电路、基站、方法和记录介质与流程
电路、基站、方法和记录介质
1.本技术是申请号为201780057725.6、发明名称为“电路、基站、方法和记录介质”、国际申请日为2017年8月15日的专利申请的分案申请,其全部内容通过引用合并于此。
技术领域
2.本公开涉及电路、基站、方法和记录介质。
背景技术:
3.近年来,开展了与无人机相关的研究和开发,相关的研究和开发正在引起人们的注意。无人机是也被称为无人驾驶飞行器(uav)的小型无人驾驶飞机。依据美国国际无人机系统协会发布的经济报告,在2025年,无人机的市场规模仅在美国就约为820亿美元,并且估计将创造10万个新的就业机会。无人机能够利用目前为止的陆海空的任何手段都无法利用的空域,提供物品及信息。因此,无人机被称为空中的工业革命,并且被认为是今后的重要商业领域。
4.通常,认为无人机在进行无线通信的同时飞行。因此,可取的是开发使无人机能够进行稳定无线通信的技术。对于位置可被改变的设备所使用的无线通信,迄今为止开发了许多技术。例如,下述专利文献1公开了与高速越过各个基站的覆盖范围的飞机上的移动通信终端的越区切换(handover)相关的技术。
5.引文列表
6.专利文献
7.专利文献1:us 2016/0029370a
技术实现要素:
8.技术问题
9.然而,在上述专利文献等中提出的无线通信系统并不是在诸如无人机之类能够在三维空间中自由飞行的设备的前提下设计的。
10.因而,本公开提供一种用于能够在三维空间中自由飞行的设备的无线通信的结构。
11.问题的解决方案
12.按照本公开,提供一种电路,包括:获取单元,所述获取单元被配置成获取指示高度的测量结果的高度信息;和测量报告控制单元,所述测量报告控制单元被配置成基于由所述获取单元获取的高度信息与高度区域设定信息之间的关系,控制向基站报告包括指示从基站发送的参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
13.另外,按照本公开,提供一种基站,包括:参考信号发送单元,所述参考信号发送单元被配置成发送参考信号;和通知单元,所述通知单元被配置成向终端设备通知高度区域设定信息,所述终端设备基于指示高度的测量结果的高度信息与所述高度区域设定信息之
间的关系,控制报告包括指示所述参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
14.另外,按照本公开,提供一种方法,包括:获取指示高度的测量结果的高度信息;和通过处理器,基于获取的所述高度信息与高度区域设定信息之间的关系,控制向基站报告包括指示从基站发送的参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
15.另外,按照本公开,提供一种方法,包括:发送参考信号;和通过处理器,向终端设备通知高度区域设定信息,所述终端设备基于指示高度的测量结果的高度信息与所述高度区域设定信息之间的关系,控制报告包括指示所述参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
16.另外,按照本公开,提供一种记录有程序的记录介质,所述程序使计算机起以下作用:获取单元,所述获取单元被配置成获取指示高度的测量结果的高度信息;和测量报告控制单元,所述测量报告控制单元被配置成基于由所述获取单元获取的高度信息与高度区域设定信息之间的关系,控制向基站报告包括指示从基站发送的参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
17.另外,按照本公开,提供一种记录有程序的记录介质,所述程序使计算机起以下作用:参考信号发送单元,所述参考信号发送单元被配置成发送参考信号;和通知单元,所述通知单元被配置成向终端设备通知高度区域设定信息,所述终端设备基于指示高度的测量结果的高度信息与所述高度区域设定信息之间的关系,控制报告包括指示所述参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
18.发明的有益效果
19.按照本公开,如上所述,可提供一种用于能够在三维空间中自由飞行的设备的无线通信的结构。注意,上面说明的效果未必是限制性的。连同上述效果一起或者代替上述效果,可以实现记载在本说明书中的任何效果,或者基于本说明书可把握的其他效果。
附图说明
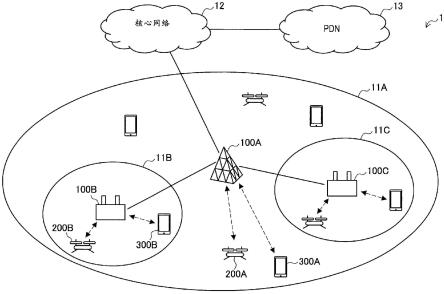
20.图1是图解说明按照本实施例的系统的配置的例子的说明图。
21.图2是图解说明对于无人机的法律限制的例子的说明图。
22.图3是图解说明通过无人机的无线通信的例子的说明图。
23.图4是图解说明通过无人机的无线通信的例子的说明图。
24.图5是图解说明通过无人机的无线通信的例子的说明图。
25.图6是图解说明通过无人机的无线通信的例子的说明图。
26.图7是图解说明在按照本实施例的系统中执行的越区切换过程的流程的例子的序列图。
27.图8是图解说明按照本实施例的基站的逻辑配置的例子的方框图。
28.图9是图解说明按照本实施例的无人机的逻辑配置的例子的方框图。
29.图10是图解说明在按照本实施例的无人机执行的测量报告处理的流程的例子的流程图。
30.图11是图解说明在按照本实施例的系统中进行的测量报告处理的流程的例子的
序列图。
31.图12是图解说明enb的示意配置的第一例子的方框图。
32.图13是图解说明enb的示意配置的第二例子的方框图。
具体实施方式
33.下面参考附图,详细说明本公开的优选实施例。注意在说明书和附图中,功能和结构基本相同的结构元件用相同的附图标记表示,这些结构元件的重复说明被省略。。
34.此外,在说明书和附图中,向相同的附图标记之后附加不同的字母,以区分基本上具有相同功能配置的元件。例如,必要时,基本具有相同功能配置的多个元件被区分成诸如基站100a,100b和100c。这里,在不必特别区分基本上具有相同功能配置的多个元件的情况下,只赋予相同的附图标记。例如,在不必特别区分基站100a,100b和100c的情况下,基站100a,100b和100c被简单地称为基站100。
35.注意,将按照以下顺序进行说明。
36.1.前言
37.1.1.无人机的用例
38.1.2.通过无人机的无线通信
39.1.3.与无人机相关的一般问题
40.1.4.系统配置例子
41.1.5.规章
42.1.6.越区切换
43.2.各个设备的配置例子
44.2.1.基站的配置例子
45.2.2.无人机的配置例子
46.3.技术特征
47.4.应用例
48.5.结论
49.《《1.前言》》
50.《1.1.无人机的用例》
51.考虑无人机的各种用例。下面,将说明代表性用例的例子。
[0052]-娱乐
[0053]
例如,考虑其中通过将相机安装在无人机上来拍摄鸟瞰照片、运动图像等的用例。近年来,已能够容易地进行诸如体育运动等的动态拍摄之类的、以前从地上拍摄困难的角度的进行拍摄。
[0054]-运输
[0055]
例如,考虑其中利用无人机运输行李的用例。已经出现开始服务引入的动向。
[0056]-公共安全
[0057]
例如,考虑诸如监视、犯人追踪之类的用例。以前,也出现了开始服务引入的动向。
[0058]-情报
[0059]
例如,考虑其中利用无人机提供信息的用例。已开展了作为起基站操作的无人机
的无人机基站的研发。通过从空中提供无线服务,无人机基站可以向难以建立因特网电路的区域提供无线服务。
[0060]-感测
[0061]
例如,考虑利用无人机进行测量的用例。由于以前由人类进行的测量现在也可以由无人机集体进行,因此能够进行高效测量。
[0062]-劳动者
[0063]
例如,考虑其中无人机被用作劳动力的用例。例如,预期在农业的各个领域中利用无人机喷洒农药或者授粉。
[0064]-维护
[0065]
例如,考虑其中利用无人机进行维护的用例。通过利用无人机,可以进行人类难以进行确认的场所(比如桥底之类)的维护。
