基于6G可见光通信的终端位姿与时变信道联合估计方法
基于6g可见光通信的终端位姿与时变信道联合估计方法
技术领域
1.本发明涉及可见光通信的技术领域,更具体地,涉及一种基于6g可见光通信的终端位姿与时变信道联合估计方法。
背景技术:
2.可见光通信(vlc,也称为lifi)是6g短距离通信的重要补充,被设想为6g无线通信的一项重要技术,以提高室内通信质量。在可见光通信系统中,发光二极管(led)是信号光源,可见光波是通信载体,自由空间是传输通道。可见光通信由于led本身的带宽、低能耗、低价格等特性,具有高速率、低成本、环保等诸多优点。可见光通信适用于许多室内场景,如医疗保健设施、机场和火车站、工厂和物流、购物中心和其他室内公共场所。然而,可见光传输的基础是准确获取用户终端的位置和方位,vlc对距离和角度的敏感性很高,因此,必须考虑基于可见光的同时位置和方向估计(spo)。当前对于spo的研究主要解决的是五维问题,即三维位置以及两维方向(方向由单位向量来表示),然而在可见光定位的应用场景中,六维定位问题是更有实践意义,可见光传输的基础是准确获取用户的位置和方位,由于传输的可靠性对用户的位置和方位很敏感,因此有必要研究基于vlc的定位(vlp)。
3.目前,已有许多关于利用各种测量信号的基于vlc的定位的研究工作,然而大部分研究是基于关于用户方向的已知先验信息,例如,假设方向垂直向上或发射机和接收机方向向量平行等。对用户方向估计的研究还存在一定的局限性。现有技术中提出了一种有效的spo算法,通过该算法来实现用户位置和方向的联合估计。但是在该研究中,接收器方向由法向量表示,实际上只有2个自由度,不能够实现三维空间中姿态的估计,与该方案相比,另一种方案考虑一个更为一般的方向表示——旋转矩阵,可以实现姿态的三个方向的估计,但是考虑的场景较为简单,且假设视距传输信道是完美信道,不存在任何衰减,信道增益只受限于接收器的位置和姿态带估计量,以及发射功率、滤光器增益等常量,但是这些假设过于理想,在实际短距离通信系统中,由于光波的散射、绕射、反射等,接收端接收到的波形实际上是多个路径波形的合成波形,这些具有随机分布幅度、相位和入射角度的多径成分被接收机天线按向量合并成幅度和相位都急剧变化的信号,使得接收信号产生衰落失真,这种有多径传播引起的衰落称为多经衰落,属于小尺度衰落,无法实现终端位姿的准确定位。
技术实现要素:
4.为解决在基于可见光通信的定位中,可见光通信信号经历小尺度衰落后为终端定位带来的干扰问题,本发明提出了一种基于6g可见光通信的终端位姿与时变信道联合估计方法,考虑视距传输中的小尺度衰减问题,实现终端位置姿态与时变信道的联合估计。
5.为了达到上述技术效果,本发明的技术方案如下:
6.一种基于6g可见光通信的终端位姿与时变信道联合估计方法,所述方法包括以下步骤:
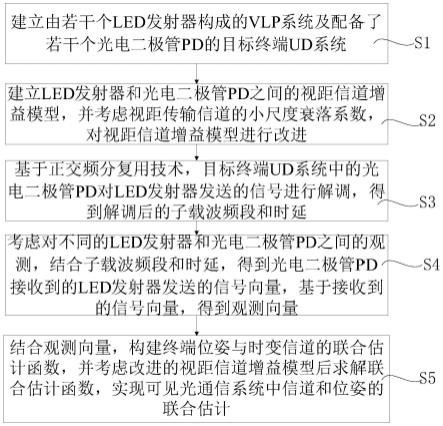
7.s1.建立由若干个led发射器构成的vlp系统及配备了若干个光电二极管pd的目标终端ud系统;
8.s2.建立led发射器和光电二极管pd之间的视距信道增益模型,并考虑视距传输信道的小尺度衰落系数,对视距信道增益模型进行改进;
9.s3.基于正交频分复用技术,目标终端ud系统中的光电二极管pd对led发射器发送的信号进行解调,得到解调后的子载波频段和时延;
10.s4.考虑对不同的led发射器和光电二极管pd之间的观测,结合子载波频段和时延,得到光电二极管pd接收到的led发射器发送的信号向量,基于接收到的信号向量,得到观测向量;
11.s5.结合观测向量,构建终端位姿与时变信道的联合估计函数,并考虑改进的视距信道增益模型后求解联合估计函数,实现可见光通信系统中信道和位姿的联合估计。
12.在本技术方案中,考虑视距传输中的小尺度衰减,基于正交频分复用技术,为不同的led发射器分配不同的频带,目标终端ud系统中的光电二极管pd对led发射器发送的信号进行解调,不同的led发射器在各自的频率载波上进行调制,构建终端位姿与时变信道的联合估计函数并求解,通过频域分集有效地估计信道,避免可见光通信信号经历小尺度衰落后为终端定位带来的干扰问题,从而实现位置姿态和信道的联合估计,提高终端定位的准确度。
