万向轮11和定向轮12的一侧均安装有刹车片13;
45.推杆5,其安装在动力台1的后端;
46.柜门8,其安装在驱动柜6和控制柜7的前端面,柜门8的一侧通过铰链9与驱动柜6和控制柜7转动连接,柜门8的另一侧安装有弹跳锁10。
47.请参阅图6,中央处理器41的输出端与gsm模块44的输入端电性连接,图像采集模块301、红外感温探头303、光学映射模块45和gps定位模块43的输出端均与中央处理器41的输入端电性连接,图像采集模块301用于采集施工场地的图像信息,红外感温探头303可检测当前环境温度,光学映射模块45用于配合数学计算建立坐标体系,gps定位模块43可确定安防装置的设置位置。
48.请参阅图4,安防机构3前端的外壁上安装有定位盘305,定位盘305的后端安装有
框架套筒307,且框架套筒307通过螺钉306与定位盘305螺纹连接,框架套筒307的外壁设置有无纺布层308,安防机构3的前端面上安装有uv保护镜304,相较于传统的封闭壳体,该安防机构3外壳采用框架套筒307与无纺布层308相结合的方式,由框架套筒307保证结构强度,而无纺布层308作为透风结构,保证了隔尘效果,显著提高了安防机构3的散热效率。
49.请参阅图5,框架套筒307的后端安装有散热风扇37,散热风扇37的外壁上安装有隔尘网38,散热风扇37用于提升安防机构3内部空气流通的速度,提高散热效果。
50.请参阅图5和图6,隔尘网38的后端安装有烟雾传感器39,散热风扇37的一侧设置有温度传感器40,且温度传感器40的检测端贯穿并延伸至框架套筒307的内部,温度传感器40和烟雾传感器39的输出端均与中央处理器41的输入端电性连接,温度传感器40可检测安防机构3内的温度,烟雾传感器39配合红外感温探头303使用,可检测空气中烟雾含量,在火灾发生时能第一时间报警。
51.请参阅图6,中央处理器41通过无线数传模块42与物联网终端双向连接,物联网终端与bim系统和图像处理系统双向连接,中央处理器41可通过无线数传模块42与bim系统交互。
52.请参阅图2和图6,u形支座2一侧的外壁上安装有第一步进电机4,第一步进电机4的输出端贯穿并延伸至u形支座2的内部,且安装有主动齿轮18,主动齿轮18的上端安装有从动齿轮17,安防机构3的两侧均安装有转轴16,且安防机构3一侧的转轴16与从动齿轮17固定连接,安防机构3另一侧的转轴16与u形支座2的连接处安装有轴承19,u形支座2的下端安装有涡轮台20,且涡轮台20设置在动力台1的内部,涡轮台20的外壁上安装有涡轮21,涡轮21的一侧安装有蜗杆22,蜗杆22的一端安装有支架23,蜗杆22的另一端安装有第二步进电机24,中央处理器41的输出端通过电机驱动模块46与第一步进电机4和第二步进电机24的输入端电性连接,第一步进电机4可通过齿轮啮合传动作用带动安防机构3上下偏转,而第二步进电机24可通过涡轮21蜗杆22传动带动安防机构3左右偏转,大幅提高图像采集范围。
53.请参阅图3,驱动柜6内部的一侧安装有电源模块35,驱动柜6内部的另一侧安装有气泵25,电源模块35与气泵25之间安装有隔板36,气泵25的进气口处安装有进气管33,且进气管33的一端延伸至驱动柜6的外部,进气管33的内部安装有活性炭过滤筒34,气泵25的出气口处安装有出气管26,出气管26的一端安装有电动三通阀27,电动三通阀27的外壁上安装有三通阀电机271,电动三通阀27的第一接头处安装有涡流管制冷器28,涡流管制冷器28的下方安装有热气流管30,且热气流管30的一端贯穿并延伸至驱动柜6的外部,涡流管制冷器28的一侧安装有冷气流管29,u形支座2底面的上端安装有喷嘴15,喷嘴15通过导气管14与冷气流管29相连通,气泵25的输入端与中央处理器41的输出端电性连接,当环境温较高,红外感温探头303检测温度无明显变化时,中央处理器41会发送信号至气泵25,由气泵25将外部空气低压导入涡流管制冷器28,外部空气通过涡流管内涡流腔的能量转换,一端产生热空气从热气流管30排出装置外部,另一端则产生冷空气经由冷气流管29以及导气管14进入喷嘴15,有喷嘴15将冷空气喷吹至安防机构3,经由散热风扇37引导高效带走内部热量,保证安防机构3长效运行。
54.请参阅图3,电动三通阀27的第二接头处安装有绕流管31,且绕流管31的一端与冷气流管29相连通,冷气流管29的内部安装有止逆阀32,止逆阀32能够避免气体回流的情况
发生。
55.请参阅图1-6,一种基于物联网的安防装置的工作方法,包括以下步骤:
56.步骤一:由bim系统完成施工建筑的预制模型,根据预制模型确定合适的安防装置布设点,由物联网将位置信息反馈至多个安防装置;
57.步骤二:由施工人员根据安防装置内置的gps定位模块43,结合bim系统反馈的位置信息,将安防装置推行至布设点位;
58.步骤三:架设完毕后,由安防装置内的中央处理器41驱动电机驱动模块46运行,利用第一步进电机4和第二步进电机24带动安防机构3上下左右偏转,由图像采集模块301全面采集施工图像,安防机构3内置光学映射模块45,通过光学映射和数学计算可得出真实坐标点信息,完毕后通过无线数传模块42将图像以及坐标信息上传至物联网终端;
59.步骤四:物联网终端在接收到施工图像和坐标信息后,进一步将其反馈至图像处理系统,图像处理系统内置opencv,可对图像中建筑结构的角点以及边缘位置进行捕捉,建立半稠密点云图,之后反馈至物联网终端,物联网通过特征匹配和坐标对其的方式,将获取的半稠密点云图与bim系统中虚拟模型比对,确认实际施工与模型设计不一致之处,及时做出调整和记录;
60.步骤五:安防机构3运行过程中,后端的红外感温探头303实时检测内部温度,当温度较高时,首先由安防机构3后端的散热风扇37排出内部热量,安防机构3外壳采用框架套筒307与无纺布层308相结合制成,透风性强,保证了散热效果,当环境温较高,红外感温探头303检测温度无明显变化时,中央处理器41会发送信号至气泵25,由气泵25将外部空气低压导入涡流管制冷器28,外部空气通过涡流管内涡流腔的能量转换,一端产生热空气从热气流管30排出装置外部,另一端则产生冷空气经由冷气流管29以及导气管14进入喷嘴15,有喷嘴15将冷空气喷吹至安防机构3,经由散热风扇37引导高效带走内部热量,保证安防机构3长效运行;
61.步骤六:拍摄图像过程中,若图像处理系统判断图像信息颗粒较多,即代表安防机构3的uv保护镜304表面沾染粉尘较多,此时由中央处理器41发送信号至电机驱动模块46,利用第一步进电机4带动安防机构3的uv保护镜304朝向下方的喷嘴15,此时三通阀电机271驱动,带动电动三通阀27换路,由气泵25将外部空气高压导入绕流管31,经由导气管14将气体导入喷嘴15,高压喷射至uv保护镜304表面,除尘后,安防机构3复位,继续进行拍摄,以保证图像采集效果。
62.对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1