[0066]
《1.2.通过无人机的无线通信》
[0067]
上面探讨了无人机在各种情况下的利用。为了实现这样的用例,各种技术要求被强加于无人机。在所述技术要求中,通信尤其可以被列举为重要的要求。由于无人机在三维空间中自由飞行,因此利用有线通信并不现实并且设想利用无线通信。注意作为无线通信的用途,考虑无人机的控制(即,远程操纵)、从无人机的信息提供等。
[0068]
在一些情况下,通过无人机的通信也被称为无人机到x(d2x)。d2x通信中的无人机的通信伙伴被认为是例如另外的无人机、蜂窝基站、wi-fi(注册商标)接入点、电视(tv)塔、卫星、路侧单元(road side unit,rsu)和人类(或人类携带的设备),等等。经由与人类携带的设备的设备间(d2d)通信,可以远程操纵无人机。此外,无人机也可连接到蜂窝系统或wi-fi以便通信。为了进一步扩大覆盖范围,无人机可以连接到其中利用诸如tv之类的广播系统的网络或者其中利用卫星通信的网络,以便通信。这样,考虑在无人机中形成各种通信链路。
[0069]
《1.3.与无人机相关的一般问题》
[0070]
一般,在蜂窝通信中,为了使基站设备和终端设备有效地进行无线通信,基站设备优选有效地控制无线电资源。因此,在现有技术的lte等中,终端设备向基站设备报告(即,反馈)与基站设备的传输路径的测量信息和/或终端设备状态信息。随后,基站设备基于从终端设备报告的信息来控制无线电资源。
[0071]
然而,用于在过去的蜂窝通信中进行的反馈控制的结构是在地面或建筑物中使用终端设备,即,在二维空间中使用终端设备的前提下设计的。换句话说,用于在过去的蜂窝通信中进行的反馈控制的结构可能被认为不适合于在三维空间中自由飞行的无人机。因此,理想的是为无人机扩展蜂窝通信的结构。
[0072]
《1.4.系统配置例子》
[0073]
下面将参考图1,说明按照本实施例的系统的配置的例子。
[0074]
图1是图解说明按照本实施例的系统的配置的例子的说明图。如图1中图解所示,按照本实施例的系统1包括基站100、终端设备200和终端设备300。
[0075]
基站100a是操作宏小区11a的宏小区基站。宏小区基站100a连接到核心网络12。核心网络12经由网关设备(未图示)连接到分组数据网络(pdn)13。可按照任意无线通信方案,比如长期演进(lte)、lte-advanced(lte-a)和5g之类,操作宏小区11a。注意,假定5g包括新
无线电(nr)、新无线电接入技术(nrat)和进一步演进的通用陆地无线电接入(feutra)。
[0076]
基站100b和100c是分别操作小小区11b和小小区11c的小小区基站。小小区基站100b和100c连接到宏小区基站100a。可以按照任意无线通信方案,比如lte、lte-a和5g之类,操作小小区11b和11c。
[0077]
终端设备200和300是通过连接到由基站100操作的小区来进行无线通信的设备。如图1中图解所示,终端设备200是在三维空间中自由飞行的无人机。此外,终端设备300是假定在二维平面上移动的诸如智能电话机之类的设备。在下面的说明中,为了区分终端设备200和终端设备300,终端设备200也将被称为无人机200。通过进行蜂窝通信,无人机200可在由例如蜂窝通信提供的宽广覆盖范围中实时发送和接收数据,以及接收用于自主飞行的控制。在图1中图解所示的例子中,无人机200a和终端设备300a连接到由宏小区基站100a提供的宏小区11a,无人机200b和终端设备300b连接到由小小区基站100b提供的小小区11b。
[0078]
注意,在下面的说明中,在不是特别需要区分宏小区基站100和小小区基站100的情况下,它们被统称为基站100。
[0079]
《1.5.规章》
[0080]
假设对无人机施加与飞行的高度相应的规章。
[0081]
通过利用从诸如全球导航卫星系统(gnss)、陀螺传感器和成像元件之类的多个传感器输入的信息的先进信息处理,无人机能够稳定并且自主地飞行。因此,对于预先确定的从出发地到目的地的飞行计划,无人机可以实现高度自动化的飞行,或者借助有效的远程控制的飞行。无人机可具有与各种应用相应的各种形式。例如,在无人机是直升机式无人机的情况下,无人机具有各种飞行模式。
[0082]
和诸如人所使用的智能电话机之类的现有终端设备不同,无人机具有相对于高度(例如,离地高度)的存在自由度极高的特征。此外,无人机具有在垂直方向上,它具有极高移动速度的特征。例如,考虑尽管无人机在某个时刻存在于地面上,不过在飞行开始之后,通过急速爬升仅仅数秒之后,无人机就会在空中到达数十米的高度。此外,还考虑在爬升之后,无人机终端的飞行被切换成水平飞行,并且在几十秒之后,无人机到达数百米外的地点,并且随后降低其高度以回到远程位置的地面高度。
[0083]
未来,为了确保安全,对于其位置相对于高度以极高的速度并且多样地变化的无人机,很可能会施加某些法律限制。目前,政府机构和私营企业正在提出各种法律限制。下面将参考图2说明可能的法律限制的例子。
[0084]
图2是图解说明对于无人机的法律限制的例子的说明图。图2中的x轴方向意味水平方向,并且z轴方向意味高度方向。如图2中图解所示,考虑空域可被划分成多个空域,并且对于每个划分的空域,施加法律限制。例如,可按照地上的建筑物的类型和/或高度划分空域。空域21是直到高度z1的空域,并且例如允许低速飞行。空域22是从高度z1到高度z2的空域,并且例如允许高速飞行。空域23是从高度z2到高度z3的空域,它是在诸如人口密集地和机场之类的对安全的要求高的区域上空的空域,并且例如禁止飞行本身。空域24是比高度z3更高的空域,并且例如允许经授权的无人机的飞行。
[0085]
要求无人机的使用者在遵守这种法律限制的同时,稳定并且有效地管理无人机的飞行。此外,要求蜂窝服务提供者在未来进行蜂窝通信的无人机的数量增加的情况下,也向
无人机提供稳定并且高效的通信环境。此外,对于除无人机以外的终端设备,要求蜂窝服务提供者防止服务质量的降低。
[0086]
《1.6.越区切换》
[0087]
图3是图解说明通过无人机200的无线通信的例子的说明图。图3是从水平方向看的图1中例示的宏小区11a的视图的例子,x轴方向意味水平方向,并且z轴方向意味高度方向。由于无人机200a可以高速并且广域地移动,因此,通过连接到有宏小区基站100a提供的宽宏小区11a,无人机200能够稳定地进行通信。以这种方式,对无人机200来说,与诸如wi-fi之类的其中通信距离较短的通信方式相比,其中通信距离较长的蜂窝更理想,并且特别地,与覆盖性优异的宏小区的连接是理想的。
[0088]
然而,假设通过无人机200的通信伴随着大量的数据通信,诸如飞行控制数据和无人机200拍摄的图像信息之类。因此,无人机200总是连接到宏小区以进行通信并不是所期望的。为了改善网络的频率利用效率、避免拥塞等,如果可能,那么期望的是使通信转换成通过连接到小小区进行的通信。通过运营商适当地利用小小区,可以在抑制宏小区的较昂贵资源的消耗的同时,在低高度高速地提供稳定的数据通信。宏小区和小小区之间的切换将参考图4说明。
[0089]
图4是图解说明通过无人机200的无线通信的例子的说明图。图4是从水平方向看的图1中例示的宏小区11a和小小区11b的视图的例子,x轴方向意味水平方向,并且z轴方向意味高度方向。如图4中图解所示,在无人机200b位于地面附近(即,在地面附近飞行)的情况下,期望的是无人机200b连接到由小小区基站100b提供的小小区11b。同时,在无人机200b位于较高高度的情况下,期望的是无人机200b连接到由宏小区基站100a提供的宏小区11a。通过按照这种方式切换连接目的地,能够实现小小区的接纳终端的能力的增强,和由宏小区的广域连接提供的稳定性。
[0090]
这样,就无线电资源的有效利用和无人机200的飞行稳定性而论,理想的是进行与无人机200的爬升和下降相关联的越区切换。