13.优选地,设vlp系统中带有n
l
个led发射器,目标终端ud系统配备了n
p
个光电二极管pd,即n
l
个led发射器发射信号,n
p
个光电二极管pd接收信号,设及分别表示已知的第i个led发射器的位置和方向向量,其中,m=1,2,...,n
l
,且所有的光电二极管pd均部署在目标终端ud上,随着目标终端ud同步平移和旋转,所有光电二极管pd的相对距离和相对方向不变。
14.优选地,光电二极管pd的坐标和方向向量在目标终端ud系统所在的接收机坐标系中定义时,设接收机的质心为当前接收机坐标系的坐标原点,第j个光电二极管pd的坐标由一个相对距离向量表示,其方向由一个已知的旋转矩阵rp,j∈so(3)定义,so(3)是三维旋转群,也即是旋转矩阵所在的空间,第j个光电二极管pd相对于接收机坐标系方向n0的方向为n
p,j,0
=rp,jn0,其中,n0=[0,0,1]
t
;
[0015]
在vlp系统和目标终端ud系统整体所在的系统坐标系中,接收机的位置和方向用和r∈so(3)分别表示,其中,接收器的法线向量由n表示,即n=rn0,第j个光电二极管pd的坐标向量用rj表示,rj=r+dj,其中,dj=rd
j,0
,方向向量用nj表示,nj=rn
p,j,0
。
[0016]
优选地,令表示第m个led发射器和j个发光二极管pd之间视距传输信道的辐射向量,表达式为:
[0017][0018]
求解第m个led发射器方向矢量vm和辐射向量e
0,j,m
两者之间的角度、第j个发光二极管pd的方向向量nj和辐射向量e
0,j,m
之间的夹角,表达式分别为:
[0019][0020]
θ
0,j,m
=arccos(-e
0,j,mt
nj)
[0021]
设所有的发光二极管pd具有相同的接受信号范围所有的led发射器均具有相同的发送信号范围θ
fov
,对于第m个led和第j个pd,led发射器和光电二极管pd之间视距信道增益模型为:
[0022][0023]
其中,ψr为已知量,取决于led发射器的发射功率w
t
;考虑视距传输信道的小尺度衰落系数,改进的视距信道增益模型表示为:
[0024]h0,j,m
=α
0,j,mg0,j,m
[0025]
转化为:
[0026][0027]
其中,α
0,j,m
∈[0,1),表示第m个led发射器到j个pd视距传输信道的小尺度衰落系数,而rj=r+rd
j,0
,和nj=rn
p,j,0
,r和r表示待求的接收机的未知位置和方向。
[0028]
在此,对于第m个led发射器和第j个光电二极管pd,如果和那么判定该pd将能够接收到该led发送的los(视距)信号,其中|
·
|为绝对值。
[0029]
优选地,基于正交频分复用技术,目标终端ud系统中的光电二极管对led发射器发送信号进行解调时,每个发光二极管pd均能从不同的led发射器中分辨出不同载频的信号,对于需要传输的信息流,其前端包含led发射器的导频信号,即接收端预知的信息,串行输入后,经串并转换得到并行信号,搭载在led发射器的各个子载波上进行傅里叶逆变换,得到并行时域信号,转换为串行输出,最后通过数模转换,得到最终的发送信号ak,表示为:
[0030][0031]
其中,i=√(-1),ts为符号周期长度,接收端第j个发光二极管pd对第m个led发送信号的解调信号表示为:
[0032][0033]
其中,x
j,m
[n]为第m个led发射器发送到第j个发光二极管pd的第n个子载波上的符号,f
n,m
为第m个led的第n个子载波频段。
[0034]
优选地,第m个led的第n个子载波频段的表达式为:时延τ
j,m
为第m个led发射器到第j个发光二极管pd的飞行时间,定义为:
[0035][0036]
优选地,设表示定义接收器方向的旋转矩阵的特征参数,包括俯仰角、航向角、翻滚角,表示待求的接收器的未知位置和方向参数,即位姿信息,β和接收信号的飞行时间以及角度增益相关,对于第j个pd接收到的第m个led的信号向量:
