交互式车辆移动确定的制作方法
1.本公开涉及交互式车辆移动确定。
背景技术:
2.可以在提供服务期间以涉及目标车辆在移动空间中的移动的方式提供各种类型的车辆服务。特定车辆的适当移动可以由诸如正在执行的服务过程的阶段的定时、移动空间的几何形状以及服务过程中使用的部件的位置等因素来决定。移动空间中其他车辆的存在也可对所讨论的特定车辆的移动施加约束。
技术实现要素:
3.本文公开了一种用于确定车辆在车辆移动空间中时要执行的移动的系统。车辆的定位发射器发射定位信号,所述定位信号由车辆移动空间的各种定位接收器接收。基于定位接收器对定位信号的接收,可以确定车辆在车辆移动空间内的位置(例如,经由诸如到达时差(tdoa)和/或到达角(aoa)等技术)。可以在给定其位置的情况下同时也考虑移动空间中的其他车辆相对于该车辆的位置来确定车辆的适当移动。车辆可以发送信号以命令其他车辆的移动,和/或致动车辆移动空间的部件。经由这种方法,可以更快和/或更有效地移动车辆。此外,可以动态地定制操作以适应特定车辆的特定需求。
4.一种系统可包括计算机,所述计算机具有处理器和存储器,所述存储器存储可由所述处理器执行以进行以下操作的指令:从第一车辆发射车辆定位信号;接收所述第一车辆的车辆定位数据,所述车辆定位数据基于车辆移动空间的多个定位接收器对所述车辆定位信号的接收来生成;基于所述第一车辆的所述车辆定位数据来确定所述第一车辆在所述车辆移动空间中的位置;确定第二车辆在所述车辆移动空间中相对于所述第一车辆的所述位置的位置;以及基于所述第一车辆的所述位置以及所述第二车辆相对于所述第一车辆的所述位置的所述位置来命令所述第一车辆的第一移动。
5.所述存储器可存储可由所述处理器执行以基于从所述第二车辆接收的消息来命令所述第一车辆的第二移动的指令。
6.所述存储器可存储可由所述处理器执行以向所述第二车辆发送用以命令所述第二车辆的移动的消息的指令。
7.所述车辆定位信号可为超宽带(uwb)信号,并且所述多个定位接收器可为uwb锚点。
8.所述存储器可存储可由所述处理器执行以发送用以命令对所述车辆移动空间的部件的致动的信号的指令。
9.所述部件可为所述车辆移动空间的可移动部件,并且所述致动可导致所述可移动部件移动。
10.所述车辆移动空间可包括车辆运输拖车的空间,并且所述可移动部件可为所述车辆运输拖车的可移动坡道。
11.所述部件可为所述车辆移动空间的清洁部件。
12.一种方法可包括:从第一车辆发射车辆定位信号,接收所述第一车辆的车辆定位数据,所述车辆定位数据基于车辆移动空间的多个定位接收器对所述车辆定位信号的接收来生成,基于所述第一车辆的所述车辆定位数据来确定所述第一车辆在所述车辆移动空间中的位置,确定第二车辆在所述车辆移动空间中相对于所述第一车辆的所述位置的位置,以及基于所述第一车辆的所述位置以及所述第二车辆相对于所述第一车辆的所述位置的所述位置来命令所述第一车辆的第一移动。
13.所述方法可包括基于从所述第二车辆接收的消息来命令所述第一车辆的第二移动。
14.所述方法可包括向所述第二车辆发送用以命令所述第二车辆的移动的消息。
15.所述车辆定位信号可为超宽带(uwb)信号,并且所述多个定位接收器可为uwb锚点。
16.所述车辆移动空间可包括车辆运输拖车的空间,并且所述方法可包括发送用以命令对车辆运输拖车的可移动坡道的致动的信号。
17.所述车辆移动空间可包括洗车场的空间,并且所述方法可包括发送用以命令对洗车场的清洁部件的致动的信号。
18.一种系统可包括:第一车辆,所述第一车辆包括用以发射车辆定位信号的发射器;车辆移动空间的多个定位接收器,所述多个定位接收器用以接收车辆定位信号并基于对所述车辆定位信号的接收来生成第一车辆的车辆定位数据;以及计算机,所述计算机具有处理器和存储器,所述存储器存储可由所述处理器执行以进行以下操作的指令:基于所述第一车辆的所述车辆定位数据来确定所述第一车辆在所述车辆移动空间中的位置;确定第二车辆在所述车辆移动空间中相对于所述第一车辆的所述位置的位置;以及基于所述第一车辆的所述位置以及所述第二车辆相对于所述第一车辆的所述位置的所述位置来命令所述第一车辆的第一移动。
