一种基于地理位置修正的AODV路由方法
一种基于地理位置修正的aodv路由方法
技术领域
1.本发明涉及无人机自组网技术领域,具体涉及一种基于地理位置修正的aodv路由方法。
背景技术:
2.无人机作为空天地一体化通信系统中不可或缺的载体,在当前大国竞争的环境下成为了一项研究热点。以临时方式组建的无人机自组网(flying ad-hoc networks,fanet)作为无人机领域最重要的发展方向之一,也是无人机发展需要突破的关键技术之一。与传统的无线自组织网络(mobilead-hoc networks,manet)相比,fanet为了适应无人机特性,具有以下不同点:1.无人机在飞行过程中由于其内置电源容量有限,因此fanet需要进行节点间通信能耗的优化,以此来提高无人机网络的整体性能;2.无人机高速移动的特点,导致了网络节点具有高动态变化性,这种变化会改变路由执行的效率,因此fanet在高动态拓扑与节点分布不均匀的网络环境中能否保持高稳定可靠的通信成为其关键点;3.高传输速率和低延迟是无人机网络环境中的重要需求,在有限的条件下进行速度与延迟的控制也是fanet协议需要考虑的因素。
3.aodv(ad hoc on-demand distance vector)路由协议是manet中典型的按需式路由协议,不仅具有dsr(dynamic source routing)中路由探索和路由维护的基本思想,还采用了dsdv(destination sequenced distance vector)中逐跳路由、单增序列号和周期更新机制来防止环路产生。aodv路由协议非常适合于带宽、功率等网络资源有限的环境。但要作为无人机自组网路由协议,根据fanet的特性要求,aodv协议的开发仍存在一定局限性。
技术实现要素:
4.本发明的目的在于提供一种基于地理位置修正的aodv路由方法,旨在针对无人机自组网中因存在定位误差导致链路预测不准确的情况,提高网络整体性能,使aodv协议更适用于fanet环境。
5.为实现上述目的,本发明提供了一种基于地理位置修正的aodv路由方法,包括下列步骤:
6.引入链路预测算法;
7.新增数据域进行扩展;
8.使用改进粒子滤波的位置修正算法修正定位误差;
9.根据修正后的位置估计链路失效时间;
10.计算路由置信水平作为路由择路可信度依据。
11.其中,所述链路预测算法利用极短时间内的非随机的飞行模式,预测拓扑未来一小段时间内的状态。
12.其中,新增数据域进行扩展的过程,具体为在rreq报文格式中新增链路失效时间数据域,在路由表项中新增数据域用来存储修正后的x坐标、修正后的y坐标、标准偏差和链
路失效时间。
13.其中,所述改进粒子滤波的位置修正算法4.是一种使用卡尔曼滤波联合粒子滤波的改进算法,包括下列步骤:
14.粒子群初始化;
15.计算卡尔曼增益,进行重要性采样;
16.重采样;
17.估计目标节点状态。
18.其中,所述修正后的位置估计链路失效时间由改进粒子滤波中的估计误差协方差矩阵计算得到。
19.其中,所述路由置信水平使用链路生效时间作为计算依据,当节点间的链路失效时间小于节点端到端的最小生存阈值时,此时的链路被视为危险链路。
20.其中,在计算路由置信水平作为路由择路可信度依据的过程中,通过计算路由置信水平,决定是否转发封包。
21.本发明提供了一种基于地理位置修正的aodv路由方法,采用一种改进粒子滤波算法对测量位置误差进行补偿,在传统粒子滤波的重要性采样阶段引入无迹卡尔曼思想计算粒子的均值和协方差,避免位置估计中存在的粒子退化问题;此外利用修正后的节点位置信息预测链路失效时间let,选择具有最大let的路径通信,并且在路由发现阶段考虑路由置信水平,将链路持续时间置信度作为端到端最小生存阈值,降低危险链路带来的风险;与传统aodv路由方法和基于理想位置信息进行链路预测的改进协议相比,改进后的协议提升了整体路由性能,具有更强的链路稳定性,对定位误差具有鲁棒性,更加适用于高动态的无人机自组网环境。
附图说明
22.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