[0037]yj,m
=g
j,m
(β)α
0,j,m
[0038]
其中,表示第j个pd接收到的来自于第m个led的信号;
[0039][0040]
表示n
×
1维的复数列矢量。当考虑不同的led和pd对的观测,接收信号表示为,
[0041]
y=g(β)h
[0042]
其中,
[0043][0044][0045][0046]
基于接收到的信号向量,得到观测向量:
[0047]
z=g(β)h+∈
[0048]
其中,为测量噪声向量,设噪声服从零均值复高斯分布,即为它的协方差矩阵。
[0049]
优选地,结合观测向量,构建终端位姿与时变信道的联合估计函数表示为:
[0050][0051]
其中,g(β)为关于β和待估计变量h的非线性函数,相对于β和h是非凸的,r非一个任意的3
×
3矩阵。
[0052]
优选地,考虑改进的视距信道增益模型后,求解终端位姿与时变信道的联合估计函数时,信道估计和终端位姿估计交替迭代进行,直至信道估计和位姿估计均收敛。
[0053]
优选地,求解终端位姿与时变信道的联合估计函数的具体过程为:
[0054]
s51.设初始位姿为
[0055]
s52.在t=0时,进行信道估计,估计表达式为:得到当前位姿下信道的估计,其中,表示伪逆运算,表示当前位姿,表示当前信道;
[0056]
s53.通过和得到当前位姿和信道下的下一次迭代的位姿估计;
[0057]
目标函数是关于接收器位置和方向的非凸函数,将g(β)h在当前位姿和信道下进行泰勒一阶展开:
[0058][0059]
其中,在当前位姿下的梯度,
[0060][0061][0062]
s54.重复s52和s53,直至终端位姿与时变信道的估计收敛。
[0063]
与现有技术相比,本发明技术方案的有益效果是:
[0064]
本发明提出一种基于6g可见光通信的终端位姿与时变信道联合估计方法,考虑视距传输中的小尺度衰减,基于正交频分复用技术,为不同的led发射器分配不同的频带,目标终端ud系统中的光电二极管pd对led发射器发送的信号进行解调,不同的led发射器在各自的频率载波上进行调制,构建终端位姿与时变信道的联合估计函数并求解,通过频域分集有效地估计信道,避免可见光通信信号经历小尺度衰落后为终端定位带来的干扰问题,从而实现位置姿态和信道的联合估计,提高了终端定位的准确度。
附图说明
[0065]
图1表示本发明实施例1中提出的基于6g可见光通信的终端位姿与时变信道联合估计方法的流程示意图;
[0066]
图2表示本发明实施例1中提出的接收机坐标系示意图;
[0067]
图3表示本发明实施例1中提出的系统坐标系示意图;
[0068]
图4表示本发明实施例1中提出的第m个led发射器和j个发光二极管pd之间视距传输信道示意图;
[0069]
图5表示本发明实施例2中提出的基于正交频分复用技术的led发射器端调制框图;
[0070]
图6表示本发明实施例2中提出的基于正交频分复用技术的发光二极管pd端解调框图;
[0071]
图7表示本发明实施例2中提出的正交频分复用技术下的载波分配示意图;
[0072]
图8表示本发明实施例3中提出的无噪情况下信道估计误差示意图;
[0073]
图9表示本发明实施例3中提出的无噪情况下位置估计误差示意图;
[0074]
图10表示本发明实施例3中提出的无噪情况下姿态估计误差示意图;
[0075]
图11表示本发明实施例3中提出的噪声80db情况下考虑小尺度衰落与不考虑小尺度衰落时,位置估计误差对比图;
[0076]
图12表示本发明实施例3中提出的噪声80db情况下考虑小尺度衰落与不考虑小尺度衰落时,方向估计误差对比图;
具体实施方式
[0077]
附图仅用于示例性说明,不能理解为对本专利的限制;
[0078]
为了更好地说明本实施例,附图某些部位会有省略、放大或缩小,并不代表实际尺寸;
[0079]
对于本领域技术人员来说,附图中某些公知内容说明可能省略是可以理解的。
[0080]
下面结合附图和实施例对本发明的技术方案做进一步的说明。
[0081]
附图中描述位置关系的仅用于示例性说明,不能理解为对本专利的限制;