19.所述存储器可存储可由所述处理器执行以基于从所述第二车辆接收的消息来命令所述第一车辆的第二移动的指令。
20.所述存储器可存储可由所述处理器执行以向所述第二车辆发送用以命令所述第二车辆的移动的消息的指令。
21.所述车辆定位信号可为超宽带(uwb)信号,并且所述多个定位接收器可为uwb锚点。
22.所述存储器可存储可由所述处理器执行以发送用以命令对所述车辆移动空间的部件的致动的信号的指令。
23.所述车辆移动空间可包括车辆运输拖车的空间,所述部件可为所述车辆运输拖车的可移动坡道,并且所述致动可导致所述可移动坡道改变位置。
24.所述车辆移动空间可包括洗车场的空间,并且所述部件可为洗车场的清洁部件。
附图说明
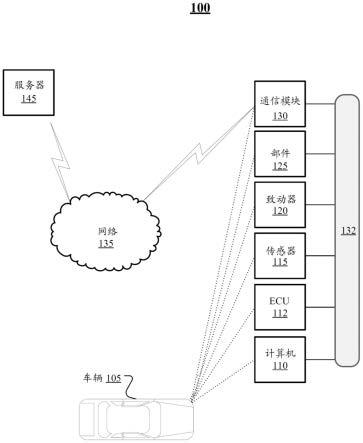
25.图1是示例性系统的框图。
26.图2是示例性服务器的框图。
27.图3是示例性车辆移动系统的框图。
28.图4是示例性计算机的框图。
29.图5示出了车辆移动系统的另外的示例性方面。
30.图6是示例性过程流的框图。
31.图7是示例性存储介质的框图。
具体实施方式
32.图1是示例性车辆系统100的框图。系统100包括车辆105,所述车辆是陆地车辆,诸如汽车、卡车等。车辆105包括计算机110、电子控制单元(ecu)112、车辆传感器115、用于致动各种车辆部件125的致动器120、通信模块130以及车辆网络132。通信模块130允许车辆105经由网络135与服务器145通信。
33.计算机110包括处理器和存储器。存储器包括一种或多种形式的计算机可读介质,并且存储可由处理器执行的用于执行包括如本文所公开的各种操作的指令。处理器可使用任何合适的处理器或逻辑装置来实现,诸如复杂指令集计算机(cisc)微处理器、精简指令集计算(risc)微处理器、超长指令字(vliw)微处理器、x86指令集兼容处理器、实现指令集组合的处理器、多核处理器或任何其他合适的微处理器或中央处理单元(cpu)。处理器还可被实现为专用处理器,诸如控制器、微控制器、嵌入式处理器、芯片多处理器(cmp)、协处理器、图形处理器、图形处理单元(gpu)、数字信号处理器(dsp)、网络处理器、媒体处理器、输入/输出(i/o)处理器、媒体访问控制(mac)处理器、无线电基带处理器、专用集成电路(asic)、现场可编程门阵列(fpga)、可编程逻辑装置(pld)等。在一些实现方式中,计算机110可包括多个处理器,每个处理器可根据上述示例中的任一者来实现。
34.计算机110可以自主、半自主模式或非自主(手动)模式操作车辆105,即,可控制和/或监测车辆105的操作,包括控制和/或监测部件125。出于本公开的目的,自主模式被定义为其中车辆推进、制动和转向中的每一者都由计算机110控制的模式;在半自主模式下,计算机110控制车辆推进、制动和转向中的一者或两者;在非自主模式下,人类操作员控制车辆推进、制动和转向中的每一者。
35.计算机110可包括编程以操作车辆制动、推进(例如,通过控制内燃发动机、电动马达、混合发动机等中的一者或多者来控制车辆的加速)、转向、气候控制、内部灯和/或外部灯等中的一者或多者,以及确定计算机110(而非人类操作员)是否以及何时控制此类操作。另外,计算机110可被编程为确定人类操作员是否以及何时控制此类操作。
36.计算机110可例如经由如下文进一步描述的车辆网络132通信地耦合到位于包括在车辆105中的其他装置中的一个或多个处理器。此外,计算机110可经由通信模块130与使用全球定位系统(gps)的导航系统进行通信。作为示例,计算机110可请求并接收车辆105的位置数据。所述位置数据可为常规格式,例如地理坐标(纬度坐标和经度坐标)。