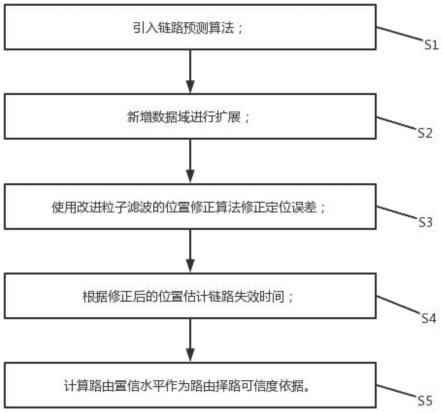
23.图1是本发明的一种基于地理位置修正的aodv路由方法的流程示意图。
24.图2是本发明的一种基于地理位置修正的aodv路由方法的路由表项格式图。
25.图3是本发明的一种基于地理位置修正的aodv路由方法的rreq消息帧格式图。
26.图4是本发明的一种基于地理位置修正的aodv路由方法的改进粒子滤波工作流程图。
27.图5是本发明的一种基于地理位置修正的aodv路由方法的路由请求工作流程图。
28.图6为本发明具体实施例的不同速率下的平均端到端时延对比图。
29.图7为本发明具体实施例的不同速率下的分组投递率对比图。
30.图8为本发明具体实施例的不同速率下的路由发起频率对比图。
31.图9为本发明具体实施例的不同速率下的路由控制开销对比图。
具体实施方式
32.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
33.请参阅图1,本发明提供了一种基于地理位置修正的aodv路由方法,包括下列步骤:
34.s1:引入链路预测算法;
35.s2:新增数据域进行扩展;
36.s3:使用改进粒子滤波的位置修正算法修正定位误差;
37.s4:根据修正后的位置估计链路失效时间;
38.s5:计算路由置信水平作为路由择路可信度依据。
39.所述链路预测算法利用极短时间内的非随机的飞行模式,预测拓扑未来一小段时间内的状态。
40.具体在本发明中,链路预测算法为:
41.(d
p
)2=[a+te]2+[b+tf]2+[c+tg]2=t2(e2+f2+g2)+2t(ea+fb+gc)+a2+b2+c2ꢀꢀ
(1)
[0042]
t2(e2+f2+g2)+2t(ea+fb+gc)+a2+b2+c
2-r2=0
ꢀꢀ
(2)
[0043]
mt2+nt+o=0
ꢀꢀ
(3)
[0044][0045]
其中,假设在有限的拓扑区域内,存在无人机节点1和节点2。d
p
为两节点欧几里得距离;a为节点1和节点2的x轴坐标变化量;b为节点1和节点2的y轴坐标变化量;c为节点1和节点2的z轴坐标变化量;e为x轴速度变化量;f为y轴速度变化量;g为z轴速度变化量。当经过t时间后,两节点间距离达到最大通信范围r,且令(e2+f2+g2)=m,(2ea+2fb+2gc)=n,a2+b2+c
2-r2=o,即可解得预测的最终链路失效时间t
exp
。
[0046]
在新增数据域进行扩展的过程中,在rreq报文格式中新增链路失效时间数据域,在路由表项中新增数据域用来存储修正后的x坐标、修正后的y坐标、标准偏差和链路失效时间,如图2和图3所示。
[0047]
使用改进粒子滤波的位置修正算法修正定位误差,改进粒子滤波工作流程请参阅图4,包括下列步骤:
[0048]
粒子群初始化;
[0049]
计算卡尔曼增益,进行重要性采样;
[0050]
重采样;
[0051]
估计目标节点状态。
[0052]
可选的,粒子群初始化过程为:在空间中随机生成目标节点的粒子集其中n为粒子数,wi(tk)为权重,初始时刻赋予每个粒子相同的权重,即wi(t0)=1/n。
[0053]
可选的,重要性采样过程对每个粒子应用ukf算法,就单一粒子而言,将该粒子的分布视为高斯分布,并通过ut变换计算它的sigma点集。根据sigma点集的状态预测结果,采
用加权求和的方式计算新点集的期望以及协方差,并最终计算卡尔曼增益。
[0054]
其中,卡尔曼增益计算公式为:
[0055]
k(tk)=p
i-(tk,t
k-1
)[p
i-(tk,t
k-1
)]-1
ꢀꢀ
(5)
[0056]
其中p
i-(tk,t
k-1
)为当前时刻和前一时刻粒子状态的协方差矩阵。
[0057]
可选的,重采样过程选择权重较低的粒子大概率被舍弃,而权重较高的粒子则大概率被保留至下一次迭代,这样就可以将下一轮滤波的考虑重点缩小到高权重粒子附近,采样后的粒子集为{xi(tk),1/n}。
[0058]