[0082]
实施例1
[0083]
如图1所示,本实施例提出了一种基于6g可见光通信的终端位姿与时变信道联合估计方法,参见图1,该方法包括以下步骤:
[0084]
s1.建立由若干个led发射器构成的vlp系统及配备了若干个光电二极管pd的目标终端ud系统;
[0085]
s2.建立led发射器和光电二极管pd之间的视距信道增益模型,并考虑视距传输信道的小尺度衰落系数,对视距信道增益模型进行改进;
[0086]
s3.基于正交频分复用技术,目标终端ud系统中的光电二极管pd对led发射器发送的信号进行解调,得到解调后的子载波频段和时延;
[0087]
s4.考虑对不同的led发射器和光电二极管pd之间的观测,结合子载波频段和时延,得到光电二极管pd接收到的led发射器发送的信号向量,基于接收到的信号向量,得到观测向量;
[0088]
s5.结合观测向量,构建终端位姿与时变信道的联合估计函数,并考虑改进的视距信道增益模型后求解联合估计函数,实现可见光通信系统中信道和位姿的联合估计。
[0089]
整体上,本实施例是针对vlc信号传输经历小尺度衰落后为终端定位带来干扰的问题,首先考虑视距传输中的小尺度衰减,基于正交频分复用技术,为不同的led发射器分配不同的频带,目标终端ud系统中的光电二极管pd对led发射器发送的信号进行解调,不同的led发射器在各自的频率载波上进行调制,构建终端位姿与时变信道的联合估计函数并求解,通过频域分集有效地估计信道,避免可见光通信信号经历小尺度衰落后为终端定位带来的干扰问题,从而实现位置姿态和信道的联合估计,提高终端定位的准确度。
[0090]
在本实施例中,设vlp系统中带有n
l
个led发射器,目标终端ud系统配备了n
p
个光电二极管pd,即n
l
个led发射器发射信号,n
p
个光电二极管pd接收信号,设及分别表示已知的第i个led发射器的位置和方向向量,其中,m=1,2,...,n
l
,且所有的光电二极管pd均部署在目标终端ud上,随着目标终端ud同步平移和旋转,所有光电二极管pd的相对距离和相对方向不变,这样,在光电二极管pd的坐标和方向向量首先在接收机的坐标系中定义,然后转换到系统坐标系后进行定位估计。
[0091]
具体的,光电二极管pd的坐标和方向向量在目标终端ud系统所在的接收机坐标系中定义时,如图2所示,设接收机的质心为当前接收机坐标系的坐标原点,第j个光电二极管pd的坐标由一个相对距离向量表示,其方向由一个已知的旋转矩阵rp,j∈so(3)定义,so(3)是三维旋转群,也即是旋转矩阵所在的空间,第j个光电二极管pd相对于接收机坐标系方向n0的方向为n
p,j,0
=rp,jn0,其中,n0=[0,0,1]
t
。
[0092]
如图3所示,在vlp系统和目标终端ud系统整体所在的系统坐标系中,接收机的位置和方向用和r∈so(3)分别表示,其中,接收器的法线向量由n表示,即n=rn0,第j个光电二极管pd的坐标向量用rj表示,rj=r+dj,其中,dj=rd
j,0
,方向向量用nj表示,nj=rn
p,j,0
。
[0093]
参见图4所示的第m个led发射器和j个发光二极管pd之间视距传输信道,令表示第m个led发射器和j个发光二极管pd之间视距传输信道的辐射向量,表达式为:
[0094][0095]
求解第m个led发射器方向矢量vm和辐射向量e
0,j,m
两者之间的角度、第j个发光二极管pd的方向向量nj和辐射向量e
0,j,m
之间的夹角,表达式分别为:
[0096]
[0097]
θ
0,j,m
=arccos(-e
0,j,mt
nj)
[0098]
设所有的发光二极管pd具有相同的接受信号范围所有的led发射器均具有相同的发送信号范围θ
fov
,对于第m个led发射器和第j个光电二极管pd,如果和那么判定该pd将能够接收到该led发送的los(视距)信号,其中|
·
|为绝对值,对于第m个led和第j个pd,led发射器和光电二极管pd之间视距信道增益模型为:
[0099][0100]
其中,ψr为已知量,取决于led发射器的发射功率w