37.ecu 112(其还可称为电子控制模块(ecm)或简称为“控制模块”)是监测和/或控制车辆105的各种车辆部件125的计算装置。ecu 112的示例可包括发动机控制模块、变速器控制模块、动力传动系统控制模块、制动控制模块、转向控制模块等。任何给定的ecu 112都可包括处理器和存储器。存储器可包括一种或多种形式的计算机可读介质,并且可存储可由处理器执行以用于执行包括如本文所公开的各种操作的指令。任何给定ecu 112的处理器
均可使用通用处理器或专用处理器或处理电路来实现,包括上文参考包括在计算机110中的处理器识别的任何示例。
38.在一些实现方式中,给定ecu 112的处理器可使用微控制器来实现。在一些实现方式中,给定ecu 112的处理器可使用专用电子电路来实现,所述专用电子电路包括针对特定操作而制造的asic,例如,用于处理传感器数据和/或传送传感器数据的asic。在一些实现方式中,给定ecu 112的处理器可使用fpga来实现,所述fpga是被制造为可由乘员配置的集成电路。通常,在电子设计自动化中使用诸如vhdl(超高速集成电路硬件描述语言)的硬件描述语言来描述诸如fpga和asic的数字和混合信号系统。例如,asic是基于制造前提供的vhdl编程而制造的,而fpga内部的逻辑部件可基于例如存储在电连接到fpga电路的存储器中的vhdl编程而配置。在一些示例中,通用处理器、asic和/或fpga电路的组合可包括在给定ecu 112中。
39.车辆网络132是可在车辆105中的各种装置之间交换消息所经由的网络。计算机110一般可被编程为经由车辆网络132向和/或从车辆105中的其他装置(例如,ecu 112、传感器115、致动器120、部件125、通信模块130、人机界面(hmi)等中的任一者或全部)发送和/或接收消息。另外地或替代地,可经由车辆网络132在车辆105中的各种此类其他装置之间交换消息。在计算机110实际上包括多个装置的情况下,车辆网络132可用于在本公开中表示为计算机110的装置之间的通信。此外,如以下所提及,各种控制器和/或车辆传感器115可向计算机110提供数据。
40.在一些实现方式中,车辆网络132可以是其中经由车辆通信总线传达消息的网络。例如,车辆网络可包括其中经由can总线传达消息的控制器局域网(can),或者其中经由lin总线传达消息的局域互连网(lin)。
41.在一些实现方式中,车辆网络132可包括其中使用其他有线通信技术和/或无线通信技术(例如,以太网、wifi、蓝牙等)传达消息的网络。在一些实现方式中,可用于通过车辆网络132进行通信的协议的其他示例包括但不限于面向媒体的系统传输(most)、时间触发协议(ttp)和flexray。
42.在一些实现方式中,车辆网络132可表示支持车辆105中装置之间通信的可能是不同类型的多个网络的组合。例如,车辆网络132可包括:can,其中车辆105中的一些装置经由can总线进行通信;以及有线或无线局域网,其中车辆105中的一些装置根据以太网或wi-fi通信协议进行通信。
43.车辆传感器115可包括诸如已知的用于向计算机110提供数据的多种装置。例如,车辆传感器115可包括设置在车辆105的顶部上、在车辆105的前挡风玻璃后面、在车辆105周围等的光探测和测距(激光雷达)传感器115等,所述传感器提供车辆105周围的对象的相对位置、大小和形状和/或周围的情况。作为另一示例,固定到车辆105保险杠的一个或多个雷达传感器115可提供数据以提供对象(可能包括第二车辆)等相对于车辆105的位置的速度并进行测距。车辆传感器115还可包括相机传感器115(例如,前视、侧视、后视等),所述相机传感器提供来自车辆105的内部和/或外部的视野的图像。
44.致动器120经由可根据如已知的适当控制信号来致动各种车辆子系统的电路、芯片、马达或其他电子和/或机械部件来实现。致动器120可用于控制部件125,包括车辆105的制动、加速和转向。