可选的,目标节点状态估计表达式如下:
[0059][0060]
根据修正后的位置估计链路失效时间,给出整条链路的失效时间let表示为:
[0061]
let<source,dest>=min[t
exp
(i,j)]
ꢀꢀ
(7)
[0062]
其中t
exp
(i,j)代表链路中任意两点间的失效时间,整体链路的链路失效时间let用节点间失效时间的最小值表示。
[0063]
可选的,计算路由置信水平作为路由择路可信度依据,定义节点i与节点j之间的链路持续时间置信度ε为:
[0064][0065]
其中,为节点i与节点j的相对速度。
[0066]
本发明的路由请求工作流程为:
[0067]
step1:源节点有发送数据的需求,遍历路由表后发现没有到达目的节点的有效路由,此时开启路由寻路进程,产生路由请求分组,并在分组中添加节点修正后地理位置信息和标准偏差,同时初始化链路失效时间(rq-》linkduration)为无穷大,转step2;
[0068]
step2:节点接收到路由请求报文后,判断自身是否为源节点,如果是源节点重复接收,转step9;否则,判断自身是否收到过此路由请求分组,若已接收过,转step9;否则,将收到的广播分组存入broadcast id后转step3;
[0069]
step3:应用改进粒子滤波对节点的位置信息进行修正,根据式(4)预测上一跳节点与本节点间的链路失效时间texp,并且,根据上一跳节点与本节点的标准偏差计算时间置信度ε,转step4;
[0070]
step4:比较节点间的链路失效时间texp与时间置信度ε的大小,如果t
exp
>ε,转step9;否则,转step5;
[0071]
step5:比较分组的链路失效时间(此处用let表示)与节点间的链路失效时间texp的大小,如果let》texp,将texp赋值给let,转step6;否则直接转step6;
[0072]
step6:比较分组的链路失效时间(rq-》linkduration)与反向路由表所缓存的路由失效时间(rt0-》linkduration)的大小,如果(rq-》linkduration)》(rt0-》linkduration),更新路由表项其他信息,将(rq-》linkduration)赋值给(rt0-》linkduration),并且修改路由生存时间,之后转step7;否则直接转step7;
[0073]
step7:判断本节点是否为目的节点,若是,回复rrep报文,转step9;若不是,判断
中间节点是否存在到达目的节点的有效路由,如果存在,回复rrep报文,转step9;如果不存在转step8;
[0074]
step8:表明节点此时为中间节点且无到目的节点的有效路由,那么更新rreq的相关数据域,转发rreq分组;
[0075]
step9:丢弃分组。
[0076]
进一步的,本发明还提供了一个具体的实施例进行说明与比较:
[0077]
利用ns2.35网络协议仿真模拟器来模拟具体的通信过程,其仿真参数如表1所示:
[0078]
表1仿真参数
[0079][0080][0081]
仿真对比了aodv with hello、aodv without hello、load with hello、load without hello以及本发明提出的一种基于地理位置修正的aodv路由方法pf-aodv。从图6至图9可以看出,改进后的路由协议在性能表现上均有不同程度的提高。仿真结果表明,网络的平均端到端时延、路由发起频率与路由控制开销大幅降低,分组投递率提高较为明显。本发明在整体上提升了链路稳定性,减少了网络断裂的可能,综合提高网络的性能,证明本发明能够达到优化无人机自组网性能的目的,为其实现发展创造了更大的可能性。
[0082]
以上所揭露的仅为本发明一种较佳实施例而已,当然不能以此来限定本发明之权利范围,本领域普通技术人员可以理解实现上述实施例的全部或部分流程,并依本发明权利要求所作的等同变化,仍属于发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1