t
;在本实施例中,设孔径为φr,光学滤光器增益为gr,聚光器增益为γr,,θm∈[0,θ
fov
],是接收端滤光器增益的反射指标,通常gr=1,φr=1[cm2],θ
fov
=π/2。led的辐射角度通常通过lambertian模型里的lambertian序列来描述其中是led灯的半功率的半角,通常情况下,r=1。π(
·
)为矩形函数,
[0101][0102]
则考虑视距信号经历小尺度衰减,将辐射向量带入考虑视距传输信道的小尺度衰落系数,改进的视距信道增益模型表示为:
[0103]h0,j,m
=α
0,j,mg0,j,m
[0104]
转化为:
[0105][0106]
其中,α
0,j,m
∈[0,1),表示第m个led发射器到j个pd视距传输信道的小尺度衰落系数,而rj=r+rd
j,0
,和nj=rn
p,j,0
,r和r表示待求的接收机的未知位置和方向。
[0107]
此视距信道模型包括了可见光的大尺度增益(g
0,j,m
)以及信道的小尺度衰减(α
0,j,m
)。
[0108]
实施例2
[0109]
在本实施例中,如图5和图6所示,其中,基于正交频分复用技术,目标终端ud系统中的光电二极管对led发射器发送信号进行解调时,每个发光二极管pd均能从不同的led发射器中分辨出不同载频的信号,对于需要传输的信息流,其前端包含led发射器的导频信号,即接收端预知的信息,串行输入后,经串并转换得到并行信号,搭载在led发射器的各个子载波上进行傅里叶逆变换,得到并行时域信号,转换为串行输出,最后通过数模转换,为了确保传输信号是实数,发送信号需要满足厄米特对称条件,即:
[0110][0111]
所以得到最终的发送信号ak,表示为:
[0112][0113]
其中,i=√(-1),ts为符号周期长度,信号传输主要由传统可见光传输的角度增益模型决定,但是会受到小尺度衰减和时延的影响,接收端第j个发光二极管pd对第m个led发送信号的解调信号表示为:
[0114][0115]
其中,x
j,m
[n]为第m个led发射器发送到第j个发光二极管pd的第n个子载波上的符号,f
n,m
为第m个led的第n个子载波频段。子载波的分配情况参见图7,一共有n
l
个led,每个led上分配最多n个子载波,所以总共有nn
l
个子载波,第m个led的第n个子载波频段的表达式为:时延τ
j,m
为第m个led发射器到第j个发光二极管pd的飞行时间,定义为:
[0116][0117]
设表示定义接收器方向的旋转矩阵的特征参数,包括俯仰角、航向角、翻滚角,表示待求的接收器的未知位置和方向参数,即位姿信息,β和接收信号的飞行时间以及角度增益相关,对于第j个pd接收到的第m个led的信号向量:
[0118]yj,m
=g
j,m
(β)α
0,j,m
[0119]
其中,表示第j个pd接收到的来自于第m个led的信号;
[0120][0121]
表示n
×
1维的复数列矢量。当考虑不同的led和pd对的观测,接收信号表示为,
[0122]
y=g(β)h
[0123]
其中,
[0124][0125][0126][0127]
基于接收到的信号向量,得到观测向量:
[0128]
z=g(β)h+∈
[0129]
其中,为测量噪声向量,设噪声服从零均值复高斯分布,即为它的协方差矩阵。
[0130]
结合观测向量,构建终端位姿与时变信道的联合估计函数表示为:
[0131][0132]
其中,g(β)为关于β和待估计变量h的非线性函数,相对于β和h是非凸的,r非一个任意的3
×
3矩阵。
[0133]
考虑改进的视距信道增益模型后,求解终端位姿与时变信道的联合估计函数时,信道估计和终端位姿估计交替迭代进行,直至信道估计和位姿估计均收敛。
[0134]
求解终端位姿与时变信道的联合估计函数的具体过程为:
[0135]
s51.设初始位姿为
[0136]
s52.在t=0时,进行信道估计,估计表达式为:得到当前位姿下信道的估计,其中,表示伪逆运算,表示当前位姿,表示当前信道;
[0137]