[0091]
这里,如上所述,假设可对无人机200施加关于飞行高度的规章。随后,假设基于规章,借助预先编程的依据所确定的飞行高度的规则的飞行计划使用无人机200。例如,假设无人机200在从地面起飞后继续爬升,并在到达预定高度区域(例如,高速飞行高度区域31)时,开始高速水平飞行。
[0092]
关于这点,在现有技术的蜂窝通信中,定义基于从基站发送的参考信号的接收信号强度的越区切换的定时。在无人机200按照类似方式基于接收信号强度进行越区切换的情况下,在基于接收信号强度的越区切换的定时与由规章定义的飞行高度的边界之间,可能产生差距。这点将参考图5和图6详细说明。
[0093]
图5是图解说明通过无人机200的无线通信的例子的说明图。图5是从水平方向看的图1中图解所示的宏小区11a和小小区11b的视图的例子,x轴方向意味水平方向,并且z轴方向意味高度方向。如图5中图解所示,可能存在其边界是利用功率定义的小小区11b的上限不与高速飞行高度区域31的下限相交的情况。这种情况下,无人机200在小小区11b的上端(例如,利用附图标记32指示的位置),越区切换到宏小区11a。随后,如果无人机200到达高速飞行高度区域31,那么无人机200在维持与宏小区11a的连接的状态下,开始高速飞行。这种情况下,无人机200的连接在开始高速飞行之前,就转换成与宏小区11a的连接。即,由
于无人机200在预先确保宽广的连接覆盖之后开始高速移动,因此不会发生特别的问题。注意,高速飞行高速带31可对应于上面参考图2说明的空域22。
[0094]
图6是图解说明利用无人机200的无线通信的例子的说明图。图6是从水平方向看的图1中图解所示的宏小区11a和小小区11b的视图的例子,x轴方向意味水平方向,并且z轴方向意味高度方向。如图6中图解所示,可能存在其边界是利用功率定义的小小区11b的上限与高速飞行高度区域31的下限相交的情况。这种情况下,存在无人机200在维持与小小区11b的连接的状态下开始高速飞行的可能性。这种情况下,无人机200试图在小小区11b的上端(例如,利用附图标记32指示的位置),越区切换到宏小区11a。此外,还可能存在无人机200在短时间内越过小小区的情况。在这样的情况下,存在无人机200在短时间内超出小小区的小区范围的可能性。
[0095]
按照对于无人机200的规章,小小区的小区半径可能被设定成足够小。然而,在这种情况下,对小小区的小区半径施加严格限制,这是不合适的。此外,识别并管理空中的小区半径的大小并不现实。
[0096]
如图6中图解所示的例子中那样,如果无人机200在短时间内飞出小小区的小区范围,那么存在由于从测量到越区切换的执行的时间延迟的影响,越区切换可能失败的可能性。为了解释这一点,首先将参考图7说明越区切换过程。
[0097]
图7是图解说明在按照本实施例的系统1中执行的越区切换过程的流程的例子的序列图。本序列涉及无人机200、小小区基站100b、宏小区基站100a和移动性管理实体(mme)12。此外,假定无人机200预先连接到小小区基站100b。
[0098]
如图7中图解所示,首先,小小区基站100b向无人机200发送测量配置消息(步骤s102)。可以作为例如无线电资源控制(rrc)连接重新配置消息而发送该测量配置消息。无人机200基于该测量配置消息和系统信息,测量从周围基站发送的参考信号(步骤s104)。随后,在预定条件被满足的情况下,无人机200把包括指示测量结果的信息的测量报告消息发送给小小区基站100b(步骤s106)。
[0099]
随后,小小区基站100b基于接收的测量报告消息,判断越区切换(步骤s108)。在判断进行越区切换的情况下,小小区基站100b向目标基站(这里,宏小区基站100a)发送越区切换请求消息(步骤s110)。随后,响应于接收到的越区切换请求消息,宏小区基站100a把ack信号发送给小小区基站100b(步骤s112)。随后,在接收到ack信号之后,小小区基站100b向无人机200发送用于指示小区的移动的rrc连接重新配置消息(步骤s114)。
[0100]
随后,无人机200进行从连接了无人机200的小小区脱离的过程(步骤s116),并与宏小区基站100a建立同步(步骤s118)。随后,宏小区基站100a向mme 12发送路径切换请求(步骤s120),并接收ack信号(步骤s122)。随后,小小区基站100b把分组数据汇聚协议(pdcp)分组数据单元(pdu)传送给宏小区基站100a。此外,无人机200向宏小区基站100a发送rrc连接重新配置完成消息(步骤s126)。
[0101]
参考上面说明的流程,在越区切换过程中,从无人机200进行测量到判断越区切换和接收到rrc连接重新配置消息之间,存在时间延迟。因此,存在连接到小小区的无人机200由于在无人机200到达一定高度的时刻突然开始高速飞行而在短时间内超出小小区的小区范围,从而无法接收rrc连接重新配置消息的可能性。结果,无人机不进行越区切换,并且结果,与无人机200已连接到的小小区基站100的连接被中断。
[0102]
如此,存在归因于基于接收信号强度的越区切换的定时与规章定义的飞行高度的边界之间的差距,无人机200可能越区切换失败并且失去连接的可能性。
[0103]
关于上面说明的情况,作为设想以三维的方式移动的移动体与地面站之间的通信的现有技术之一,存在上述专利文献1。上述专利文献1公开了一种使飞机上的终端基于飞机的三维位置信息进行越区切换的技术。然而,上述专利文献1没有研究可能施加的关于飞行高度的规章。因此,上述专利文献1没有研究基于接收信号强度的越区切换的定时与规章定义的飞行高度的边界之间的上述差距。然而,由终端预先进行测量以实现理想的越区切换是有效的,上述专利文献1没有对这点进行任何研究。此外,然而,由终端预先进行测量以实现理想的越区切换是有效的,上述专利文献1没有研究这点。
[0104]
因此,鉴于上述情况,本实施例提出一种用于在三维空间中自由飞行的无人机200的无线通信的结构,更具体地,用于实现适当的越区切换的测量报告的结构。
[0105]
《《2.各个设备的配置例子》》
[0106]
《2.1.基站的配置例子》
[0107]
图8是图解说明按照本实施例的基站100的逻辑配置的例子的方框图。如图8中图解所示,基站100包括天线单元110、无线通信单元120、网络通信单元130、存储单元140和处理单元150。
[0108]
(1)天线单元110
[0109]
天线单元110把从无线通信单元120输出的信号作为无线电波发射到空间。此外,天线单元110把空间中的无线电波转换成信号,并把所述信号输出给无线通信单元120。
[0110]
(2)无线通信单元120
[0111]
无线通信单元120发送和接收信号。例如,无线通信单元120发送给终端设备的下行链路信号,和接收来自终端设备的上行链路信号。
[0112]
(3)网络通信单元130
[0113]
网络通信单元130发送和接收信息。例如,网络通信单元130发送给其他节点的信息,和接收来自其他节点的信息。例如,上述其他节点包括其他基站和核心网络节点。
[0114]
(4)存储单元140
[0115]
存储单元140临时或永久地存储用于基站100的操作的程序和各种数据。
[0116]
(5)处理单元150
[0117]
处理单元150提供基站100的各种功能。基站100基于处理单元150的控制来操作。处理单元150包括参考信号发送单元151、通知单元153和越区切换单元155。注意,处理单元150还可包括除这些构成元件以外的构成元件。即,处理单元150能够进行除这些构成元件的操作以外的操作。参考信号发送单元151、通知单元153和越区切换单元155的功能将在后面详细说明。
[0118]
《2.2.无人机的配置例子》
[0119]
图9是图解说明按照本实施例的无人机200的逻辑配置的例子的方框图。如图9中图解所示,按照本实施例的无人机200包括天线单元210、无线通信单元220、存储单元230、飞行设备240和处理单元250。