45.在本公开的背景中,车辆部件125是适于执行机械或机电功能或操作(诸如使车辆105移动、使车辆105减速或停止、使车辆105转向等)的一个或多个硬件部件。部件125的非限制性示例包括推进部件(其包括例如内燃发动机和/或电动马达等)、变速器部件、转向部件(例如,其可包括方向盘、转向齿条等中的一者或多者)、制动部件(如以下所描述)、停车辅助部件、自适应巡航控制部件、自适应转向部件、可移动座椅等。
46.此外,计算机110可被配置用于经由通信模块130与车辆105外部的装置通信,例如,通过车辆对车辆(v2v)或车辆对基础设施(v2i)无线通信与另一车辆、远程服务器145(通常经由网络135)通信。通信模块130可包括计算机110可借以通信的一个或多个机制,包括无线(例如,蜂窝、无线、卫星、微波和射频)通信机制的任何期望组合以及任何期望网络拓扑(或者当利用多个通信机制时的多个拓扑)。经由通信模块130提供的示例性通信包括提供数据通信服务的蜂窝、ieee 802.11、专用短程通信(dsrc)和/或包括互联网的广域网(wan)。
47.网络135可以是各种有线或无线通信机制中的一者或多者,包括有线(例如,电缆和光纤)和/或无线(例如,蜂窝、无线、卫星、微波和射频)通信机制的任何期望的组合以及任何期望的网络拓扑(或当利用多种通信机制时为多个拓扑)。示例性通信网络包括提供数据通信服务的无线通信网络(例如,使用蓝牙、蓝牙低功耗(ble)、ieee802.11、车辆对车辆(v2v)诸如蜂窝式v2v(cv2v)、蜂窝式v2i(cv2i)等)、局域网(lan)和/或包括互联网的广域网(wan)。
48.计算机110可基本上连续地、周期性地和/或当由服务器145指示时等从传感器115接收并分析数据。此外,对象分类或识别技术可用于在例如计算机110中基于激光雷达传感器115、相机传感器115等的数据,来识别对象的类型(例如,车辆、人、岩石、坑洞、自行车、摩托车等)以及对象的物理特征。
49.图2是示例性服务器145的框图。服务器145包括计算机235和通信模块240。计算机235包括处理器和存储器。存储器包括一种或多种形式的计算机可读介质,并且存储可由计算机235执行以执行各种操作(包括如本文所公开的操作)的指令。通信模块240可包括用于有线和/或无线通信(例如,使用合适协议的射频通信)的常规机制,所述常规机制允许计算机235经由无线和/或有线通信网络/链路与其他装置(诸如车辆105)通信。
50.图3是示例性车辆移动系统300的框图。车辆移动系统300是用于提供车辆105的移动的系统,通常在为车辆(诸如图1的车辆105)提供一种或多种类型的服务的系统或结构的上下文中。可以实现车辆移动系统300的服务系统的示例可以包括但不限于车辆清洁/清洗、车辆维修、车辆运输和车辆、存放。车辆移动系统300包括下面参考图5详细讨论的各种部件302。
51.车辆移动系统300可以控制或引导车辆在车辆服务空间304内的移动。车辆服务空间304是车辆(例如,车辆105)在由包括车辆移动系统300的系统或结构提供服务时所在的三维空间。车辆服务空间304的性质可以根据所提供的服务类型而变化。在一些实现方式中,车辆移动系统300可以是提供车辆清洁/清洗服务的洗车场,并且车辆服务空间304可以是车辆在被车辆移动系统300清洁/清洗时穿过的空间。在一些实现方式中,车辆移动系统300可以是提供车辆运输服务的车辆运输拖车,并且车辆服务空间304可以是被车辆运输拖车运输的车辆占用(或可占用)的空间。
52.车辆105可以在车辆服务空间304内移动。该移动的性质可以根据所提供的服务类型而变化。例如,如果车辆移动系统300在提供车辆清洁/清洗服务的洗车场中实施,则车辆105在车辆服务空间304内的移动可以采取沿着地面或地板表面的向前运动的形式。在另一个示例中,如果车辆移动系统300在提供车辆运输服务的车辆运输拖车中实施,则车辆105在车辆服务空间304内的移动可以涉及沿着车辆运输拖车的斜坡和/或轨道(其可以是可移动的)的运动。这种运动可以包括前进运动和后退运动两者,并且可以包括向上分量和向下分量(例如,运动上坡/下坡)。