s53.通过和得到当前位姿和信道下的下一次迭代的位姿估计;
[0138]
目标函数是关于接收器位置和方向的非凸函数,将g(β)h在当前位姿和信道下进行泰勒一阶展开:
[0139][0140]
其中,在当前位姿下的梯度,
[0141][0142][0143]
s54.重复s52和s53,直至终端位姿与时变信道的估计收敛。
[0144]
具体的求解过程即是同时对目标终端ud系统中的光电二极管pd的位置、方向和信道小尺度衰减联合估计,对于终端位姿与时变信道的联合估计函数,求解其的难点主要存在于g(β)中,由于g(β)为关于β的非线性函数,上述问题相对于β是非凸问题,不可以直接求解。此外,r不是一个任意的3
×
3矩阵,所以我们不能直接通过微分得到它的梯度方向。对于第一个挑战,利用高斯牛顿方法通过一个连续的近似函数来逼近原函数从而克服非凸问题。对于第二个挑战,可以通过对流形的优化来估计参数r,具体的:
[0145]
(1)信道估计,目标函数关于待估计变量h为凸函数,给定位姿β的当前估计量可以直接得到其当前最小二乘估计解。
[0146]
(2)位姿估计,对于g(β)h在当前位姿和信道下进行泰勒一阶展开,进一步结构化如下,
[0147][0148][0149][0150][0151]
在上式中,β只与g
0,j,m
(β)和相关,所以关键是确定这两个部分关于β的导数,β中的第一部分为接收器的位置向量r,可以直接在欧氏空间对其求导。β中的第二部分为接收器的位置向量r的参数γ,求取方向的梯度是本次研究难点之一。这里采取的方法是引入左无穷小扰动量exp(ω
×
),将r∈so(3)的旋转矩阵r映射到方向维度上,
通过计算切空间(旋转方向)的梯度,最终再映射回旋转矩阵所在的空间。具体计算表示如下:
[0152][0153][0154]
其中为常量。左扰动变量exp(ω
×
)∈so(3),由三维参数向量ω=[ω
x
,ωy,ωz]
t
映射而来,映射函数如下所示:
[0155][0156]
exp(
·
)表示矩阵指数函数,(
·
)
×
表示将方向向量转换成反对称矩阵形式。最终可以得到得到exp(-i2πf
n,m
τ
j,m
)关于β的导数:
[0157][0158]
其中,q
j,m
=r+rd
j,0-pm。同理也可以得到g
0,j,m
关于β的导数,
[0159][0160]
因此,给定当前位姿和信道估计下,关于β的梯度方向为
[0161][0162]
δ
β
=[δr,δ
γ
],不同于标准高斯牛顿算法,我们方向的迭代是在流行上进行的,位置和方向的迭代公式由下式给出
[0163]
[0164][0165]
其中δ为迭代步长。
[0166]
实施例3
[0167]
本实施例结合具体仿真,对本技术提出的方法进行验证说明,置led的数量为4个,天花板高度为3m,每个led的x、y坐标相隔1m。发射功率设为2.2w,信号发射范围设为π/2。接收器上的pd设置数量为4个,其中一个分布在中心,剩下三个围绕中心pd成金字塔状分布。接收器pd的接收范围为π/2,滤光器增益为1,孔径面积为1cm2。可见光中心频率设为100mhz,每个led分配的子载波数量为6个,所以一共有24个子载波频段。
[0168]
初始位置设定在真实位置的0.01噪声方差内,真实方向设定为接收器坐标系和系统坐标系x轴夹角相差30
°
,y轴、z轴重合,初始方向设定x轴存在5
°
的方差,图8表示无噪情况下信道估计误差示意图,图9和图10分别表示无噪情况下位置估计和姿态估计误差示意图,可以看到,在无噪环境下,提出的算法实现了信道和位姿的联合估计,并且可以达到10^
(-13)
级别的误差;图11和图12分别表示在不同接收端信噪比下,考虑小尺度衰落与不考虑小尺度衰落的位置估计误差对比与方向估计误差对比。由图11与图12可以看出,当存在噪声时,与不考虑小尺度的位姿估计算法对比,提出的算法可以实现良好的定位性能,然而不考虑小尺度的算法无法实现位姿准确定位。
[0169]
显然,本发明的上述实施例仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1