[0120]
(1)天线单元210
[0121]
天线单元210把无线通信单元220输出的信号作为无线电波发射到空间。此外,天
线单元210把空间中的无线电波转换成信号,并把信号输出给无线通信单元220。
[0122]
(2)无线通信单元220
[0123]
无线通信单元220发送和接收信号。例如,无线通信单元220接收来自基站的下行链路信号,和发送给基站的上行链路信号。
[0124]
(3)存储单元230
[0125]
存储单元230临时或永久地存储用于终端设备200的操作的程序和各种数据。
[0126]
(4)飞行设备240
[0127]
飞行设备240是具有飞行能力,即,能够飞行的设备。飞行设备240包括驱动单元241、电池单元242、传感器单元243和飞行控制单元244。
[0128]
驱动单元241进行用于使无人机200飞行的驱动。驱动单元241例如包括电动机、螺旋桨、将电动机的动力传递给螺旋桨的传递机构等。电池单元242向飞行设备240的各个构成元件供电。传感器单元243感测各种信息。例如,传感器单元243包括陀螺传感器、加速度传感器、位置信息获取单元(例如,全球导航卫星系统(gnss)的信号定位单元)、高度传感器、电池余量传感器、电动机的旋转传感器等。飞行控制单元244进行使无人机200飞行的控制。例如,飞行控制单元244基于从传感器单元243获得的传感器信息来控制驱动单元241,使得使无人机200飞行。
[0129]
(5)处理单元250
[0130]
处理单元250提供终端设备200的各种功能。处理单元250包括获取单元251和测量报告控制单元253。注意,处理单元250还可包括除这些构成元件以外的构成元件。即,处理单元250能够进行除这些构成元件的操作以外的操作。获取单元251和测量报告控制单元253的功能将在后面详细说明。
[0131]
处理单元250连接到飞行设备240。处理单元250可被实现成处理器、电路、集成电路等。
[0132]
《《3.技术特征》》
[0133]
(1)参考信号的测量
[0134]
基站100(例如,参考信号发送单元151)发送参考信号。无人机200(例如,测量报告控制单元253)随后测量从基站100发送的参考信号,以获得指示测量结果的参考信号信息。参考信号信息包括指示例如主小区或相邻小区的诸如参考信号接收功率(rsrp)和参考信号接收质量(rsrq)之类的信号质量的信息。在lte中,为了进行越区切换,在现有技术中也进行这样的测量处理。
[0135]
(2)高度信息
[0136]
无人机200(例如,获取单元251)获取指示高度的测量结果的高度信息。例如,高度信息可以由传感器单元243测量。即,无人机200可以从飞行设备240获取高度信息。存在测量高度信息的各种方法。例如,高度信息可以通过无人机200向地面发射诸如无线电波、红外光和激光之类的电磁波来测量。此外,可以通过gnss来获得高度信息。此外,可以基于气压与高度之间的关系,从气压的测量结果估计高度信息。此外,可以通过接收到的从多个基站100发送的无线电波获得高度信息。
[0137]
通过组合这些测量方法中的两种或更多种方法,无人机200可进一步提高高度信息的精确度。此外,通过利用从基站100发送的校正数据校正测量的高度信息,无人机200可
进一步提高高度信息的精确度。
[0138]
另外,高度信息可由其他设备测量。例如,高度信息可由在无人机200附近飞行的另外的无人机200测量。此外,高度信息可以通过多个基站100接收从无人机200发送的无线电波来获得。在这些情况下,无人机200从其他设备接收高度信息。
[0139]
(3)高度区域设定信息
[0140]
基站100(例如,通知单元153)向无人机200通知高度区域设定信息。
[0141]
高度区域设定信息是用于设定用于对无人机200的高度的状态进行分类的高度区域的信息。无人机200可基于获取的高度信息与高度区域设定信息之间的关系,确定无人机200所属于的高度区域。注意,由于设定的高度区域对应于上述规章,因此高度区域设定信息可随国家或地区而不同。
[0142]
高度区域设定信息至少包括关于其中可高速飞行的高度区域(例如,图2中图解所示的空域22、图5或图6中图解所示的高速飞行高度区域31)的设定。另外,高度区域设定信息可包括关于各种高度区域,比如其中可低速飞行的高度区域(例如,图2中图解所示的空域21)的设定。
[0143]
高度区域设定信息包括用于指定高度区域的阈值,诸如高度区域的上限高度h1和下限高度h2。随后,无人机200基于这些阈值,确定高度信息与高度区域设定信息之间的关系。例如,基于关于高速飞行高度区域的高度区域设定信息,如果高度信息指示的无人机200的高度等于或大于h1并且等于或小于h2,那么无人机200确定高度落在高速飞行高度区域内,否则,确定高度未落在高速飞行高度区域内。
[0144]
高度区域设定信息还可包括用于向指定高度区域的阈值提供余量(即,偏移量)的值hm。在高度区域设定信息包括余量hm的情况下,在随同上限高度h1和下限高度h2一起还考虑到余量hm的时候,无人机200确定无人机200所属于的高度区域。
[0145]
无人机200可在提供滞后的同时确定高度信息与高度区域设定信息之间的关系。即,无人机200可向无人机所属于的高度区域的转变提供滞后。具体地,在无人机200移动到不同的高度区域并在移动后的该高度区域中飞行等于或大于预定时间段的情况下,无人机200确定无人机200属于移动后的高度区域。换句话说,即使无人机200移动到不同的高度区域,无人机200确定无人机200属于最初的高度区域,直到无人机200在移动后的高度区域中飞行等于或大于预定时间段为止。这样,可以抑制由于无人机200在高度区域的边界附近飞行而可能发生的高度区域的过度频繁转变。高度区域设定信息可包括为所述滞后提供上述预定时间的计时器值。在变更后的高度区域被维持超过包含在高度区域设定信息中的计时器值的时间段的情况下,无人机200确定存在高度区域的变更。
[0146]
存在高度区域设定信息的各种通知方法。例如,基站100可通知包含在系统信息(例如,主信息块(mib)或系统信息块(sib))中的高度区域设定信息。此外,基站100可通知包含在诸如在rrc连接重新配置消息中提供的测量配置信息元素(ie)之类的对于各个无人机200单独提供的信息中的高度区域设定信息。
[0147]
此外,高度区域设定信息可包括指示要设定的值的信息,或者可包括指示从当前设定的变更值的信息。
[0148]
注意,可在无人机200处预先设定高度区域设定信息。
[0149]
(4)测量报告
[0150]
无人机200(例如,测量报告控制单元253)基于获取的高度信息与高度区域设定信息之间的关系,控制测量报告处理。
[0151]
具体地,无人机200在测量报告处理中,利用和高度信息与高度区域设定信息之间的关系相应的参数。这样,无人机200可预先识别或预测高度区域的转变,并在测量报告处理上反映该转变,使得无人机200可进行与所述反映相关联的适当的越区切换。
[0152]
例如,在利用高度区域设定信息设定的高度区域包括高度信息指示的高度的情况下,无人机200利用与高度区域相应的参数,控制测量报告处理。即,无人机200利用与无人机200所属于的高度区域相应的参数来控制测量报告处理。另外,在由高度区域设定信息设定的高度区域的上限或下限与高度信息之间的差在阈值之内的情况下,无人机200可利用与高度区域相应的参数来控制测量报告处理。例如,即使无人机200实际上不属于无人机200在偏移量(即,余量hm)之内接近的相邻高度区域,无人机200也可利用与该相邻高度区域相应的参数来控制测量报告处理。这样,无人机200可提前利用预测无人机200在不久的将来属于的高度区域的参数。此外,在无人机200在偏移量(即,余量hm)之内接近于相邻高度区域的情况下,无人机200可利用与无人机200位于高度区域的边界相应的参数来控制测量报告处理。这样,在无人机200在高度区域的边界附近飞行的情况下,无人机200例如可以例外地增大测量频度和报告频度。