53.车辆服务管理器306可以管理车辆105的控制或移动方向。车辆服务管理器306可以包括在一个或多个计算机上可执行的编程。在一些实现方式中,车辆服务管理器306可以是管理对车辆服务空间304中的多个(例如,所有)车辆105的服务提供的集中式管理器。在一些此类实现方式中,车辆服务管理器306可以包括在车辆移动系统300的计算机(图3中未示出)上执行的编程。在一些其他实现方式中,车辆服务管理器306可以是用于车辆105的专用管理器,并且可以管理对特定车辆105的服务提供,例如,车辆服务管理器306可以包括在车辆105的计算机110上执行的编程。
54.在一些实现方式中,人类操作员可以使用中间装置(诸如移动通信装置)对车辆105的移动施加控制,所述中间装置可以与车辆服务管理器306和车辆105通信和协调。在一些实现方式中,操作可以使用在中间装置上执行的客户端应用程序来控制车辆105的移动,并且可以通过在中间装置处输入命令/输入来手动地控制车辆105的移动。在其中在提供车辆运输服务的车辆运输拖车中实施车辆移动系统300的示例性实现方式中,操作员可以使用在移动装置上执行的客户端应用程序来将车辆手动地推进到所述车辆运输拖车的坡道和/或轨道上/从所述车辆运输拖车的坡道和/或轨道手动地收回车辆。
55.图4是根据一些实现方式的可以执行车辆服务管理器306的编程的计算机400的框图。根据一些实现方式,计算机400可以对应于车辆105中的计算机110。根据其他实现方式,计算机400可以对应于图3的车辆移动系统300的计算机。
56.如图4所示,计算机400可以包括处理器408和存储器410。存储器410包括一种或多种形式的计算机可读介质,并且存储可由处理器执行的用于执行包括如本文所公开的各种操作的指令。处理器408可使用任何合适的处理器或逻辑装置来实现,诸如复杂指令集计算机(cisc)微处理器、精简指令集计算(risc)微处理器、超长指令字(vliw)微处理器、x86指令集兼容处理器、实现指令集组合的处理器、多核处理器或任何其他合适的微处理器或中央处理单元(cpu)。处理器408还可被实现为专用处理器,诸如控制器、微控制器、嵌入式处理器、芯片多处理器(cmp)、协处理器、图形处理器、图形处理单元(gpu)、数字信号处理器(dsp)、网络处理器、媒体处理器、输入/输出(i/o)处理器、媒体访问控制(mac)处理器、无线电基带处理器、专用集成电路(asic)、现场可编程门阵列(fpga)、可编程逻辑装置(pld)等。在一些实现方式中,装置300可包括多个处理器(包括处理器302),每个处理器可根据上述示例中的任一者来实现。
57.图5示出了根据各种实现方式的车辆移动系统300的附加方面。如图5所示,车辆移动系统300的部件302可以包括结构部件512、主动部件514、定位部件516和通信部件518。
58.结构部件512是包括在车辆移动系统300中的物理结构的元件。结构部件512可以包括围绕、包围、跨越、位于下方或覆盖车辆服务空间304的结构元件,诸如墙壁、天花板、地
板、车辆轨道和坡道。结构部件512可以另外包括用于此类结构元件的支撑结构,诸如支撑柱、桁架、框架等。结构部件512可以包括可致动结构部件513。可致动结构部件513是可以被致动以使它们移动的结构部件512。例如,在车辆移动系统300是车辆运输拖车的一些实现方式中,可致动结构部件513可以包括可移动车辆坡道。
59.主动部件514是非结构部件,其在被致动时可以执行与向车辆服务空间304中的车辆提供服务相关联的功能。在一些实现方式中,主动部件514可以包括清洁部件。例如,在车辆移动系统300是洗车场的一些实现方式中,主动部件514可以包括在洗车场中将水、肥皂或蜡喷洒到车辆上或者在洗车场中对车辆进行擦洗、冲洗、干燥(例如,通过吹热空气或以其他方式施加热量,或者通过擦拭车辆上的水)、抛光或擦亮的清洁部件。一些主动部件514可以结合执行其相关联的功能来移动。例如,主动部件514可以是在车辆服务空间304中擦洗车辆时旋转的旋转鼓式洗涤器,并且可以安装在枢转支撑臂上,所述枢转支撑臂在被致动时枢转以将旋转鼓式洗涤器移动到适当位置来进行擦洗。