[0153]
这里,要控制的测量报告处理可包括从基站100发送的参考信号的测量,和向基站100报告包括指示测量结果的参考信号信息的测量报告消息。在现有技术中也进行所述报告以便进行越区切换。此外,要控制的测量报告处理可包括高度的测量,和向基站100报告包括指示测量结果的高度信息的测量报告消息。要发送给基站100的测量报告消息可包括参考信号信息和高度信息,或者可包括参考信号信息和高度信息之一。
[0154]
和高度信息与高度区域设定信息之间的关系相应的测量报告处理的控制有两种类型,即,测量定时的控制和报告定时的控制。下面将分别说明。
[0155]-测量定时
[0156]
无人机200(例如,测量报告控制单元253)可使得在基于和高度信息与高度区域设定信息之间的关系相应的参数的定时测量高度。例如,无人机200使得在基于与无人机200属于的高度区域、无人机200在偏移量之内接近于的相邻高度区域、或者高度区域的边界相应的参数(例如,后面将说明的h-scale)的定时测量高度。这样,例如,无人机200可随着高度越高而增大测量频度,或者在高速飞行高度区域的边界附近增大高度的测量频度,等等,以有助于基站100进行的越区切换的判断。注意,测量精确度可随着测量频度增大而提高。
[0157]
基站100向无人机200通知高度测量定时设定信息,高度测量定时设定信息包括关于高度的测量定时的参数。随后,无人机200在基于高度测量定时设定信息的定时测量高度。可以将高度设定定时设定信息包括在例如在rrc连接重新配置消息中提供的测量配置ie中并通知所述高度设定定时设定信息。
[0158]
例如,所述高度测量定时设定信息包括关于测量模式的参数,比如测量周期和测量定时的偏移值之类。下面将说明具体的参数及基于该参数的测量定时的设定的例子。例如,假设测量周期的缩放参数是h-scale,测量周期的参数是h-period并且测量偏移参数是h-offset。这种情况下,无人机200在利用以下等式计算的系统帧号(sfn)的子帧的定时测量高度。
[0159]
[数学式1]
[0160]
sfn mod t=floor(h-offset)
…
(1)
[0161]
[数学式2]
[0162]
subframe=h-offsetmod10
…
(2)
[0163]
[数学式3]
[0164]
t=floor(h-period/h-scale)
…
(3)按照上述等式,高度的测量定时以通过利用h-scale缩放h-period而获得的周期出现,并且变成通过把sfn的值除以该周期而获得的余数等于h-offset的sfn的定时。更具体地,高度的测量定时变成参考上述sfn的帧周期之中h-offset的最后一位的值确定的子帧的定时。
[0165]
注意,高度测量定时设定信息可包括要设定的参数本身,或者可包括从当前设定的变化量。
[0166]
此外,可以在与高度的测量定时相应的定时测量参考信号。
[0167]-报告定时
[0168]
无人机200(例如,测量报告控制单元253)可在基于和高度信息与高度区域设定信息之间的关系相应的参数的定时,向基站100报告测量报告消息。例如,无人机200在基于和无人机200属于的高度区域、无人机200在偏移量内接近的相邻高度区域、或者高度区域的边界相应的参数(比如,后面将说明的s-measure)的定时,报告测量报告消息。这样,例如,无人机200可在高速飞行高度区域的边界附近增大报告频度等,从而有助于基站100进行的越区切换的判断。
[0169]
基站100向无人机200通知包括关于高度信息的报告定时的参数的报告定时设定信息。无人机200随后在基于报告定时设定信息的定时报告高度信息。例如,可以将报告定时设定信息包括在例如在rrc连接重新配置消息中提供的测量配置ie中并通知所述报告定时设定信息。
[0170]
注意,现有的lte中的报告定时是发生事件a1至a6等的定时,并且关于事件a1至a6的参数是作为测量配置ie(例如,reportconfig),从基站提供的。在本实施例中,除了这些参数以外,关于高度信息的参数也被包括在测量配置ie中并被通知。此外,可以定义关于高度信息的新的事件。
[0171]
下面将说明包含在报告定时设定信息中的信息的例子。
[0172]
例如,报告定时设定信息可包括指示关于参考信号的测量报告的报告条件的信息。具体地,报告定时设定信息可包括s-measure。s-measure是lte中的定义测量报告的定时的参数之一,并且是与主小区(pcell)的参考信号的质量(例如,rsrp)对应的阈值。在s-measure包含在报告定时设定信息中的情况下,无人机200更新在无人机200处设定的s-measure。这样,无人机200变更测量报告消息的发送定时。
[0173]
注意,报告定时设定信息可以与适合于终端设备300的s-measure分开地包含适合于无人机200的s-measure。或者,报告定时设定信息可以包含指示适合于终端设备300的s-measure与适合于无人机200的s-measure之差的偏移值。
[0174]
此外,报告定时设定信息可包含用于缩放s-measure的缩放因子。
[0175]
例如,报告定时设定信息可包含指示关于高度信息的报告条件的信息。具体地,报告定时设定信息可包含对应于高度信息的阈值。在报告定时设定信息包含对应于高度信息
的阈值的情况下,无人机200在由高度信息指示的高度超过或低于所述阈值的定时发送测量报告消息。这样,无人机200可按照高度信息发送测量报告消息。
[0176]
例如,报告定时设定信息可包含指示从报告条件被满足到发送测量报告消息为止的等待时间(例如,触发时间(time-to-trigger,ttt))的信息。在报告定时设定信息包含指示等待时间的信息的情况下,在自报告条件被满足以来过去了所述等待时间之后,无人机200发送测量报告消息。注意,报告定时设定信息可包含用于缩放等待时间的缩放因子。
[0177]
注意,报告定时设定信息可包括待设定的参数本身,或者可包括从当前设定的变化量。
[0178]
(5)速度的参考
[0179]
无人机200(例如,测量报告控制单元253)可进一步基于指示无人机200的速度的速度信息来控制测量报告处理。用于控制测量报告处理的要参考的速度信息可以是指示垂直方向的速度,比如爬升速度和下降速度的信息。这种情况下,无人机200可以按更高精确度识别或者预先预测高度区域的转变并在测量报告处理中反映所述转变,使得无人机200可进行与所述反映相关联的适当的越区切换。另外,用于控制测量报告处理的要参考的速度信息可以是指示三维方向以及垂直方向的速度的信息。这种情况下,无人机200可以按三维方向预先预测或识别与小区范围的位置关系,并在测量报告处理中反映所述位置关系,使得无人机200可进行与所述反映相关联的适当的越区切换。
[0180]
为此,首先,无人机200(例如,获取单元251)获取指示速度的测量结果的速度信息。例如,速度信息可以由传感器单元243测量。即,无人机200可从飞行设备240获取速度信息。存在用于测量速度信息的各种方法。例如,可以基于由加速度传感器测量的加速度来计算速度信息。此外,可以基于由高度信息指示的高度的时间变化来计算速度信息。
[0181]
通过组合这些测量方法中的两种或更多种方法,无人机200可进一步提高速度信息的精确度。此外,通过利用从基站100发送的校正数据校正测量的速度信息,无人机200可进一步提高速度信息的精确度。
[0182]
另外,速度信息可由其他设备测量。例如,速度信息可由在无人机200附近飞行的另外的无人机200测量。此外,速度信息可由基站100基于由高度信息指示的高度的时间变化来计算。在这些情况下,无人机200从其他设备接收速度信息。
[0183]
按照类似于基于高度信息的控制的方式,按照速度信息的测量报告处理的控制包括测量定时的控制和报告定时的控制。