60.定位部件516是发射和/或接收用于车辆服务空间304中的车辆定位的信号的部件。在一些实现方式中,定位部件516可以包括支持超宽带(uwb)定位的部件,诸如uwb锚点和/或uwb标签。在一些实现方式中,定位部件516可以替代地或另外包括支持其他定位技术(诸如蓝牙或蓝牙低功耗(le)定位)的部件。在一些实现方式中,可以使用双向测距来进行车辆在车辆服务空间304中的定位。在一些实现方式中,到达时差(tdoa)和/或到达角(aoa)方法可以结合车辆服务空间304中的车辆定位来应用。
61.通信部件518是向车辆服务空间304中的车辆发射消息和/或从所述车辆接收消息的部件。通信部件518可以包括一个或多个射频(rf)发射器、接收器和/或收发器,并且可以根据任何合适的无线通信协议(诸如蓝牙、蓝牙低功耗(ble)、ieee 802.11/wifi、无线广域网(wwan)/蜂窝协议(诸如3gpp蜂窝无线电接入网络协议)、车辆对车辆(v2v)(诸如蜂窝v2v(cv2v)、蜂窝v2i(cv2i)等))来发射和/或接收消息。
62.返回到图3,在一些实现方式中,车辆105可以(例如,通过车辆105的定位发射器)发射车辆定位信号,所述车辆定位信号可以由车辆移动系统300的各种车辆定位接收器接收。基于接收到车辆定位信号,车辆服务管理器306可以确定车辆105在车辆服务空间304中的位置。该确定可以使用例如双向测距、tdoa和/或aoa技术来执行。
63.可以感测另一车辆350在车辆服务空间304中相对于车辆105的位置。在一些实现方式中,可以经由车辆定位信号的发射和接收和/或与确定车辆105在车辆服务空间304中的位置相同或类似的方法来进行这种感测。例如,车辆350中的定位接收器可以接收由车辆105发射的定位信号,并且车辆350确定其相对于车辆105的位置并向车辆105发送数据以报告该相对位置。在一些实现方式中,可以经由不同的程序来实现对车辆350相对于车辆105的位置的感测,诸如例如通过分析分别由车辆105的雷达传感器和相机提供的雷达回波和捕获的图像数据。
64.基于车辆105在车辆服务空间304中的位置和车辆350相对于车辆105的位置,可以命令车辆105的移动。例如,在车辆移动系统是洗车场的一些实现方式中,可以基于确定车辆105位于洗车场的“冲洗区”的阈值处并且引导车辆(例如,车辆350)已经离开所述冲洗区而命令车辆105移动到所述冲洗区中。
65.在一些实现方式中,车辆105可以结合确定/控制其在车辆服务空间304中的运动
(和/或其他车辆的运动)来与车辆服务空间304中的其他车辆(例如,车辆350)通信。在一些实现方式中,例如,车辆105的计算机110可以基于从诸如车辆350的另一车辆接收的消息来命令车辆105的移动。在车辆移动系统300是洗车场的示例性实现方式中,计算机110可以响应于从车辆350接收到指示车辆350已经离开冲洗区的消息而命令车辆105向前移动到冲洗区中。
66.在一些实现方式中,第一车辆105可以向车辆服务空间304中的第二车辆(例如,车辆350)发送消息以命令第二车辆的移动。例如,在车辆移动系统300是车辆运输拖车的示例性实现方式中,车辆105可以将其目的地识别为车辆350后面的在车辆运输拖车的特定轨道/层上的位置。基于确定车辆350未定位得向前足够远以使得车辆105能够适当地定位自身(例如,与在运输期间将车辆105固定到拖车所需的约束特征适当地对准),车辆105可以向车辆350发送消息以命令车辆350向前移动。
67.在一些实现方式中,车辆105可以与车辆服务管理器306通信以命令对车辆移动系统300的部件的致动。在车辆移动系统300是车辆运输拖车的示例性实现方式中,车辆105可以向车辆服务管理器306发送消息以命令对车辆运输拖车的可移动坡道的致动(例如,以使车辆105能够移动到期望位置)。在车辆移动系统300是洗车场的示例性实现方式中,车辆105可以向车辆服务管理器306发送消息以命令对用于进行擦洗、冲洗、干燥、抛光或擦亮,或者用于施加水、肥皂或蜡的部件的致动。
68.图6是过程流600的框图,其可以表示在各种实现方式中执行的操作。如过程流600中所示,在602处,可以从车辆移动系统的车辆服务空间中的第一车辆发射车辆定位信号。例如,当车辆105在图3的车辆服务空间304中时,车辆105的定位发射器可以发射车辆定位信号。在604处,可以访问车辆定位数据,所述车辆定位数据是基于车辆移动系统的多个定位接收器对在602处发射的车辆定位信号的接收而生成的。例如,车辆105的计算机110可以访问基于车辆移动系统300的多个定位接收器对从车辆105发射的车辆定位信号的接收而生成的车辆定位数据。
69.在606处,可以基于在604处访问的车辆定位数据来确定第一车辆在车辆服务空间中的位置。例如,车辆105的计算机110可以基于在604处访问的车辆定位数据来确定车辆105在车辆移动系统300的车辆服务空间304内的位置。在608处,可以确定第二车辆在车辆服务空间内相对于第一车辆的位置的位置。例如,可以确定车辆350在图3的车辆服务空间304中相对于车辆105的位置。在610处,可以基于第一车辆在车辆服务空间内的位置和第二车辆相对于第一车辆的位置的位置来命令第一车辆的移动。例如,计算机110可以基于车辆105在车辆服务空间304中的位置和车辆350相对于车辆105的位置的位置来命令车辆105的移动。
70.图7示出了示例性存储介质700。存储介质700可以是任何非暂时性计算机可读存储介质或机器可读存储介质,诸如光学、磁性或半导体存储介质。在各种实现方式中,存储介质700可以是制品。在一些实现方式中,存储介质700可以存储计算机可执行指令,诸如用于实现过程流600的计算机可执行指令。计算机可读存储介质或机器可读存储介质的示例可以包括能够存储电子数据的任何有形介质,包括易失性存储器或非易失性存储器、可移除或不可移除存储器、可擦除或不可擦除存储器、可写或可重写存储器等。计算机可执行指令的示例可包括任何合适类型的代码,诸如源代码、编译代码、解释代码、可执行代码、静态
代码、动态代码、面向对象的代码、可视化代码等。
71.如本文所使用的,术语"电路"可指专用集成电路(asic)、电子电路、处理器(共享、专用或群组)和/或存储器(共享、专用或群组)、或是其一部分、或包括其在内,执行一个或多个软件或固件程序、组合逻辑电路和/或提供所描述的功能的其他合适的硬件部件。在一些实现方式中,电路可在一个或多个软件或固件模块中实现,或者与电路相关的功能可由一个或多个软件或固件模块实现。在一些实现方式中,电路可包括至少部分地可在硬件中操作的逻辑。
72.如本文所使用,副词“基本上”是指形状、结构、测量结果、数量、时间等可能会由于材料、机械加工、制造等方面的缺陷而偏离确切描述的几何形状、距离、测量结果、数量、时间等。
73.在附图中,相同的附图标记指示相同的元素。另外,可改变这些元素中的一些或全部。关于本文所描述的介质、过程、系统、方法等,应理解,尽管已经将此类过程等的步骤描述为按照某个有序序列发生,但是此类过程可通过以不同于本文描述的顺序的顺序执行所描述的步骤来实践。还应理解,可同时执行某些步骤,可添加其他步骤,或者可省略本文所述的某些步骤。换句话说,本文对过程的描述是出于说明某些实施例的目的而提供的,并且决不应解释为限制所要求保护的发明。
74.已经以说明性方式描述了本公开,并且应理解,已经使用的术语意图具有描述性词语而非限制性词语的性质。鉴于以上教导,本公开的许多修改和变化是可能的,并且本公开可以不同于具体描述的其他方式来实践。本发明意图仅受所附权利要求的限制。