[0184]-测量定时
[0185]
无人机200(例如,测量报告控制单元253)可使得在基于与速度信息相应的参数的定时测量高度。这样,无人机200可以例如随着速度越快而增大高度的测量频度,从而有助于基站100的越区切换的判断。
[0186]
这种情况下,从基站100向无人机200通知的高度测量定时设定信息包括关于速度信息的参数。这样,高度的测量定时变成基于关于速度信息的参数的定时。例如,无人机200在由速度信息指示的速度超过或低于阈值的定时测量高度。此外,无人机200可按照速度信息控制测量周期,或者可缩放测量周期。
[0187]-报告定时
[0188]
无人机200(例如,测量报告控制单元253)可在基于与速度信息相应的参数的定
时,向基站100报告测量报告消息。这样,无人机200可以例如随着速度越快而增大报告频度,从而有助于基站100的越区切换的判断。
[0189]
这种情况下,从基站100向无人机200通知的报告定时设定信息包括关于速度信息的参数。这样,报告定时变成基于关于速度信息的参数的定时。例如,无人机200在由速度信息指示的速度超过或低于阈值的定时发送测量报告消息。此外,无人机200可按照速度信息控制报告周期,或者可缩放报告周期。
[0190]
当然,可以基于高度信息和速度信息的组合来控制测量报告处理。此外,测量报告消息可包括速度信息。
[0191]
(6)终端属性信息
[0192]
无人机200(例如,测量报告控制单元253)向基站100通知指示进行与高度信息和高度区域设定信息之间的关系相应的处理的信息。更简单地,无人机200向基站100通知指示无人机200是否具有飞行能力的信息,即,指示无人机200是否是无人机的信息。在下面的说明中,该信息也将被称为终端属性信息(对应于lte中的ue能力信息)。
[0193]
基站100可从终端属性信息识别出无人机200是无人机,并通知用于无人机的信息(比如高度区域设定信息、高度测量定时设定信息和报告定时设定信息之类)。注意,基站100可向无人机200通知用于请求无人机200通知终端属性信息的询问消息。
[0194]
(7)测量报告消息
[0195]
无人机200向基站100报告测量报告消息。所述测量报告消息至少包括参考信号信息或高度信息之一。一般地,测量报告消息包括参考信号信息和高度信息两者。此外,测量报告消息可包括速度信息。
[0196]
测量报告消息包括与报告对象的测量id对应的测量结果ie。注意,测量id是与参考信号测量处理或高度测量处理关联的标识信息。
[0197]
存在高度测量定时的周期不同于报告定时的周期的情况。因此,例如,测量报告消息可包括多份高度信息或者所述多份高度信息的平均值。此外,要报告的高度信息的份数可被限制为紧接报告前的预定数,或者可以报告预定份数的高度信息或者预定份数的高度信息的平均值。
[0198]
(8)越区切换
[0199]
基站100(例如,越区切换控制单元155)控制与从无人机200报告的测量报告消息相应的越区切换处理。例如,基站100基于包含在从无人机200报告的测量报告消息中的高度信息、速度信息或参考信号信息中的至少一项,来判断是否可执行越区切换并选择目标基站。在执行越区切换的情况下,基站100向目标基站发送越区切换请求。
[0200]
(9)处理流程
[0201]
随后将参考图10和图11,说明本实施例中的处理流程。
[0202]
图10是图解说明在按照本实施例的无人机200处执行的测量报告处理的流程的例子的流程图。如图10中图解所示,首先,无人机200从基站100接收高度区域设定信息(步骤s202)。随后,无人机200基于高度信息与高度区域设定信息之间的关系,设定高度测量定时(步骤s204)。然后,无人机200基于高度信息与高度区域设定信息之间的关系,设定报告定时(步骤s206)。之后,无人机200按照设定的高度测量定时测量高度,并按照设定的报告定时报告测量报告消息。
[0203]
图11是图解说明在按照本实施例的系统1中执行的测量报告处理的流程的例子的序列图。该序列涉及基站100和无人机200。
[0204]
如图11中图解所示,当无人机200驻留(camp on)时,无人机200从基站100获取系统信息(步骤s302)。所述系统信息例如包括高度区域设定信息。
[0205]
随后,基站100向无人机200询问终端属性信息(步骤s304),并且无人机200向基站100发送终端属性信息(步骤s306)。这样,基站100识别出通信伙伴是无人机。
[0206]
随后,基站100向无人机200发送例如包含高度测量定时设定信息和报告定时设定信息的rrc连接重新配置消息(步骤s308)。更具体地,基站100把和高度信息与高度区域设定信息之间的关系相应的、用于设定高度的测量定时和报告定时的参数发送给无人机200。
[0207]
随后,无人机200在与高度测量定时设定信息相应的定时,即,在基于和高度信息与高度区域设定信息之间的关系相应的参数的定时测定高度(步骤s310)。
[0208]
随后,无人机200在与报告定时设定信息相应的定时进行报告。例如,无人机200确定报告条件(步骤s312)。更具体地,无人机200确定待确定的定时(例如,当前时间)是否是基于和高度信息与高度区域设定信息之间的关系相应的参数的定时。随后,在确定报告条件被满足的情况下,无人机200向基站100报告包括参考信号信息和高度信息的测量报告消息(步骤s314)。
[0209]
《《4.应用例》》
[0210]
按照本公开的技术可适用于各种产品。例如,基站100可被实现成任意类型的演进节点b(enb),比如宏enb或小enb之类。小enb可以是覆盖比宏小区小的小区的enb,比如皮enb,微enb或者家庭(飞)enb之类。基站100可改为被实现成另外类型的基站,比如node b或基站收发器(bts)之类。基站100可包括控制无线通信的主实体(也被称为基站设备)和置于与所述主实体不同的地方的一个或多个远程无线电头端(rrh)。此外,下面说明的各种终端通过临时或半永久地执行基站功能,可以起基站100的作用。
[0211]
《4.1.基站的应用例》
[0212]
(第一应用例)
[0213]
图12是图解说明按照本公开的技术可适用于的enb的示意配置的第一例子的方框图。enb 800包括一个或多个天线810,和基站设备820。各个天线810和基站设备820可通过rf线缆相互连接。
[0214]
各个天线810包括单个或多个天线元件(例如,构成mimo天线的多个天线元件),并被基站设备820用于发送和接收无线信号。enb 800可包括多个天线810,如图12中图解所示,并且例如,所述多个天线810可以对应于由enb 800使用的多个频带。应注意的是尽管图12图解说明其中enb 800包括多个天线810的例子,不过,enb 800可包括单个天线810。
[0215]
基站设备820包括控制器821、存储器822、网络接口823和无线通信接口825。
[0216]
控制器821可以是例如cpu或dsp,并操作基站设备820的上层的各种功能。例如,控制器821根据由无线通信接口825处理的信号中的数据生成数据分组,并通过网络接口823传送生成的分组。控制器821可通过对来自多个基带处理器的数据打包生成打包分组,以传送生成的打包分组。此外,控制器821还可具有进行诸如无线电资源控制、无线电承载控制、移动性管理、接纳控制和调度之类的控制的逻辑功能。此外,可与周围的enb或核心网络节点协同地进行所述控制。存储器822包括ram和rom,并存储由控制器821执行的程序以及各
种控制数据(比如终端列表、发送功率数据和调度数据之类)。
[0217]
网络接口823是连接基站设备820和核心网络824的通信接口。控制器821可通过网络接口823与核心网络节点或另外的enb通信。这种情况下,enb 800可通过逻辑接口(例如s1接口或x2接口)连接到核心网络节点或另外的enb。网络接口823可以是有线通信接口,或者用于无线回程的无线通信接口。在网络接口823是无线通信接口的情况下,网络接口823可以把比由无线通信接口825使用的频带更高的频带用于无线通信。