75.根据本发明,提供了一种系统,其具有:计算机,所述计算机具有处理器和存储器,所述存储器存储可由所述处理器执行以进行以下操作的指令:从第一车辆发射车辆定位信号;接收所述第一车辆的车辆定位数据,所述车辆定位数据基于车辆移动空间的多个定位接收器对所述车辆定位信号的接收;基于所述第一车辆的所述车辆定位数据来确定所述第一车辆在所述车辆移动空间中的位置;确定第二车辆在所述车辆移动空间中相对于所述第一车辆的所述位置的位置;以及基于所述第一车辆的所述位置以及所述第二车辆相对于所述第一车辆的所述位置的所述位置来命令所述第一车辆的第一移动。
76.根据一个实施例,所述存储器存储可由所述处理器执行以基于从所述第二车辆接收的消息来命令所述第一车辆的第二移动的指令。
77.根据一个实施例,所述存储器存储可由所述处理器执行以向所述第二车辆发送用以命令所述第二车辆的移动的消息的指令。
78.根据一个实施例,所述车辆定位信号为超宽带(uwb)信号,并且所述多个定位接收器为uwb锚点。
79.根据一个实施例,所述存储器存储可由所述处理器执行以发送用以命令对所述车辆移动空间的部件的致动的信号的指令。
80.根据一个实施例,所述部件是所述车辆移动空间的可移动部件,并且所述致动导致所述可移动部件移动。
81.根据一个实施例,所述车辆移动空间包括车辆运输拖车的空间,并且所述可移动部件是所述车辆运输拖车的可移动坡道。
82.根据一个实施例,所述部件为所述车辆移动空间的清洁部件。
83.根据本发明,一种方法包括:从第一车辆发射车辆定位信号;接收所述第一车辆的车辆定位数据,所述车辆定位数据基于车辆移动空间的多个定位接收器对所述车辆定位信号的接收;基于所述第一车辆的所述车辆定位数据来确定所述第一车辆在所述车辆移动空间中的位置;确定第二车辆在所述车辆移动空间中相对于所述第一车辆的所述位置的位置;以及基于所述第一车辆的所述位置以及所述第二车辆相对于所述第一车辆的所述位置的所述位置来命令所述第一车辆的第一移动。
84.在本发明的一个方面,所述方法包括基于从所述第二车辆接收的消息来命令所述第一车辆的第二移动。
85.在本发明的一个方面,所述方法包括向所述第二车辆发送用以命令所述第二车辆的移动的消息。
86.在本发明的一个方面,所述车辆定位信号为超宽带(uwb)信号,并且所述多个定位接收器为uwb锚点。
87.在本发明的一个方面,所述车辆移动空间包括车辆运输拖车的空间,所述方法包括发送用以命令对车辆运输拖车的可移动坡道的致动的信号。
88.根据本发明,提供了一种系统,其具有:第一车辆,所述第一车辆包括用以发射车辆定位信号的发射器;车辆移动空间的多个定位接收器,所述多个定位接收器用以接收车辆定位信号并基于对所述车辆定位信号的接收来生成第一车辆的车辆定位数据;以及计算机,所述计算机具有处理器和存储器,所述存储器存储可由所述处理器执行以进行以下操作的指令:基于所述第一车辆的所述车辆定位数据来确定所述第一车辆在所述车辆移动空间中的位置;确定第二车辆在所述车辆移动空间中相对于所述第一车辆的所述位置的位置;以及基于所述第一车辆的所述位置以及所述第二车辆相对于所述第一车辆的所述位置的所述位置来命令所述第一车辆的第一移动。
89.根据一个实施例,所述存储器存储可由所述处理器执行以基于从所述第二车辆接收的消息来命令所述第一车辆的第二移动的指令。
90.根据一个实施例,所述存储器存储可由所述处理器执行以向所述第二车辆发送用以命令所述第二车辆的移动的消息的指令。
91.根据一个实施例,所述车辆定位信号为超宽带(uwb)信号,并且所述多个定位接收器为uwb锚点。
92.根据一个实施例,所述存储器存储可由所述处理器执行以发送用以命令对所述车辆移动空间的部件的致动的信号的指令。
93.根据一个实施例,所述车辆移动空间包括车辆运输拖车的空间,所述部件为所述车辆运输拖车的可移动坡道,并且所述致动导致所述可移动坡道改变位置。
94.根据一个实施例,所述车辆移动空间包括洗车场的空间,并且所述部件为洗车场的清洁部件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1