[0218]
无线通信接口825支持诸如长期演进(lte)或lte-advanced之类的蜂窝通信系统,并通过天线810提供与位于enb 800的小区内的终端的无线连接。无线通信接口825一般可包括基带(bb)处理器826、rf电路827等。bb处理器826可进行例如编码/解码、调制/解调、复用/解复用等,并进行每个层(例如l1、媒体接入控制(mac)、无线链路控制(rlc)、和分组数据汇聚协议(pdcp)之类)上的各种信号处理。bb处理器826可代替控制器821具有部分或所有上述逻辑功能。bb处理器826可以是包括存储有通信控制程序的存储器、执行所述程序的处理器以及相关电路的模块,并且通过更新所述程序,bb处理器826的功能可以被变更。此外,所述模块可以是插入基站设备820的插槽中的卡或刀片,或者安装在所述卡或刀片上的芯片。同时,rf电路827可包括混频器、滤波器、放大器等,并通过天线810发送和接收无线信号。
[0219]
无线通信接口825可包括多个bb处理器826,如图12中图解所示,并且例如,所述多个bb处理器826可对应于由enb 800使用的多个频带。此外,无线通信接口825还可包括多个rf电路827,如图12中图解所示,并且例如,所述多个rf电路827可对应于多个天线元件。注意,图12图解说明其中无线通信接口825包括多个bb处理器826和多个rf电路827的例子,不过,无线通信接口825可包括单个bb处理器826或单个rf电路827。
[0220]
在图12中图解所示的enb 800中,包含在参考图8说明的处理单元150中的一个或多个构成元件(例如,参考信号发送151、通知单元153和/或越区切换控制单元155)可在无线通信接口825中实现。或者,这些构成元件中的至少一些可在控制器821中实现。例如,包含无线通信接口825的部分(例如,bb处理器826)或全部和/或控制器821的模块可在enb 800上实现。所述一个或多个构成元件可在所述模块中实现。这种情况下,所述模块可存储使处理器起所述一个或多个构成元件作用的程序(换句话说,使处理器执行所述一个或多个构成元件的操作的程序),并执行所述程序。再例如,在enb 800中,可安装使处理器起所述一个或多个构成元件作用的程序,并且无线通信接口825(例如,bb处理器826)和/或控制器821可执行所述程序。这样,可作为包括所述一个或多个构成元件的设备而提供enb 800、基站设备820或所述模块,并且可以提供使处理器起所述一个或多个构成元件作用的程序。另外,可以提供记录所述程序的可读记录介质。
[0221]
此外,在图12中图解所示的enb 800中,参考图8说明的无线通信单元120可在无线通信接口825(例如,rf电路827)中实现。此外,天线单元110可在天线810处实现。此外,网络通信单元130可在控制器821和/或网络接口823处实现。此外,存储单元140可在存储器822处实现。
[0222]
(第二应用例)
[0223]
图13是图解说明按照本公开的技术可适用于的enb的示意配置的第二例子的方框图。enb 830包括一个或多个天线840,基站设备850和rrh 860。各个天线840和rrh 860可通
过rf线缆相互连接。此外,基站设备850和rrh 860可以通过诸如光缆之类的高速线路相互连接。
[0224]
各个天线840包括单个或多个天线元件(例如,构成mimo天线的天线元件),并被rrh 860用于发送和接收无线信号。enb 830可包括多个天线840,如图13中图解所示,并且例如,所述多个天线840可对应于enb 830使用的多个频带。注意图13图解说明其中enb 830包括多个天线840的例子,不过,enb 830可包括单个天线840。
[0225]
基站设备850包括控制器851、存储器852、网络接口853、无线通信接口855和连接接口857。控制器851、存储器852和网络接口853类似于参考图12说明的控制器821、存储器822和网络接口823。
[0226]
无线通信接口855支持诸如lte和lte-advanced之类的蜂窝通信系统,并通过rrh 860和天线840提供与位于对应于rrh 860的扇区中的终端的无线连接。无线通信接口855一般可包括bb处理器856等。除了bb处理器856经连接接口857连接到rrh 860的rf电路864之外,bb处理器856类似于参考图12说明的bb处理器826。无线通信接口855可包括多个bb处理器856,如图13中图解所示,并且例如,所述多个bb处理器856可对应于enb 830使用的多个频带。注意图13图解说明其中无线通信接口855包括多个bb处理器856的例子,不过,无线通信接口855可包括单个bb处理器856。
[0227]
连接接口857是用于连接基站设备850(无线通信接口855)和rrh 860的接口。连接接口857可以是用于连接基站设备850(无线通信接口855)和rrh 860的高速线路上的通信的通信模块。
[0228]
此外,rrh 860包括连接接口861和无线通信接口863。
[0229]
连接接口861是连接rrh 860(无线通信接口863)和基站设备850的接口。连接接口861可以是用于高速线路上的通信的通信模块。
[0230]
无线通信接口863通过天线840发送和接收无线信号。无线通信接口863一般包括rf电路864等。rf电路864可包括混频器、滤波器、放大器等,并通过天线840发送和接收无线信号。无线通信接口863可包括多个rf电路864,如图13中图解所示,并且例如,所述多个rf电路864可对应于多个天线元件。注意图13图解说明其中无线通信接口863包括多个rf电路864的例子,不过,无线通信接口863可包括单个rf电路864。
[0231]
在图13中图解所示的enb 830中,包含在参考图8说明的处理单元150中的一个或多个构成元件(例如,参考信号发送单元151、通知单元153和/或越区切换控制单元155)可在无线通信接口855和/或无线通信接口863中实现。或者,这些构成元件中的至少一些可在控制器851中实现。例如,包含无线通信接口855的部分(例如,bb处理器856)或全部和/或控制器851的模块可在enb 830上实现。所述一个或多个构成元件可在所述模块中实现。这种情况下,所述模块可存储使处理器起所述一个或多个构成元件作用的程序(换句话说,使处理器执行所述一个或多个构成元件的操作的程序),并执行所述程序。再例如,在enb 830中,可安装使处理器起所述一个或多个构成元件作用的程序,并且无线通信接口855(例如,bb处理器856)和/或控制器851可执行所述程序。这样,可作为包括所述一个或多个构成元件的设备而提供enb 830、基站设备850或所述模块,并且可以提供使处理器起所述一个或多个构成元件作用的程序。另外,可以提供记录所述程序的可读记录介质。
[0232]
此外,在图13中图解所示的enb 830中,例如,参考图8说明的无线通信单元120可
在无线通信接口863(例如,rf电路864)中实现。此外,天线单元110可在天线840处实现。此外,网络通信单元130可在控制器851和/或网络接口853处实现。此外,存储单元140可在存储器852处实现。
[0233]
《《5.结论》》
[0234]
上面参考图1至图13,已经详细说明了本公开的实施例。如上所述,按照本实施例的无人机200获取指示高度的测量结果的高度信息,并基于高度信息与高度区域设定信息之间的关系,控制向基站100报告包括指示从基站100发送的参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。这样,基站100可掌握无人机200的高度,并使无人机200适当地执行越区切换。与之相关联,由于无人机200的越区切换的失败被减少,因此越区切换变得高效。结果,运营商可以利用小小区实现对许多无人机200的接纳。
[0235]
上面参考附图,已经说明了本公开的优选实施例,然而本公开不限于上面的例子。在附加的权利要求书的范围之内,本领域的技术人员可以得到各种变型和修改,应明白的是所述各种变型和修改自然在本公开的技术范围之内。
[0236]
例如,尽管说明了从基站100向无人机200通知高度区域设定信息、高度测量定时设定信息和报告定时设定信息,不过,信息的提供源不限于基站100。例如,可以从因特网上的服务器提供所述信息,并通过基站100向无人机200通知所述信息。
[0237]
此外,无人机200不限于狭义的无人机。例如,无人机200可以是通过蜂窝通信控制的任意飞行器。
[0238]
此外,尽管上面主要关于高速飞行高度区域进行了说明,不过,本技术不限于这样的例子。例如,本技术可适用于诸如低速飞行高度区域之类的其他高度区域。
[0239]
此外,在本说明书中,利用流程图和序列图说明的处理不一定必须按照图解所示的顺序执行。一些处理步骤可以并行执行。此外,可以采用另外的处理步骤,或者可以省略部分处理步骤。
[0240]
此外,记载在本说明书中的效果仅仅是说明性或例证性的效果,而不是限制性的。即,连同上述效果一起或者代替上述效果,按照本公开的技术可以获得基于本说明书的记载对本领域的技术人员来说清楚的其他效果。
[0241]
另外,也可如下配置本技术。
[0242]
(1)一种电路,包括:
[0243]
获取单元,所述获取单元被配置成获取指示高度的测量结果的高度信息;和
[0244]
测量报告控制单元,所述测量报告控制单元被配置成基于由所述获取单元获取的高度信息与高度区域设定信息之间的关系,控制向基站报告包括指示从基站发送的参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
[0245]
(2)按照(1)所述的电路,
[0246]
其中在由所述高度区域设定信息设定的高度区域包括由所述高度信息指示的高度的情况下,或者在由所述高度区域设定信息设定的高度区域的上限或下限与由所述高度信息指示的高度之差在阈值之内的情况下,所述测量报告控制单元利用与所述高度区域相应的参数来控制所述测量报告处理。
[0247]
(3)按照(1)或(2)所述的电路,
[0248]
其中所述测量报告控制单元使得在基于与所述关系相应的参数的定时测量高度。
[0249]
(4)按照(1)至(3)任意之一所述的电路,
[0250]
其中所述测量报告控制单元在基于与所述关系相应的参数的定时,向所述基站报告所述测量报告消息。
[0251]
(5)按照(1)至(4)任意之一所述的电路,
[0252]
其中所述获取单元获取速度信息,和
[0253]
所述测量报告控制单元还基于所述速度信息来控制所述测量报告处理。
[0254]
(6)按照(5)所述的电路,
[0255]
其中所述测量报告控制单元使得在基于与所述速度信息相应的参数的定时测量高度。
[0256]
(7)按照(5)或(6)所述的电路,
[0257]
其中所述测量报告控制单元在基于与所述速度信息相应的参数的定时,向所述基站报告所述测量报告消息。
[0258]
(8)按照(5)至(7)任意之一所述的电路,
[0259]
其中所述速度信息是指示垂直方向的速度的信息。
[0260]
(9)按照(1)至(8)任意之一所述的电路,
[0261]
其中所述测量报告控制单元向所述基站通知指示进行与所述关系相应的处理的信息。
[0262]
(10)按照(1)至(9)任意之一所述的电路,
[0263]
其中所述测量报告控制单元在提供滞后的同时确定所述关系。
[0264]
(11)按照(1)至(10)任意之一所述的电路,
[0265]
其中所述高度区域设定信息至少包括关于可以进行高速飞行的高度区域的设定。
[0266]
(12)按照(1)至(11)任意之一所述的电路,
[0267]
其中所述获取单元从能够飞行的飞行设备获取所述高度信息。
[0268]
(13)按照(12)所述的电路,
[0269]
其中所述电路连接到所述飞行设备。
[0270]
(14)一种基站,包括:
[0271]
参考信号发送单元,所述参考信号发送单元被配置成发送参考信号;和
[0272]
通知单元,所述通知单元被配置成向终端设备通知高度区域设定信息,所述终端设备基于指示高度的测量结果的高度信息与所述高度区域设定信息之间的关系,控制报告包括指示所述参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
[0273]
(15)按照(14)所述的基站,
[0274]
其中所述通知单元将所述高度区域设定信息包括在系统信息或者无线电资源控制(rrc)连接重新配置消息中并通知。
[0275]
(16)按照(14)或(15)所述的基站,还包括:
[0276]
越区切换控制单元,所述越区切换控制单元被配置成控制与从所述终端设备报告的测量报告消息相应的越区切换处理。
[0277]
(17)一种方法,包括:
[0278]
获取指示高度的测量结果的高度信息;和
[0279]
通过处理器,基于获取的所述高度信息与高度区域设定信息之间的关系,控制向基站报告包括指示从基站发送的参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
[0280]
(18)一种方法,包括:
[0281]
发送参考信号;和
[0282]
通过处理器,向终端设备通知高度区域设定信息,所述终端设备基于指示高度的测量结果的高度信息与所述高度区域设定信息之间的关系,控制报告包括指示所述参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
[0283]
(19)一种记录有程序的记录介质,所述程序使计算机起以下作用:
[0284]
获取单元,所述获取单元被配置成获取指示高度的测量结果的高度信息;和
[0285]
测量报告控制单元,所述测量报告控制单元被配置成基于由所述获取单元获取的高度信息与高度区域设定信息之间的关系,控制向基站报告包括指示从基站发送的参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
[0286]
(20)一种记录有程序的记录介质,所述程序使计算机起以下作用:
[0287]
参考信号发送单元,所述参考信号发送单元被配置成发送参考信号;和
[0288]
通知单元,所述通知单元被配置成向终端设备通知高度区域设定信息,所述终端设备基于指示高度的测量结果的高度信息与所述高度区域设定信息之间的关系,控制报告包括指示所述参考信号的测量结果的参考信号信息以及所述高度信息的测量报告消息的测量报告处理。
[0289]
附图标记列表
[0290]
1 系统
[0291]
31
ꢀꢀ
高速飞行高度区域
[0292]
100 基站
[0293]
110 天线单元
[0294]
120 无线通信单元
[0295]
130 网络通信单元
[0296]
140 存储单元
[0297]
150 处理单元
[0298]
151 参考信号发送单元
[0299]
153 通知单元
[0300]
155 越区切换控制单元
[0301]
200 终端设备,无人机
[0302]
210 天线单元
[0303]
220 无线通信单元
[0304]
230 存储单元
[0305]
240 飞行设备
[0306]
241 驱动单元
[0307]
242 电池单元
[0308]
243 传感器单元
[0309]
244 飞行控制单元
[0310]
250 处理单元
[0311]
251 获取单元
[0312]
253 测量报告控制单元
[0313]
300 终端设备
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1